双线性内插法
- 格式:ppt
- 大小:1.55 MB
- 文档页数:29
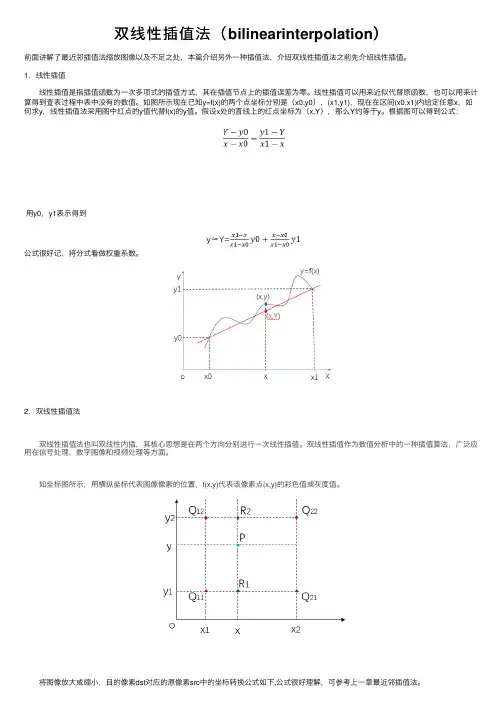
双线性插值法(bilinearinterpolation)前⾯讲解了最近邻插值法缩放图像以及不⾜之处,本篇介绍另外⼀种插值法,介绍双线性插值法之前先介绍线性插值。
1. 线性插值 线性插值是指插值函数为⼀次多项式的插值⽅式,其在插值节点上的插值误差为零。
线性插值可以⽤来近似代替原函数,也可以⽤来计算得到查表过程中表中没有的数值。
如图所⽰现在已知y=f(x)的两个点坐标分别是(x0,y0),(x1,y1),现在在区间(x0,x1)内给定任意x,如何求y,线性插值法采⽤图中红点的y值代替f(x)的y值。
假设x处的直线上的红点坐标为(x,Y),那么Y约等于y。
根据图可以得到公式:⽤y0,y1表⽰得到公式很好记,将分式看做权重系数。
2. 双线性插值法 双线性插值法也叫双线性内插,其核⼼思想是在两个⽅向分别进⾏⼀次线性插值。
双线性插值作为数值分析中的⼀种插值算法,⼴泛应⽤在信号处理,数字图像和视频处理等⽅⾯。
如坐标图所⽰,⽤横纵坐标代表图像像素的位置,f(x,y)代表该像素点(x,y)的彩⾊值或灰度值。
将图像放⼤或缩⼩,⽬的像素dst对应的原像素src中的坐标转换公式如下,公式很好理解,可参考上⼀章最近邻插值法。
srcX=dstX*(srcWidth/dstWidth) srcY=dstY*(srcHeight/dstHeight) 上式中,dstX与dstY为⽬标图像的某个像素的横纵坐标,dstWidth与dstHeight为⽬标图像的长与宽;srcWidth与srcHeight为原图像的宽度与⾼度。
srcX,srcY为⽬标图像在该点(dstX,dstY)对应的原图像的坐标。
现在假设⽬标图像的像素点(x’,y’)映射到原图像中是(x,y),也就是图中的P点。
设Q11 = (x1, y1)、Q12 = (x1, y2)、Q21 = (x2, y1) 、Q22 = (x2, y2),图中Q11,Q12,Q21,Q22分别为距离P点的最近的四个点。
内插法的计算公式在数学和金融等领域,内插法是一种常用的计算方法,它能够帮助我们在已知的数据点之间估算未知的值。
内插法的应用范围广泛,从科学研究到金融分析,都能看到它的身影。
那什么是内插法呢?简单来说,就是在已知的两个点之间,根据一定的规律和假设,推测出中间未知点的值。
为了实现这个目的,我们需要用到内插法的计算公式。
内插法的基本原理基于线性关系。
假设我们有两个已知点(x₁, y₁) 和(x₂, y₂),现在要估算一个位于 x₁和 x₂之间的 x 所对应的 y 值。
内插法的计算公式为:y = y₁+(y₂ y₁) /(x₂ x₁) ×(xx₁)我们来逐步拆解这个公式,以便更好地理解。
首先,(y₂ y₁) /(x₂ x₁) 这个部分表示的是两个已知点之间的斜率。
斜率反映了数据的变化趋势。
然后,(x x₁) 表示我们要估算的点与已知点x₁之间的水平距离。
最后,将这两个部分相乘,就得到了在这个斜率下,水平距离所对应的垂直变化量。
再加上 y₁,就得到了估算的 y 值。
为了更直观地理解内插法的计算公式,我们来看一个实际的例子。
假设某商品的价格与销售量之间存在一定的关系。
已知当价格为 10 元时,销售量为 500 件;当价格为 15 元时,销售量为 300 件。
现在我们想知道当价格为 12 元时,销售量大概是多少。
首先,x₁= 10,y₁= 500,x₂= 15,y₂= 300。
斜率=(300 500) /(15 10) =-40然后,x = 12,x₁= 10垂直变化量=-40 ×(12 10) =-80最后,y = 500 +(-80) = 420所以,当价格为 12 元时,估计销售量为 420 件。
内插法不仅在简单的线性关系中有用,在一些稍微复杂的情况中,比如曲线关系,也可以通过分段线性化等方法来应用内插法。
再比如,在金融领域,计算债券的到期收益率时,可能会用到内插法。
已知两个不同利率下债券的价格,要估算某个特定价格对应的利率,就可以借助内插法。
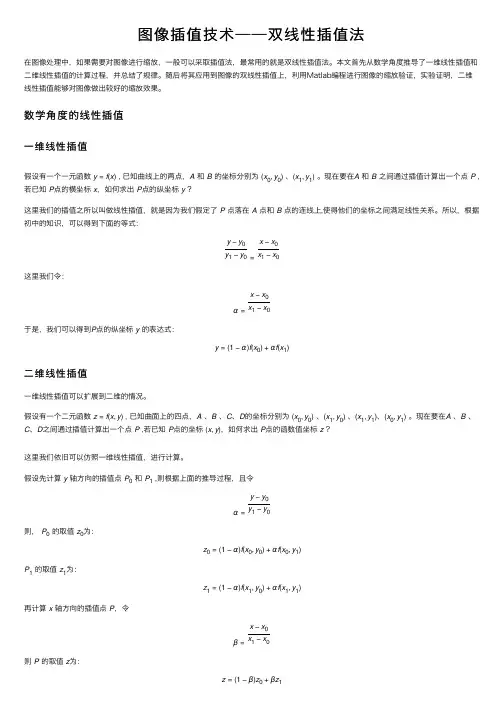
图像插值技术——双线性插值法在图像处理中,如果需要对图像进⾏缩放,⼀般可以采取插值法,最常⽤的就是双线性插值法。
本⽂⾸先从数学⾓度推导了⼀维线性插值和⼆维线性插值的计算过程,并总结了规律。
随后将其应⽤到图像的双线性插值上,利⽤Matlab编程进⾏图像的缩放验证,实验证明,⼆维线性插值能够对图像做出较好的缩放效果。
数学⾓度的线性插值⼀维线性插值假设有⼀个⼀元函数 y=f(x) , 已知曲线上的两点,A 和 B 的坐标分别为 (x0,y0) 、(x1,y1) 。
现在要在A 和 B 之间通过插值计算出⼀个点 P ,若已知 P点的横坐标 x,如何求出 P点的纵坐标 y ?这⾥我们的插值之所以叫做线性插值,就是因为我们假定了 P 点落在 A 点和 B 点的连线上,使得他们的坐标之间满⾜线性关系。
所以,根据初中的知识,可以得到下⾯的等式:y−y0 y1−y0=x−x0 x1−x0这⾥我们令:α=x−x0 x1−x0于是,我们可以得到P点的纵坐标 y 的表达式:y=(1−α)f(x0)+αf(x1)⼆维线性插值⼀维线性插值可以扩展到⼆维的情况。
假设有⼀个⼆元函数 z=f(x,y) , 已知曲⾯上的四点,A 、B 、C、D的坐标分别为 (x0,y0) 、(x1,y0) 、(x1,y1)、(x0,y1) 。
现在要在A 、B 、C、D之间通过插值计算出⼀个点 P ,若已知 P点的坐标 (x,y),如何求出 P点的函数值坐标 z ?这⾥我们依旧可以仿照⼀维线性插值,进⾏计算。
假设先计算 y 轴⽅向的插值点 P0 和 P1 ,则根据上⾯的推导过程,且令α=y−y0 y1−y0则, P0 的取值 z0为:z0=(1−α)f(x0,y0)+αf(x0,y1) P1 的取值 z1为:z1=(1−α)f(x1,y0)+αf(x1,y1)再计算 x 轴⽅向的插值点 P,令β=x−x0 x1−x0则 P 的取值 z为:z=(1−β)z0+βz1整理得到下⾯的式⼦:z =(1−β)(1−α)f x 0,y 0+αf x 0,y 1+β(1−α)f x 1,y 0+αf x 1,y 1=(1−β)(1−α)f x 0,y 0+(1−β)αf x 0,y 1+β(1−α)f x 1,y 0+βαf x 1,y 1⼩结由⼀维线性插值过渡到⼆维线性插值,我们发现,⼆者在表达式上有相似的规律:⼀维线性插值:y =f (x )α=x p −x 0x 1−x 0y p =(1−α)f x 0+αf x 1⼆维线性插值:z =f (x ,y )α=x p −x 0x 1−x 0,β=y p −y 0y 1−y 0z p =(1−β)(1−α)f x 0,y 0+(1−β)αf x 0,y 1+β(1−α)f x 1,y 0+βαf x 1,y 1图像中的双线性插值我们可以⽤函数来表⽰⼀幅图像(假设为单通道)。
遥感影像镶嵌方法(最新版4篇)篇1 目录1.遥感影像镶嵌方法的定义和重要性2.遥感影像镶嵌方法的分类3.常用的遥感影像镶嵌方法及其特点4.遥感影像镶嵌方法的应用案例5.遥感影像镶嵌方法的发展趋势篇1正文遥感影像镶嵌方法是指将多个遥感影像拼接在一起,形成一个更大范围、更高分辨率的遥感影像。
在遥感领域,镶嵌技术具有重要意义,因为它可以提高遥感数据的空间分辨率和时间分辨率,增强遥感数据的应用价值。
遥感影像镶嵌方法主要分为两类:线性镶嵌方法和非线性镶嵌方法。
线性镶嵌方法包括线性内插法、双线性内插法等,其特点是计算简单、易于实现,但可能引入误差。
非线性镶嵌方法包括非线性内插法、三次埃尔米特插值法等,其特点是可以减小误差,但计算复杂度较高。
常用的遥感影像镶嵌方法有以下几种:1.线性内插法:通过计算影像之间的线性关系,实现遥感影像的镶嵌。
此方法简单易行,但可能引入误差。
2.双线性内插法:在线性内插法的基础上,加入水平和垂直方向的插值,实现更高精度的遥感影像镶嵌。
3.非线性内插法:通过非线性方程组求解,实现遥感影像的镶嵌。
此方法可以减小误差,但计算复杂度较高。
4.三次埃尔米特插值法:利用三次埃尔米特插值函数,实现遥感影像的高精度镶嵌。
此方法具有较高的插值精度,但计算复杂度较高。
遥感影像镶嵌方法在多个领域有广泛应用,如地质勘探、环境监测、城市规划等。
例如,在地质勘探中,通过将多个遥感影像拼接在一起,可以形成高分辨率的地质构造图,为地质勘探提供重要依据。
随着遥感技术的发展,遥感影像镶嵌方法也在不断完善和优化。
未来的发展趋势包括提高镶嵌精度、简化计算过程、提高自动化程度等。
篇2 目录1.遥感影像镶嵌方法的定义2.遥感影像镶嵌方法的种类3.镶嵌方法的优缺点分析4.镶嵌方法在实际应用中的案例5.我国在遥感影像镶嵌方法的研究和应用现状篇2正文遥感影像镶嵌方法是指将多个遥感影像拼接在一起,形成一个大范围、高分辨率的遥感影像。
常用图像插值算法分析与比较摘要:插值算法在图像缩放处理中是一项基本且重要的问题。
插值算法有多种,最常用的有最近邻插值、双线性插值以及立方卷积插值。
本文对三种插值算法进行简单分析并对它们的处理结果加以比较,最后总结了三种算法各自的优缺点。
关键词:图像处理;最近邻插值;双线性插值;立方卷积插值1 引言图像几何变换包括平移、转置、镜像和缩放等。
其中前三种操作变换中,输出图像的每一个像素点在输入图像中都有一个具体的像素点与之对应。
但是,在缩放操作中,输出图像像素点坐标有可能对应于输入图像上几个像素点之间的位置,这个时候就需要通过灰度插值处理来计算出该输出点的灰度值[1]。
图像插值是图像超分辨处理的重要环节,不同的插值算法有不同的精度,插值算法的好坏也直接影响着图像的失真程度。
最常用的插值算法有三种:最近邻插值、双线性插值、立方卷积插值,其中使用立方卷积插值达到的效果是最佳的。
2 几种插值算法原理分析插值算法所应用的领域较多,对图像进行缩放处理是比较典型的应用,由于图像像素的灰度值是离散的, 因此一般的处理方法是对原来在整数点坐标上的像素值进行插值生成连续的曲面, 然后在插值曲面上重新采样以获得缩放图像像素的灰度值。
缩放处理从输出图像出发,采用逆向映射方法,即在输出图像中找到与之对应的输入图像中的某个或某几个像素,采用这种方法能够保证输出图像中的每个像素都有一个确定值,否则,如果从输入图像出发来推算输出图像,输出图像的像素点可能出现无灰度值的情况。
因为,对图像进行缩放处理时输出图像像素和输入图像之间可能不再存在着一一对应关系。
下面分别对三种算法予以介绍。
2.1 最近邻插值算法最简单的插值法是最近邻插值法,也叫零阶插值法[2]。
即选择离它所映射到的位置最近的输入像素的灰度值为插值结果。
对二维图像,是取待测样点周围4 个相邻像素点中距离最近1 个相邻点的灰度值作为待测样点的像素值。
若几何变换后输出图像上坐标为(x′,y′)的对应位置为(m,n),则示意图如下所示:2.2 双线性插值算法双线性插值又叫一阶插值法[3],它要经过三次插值才能获得最终结果,是对最近邻插值法的一种改进,先对两水平方向进行一阶线性插值,然后再在垂直方向上进行一阶线性插值。
ERDAS 影像融合方法汇总影像融合是指将多源信道所采集到的关于同一目标的影像数据经过影像处理和计算机技术等,最大限度的提取各自信道中的有利信息,最后综合成高质量的影像,以提高影像信息的利用率、改善计算机解译精度和可靠性、提升原始影像的空间分辨率和光谱分辨率,利于监测。
ERDAS IMAGINE 提供多种影像融合方法,且支持带RPC模型的影像融合处理。
1、(14个波段(蓝/像也为Step4: 利用低通滤波器(5×5)对多光谱影像进行滤波处理,输出多光谱滤波影像。
Step5: 利用相减法对全色锐化影像、全色滤波影像进行相减处理,并将全色锐化影像按照权重融合到多光谱滤波影像各个波段,输出新多光谱影像。
(2)参数说明Input Sensor Type 待融合影像传感器类型,分为Quickbird、IKONOS、Format三种传感器。
输入影像要求:多光谱和全色分辨率比为4:1、同时获取、为同一个传感器,全色为单波段,多光谱为4波段。
Sharpening Filter Center Value3×3锐化卷积窗口中心值,其他值都为-1,默认值根据传感器变化,范围值为11、14、17、20、23、1000,小的中心值会产生更好的锐化效果。
一般来说,大分辨率影像锐化程度要求低,小分辨率影像锐化程度要求高,若全色影像已经经过锐化处理,此处选择1000。
Pan Contribution Weight融合时全色图像所占的比重(权重),范围为0.7-1.3,默认值根据传感器变化,小的锐化值会产生更好的锐化效果。
Create image of subset area根据子区的坐标来定义融合影像范围。
Create image of full area输出所有区域的融合影像,这个范围是全色和多光谱影像的交集(intersect)。
该项勾选时才可设置融合影像成果名称和存放路径。
Null Value 设置输出图像空值的数值。
线性内插法计算公式
线性内插是假设在二个已知数据中的变化为线性关系,因此可由已知二点的坐标(a, b)去计算通过这二点的斜线。
其中a 函数值。
举个例子,已知x=1时y=3,x=3时y=9,那么x=2时用线性插值得到y就是3和9的算术平均数6。
写成公式就是:Y=Y1+(Y2-Y1)×(X-X1)/(X2-X1)
通俗地讲,线性内插法就是利用相似三角形的原理,来计算内插点的数据。
线性内插法
内插法又称插值法。
根据未知函数f(x)在某区间内若干点的函数值,作出在该若干点的函数值与f (x)值相等的特定函数来近似原函数f(x),进而可用此特定函数算出该区间内其他各点的原函数f(x)的近似值,这种方法,称为内插法。
按特定函数的性质分,有线性内插、非线性内插等;按引数(自变量)个数分,有单内插、双内插和三内插等。
线性内插法的基本计算过程是根据一组已知的未知函数自变量的值和它相对应的函数值,利用等比关系去求一种求未知函数其他值的近似计算方法,是一种求位置函数逼近数值的求解方法。
分类: 算法 数字图像处理中常用的插值方法
2010-11-15 14:05 在做数字图像处理时,经常会碰到小数象素坐标的取值问题,这时就需要依据邻近象如:做地图投影转换,对目标图像的一个象素进行坐标变换到源图像上对应的点时,数,再比如做图像的几何校正,也会碰到同样的问题。
以下是对常用的三种数字图像
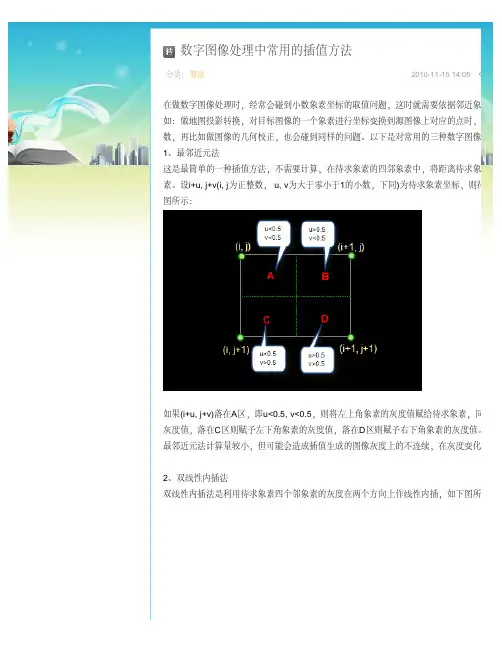
1、最邻近元法
这是最简单的一种插值方法,不需要计算,在待求象素的四邻象素中,将距离待求象
对于 (i, j+v),f(i, j) 到 f(i, j+1) 的灰度变化为线性关系,则有:
f(i, j+v) = [f(i, j+1) - f(i, j)] * v + f(i, j)
同理对于 (i+1, j+v) 则有:
f(i+1, j+v) = [f(i+1, j+1) - f(i+1, j)] * v + f(i+1, j)
从f(i, j+v) 到 f(i+1, j+v) 的灰度变化也为线性关系,由此可推导出待求象素灰度的计算 f(i+u, j+v) = (1-u) * (1-v) * f(i, j) + (1-u) * v * f(i, j+1) + u * (1-v) * f(i+1, j) 双线性内插法的计算比最邻近点法复杂,计算量较大,但没有灰度不连续的缺点,结性质,使高频分量受损,图像轮廓可能会有一点模糊。
3、三次内插法
该方法利用三次多项式S(x)求逼近理论上最佳插值函数sin(x)/x, 其数学表达式为:
待求像素(x, y)的灰度值由其周围16个灰度值加权内插得到,如下图:
待求像素的灰度计算式如下:f(x, y) = f(i+u, j+v) = ABC
其中:
三次曲线插值方法计算量较大,但插值后的图像效果最好。
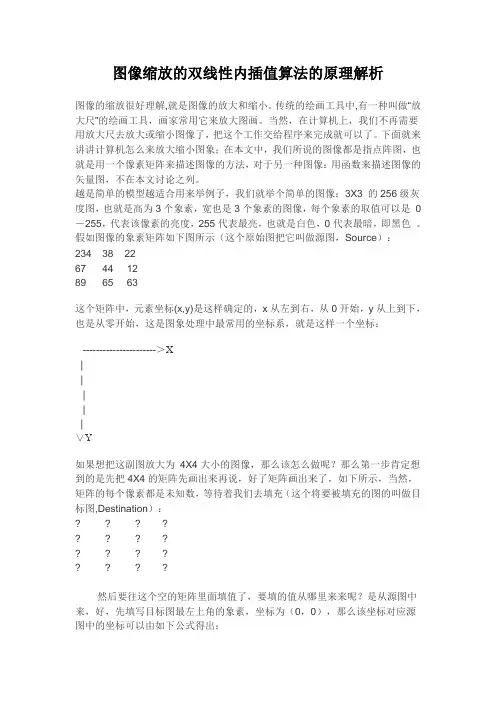
图像缩放的双线性内插值算法的原理解析图像的缩放很好理解,就是图像的放大和缩小。
传统的绘画工具中,有一种叫做“放大尺”的绘画工具,画家常用它来放大图画。
当然,在计算机上,我们不再需要用放大尺去放大或缩小图像了,把这个工作交给程序来完成就可以了。
下面就来讲讲计算机怎么来放大缩小图象;在本文中,我们所说的图像都是指点阵图,也就是用一个像素矩阵来描述图像的方法,对于另一种图像:用函数来描述图像的矢量图,不在本文讨论之列。
越是简单的模型越适合用来举例子,我们就举个简单的图像:3X3 的256级灰度图,也就是高为3个象素,宽也是3个象素的图像,每个象素的取值可以是0-255,代表该像素的亮度,255代表最亮,也就是白色,0代表最暗,即黑色。
假如图像的象素矩阵如下图所示(这个原始图把它叫做源图,Source):234 38 2267 44 1289 65 63这个矩阵中,元素坐标(x,y)是这样确定的,x从左到右,从0开始,y从上到下,也是从零开始,这是图象处理中最常用的坐标系,就是这样一个坐标:---------------------->X|||||∨Y如果想把这副图放大为4X4大小的图像,那么该怎么做呢?那么第一步肯定想到的是先把4X4的矩阵先画出来再说,好了矩阵画出来了,如下所示,当然,矩阵的每个像素都是未知数,等待着我们去填充(这个将要被填充的图的叫做目标图,Destination):? ? ? ?? ? ? ?? ? ? ?? ? ? ?然后要往这个空的矩阵里面填值了,要填的值从哪里来来呢?是从源图中来,好,先填写目标图最左上角的象素,坐标为(0,0),那么该坐标对应源图中的坐标可以由如下公式得出:srcX=dstX* (srcWidth/dstWidth) , srcY = dstY * (srcHeight/dstHeight)好了,套用公式,就可以找到对应的原图的坐标了(0*(3/4),0*(3/4))=>(0*0.75,0*0.75)=>(0,0),找到了源图的对应坐标,就可以把源图中坐标为(0,0)处的234象素值填进去目标图的(0,0)这个位置了。
双线性内插公式推导及在岩土工程中的应用
张理根
【期刊名称】《城市建筑》
【年(卷),期】2014(000)029
【摘要】双线性内插在地基沉降计算、标贯锤击数修正等岩土工程问题的查表求解过程中经常用到。
通常做法是:运用三次线性内插来实现。
文章推导出了双线性内插公式,在解决查表内插等类似问题时,代入相关数据后进行计算即可。
【总页数】2页(P207-207,212)
【作者】张理根
【作者单位】东莞市建青岩土检测有限公司,东莞523112
【正文语种】中文
【相关文献】
1.GM(1,1)模型背景值构造中参数n的公式推导及其应用 [J], 李凯;魏勇
2.地电成像法在岩土工程勘察中的应用——以西虎岭景区岩土工程勘察为例 [J], 李军;常利敏;邓小宁;李靖辉
3.基于双线性内插算法在水深断面测量中的应用 [J], 张伟;孙伯娜
4.张量分析中简化记法在公式推导中的应用及张量分量的计算 [J], 史姣;王正中;蔡坤
5.局部双线性内插法构建DEM数据模型在水土保持设计中的应用 [J], 杨雪峰;徐汉超;范鹏
因版权原因,仅展示原文概要,查看原文内容请购买。
三种插值算法最近邻插值法的双线性内插值:对于图像中一个目的像素,设置坐标通过反向变换得到的浮点坐标为(i+u,j+v,其中 i 、 j 均为非负整数, u 、 v 为 [0,1区间的浮点数,则这个像素得值f(i+u,j+v 可由原图像中坐标为 (i,j、 (i+1,j、 (i,j+1、 (i+1,j+1所对应的周围四个像素的值决定,即:f(i+u,j+v = (1-u(1-vf(i,j + (1-uvf(i,j+1 + u(1-vf(i+1,j + uvf(i+1,j+1其中 f(i,j表示源图像 (i,j处的的像素值,以此类推这就是双线性内插值法。
双线性内插值法计算量大,但缩放后图像质量高, 不会出现像素值不连续的的情况。
由于双线性插值具有低通滤波器的性质, 使高频分量受损,所以可能会使图像轮廓在一定程度上变得模糊插值的计算方法有很多, 比较常用的有最近像素插值算法、双线性插值算法、双三次插值算法和分形算法的四种。
其中, 最近像素插值算法是最简单的一种插值算法, 这种方法是当图片放大时, 缺少的像素通过直接使用与之最接近的原有像素的颜色生成, 也就是说照搬旁边的像素。
如图 1所示,当图片扩大时,要增加 X 点处的像素,由于 X 点与 A 、 B 这两个有效像素中的 B 点最接近,因此 X 点会直接照搬B 点的像素,从而使到 X 点生成的效果与 B 点一样。
虽然这种算法简单, 因此处理的速度很快, 但结果通常会产生明显可见的锯齿, 效果往往不佳。
双线性插值算法, 是指输出的图像的每个像素都是原图中四个像素运算的结果, 由于它是从原图四个像素中运算的, 因此这种算法很大程度上消除了锯齿现象, 而且效果也比较好。
双三次插值算法是双线性插值算法的改进算法,它输出图像的每个像素都是原图 16个像素运算的结果, 由于效果好, 运算速度也不慢, 因而这种插值方法是一种很常见的算法, 普遍用在图像编辑软件、打印机驱动和数码相机上。
三种插值算法最近邻插值法的双线性内插值:对于图像中一个目的像素,设置坐标通过反向变换得到的浮点坐标为(i+u,j+v,其中 i 、 j 均为非负整数, u 、 v 为 [0,1区间的浮点数,则这个像素得值f(i+u,j+v 可由原图像中坐标为 (i,j、 (i+1,j、 (i,j+1、 (i+1,j+1所对应的周围四个像素的值决定,即:f(i+u,j+v = (1-u(1-vf(i,j + (1-uvf(i,j+1 + u(1-vf(i+1,j + uvf(i+1,j+1其中 f(i,j表示源图像 (i,j处的的像素值,以此类推这就是双线性内插值法。
双线性内插值法计算量大,但缩放后图像质量高, 不会出现像素值不连续的的情况。
由于双线性插值具有低通滤波器的性质, 使高频分量受损,所以可能会使图像轮廓在一定程度上变得模糊插值的计算方法有很多, 比较常用的有最近像素插值算法、双线性插值算法、双三次插值算法和分形算法的四种。
其中, 最近像素插值算法是最简单的一种插值算法, 这种方法是当图片放大时, 缺少的像素通过直接使用与之最接近的原有像素的颜色生成, 也就是说照搬旁边的像素。
如图 1所示,当图片扩大时,要增加 X 点处的像素,由于 X 点与 A 、 B 这两个有效像素中的 B 点最接近,因此 X 点会直接照搬B 点的像素,从而使到 X 点生成的效果与 B 点一样。
虽然这种算法简单, 因此处理的速度很快, 但结果通常会产生明显可见的锯齿, 效果往往不佳。
双线性插值算法, 是指输出的图像的每个像素都是原图中四个像素运算的结果, 由于它是从原图四个像素中运算的, 因此这种算法很大程度上消除了锯齿现象, 而且效果也比较好。
双三次插值算法是双线性插值算法的改进算法,它输出图像的每个像素都是原图 16个像素运算的结果, 由于效果好, 运算速度也不慢, 因而这种插值方法是一种很常见的算法, 普遍用在图像编辑软件、打印机驱动和数码相机上。
线性内插法是指两个量之间如果存在线性关系,若A(X1,Y1),B(X2,Y2)为这条直
线上的两个点,已知另一点P 的Y0 值,那么利用他们的线性关系即可求得P 点的对应值X0。
通常应用的
是点P 位于点A、B 之间,故称“线性内插法”。
在求解X0 时,可以根据下面方程计算:
(X0- X1)/(X2 - X1)= (Y0- Y1)/(Y2 - Y1)。
在具体应用中,关键是要搞清楚6 个量X1,Y1,X2,Y2,X0,Y0 之间的关系。
(1)“内插法”的原理是根据等比关系建立一个方程,然后解方程计算得出所要求的数据。
(2)仔细观察方程会看出一个特点,即相对应的数据在等式两方的位置相同。
例如:X1 位于等式左方
表达式的分子和分母的右侧,与其对应的数字Y1 应位于等式右方的表达式的分子和分母的右侧。
(3)应该注意的是,如果对X1 和X2 的数值进行交换,则必须同时对Y1 和Y2 的数值也交换,否则,计
算结果一定不正确。
总的原则是直线上任意两点间的变量X 差值之比应等于对应的变量Y 的差值之比。
内插法在财务管理[2,3],投资决策[4- 6],古代历法[7]等领域都有广泛的应用.
举个例子,已知X1=1时Y1=3,X3=3时Y3=9,那么x=2时用线性插值得到y就是3和9的算术平均数6。
线性内插法公式线性内插法是用于在两个已知点之间插值的方法。
插值意味着对于给定的一些已知数据点,我们可以用这些点来预测在它们之间的值。
具体来说,假设我们有两个已知数据点(x0, y0) 和(x1, y1)。
如果我们想要预测在x0 和x1 之间的y 值,我们可以使用线性内插法。
线性内插法的公式如下:y = y0 + (x - x0) * [(y1 - y0) / (x1 - x0)]其中x 是我们想要预测的值的x 坐标,y0 和y1 是已知数据点的y 坐标,x0 和x1 是已知数据点的x 坐标。
线性内插法的原理是基于直线的斜率。
因为两个已知点之间的所有点都在一条直线上,所以我们可以使用斜率来预测这些点的y 值。
线性内插法最常用于插值一组数据,因为它是最简单的内插方法。
它的缺点是它只能用于直线上的点,因此对于更复杂的数据,它的精度可能不够高。
不过,线性内插法仍然是一种非常有用的工具,因为它可以在没有太多计算的情况下快速插值。
它也是其他更复杂的内插方法的基础。
例如,我们可以使用多项式内插法来插值一组数据,而多项式内插法可以用线性内插法来拟合其中的每一项。
此外,线性内插法还可以用于插值一组二维数据。
在这种情况下,我们可以使用线性内插法来插值每一维。
例如,我们可以使用线性内插法来插值x 和y 坐标,然后用插值的坐标来计算z 坐标。
总之,线性内插法是一种简单但强大的工具,可以用来在两个已知数据点之间插值。
它的原理基于直线的斜率,因此它最常用于插值一组数据。
尽管它只能用于直线上的点,但它仍然是一种有用的工具,可以在没有太多计算的情况下快速插值。
双线性内插值:对于一个目的像素,设置坐标通过反向变换得到的浮点坐标为(i+u,j+v),其中i、j均为非负整数,u、v为[0,1)区间的浮点数,则这个像素得值f(i+u,j+v) 可由原图像中坐标为(i,j)、(i+1,j)、(i,j+1)、(i+1,j+1)所对应的周围四个像素的值决定,即:f(i+u,j+v) = (1-u)(1-v)f(i,j) + (1-u)vf(i,j+1) + u(1-v)f(i+1,j) + uvf(i+1,j+1)其中f(i,j)表示源图像(i,j)处的的像素值,以此类推这就是双线性内插值法。
双线性内插值法计算量大,但缩放后图像质量高,不会出现像素值不连续的的情况。
由于双线性插值具有低通滤波器的性质,使高频分量受损,所以可能会使图像轮廓在一定程度上变得模糊三次卷积法能够克服以上两种算法的不足,计算精度高,但计算亮大,他考虑一个浮点坐标(i+u,j+v)周围的16个邻点,目的像素值f(i+u,j+v)可由如下插值公式得到:f(i+u,j+v) = [A] * [B] * [C][A]=[ S(u + 1)S(u + 0)S(u - 1)S(u - 2) ]┏f(i-1, j-1)f(i-1, j+0)f(i-1, j+1)f(i-1, j+2) ┓[B]=┃f(i+0, j-1)f(i+0, j+0)f(i+0, j+1)f(i+0, j+2) ┃┃f(i+1, j-1)f(i+1, j+0)f(i+1, j+1)f(i+1, j+2) ┃┗f(i+2, j-1)f(i+2, j+0)f(i+2, j+1)f(i+2, j+2) ┛┏S(v + 1) ┓[C]=┃S(v + 0) ┃┃S(v - 1) ┃┗S(v - 2) ┛┏1-2*Abs(x)^2+Abs(x)^3, 0<=Abs(x)<1S(x)={4-8*Abs(x)+5*Abs(x)^2-Abs(x)^3, 1<=Abs(x)<2┗0, Abs(x)>=2S(x)是对Sin(x*Pi)/x 的逼近(Pi是圆周率——π)最邻近插值(近邻取样法)、双线性内插值、三次卷积法等插值算法对于旋转变换、错切变换、一般线性变换和非线性变换都适用。