要求连杆在两个位置 垂直地面且相差180˚
给 定 的 设 计 条 件 : 1)几何条件(给定连架杆或连杆的位置) 2)运动条件(给定K) 3)动力条件(给定γmin) 设计方法:图解法、解析法、实验法
3. 用解析法设计四杆机构 思路:首先建立包含机构的各尺度参数和运动变量在 内的解析关系式,然后根据已知的运动变量求解所需 的机构尺度参数。
特例:等腰梯形机构-汽车转向机构
C’ B’
B
C
作者:潘存云教授
A
D
CC 电机
作者:潘存云教授
D
蜗轮 BBBA AA
蜗蜗杆杆
风扇座
D
A
作者:潘存云教授
EE
C
B
2.平面四杆机构的演化型式 (1) 改变构件的形状和运动尺寸
作者:潘存云教授
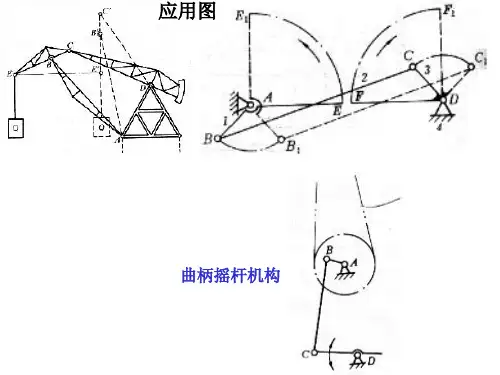
曲柄摇杆机构
曲柄滑块机构
↓∞ 偏心曲柄滑块机构
s =l sin φ
若∠B1C1D≤90°,则 γ1=∠B1C1D ∠B2C2D=arccos[b2+c2-(d+a)2]/2bc
若∠B2C2D>90°, 则 γ2=180°-∠B2C2D
γmin=[∠B1C1D, 180°-∠B2C2D]min
注:机构的传动角一般在运 动链最终一个从动件上度量。
B2 A
C2γ2 bγ1 c C1
(1)曲柄摇杆机构 共有三种基本型式:
特征:曲柄+摇杆
作用:将曲柄的整周回转转变为摇杆的往复摆动。 如雷达天线。
CC作者:潘存云教授 2 33
作者:潘存云教授
3
B1 4 D
A
雷达天线俯仰机构 曲柄主动
(2)双曲柄机构 特征:两个曲柄
3
2

![机械原理NO[1].11 第八章 平面连杆机构及其设计1](https://uimg.taocdn.com/160e5564376baf1ffd4fad1a.webp)