网络流算法专题
- 格式:ppt
- 大小:904.00 KB
- 文档页数:52
⽹络流算法2018-03-13 19:02:13在图论中,⽹络流(英语:Network flow)是指在⼀个每条边都有容量(capacity)的有向图分配流,使⼀条边的流量不会超过它的容量。
通常在运筹学中,有向图称为⽹络。
顶点称为节点(node)⽽边称为弧(arc)。
⼀道流必须匹配⼀个结点的进出的流量相同的限制,除⾮这是⼀个源点(source)──有较多向外的流,或是⼀个汇点(sink)──有较多向内的流。
⼀个⽹络可以⽤来模拟道路系统的交通量、管中的液体、电路中的电流或类似⼀些东西在⼀个结点的⽹络中游动的任何事物。
⼀、最⼤流最⼩割定理最⼤流最⼩割定理提供了对于⼀个⽹络流,从源点到⽬标点的最⼤的流量等于最⼩割的每⼀条边的和。
这个定理说明,当⽹络达到最⼤流时,会有⼀个割集,这个割集中的所有边都达到饱和状态。
这等价于在⽹络中再也找不到⼀个从s到t的增⼴路径。
因为只要能找到⼀条增⼴路径,这条增⼴路径肯定要经过最⼩割集中的⼀条边,否则这个割集就不能称之为割集了。
既然这个割集中所有的边都饱和了,因此也就不会存在这样的增⼴路径了。
这个定理的意义在于给我们指明了⽅向:任何算法,只要最后能达到“再也找不到⼀条增⼴路径”,就可以说明这个算法最后达到了最⼤流。
⼆、最⼤流问题在优化理论中,最⼤流问题涉及到在⼀个单源点、单汇点的⽹络流中找到⼀条最⼤的流。
最⼤流问题可以被看作是⼀个更复杂的⽹络流问题(如循环问题(circulation problem))的特殊情况,。
s-t流(从源点s到汇点t)的最⼤值等于s-t割的最⼩容量,这被称为最⼤流最⼩割定理。
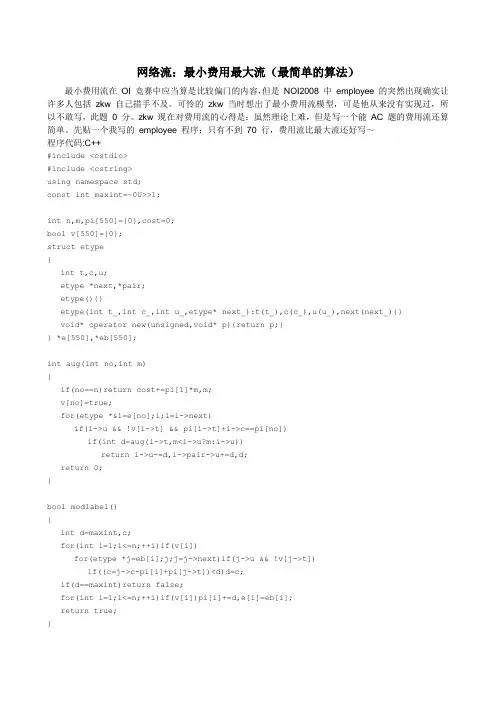
下⾯举例来说明这个问题:问题描述:给定⼀个有向图G=(V,E),把图中的边看作管道,每条边上有⼀个权值,表⽰该管道的流量上限。
给定源点s和汇点t,现在假设在s处有⼀个⽔源,t处有⼀个蓄⽔池,问从s到t的最⼤⽔流量是多少。
这个问题有如下的⼀些限制:容量限制:也就是在每条通路上的流量都不能超过其capacity。
最大流算法研究FordFulkerson和EdmondsKarp算法最大流算法是图论中一个重要的概念和研究领域,它用于解决网络流问题。
在最大流问题中,我们需要找到从源节点到汇节点的最大流量,以便在网络中实现最优的数据传输。
本文将研究两种经典的最大流算法:FordFulkerson算法和EdmondsKarp算法。
1. FordFulkerson算法FordFulkerson算法是由L.R.Ford Jr.和D.R.Fulkerson于1956年提出的经典算法。
该算法基于贪心思想,通过不断寻找增广路径来逐步增加流量,直到达到最大流。
算法步骤如下:1.1 初始化网络中的流量为0。
1.2 找到一条从源节点到汇节点的增广路径。
1.3 计算增广路径上的最小容量。
1.4 将最小容量加到网络中的流量上,并更新相关边的残余容量。
1.5 重复步骤2和步骤3,直到无法找到增广路径。
FordFulkerson算法的核心思想是不断寻找增广路径,并在每次找到增广路径时增加流量,直到无法找到增广路径为止。
该算法的时间复杂度取决于增广路径的数量和最大容量的大小,最坏情况下可以达到O(E|f*|),其中E是网络中的边数,|f*|是最大流的大小。
2. EdmondsKarp算法EdmondsKarp算法是FordFulkerson算法的一个改进版本,由J.Edmonds和R.Karp于1972年提出。
该算法利用广度优先搜索来寻找增广路径,从而减少了搜索路径的数量,提高了算法的效率。
算法步骤如下:2.1 初始化网络中的流量为0。
2.2 使用广度优先搜索来寻找从源节点到汇节点的最短增广路径。
2.3 计算增广路径上的最小容量。
2.4 将最小容量加到网络中的流量上,并更新相关边的残余容量。
2.5 重复步骤2和步骤3,直到无法找到增广路径。
EdmondsKarp算法的核心思想是利用广度优先搜索来寻找增广路径,从而减少搜索路径的数量,提高算法的效率。

网络流:最小费用最大流(最简单的算法)最小费用流在OI 竞赛中应当算是比较偏门的内容,但是NOI2008 中employee 的突然出现确实让许多人包括zkw 自己措手不及。
可怜的zkw 当时想出了最小费用流模型,可是他从来没有实现过,所以不敢写,此题0 分。
zkw 现在对费用流的心得是:虽然理论上难,但是写一个能AC 题的费用流还算简单。
先贴一个我写的employee 程序:只有不到70 行,费用流比最大流还好写~程序代码:C++#include <cstdio>#include <cstring>using namespace std;const int maxint=~0U>>1;int n,m,pi[550]={0},cost=0;bool v[550]={0};struct etype{int t,c,u;etype *next,*pair;etype(){}etype(int t_,int c_,int u_,etype* next_):t(t_),c(c_),u(u_),next(next_){}void* operator new(unsigned,void* p){return p;}} *e[550],*eb[550];int aug(int no,int m){if(no==n)return cost+=pi[1]*m,m;v[no]=true;for(etype *&i=e[no];i;i=i->next)if(i->u && !v[i->t] && pi[i->t]+i->c==pi[no])if(int d=aug(i->t,m<i->u?m:i->u))return i->u-=d,i->pair->u+=d,d;return 0;}bool modlabel(){int d=maxint,c;for(int i=1;i<=n;++i)if(v[i])for(etype *j=eb[i];j;j=j->next)if(j->u && !v[j->t])if((c=j->c-pi[i]+pi[j->t])<d)d=c;if(d==maxint)return false;for(int i=1;i<=n;++i)if(v[i])pi[i]+=d,e[i]=eb[i];return true;}int main(){freopen("costflow.in","r",stdin);freopen("costflow.out","w",stdout);scanf("%d %d",&n,&m);etype *Pe=new etype[m+m];while(m--){int s,t,c,u;scanf("%d%d%d%d",&s,&t,&u,&c);e[s]=new(Pe++)etype(t, c,u,e[s]);e[t]=new(Pe++)etype(s,-c,0,e[t]);e[s]->pair=e[t];e[t]->pair=e[s];}memmove(eb,e,sizeof(e));do do memset(v,0,sizeof(v));while(aug(1,maxint));while(modlabel());printf("%d\n",cost);return 0;}程序代码:CB大牛翻译的PASCALvarn,m,i,l,s,t,c,cost,u:longint;v:array[0..600]of boolean;dis:array[0..600]of longint;e_n,e_t,e_c,e_u,e_p,e_x:array[0..250000]of longint;function min(a,b:longint):longint;beginif a>b then exit(b);exit(a);end;procedure addedge(s,t,c,u,k:longint);begininc(l);e_n[l]:=e_n[s];e_n[s]:=l;//下一条边e_t[l]:=t;//边的另一端e_c[l]:=c;//边的费用e_u[l]:=u;//边的容量e_p[l]:=l+k;//对应的边end;procedure build(s,t,c,u:longint);beginaddedge(s,t,c,u,1);addedge(t,s,-c,0,-1);end;function aug(no,m:longint):longint;vari,d:longint;beginif no=n then begininc(cost,m*dis[1]);exit(m);end;v[no]:=true;i:=e_x[no];while i<>0 do beginif (e_u[i]>0)and(not v[e_t[i]])and(dis[e_t[i]]+e_c[i]=dis[no]) then begind:=aug(e_t[i],min(m,e_u[i]));if d>0 then begindec(e_u[i],d);inc(e_u[e_p[i]],d);e_x[no]:=i;exit(d);end;end;i:=e_n[i];end;e_x[no]:=i;exit(0);end;function modlabel:boolean;vard,i,j:longint;begind:=maxlongint;for i:=1 to n do if v[i] then beginj:=e_n[i];while j<>0 do beginif (e_u[j]>0)and(not v[e_t[j]])and(e_c[j]-dis[i]+dis[e_t[j]]<d) then d:=e_c[j]-dis[i]+dis[e_t[j]];j:=e_n[j];end;end;if d=maxlongint then exit(true);for i:=1 to n do if v[i] then beginv[i]:=false;inc(dis[i],d);end;exit(false);end;beginassign(input,'coflow.in');reset(input);assign(output,'coflow.out');rewrite(output);readln(n,m);l:=n;for m:=m downto 1 do beginreadln(s,t,u,c);build(s,t,c,u);end;repeatfor i:=1 to n do e_x[i]:=e_n[i];while aug(1,maxlongint)>0 do fillchar(v,sizeof(v),0);until modlabel;writeln(cost);close(output);end.这里使用的是连续最短路算法。

⽹络流ISAP算法的简单介绍(zz) 这⼏天由于种种原因经常接触到⽹络流的题⽬,这⼀类型的题给⼈的感觉,就是要⾮常使劲的YY才能出来点⽐较正常的模型。
尤其是看了Amber最⼩割应⽤的⽂章,⾥⾯的题⽬思路真是充满了绵绵不绝的YD思想。
然⽽⽐赛中,当你YD到了这⼀层后,您不得不花⽐较多的时间去纠结于⼤量细节的实现,⽽冗长的代码难免会使敲错版后的调试显得异常悲伤,因此⼀些巧妙简短⾼效的⽹络流算法在此时便显得犹为重要了。
本⽂⼒求以最简短的描述,对⽐较流⾏的⽹络流算法作⼀定的总结,并借之向读者强烈推荐⼀种效率与编程复杂度相适应的算法。
众所周知,在⽹络流的世界⾥,存在2类截然不同的求解思想,就是⽐较著名的预流推进与增⼴路,两者都需要反向边的⼩技巧。
其中预流推进的算法思想是以边为单元进⾏推流操作。
具体流程如下:置初始点邻接边满流并⽤⼀次反向bfs对每个结点计算反向距离标号,定义除汇点外存量⼤于出量的结点为活动结点,每次对活动结点按允许边(u->v:d[u]=d[v]+1)进⾏推流操作,直到⽆法推流或者该点存量为0,若u点此时仍为活动结点,则进⾏重标号,使之等于原图中进⾏推操作后的邻接结点的最⼩标号+1,并将u点⼊队。
当队列为空时,算法结束,只有s点和t点存量⾮0,⽹络中各顶点⽆存量,⽆法找到增⼴路继续增⼴,则t点存量为最⼤流。
⽽增⼴路的思想在于每次从源点搜索出⼀条前往汇点的增⼴路,并改变路上的边权,直到⽆法再进⾏增⼴,此时汇点的增⼴量即为最⼤流。
两者最后的理论基础依然是增⼴路定理,⽽在理论复杂度上预流推进要显得⽐较优秀。
其中的HLPP⾼标预流推进的理论复杂度已经达到了另⼈发指的O(sqrt(m)*n*n),但是其编程复杂度也是同样的令⼈发指- - 于是我们能否在编程复杂度和算法复杂度上找到⼀个平衡呢,答案是肯定的。
我们使⽤增⼴路的思想,⽽且必须进⾏优化。
因为原始的增⼴路算法(例如EK)是⾮常悲剧的。
基于网络流的路径规划算法研究一、引言路径规划是计算机科学领域中的一个重要研究方向,其目的是找到从一个起点到终点的最佳路径。
在现实生活中,路径规划在许多领域都有广泛应用,如交通导航、物流配送、机器人导航等。
网络流算法是一种常用于解决路径规划问题的方法,其基本思想是将路径规划问题转化为网络中最大流或最小割问题。
本文将从网络流算法的原理、应用和改进等方面进行深入研究。
二、网络流算法原理1.1 最大流问题最大流问题是一种经典的优化问题,在给定一个有向图和两个节点s和t时,其目标是找到从s到t的最大流量。
常用解决最大流问题的方法有Ford-Fulkerson算法和Edmonds-Karp算法。
Ford-Fulkerson算法通过不断寻找增广路径来增加当前流量,直到无法找到增广路径为止。
Edmonds-Karp算法在Ford-Fulkerson基础上进行了改进,使用BFS寻找增广路径,使得时间复杂度更低。
1.2 最小割问题最小割问题与最大流问题相对应,在给定一个有向图和两个节点s和t时,其目标是找到一个割集,使得割集中的节点可以通过流量的传递到达t,且割集的容量最小。
最小割问题可以通过最大流问题来解决,即找到最大流后,将图中所有边的容量减去其流量得到的边即为最小割。
三、网络流算法应用2.1 交通导航交通导航是路径规划应用中常见的场景之一。
通过将道路网络抽象为有向图,交通导航系统可以根据实时路况信息和用户目标位置,利用网络流算法求解出最短路径或者时间最短路径。
在实际应用中,还需要考虑一些约束条件如道路限速、拥堵情况等。
2.2 物流配送物流配送是另一个重要领域,在物资配送过程中需要考虑如何规划路径以减少时间和成本。
利用网络流算法可以将物资配送过程抽象为有向图,并根据货物数量、距离等因素求解出最优路径以实现高效配送。
2.3 机器人导航机器人导航是人工智能领域研究的热点之一,在机器人行走过程中需要规划路径以避开障碍物。
![[学习笔记]网络最大流的HLPP算法](https://uimg.taocdn.com/a3ca72024b7302768e9951e79b89680203d86b1c.webp)
[学习笔记]⽹络最⼤流的HLPP算法#define u的伴点集合与u相隔⼀条边的且u能达到的点的集合0x00~ {}~PrefaceHLPP(Highest~Label~Preflow~Push)最⾼标签预流推进算法是处理⽹络最⼤流⾥两种常⽤⽅法——增⼴路&预流推进中,预流推进算法的⼀种。
据传由tarjan发明怎么⼜是他,并被其他科学家证明了其复杂度是紧却的O(n^2\sqrt m)。
在随机数据中不逊⾊于普通的增⼴路算法,⽽在精⼼构造的数据中⽆法被卡,所以是⼀种可以替代Dinic的⽅法(随我怎么说,代码⼜长⼜难调,所以还是Dinic好啊\rm{TAT})但⽆论怎样,wiki⾥⾯已经承认HLPP是现在最优秀的⽹络流算法了。
那么预流推进这个⼤门类⾥⾯,思想都差不多。
⼤抵上就是我们对每个点记录超额流(Extra~Flow) ,即允许流在⾮源点暂时存储,并伺机将超额流推送出去。
不可推送的,就会流回源点。
那么最终答案显然存储在Extra[T]⾥⾯。
但同时这也有⼀个问题,就是会出现两个点相互推送不停的情况。
为了防⽌这样,我们采⽤最⾼标号的策略,给每个点⼀个⾼度,对于⼀个点u以及它的伴点集合\{v\},当且仅当h_u = h_v + 1时才可以推送流。
并且我们对于源点S,设置h_S = N,并对于S实⾏⽆限制推送。
那么最后的答案就保存在Extra[T]⾥⾯。
但有时,我们发现有个点是”⾕“,即周围点的⾼度都⽐它⾼,但是它有超额流。
那么我们此时考虑拔⾼它的⾼度,即重贴标签(relabel)操作。
0x01\quad初步的算法流程以下我们⽤Extra_u表⽰u的超额流,h_u表⽰u的⾼度,⽤f_k表⽰边k的容量。
⾸先把所有的h_i都置为零,并把h_s置为N(点数)。
将S的流推送到每个与S相邻的点,同时把他们加⼊⼀个以⾼度为键值得⼤根堆,所以每次取出的应该是⾼度最⾼的、且超额流不为零的点,并执⾏推送操作。
对于点u推送过程中,如果Extra_u减到了0,就⽴即退出(优化⼀)对于每条出边k,推送的流量F = min(f_k,Extra_u)并执⾏两个点(u,v)的超额流增减。
网络流基本概念在实际生活中有许多流量问题,例如在交通运输网络中的人流、车流、货物流,供水网络中的水流,金融系统中的现金流,通讯系统中的信息流,等等。
50年代以福特(Ford)、富克逊(Fulkerson)为代表建立的“网络流理论”,是网络应用的重要组成部分。
在最近的奥林匹克信息学竞赛中,利用网络流算法高效地解决问题已不是什么稀罕的事了。
本节着重介绍最大流(包括最小费用)算法,并通过实际例子,讨论如何在问题的原型上建立—个网络流模型,然后用最大流算法高效地解决问题。
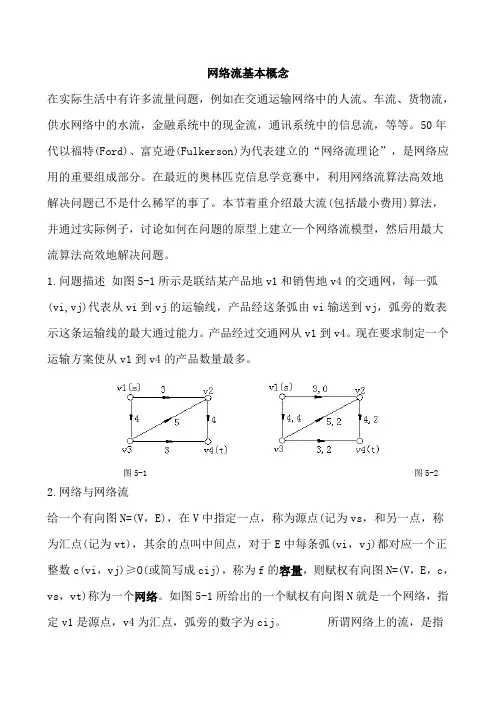
1.问题描述如图5-1所示是联结某产品地v1和销售地v4的交通网,每一弧(vi,vj)代表从vi到vj的运输线,产品经这条弧由vi输送到vj,弧旁的数表示这条运输线的最大通过能力。
产品经过交通网从v1到v4。
现在要求制定一个运输方案使从v1到v4的产品数量最多。
图5-1 图5-2 2.网络与网络流给一个有向图N=(V,E),在V中指定一点,称为源点(记为vs,和另一点,称为汇点(记为vt),其余的点叫中间点,对于E中每条弧(vi,vj)都对应一个正整数c(vi,vj)≥O(或简写成cij),称为f的容量,则赋权有向图N=(V,E,c,vs,vt)称为一个网络。
如图5-1所给出的一个赋权有向图N就是一个网络,指定v1是源点,v4为汇点,弧旁的数字为cij。
所谓网络上的流,是指定义在弧集合E上一个函数f={f(vi,vj)},并称f(vi,vj)为弧(vi,vj)上的流量(下面简记为fij)。
如图5-2所示的网络N,弧上两个数,第一个数表示容量cij,第二个数表示流量fij。
3.可行流与最大流在运输网络的实际问题中,我们可以看出,对于流有两个显然的要求:一是每个弧上的流量不能超过该弧的最大通过能力(即弧的容量);二是中间点的流量为0,源点的净流出量和汇点的净流入量必相等且为这个方案的总输送量。
因此有:(1)容量约束:0≤f ij≤c ij,(v i,v j)∈E,(2)守恒条件对于中间点:流入量=流出量;对于源点与汇点:源点的净流出量v s(f)=汇点的净流入量(-v t(f))的流f,称为网络N上的可行流,并将源点s的净流量称为流f的流值v(f)。
ISAP⽹络流算法 ISAP全称Improved Shortest Augmenting Path,意指在SAP算法进⾏优化。
SAP即Edmonds-Karp算法,其具体思路是通过不断向残存⽹络推送流量来计算整个⽹络的最⼤流。
阅读本⽂要求掌握⽹络流的基础概念,不懂的出门左拐算法导论。
ISAP的时间复杂度与EK算法⼀致,⽽EK算法的时间复杂度为min(O(E|f|),O(VE^2)),其中O(E|f|)部分是因为其是在FORD-FULKERSON算法上的改进。
EK算法在FF算法的基础上将随意取增⼴路径替换为取最短增⼴路径,⽽ISAP在EK算法的基础上剔除了除了第⼀次外的后续⼴度优先搜索寻找最短路径的部分。
下⾯对ISAP算法进⾏说明。
先说明⼀些名词,称残存⽹络中容量⾮0的边为有效边。
我们⾸先在EK算法的基础上,为每个顶点添加新的属性d,表⽰其到汇点t的最短路径(路径只能包含有效边),这个最短路径是基于残存⽹络的,⽽⾮原图,因此d属性会随着流的推送导致残存⽹络的变更⽽变更。
显然要维护这样⼀个属性d,每次在推送流后,都需要基于新形成的残存⽹络重新执⾏⼴度优先搜索算法,以计算每个顶点正确的d属性,这样不就与EK算法完全⼀样了吗?是的,因此为了避免每次流推送都必须重新计算最短路径,我们需要修改d的定义,d表⽰顶点到t的距离的某个下界。
为了说明这样定义之后就不⽤再每次重新执⾏⼴度优先搜索算法计算d,只需要说明每次向残存⽹络推送流,只会导致每个顶点到t的距离⾮严格递增: 证明:假设我们向图G沿最短路径推送流,并形成新图G'。
我们记R(a,b)表⽰原图中从点a到点b的最短距离,记R'(a,b)表⽰在新图(残存⽹络)中a到b的最短距离。
我们所要证明的就是对于任意点x都有R(x,t)<=R'(x,t)。
假设存在点x,满⾜R(x,t)>R'(x,t),显然x到t的最短路径之中必然包含由于流推送⽽新增的边,假设(v,u)是图G'中x到t中距离点x最近的新增边,⽽(u,v)是处于G中最短增⼴路径上。
⽹络流24题题解⽹络流24题by ctldragon到⽬前为⽌,还有数字梯形问题和机器⼈路径规划问题未完成。
⽹络流24题主要考建模,算法都不难(餐⼱计划问题显然要拆点,把⼀天拆成早上和晚上。
源点 s 向每天晚上连⼀条容量为所需餐⼱数,费⽤为 0 的边,表⽰获得脏餐⼱。
每天早上向汇点 t 连⼀条容量为所需餐⼱数,费⽤为 0 的边,表⽰提供⼲净餐⼱。
每天晚上可以向第⼆天晚上连⼀条容量为 inf ,费⽤为 0 的边,表⽰将脏餐⼱留在第⼆天。
i −m 天向 i 天连⼀条容量为 inf ,费⽤为 f 的边,表⽰快洗。
i −n 天向 i 天连⼀条容量为 inf ,费⽤为 s 的边,表⽰快洗。
然后就愉快的跑最⼩费⽤最⼤流了。
远古代码:by ctldragon s 0t 0inf 0i −m i inf f i −n i inf s #include<bits/stdc++.h>#define re register#define int long longusing namespace std;const int inf=0x3f3f3f3f;int n;int p,ft,fcost,st,scost;int s,t;struct node{int v,nxt,flow,dis;}a[1000000];int head[20000],cnt=1;void add(int u,int v,int flow,int dis){a[++cnt].v=v;a[cnt].flow=flow;a[cnt].dis=dis;a[cnt].nxt=head[u];head[u]=cnt;}int dis[20000],pre[20000];bool vis[20000];bool SPFA(){queue<int>q;memset(vis,false,sizeof vis);memset(pre,0,sizeof pre);while(!q.empty())q.pop();for(re int i=0;i<=2*n+1;i++)dis[i]=inf;dis[s]=0;vis[s]=true;q.push(s);while(!q.empty()){int u=q.front();q.pop();vis[u]=false;for(re int i=head[u];i;i=a[i].nxt){int v=a[i].v;if(!a[i].flow)continue;if(dis[v]>dis[u]+a[i].dis){dis[v]=dis[u]+a[i].dis,pre[v]=i;if(!vis[v])vis[v]=true,q.push(v);}}}if(dis[t]==inf)return 0;return 1;Processing math: 44%n 个⽉之前的代码了,码风极其奇怪/kk家园 / 星际转移问题⾸先并查集判断⼀下地球和⽉球是否连起来,没连起来就是⽆解。
网络流算法(NetworkFlow)网络流算法,是指寻找网络流问题的解的算法,它是一类重要的组合优化问题,被广泛应用于计算机科学及工程领域。
网络流是个有向图,它模拟了许多实际问题,如输电方案、货物运输、油管输送和信息传输等。
网络流算法的目的是在给定的网络流中,尽可能地将流量从源点流向汇点,同时满足各个节点的容量约束和流量平衡约束。
本文将介绍网络流模型的构建和基本算法。
一、网络流模型的构建网络流模型是一个有向图G=(V,E),其中V表示节点集合,E表示边集合。
每条边都有一个容量c(e)表示其流量的最大值。
设源点为s,汇点为t,则网络流模型可以表示为一个三元组(N,s,t),即:N=(V,E) s∈V t∈V s≠t在网络流模型中,源点始终是起点,汇点始终是终点。
我们在模型中引入一个源汇节点s'和汇源节点t',并连接源点和汇点,得到源汇图G'=(V,E'),其中:E'=E∪{(s',s,c(s,t))}∪{(t,t',c(s,t))}即,在原图的基础上,加入两个新的虚拟节点s'和t',并连接到源点和汇点。
这样构造的网络流模型中,所有的节点都满足容量和流量平衡约束。
在网络流问题中,我们需要求解最大流或最小割,以满足约束条件,并且尽可能地提高网络的利用率。
二、网络流的基本概念和算法1. 流量和容量网络流图中,首先需要确定每条边的容量和流量。
流量指的是通过该边的流量大小,容量指的是该边能够承受的最大流量。
在网络流模型中,每条边的容量是一个正实数,而流量可以是任意实数。
流量和容量通常表示为f(e)和c(e)。
2. 割在网络流模型中,割是一种对源汇图做出的划分,其中源点s和汇点t被分为两个集合S和T。
网络流通过割的概念来定义障碍物,即对流量的限制。
在网络流图中,割C(S,T)是指将源点s和汇点t割成两部分的划分,C(S,T)满足:s∈S t∈T S∩T=∅根据割的定义,可将所有割分为最小割和最大割。
概述:最短增广路算法(Shortest Augmenting Path Algorithm),即每次寻找包含弧的个数最少的增广路进行增广,可以证明,此算法最多只需要进行mn/2次增广。
并且引入距离标号的概念,可以在O(n)的时间里找到一条最短增广路。
最终的时间复杂度为O(n^2m),但在实践中,时间复杂度远远小于理论值(特别是加了优化之后),因此还是很实用的。
1)距离标号:对于每个顶点i赋予一个非负整数值dis(i)来描述i到t的“距离”远近。
初始化的时候,所有的顶点的dis[i]的值均为0;2)允许弧和允许路:如果残留网络G中的一条弧(i,j)满足dis(i)=dis(j)+1,我们称(i,j)是允许弧,由允许弧组成的一条s-t路径是允许路。
显然,允许路是残留网络G中的一条最短增广路。
当找不到允许路的时候,我们需要修改某些点的dis(i)。
eg:增光路径:src->2->sink(以下的说明只用这三个顶点说明如果找到增广路)1:dis[src]=0; 没有增广路径修改dis[src]=1;2:dis[src]=1; dis[src]=dis[2]+1; dis[2]=0,没有增广路径,修改:dis[2]=1;3: dis[src]=1; 接着在修改的值dis[src]=dis[2]+1=2;4:这样就找到例子的增广路径了:src->2->sink;dis:2 1 0 (严格按照允许弧的定义)特别说明:你只需要知道这条路径是怎样找出来的时候就可以了,具体如何实现我在后面将用结合代码图片讲解。
3)Gap优化:(这个数组的作用判断残留网络来还有没有增广路径,相当于搜索的剪枝)Gap[x]=y:说明残留网络中dis[i]=x的个数为y,一样好好理解这句话,不然后面的好难看懂我们可以注意到由于残留网络的修改只会使dis(i)越来越大(因为修改前dis(i)<dis(j)+1,而修改后会存在dis(i)=dis(j)+1,因此变大了),所以说dis(i)是单调递增的,这就提示我们,如果dis函数出现了“断层”,即没有dis(i)=k,而有dis(i)=k±1,这时候必定无法再找到增广路径。
网络流算法介绍与分析网络流问题可以用于解决很多实际中的应用问题,比如交通流量优化、航空航线规划、电力网络规划等。
因此,网络流算法在实际应用中具有重要的意义。
最常用的最大流算法是Ford-Fulkerson算法,它基于增广路径的思想,通过不断寻找增广路径来增加流量,直至无法找到增广路径为止。
Ford-Fulkerson算法的时间复杂度为O(Ef),其中E是图中边的数量,f是最大流的流量。
Ford-Fulkerson算法还有一个重要的改进算法,即Edmonds-Karp算法。
Edmonds-Karp算法在Ford-Fulkerson算法的基础上加入了BFS遍历,以保证每次选择的增广路径是最短的路径。
这样可以保证算法的时间复杂度为O(V*E^2),其中V是图中顶点的数量,E是图中边的数量。
另一个重要的最大流算法是Dinic算法,它基于层次图和分层网络的概念,通过构建分层网络并使用DFS遍历的方式来寻找增广路径。
Dinic算法的时间复杂度为O(V^2*E),其中V是图中顶点的数量,E是图中边的数量。
Dinic算法比Edmonds-Karp算法效率更高。
最小割算法主要包括Ford-Fulkerson算法和Stoer-Wagner算法。
Ford-Fulkerson算法可以利用网络中的最大流来求解最小割问题,它的时间复杂度和最大流算法一样。
Stoer-Wagner算法是一个基于图的割的概念的算法,通过不断选择割最小的边来合并两个顶点集合,直至整个图只剩下一个顶点。
Stoer-Wagner算法的时间复杂度为O(V^3),其中V是图中顶点的数量。
以上介绍的只是网络流算法中的几个典型算法,实际上还有很多其他的网络流算法,比如Push-Relabel算法、Capacity Scaling算法等。
这些算法各自有其适用的场景和特点,可以根据具体的问题选择合适的算法。
总的来说,网络流算法是一类非常强大的图论算法,可以应用于各种实际问题的求解。
三种⽹络流(最⼤流)的实现算法讲解与代码[洛⾕P3376题解]⽹络流(最⼤流)的实现算法讲解与代码定义对于给定的⼀个⽹络,有向图中每个的边权表⽰可以通过的最⼤流量。
假设出发点S⽔流⽆限⼤,求⽔流到终点T后的最⼤流量。
起点我们⼀般称为源点,终点⼀般称为汇点内容前置1.增⼴路在⼀个⽹络从源点S到汇点T的⼀条各边剩余流量都⼤于0(还能让⽔流通过,没有堵住)的⼀条路。
2.分层预处理出源点到每个点的距离(每次寻找增⼴路都要,因为以前原本能⾛的路可能因为⽔灌满了,导致不能⾛了).作⽤是保证只往更远的地⽅放⽔,避免兜圈⼦或者是没事就⾛回头路(正所谓⼈往⾼处⾛⽔往低处流).3.当前弧优化每次增⼴⼀条路后可以看做“榨⼲”了这条路,既然榨⼲了就没有再增⼴的可能了。
但如果每次都扫描这些“枯萎的”边是很浪费时间的。
那我们就记录⼀下“榨取”到那条边了,然后下⼀次直接从这条边开始增⼴,就可以节省⼤量的时间。
这就是当前弧优化具体怎么实现呢,先把链式前向星的head数组复制⼀份,存进cur数组,然后在cur数组中每次记录“榨取”到哪条边了。
[#3 引⽤⾃]()解决算法Ford-Fulkerson 算法(以下简称FF算法)FF算法的核⼼是找增⼴路,直到找不到为⽌。
(就是⼀个搜索,⽤尽可能多的⽔流填充每⼀个点,直到没有⽔⽤来填充,或者没有多余的节点让⽔流出去)。
但是这样的⽅法有点基于贪⼼的算法,找到反例是显⽽易见的,不⼀定可以得到正解。
为了解决这种问题,我们需要⼀个可以吃后悔药的⽅法——加反向边。
原本我们的DFS是⼀条路⾛到⿊的,现在我们每次进⼊⼀个节点,把⽔流送进去,同时建⽴⼀个权值与我们送⼊的⽔流量相等,但是⽅向相反的路(挖⼀条路让⽔流能够反向流回来,相当于给⽔流吃⼀颗后悔药)。
我们给了FF算法⼀颗后悔药之后就可以让他能够找到正确的最⼤流。
Ford-Fulkerson算法的复杂度为O(e×f) ,其中 e 为边数, f为最⼤流上代码。
图论与网络流算法一、课程目标知识目标:1. 让学生掌握图的基本概念,包括图的表示方法、顶点与边的性质;2. 使学生理解图论中的关键算法,如最短路径、最小生成树、网络流等;3. 培养学生运用图论知识解决实际问题的能力。
技能目标:1. 培养学生运用图论算法编程解决问题的能力;2. 提高学生分析问题、设计算法和解决问题的能力;3. 培养学生的团队协作和沟通能力。
情感态度价值观目标:1. 激发学生对图论和网络流算法的兴趣,培养其主动探索的精神;2. 培养学生面对复杂问题时,保持积极、严谨的态度;3. 引导学生认识到图论在网络科学、运筹学等领域的广泛应用,增强其社会责任感。
本课程针对高中年级学生,课程性质为选修课,旨在帮助学生拓展知识面,提高逻辑思维能力和解决问题的能力。
考虑到学生的年龄特点,课程内容将注重实际应用,结合生活实例,引导学生发现图论在网络流算法中的重要作用。
在教学过程中,注重启发式教学,鼓励学生主动思考、提问,培养其创新意识。
通过本课程的学习,期望学生能够掌握图论基本知识,运用网络流算法解决实际问题,并在此过程中,形成积极的学习态度和价值观。
二、教学内容1. 图的基本概念- 图的表示方法(邻接矩阵、邻接表)- 顶点与边的性质(度、路径、连通性)2. 图论关键算法- 最短路径算法(Dijkstra算法、Floyd算法)- 最小生成树算法(Prim算法、Kruskal算法)- 网络流算法(Ford-Fulkerson算法、Edmonds-Karp算法)3. 图论在实际问题中的应用- 交通网络分析- 电信网络设计- 社交网络分析4. 教学内容安排与进度- 第1周:图的基本概念及表示方法- 第2周:最短路径算法及其应用- 第3周:最小生成树算法及其应用- 第4周:网络流算法及其应用5. 教材章节及内容列举- 教材第3章:图的基本概念- 教材第4章:最短路径与最小生成树算法- 教材第5章:网络流算法及其应用教学内容根据课程目标进行选择和组织,注重科学性和系统性。