悬挂运动控制系统设计
- 格式:docx
- 大小:12.04 KB
- 文档页数:2
浅析汽车底盘主动悬架控制方法随着汽车技术的不断发展,汽车底盘主动悬架系统已经逐渐成为了一种常见的装备。
这种系统可以根据车辆当前的驾驶状态和路况来主动调节悬架硬度,提升行车舒适性和稳定性。
在本文中,我们将对汽车底盘主动悬架控制方法进行一个浅析。
一、主动悬架原理主动悬架是指车辆悬挂系统具备主动调节功能,通过传感器感知车身运动状态,再根据实时数据调节悬架系统的工作参数,实现对车身姿态和路面适应性的主动调节。
主动悬架主要包括主动减振和主动悬架控制两部分。
主动减振通过控制减振器的阻尼力来调节车辆的悬挂硬度;主动悬架控制则通过控制空气悬挂元件或电磁阻尼器来实现对车辆悬挂的主动调节。
二、主动悬架控制方法1. 传统悬架控制传统的悬架系统主要通过设置不同的弹簧和减振器来实现对车辆悬挂系统的调节。
这种悬架系统在工作过程中需要依靠车辆的行驶速度和路面情况来进行调节,无法实现主动的悬架控制。
因此在高速行驶和复杂路况下,传统悬架系统的性能会受到一定的限制。
主动悬架控制方法则是通过悬架系统内置的传感器和控制单元,实时感知车辆的运动状态和路面情况,并根据这些数据来主动调节悬架系统的工作参数。
目前主动悬架系统主要采用以下几种控制方法:(1)电子控制电子控制是主动悬架系统的核心技术之一,通过悬挂系统内置的控制单元收集和处理来自传感器的数据,并根据预设的悬架调节算法来控制悬挂系统的工作状态。
在电子控制技术的支持下,主动悬架系统可以根据车辆当前的行驶状态和路况主动调节悬架硬度,提升行车舒适性和稳定性。
(2)气动控制为了实现对悬架系统的精准控制,主动悬架系统还需要配备一套高效的控制算法。
主动悬架控制算法的设计主要考虑以下几点:姿态控制是主动悬架系统的重要功能之一,通过感知车辆的侧倾角和纵向加速度来调节悬架系统的工作状态,提升车辆的稳定性和操控性。
(2)路面适应(3)悬挂硬度调节主动悬架系统在汽车领域具有广泛的应用前景,目前已经成为了豪华车和高端车型的标配。

主动式悬挂系统设计及其在汽车操控性能中的研究引言汽车行驶时的悬挂系统是影响汽车操控性能的关键因素之一,其直接影响车辆行驶的平稳性、舒适性、安全性和操控性等方面。
传统的悬挂系统通常采用被动式悬挂结构,但随着汽车工业的不断发展和技术的进步,主动式悬挂系统逐渐成为汽车行业的一个热点研究课题。
本文将介绍主动式悬挂系统的设计原理和其在汽车操控性能中的重要作用,为读者对该领域有更深入的了解和认识提供参考。
主动式悬挂系统的设计原理传统的被动式悬挂系统通过减震器、弹簧和悬架等结构组成,在汽车行驶过程中承受车辆的冲击和震动,以达到保持车身稳定和悬挂系统对路面的适应性。
而主动式悬挂系统则采用先进的电控技术,通过检测车辆的运动状态和路面反馈信息,控制悬挂系统的行为来对路面的反应进行自适应调整,以改善车辆的行驶稳定性、舒适性和安全性。
主动式悬挂系统主要由以下几个关键部分组成:1. 悬挂系统传感器:用于检测车辆运动状态以及路面反馈信息。
2. 控制单元:负责接收传感器信号、开展计算和控制悬挂系统的行为。
3. 调节阀或执行机构:用于调整悬挂系统的行为。
主动式悬挂系统的调节方式通常分为两种:1. 电控调节:通过电控技术调整悬挂系统的行为,包括硬度、反弹和压缩等方面。
2. 液压调节:通常采用阀门或执行机构,通过调整油路来控制减震器的行为。
主动式悬挂系统在汽车操控性能中的研究主动式悬挂系统对汽车操控性能的提升是显著的,其主要表现在以下几个方面:1. 悬挂系统自适应调整:主动式悬挂系统通过检测车辆状态和路面反馈,自动调整悬挂系统,以适应不同的路况和驾驶风格,使车辆行驶更为平稳和舒适。
2. 悬挂系统负载调整:主动式悬挂系统可以根据车辆负载变化和行驶状态的不同,调整悬挂系统的硬度和结构,以保持其对路面的适应性和稳定性。
3. 悬挂系统弹簧压缩调节:主动式悬挂系统可以根据路面的情况和车速的不同,调节弹簧的压缩行为,以减少车辆的颠簸和摇晃,提高行驶的稳定性。
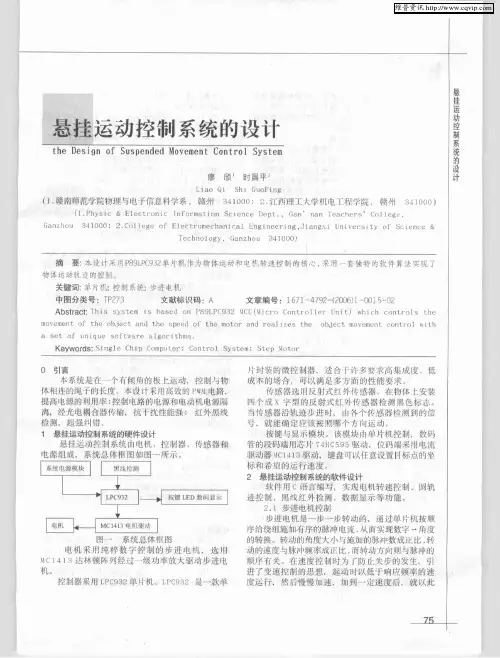
TMS320F28027与L298N的悬挂运动控制系统设计程章格;谷若雨;王海波;刘和平;邓力【期刊名称】《单片机与嵌入式系统应用》【年(卷),期】2014(14)5【摘要】介绍了由TMS320F28027和 L298N模块以及编码器组成的悬挂运动控制系统。
该系统通过控制2个步进电机,控制轴上线的收放来达到使悬挂物在平面内任意运动的效果,以实现画圆或指定图案和显示当前坐标等功能。
主要介绍了步进电机的控制算法和利用TMS320F28027芯片实现位置闭环控制的方法。
该系统具有高效、稳定、准确等优点。
%The suspended movement control system which is consist of TMS320F28027,L298N module and absolute rotary encoder.The system simultaneously controls two step motors to move freely in a plane surface by rolling the line of the step motor’s control shaft, and it achieves the function of circling,drawing specified patterns,displaying the current coordinates,and so on.This paper focuses on the exploration of the control algorithms under control and the way to conduct the chip TMS320F28027.The system has the advantages of stability,efficiency and accuracy.【总页数】4页(P49-51,55)【作者】程章格;谷若雨;王海波;刘和平;邓力【作者单位】重庆大学电气工程与自动化,重庆 400044;重庆大学电气工程与自动化,重庆 400044;重庆大学电气工程与自动化,重庆 400044;重庆大学电气工程与自动化,重庆 400044;重庆大学电气工程与自动化,重庆 400044【正文语种】中文【中图分类】TM301.2【相关文献】1.基于MSP430F449的悬挂运动控制系统设计 [J], 费婷婷;刘蓉;周乐意;袁子晴2.基于FPGA控制的悬挂运动控制系统设计 [J], 谭菊华;王东波;刘桥3.基于MCS-51单片机的悬挂运动控制系统设计 [J], 张程;聂虹4.悬挂运动控制系统设计 [J], 芮长城;温阳东;方龙5.基于单片机的悬挂运动控制系统设计 [J], 李积英因版权原因,仅展示原文概要,查看原文内容请购买。
第21卷第3期海军航航空工程学院院学报V ol.21No.32006年5月JOURNAL OF NA VAL AERONAUTICAL ENGINEERING INSTITUTE May.2006收稿日期2005-11-26作者简介刘华章1963男副教授硕士.悬挂运动控制系统设计刘华章1张晨亮1唐建华21海军航空工程学院电子信息工程系2海军航空工程学院训练部山东烟台264001摘要介绍了以凌阳单片机SPCE 061A 板为核心作为悬挂运动控制的系统实现了键盘输入识别传感器信号采集电机驱动电路控制等功能根据物体在平面任一处两端吊绳的长度唯一确定的原理通过单片机编程控制电机转动带动吊绳伸长或缩短实现物体沿任意设定轨迹运动引导部分用反射式红外传感器探测板面黑线信息送入单片机处理后控制物块沿黑线前进该系统可以完成到达任意预设坐标沿自行设定轨迹运动以板上任意处为圆心画直径为50cm 的圆和寻黑线前进任务关键词单片机红外传感器步进电机中图分类号T N 91文献标识码A1设计任务和要求1.1设计任务设计一电机控制系统控制物体在倾斜仰角100°的板上运动在一白色底板上固定两个滑轮两只电机固定在板上通过穿过滑轮的吊绳控制一物体在板上运动运动范围为80c m 100c m物体的形状不限质量大于100g物体上固定有浅色画笔以便运动时能在板上画出运动轨迹板上标有间距为1cm 的浅色坐标线不同于画笔颜色左下角为直角坐标原点如图1所示图1悬挂运动控制系统示意图1.2要求1.2.1基本要求1控制系统能够通过键盘或其他方式任意设定坐标点参数2控制物体在80cm 100cm 的范围内作自行设定的运动运动轨迹长度不小于100cm 物体在运动时能在板上画出运动轨迹限300s内完成3控制物体在圆心有效范围内直径为50cm的圆周运动限300s内完成4物体从坐标原点出发在150s 内到达设定的一个坐标点两点间直线距离不小于40cm1.2.2发挥要求1能够显示物体中画笔所在位置的坐标2控制物体沿板上标出的任意曲线运动见图1曲线在测试时现场标出线宽1.5 1.8c m总长度约50cm黑色曲线的前一部分是连续的长约30cm 后一部分是两段总长约20cm 的间断线段间断距离不大于1c m 沿连续曲线运动限定在200s 内完成沿间断曲线运动限定在300s内完成3其他2系统设计与实现2.1系统的总体设计方案系统主要通过键盘输入四种指令坐标自定80cm100cm 15cm15cm15c m15c m O ABCD原点海海军军航空工程程学学院学报2006年第3期368义画圆寻迹其中坐标代表物体从某一坐标点到达设定的另一坐标点自定义代表物体作自行设定的运动画圆代表物体作画圆运动寻迹代表物体沿黑线轨迹前进四种指令通过L C D显示器显示出来同时L C D 显示器提示输入各个坐标如当选择坐标指令时提示输入某点坐标值当选择画圆指令时提示输入原点坐标值输入完毕后凌阳单片机SPCE 061A [1]控制步进电机完成相应动作当物体作寻迹运动时凌阳单片机接受由8个红外传感器组成的物体寻迹模块的信号做出相应的判断控制电机的运转完成动作系统总体原理[2]框图如图2所示图2系统总体原理框图2.2系统单元电路设计2.2.1步进电机驱动电路采用两个三相的步进电机型号为55BF004步进电机工作的原理是步进电动机将电脉冲信号转换成直线位移或角度位移步进电动机的运动由一系列电脉冲信号控制完成单片机每输出一个脉冲步进电机就转动一个角度或前进一步它的位移与输入脉冲的数目成正比速度与脉冲频率成正比电机驱动电路[3]如图3所示此电路图画出的是步进电机其中一相的驱动电路另外三相的驱动电路与此电路图相同其工作原理为单片机输出脉冲通过光耦合器与电动机驱动部分电路隔离实现小信号电路控制大功率电路的目的在此我们让电机工作在三相六拍工作方式步进电机方向控制的原理为设置某一方向为正方向其三相六拍各相输入方式示意为A B C各代表一相输入A A BBB C CC A A 那么反向应该是A A C C C B B B A A 这样可以控制电机转向步进电动机速度控制原理为控制步进电动机的运行速度可以通过控制单片机发出脉冲的频率或者换相的周期来实现图3步进电机的一路驱动电路2.2.2红外传感器电路红外传感器电路[4]包括发射电路和接收电路两部分发射电路见图4电路由555定时器发射占空比可调的方波信号输入三极管b 极使三极管工作在开关状态驱动红外发射管发射红外线接收电路见图5电路中红外接收管接收到红外线时导通无红外时截止导通时L M 339的7端输入为低截止时输入为高经LM 339以及后面电路进行信号调理后输出T T L电平信号送给单片机图4红外发射电路图5红外接收电路2.3系统的软件设计系统的软件主要完成对整个过程的整体统筹把每个分任务通过程序联系起来对硬件输入的各种信号进行相应处理完成动作SPC E061A物体寻迹模块电机驱动模块键盘输入LCD 显示语音播报总第87期刘华章等悬挂运动控制系统设计3692.3.1系统总的流程图根据题目的要求经过仔细分析充分考虑各种因素制定了整体的设计方案系统开始检测键盘等待输入各种命令当有命令输入时调用该命令所对应子程序完成各种命令同时显示数据系统总的流程图如图6所示图6系统总的流程图假设物体从C 点运动到D 点见图1A 点坐标为15115B点坐标为95115C 点坐标为x n ,yn D点坐标为x n+1,yn+1则22)115()15(AC n n y x +=22)115()95(BC n n y x +=2121)115()15(AD +++=n n yx 2121)115()95(BD +++=n n yx 则左电机的拉伸距离为L S=A D A C 右电机的拉伸距离为RS=B D B C 物体从原点到设定坐标点软件流程图如图7所示图7物体从原点到设定坐标点的流程图2.3.2控制物体作圆周运动的软件设计把一个半径为25c m 的圆周平均分成360等份计算出圆周线上各个分点的坐标首先物体放到圆周左侧然后物体沿着各个点依次走下去即完成了画圆物体作圆周运动如图8所示图8物体作圆周运动示意图由上图可得n 点X 轴坐标为)180/14.3cos(250×=n x xn (5)n 点Y 轴坐标为)180/14.3sin(250×+=n y yn (6)同理可求得n +1点的坐标x n+1,yn+1点调用坐标子程序控制电机拖动物体从而实现画圆控制物体作圆周运动软件流程图如图9图9控制物体作圆周运动的流程图2.3.3控制物体寻迹运动的软件设计物体上的寻迹红外传感器的分布如图10所示8只传感器均匀分布在圆周上传感器相互间的距离不宜过大否则会增大运动轨迹与黑线的误差也不宜过小否则相邻传感器打到白纸上的红外光会互相串入引起干扰从而产生误动作寻迹的原理如图11所示首先把8个传感器中的一个放于黑线的起点当从键盘输入寻迹指令时物体开始沿探测到黑线的这个传感器与中心点O 的连线的方向前进此时检测此传感器相邻的4个传感器是否压黑线如果没有压黑线则使物体继续保持原方向运动如果压黑线则使物体沿当前压黑线的传感器与中心点O 的连线的向前进此时同样需要检测当前传感器相邻的4个传感器是否压设定当前坐标检测键盘输入目标坐标进入画圆子程序进入坐标子程序寻坐标自定义寻黑线画圆输入运行轨迹进入自定义曲线子程序输入圆心N 进入黑线子程序坐标合理YYYYYNNN 开始N 计算A C -A D 的值输入目标坐标Y NYNN开始计算BD -B C 的值电机步数设置左边电机完成运动左边电机停止右边电机完成运动左右均到达目标右边电机停止Y输入圆心坐标x 0yn 赋值为0判断圆心坐标是否合理计算x n+1y n +1的值调用寻坐标子程序实现从x n y n 点到x n+1y n+1点n 加1n 360?开始n+1OnN N+1海海军军航空工程程学学院学报2006年第3期370黑线如此循环检测可以解决任意曲线的寻迹如果传感器在3s 之内没有发现黑线则说明物体已经全部离开黑线寻迹完毕重物往回运动2s 的目的是为了让重物返回黑线末端图10物体上的寻迹红外传感器位置分布图图11控制物体寻迹运动的流程图3系统测试系统测试的目的是检测系统的各项功能是否达到题目要求的指标所需测试工具为米尺圆规秒表 1.8cm宽黑色胶布等系统需测试的功能项包括到达预设目标点的测试画圆的测试沿自行设定轨迹运动的测试寻迹功能测试本悬挂运动控制系统经过测试完成到达预设目标点测试画固定直径圆的测试沿自行设定轨迹运动的测试和寻黑线功能测试键盘设置灵活L C D实时显示物体所在位置坐标电机控制精确运行灵敏语音播报迅速各项指标完全符合题目要求4总结本系统以凌阳单片机61板为核心作为控制单元利用4*4键盘为输入模块用液晶显示屏显示多项指标信息实现人机交互和物体按要求运动的各项功能利用光电传感器探测黑线所处方向步进电机作为驱动物体运动装置在系统设计过程中力求硬件线路简单充分发挥软件编程方便灵活的优势来满足系统各项要求参考文献[1]罗亚非.凌阳16位单片机应用基础[M ].北京:北京航空航天大学出版社,2003:2-8[2]全国大学生电子设计竞赛组委会.全国大学生电子设计竞赛获奖作品选编2003[G ].北京:北京理工大学出版社,2005:203-207[3]黄智伟.全国大学生电子设计竞赛训练教程[M ].北京:电子工业出版社,2005:115-117[4]何希才.传感器及其应用电路[M ].北京:国防工业出版社,2001:89-92D esi gn of ha ngi ng m ovem e nt cont r ol syst emL I U H uaz ha ng 1Z H A N G Che nl i ang 1T A N G Ji anhua21D epar t m ent of El ect r oni c and I nf orm at i on Engi neer ing N AEI2D epar t m ent of Trai ni ngN AEIY antaiShandong264001bst A bs t r act :The sys t em adopt s t he M CU SPCE061A as t he ker nel t o cont r ol t he m ovem ent of t hesubj ect .I t can i dent i f y t he i nput of t he keyboard,gat her t he i nf or m at i on fr omt he i nf rar ed w ave sens or s ,and cont r ol t he dri vi ng ci r cui t of m ot or devi ce.A ccordi ng t o t hat t he l engt h of t he r ope i s uni que for each pos i t i on of t he s ubj ect ,cont rol l i ng t he m ovem ent of t he m ot or t o change t he l engt h of t he r ope can r eal i ze t he pos i t i on change of t he s ubj ect .The det ect i on of t he bl ack t hr ead i s real i zed by r ef l ect i on i nf rar ed w ave s ens ors i n order t o as sur e t he subj ect m ove al ong w i t h t he bl ack t hread dr aw n ar bi t rar y.I n t he des i gn,i t can aut om at i cal l y ar r i ve at t he posi t i on s et arbi t rar y,sket ch a ci r cl e and s o on.ey or ds K ey w ords :M C U ;i nf rar ed w ave s ens or ;s t ep-m ot or红外传感器上下右左左上右上左下右下开始重物保持此传感器方向运动时间是否超过2sNNYY返回主程序确定当前压黑线传感器的位置从零开始计时检测此传感器左右90°范围的传感器是否压黑线重物停止运动使重物保持此传感器方向运动重物朝此传感器相反方向运动1s。
悬挂运动控制系统的设计本毕业设计课题是属于教师拟定性课题,主要是研究基于单片机的对步进电机的有效控制。
步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件,每输入一个脉冲电机转轴步进一个步距角增量。
电机总的回转角与输入脉冲数成正比例,相应的转速...<P>本毕业设计课题是属于教师拟定性课题,主要是研究基于单片机的对步进电机的有效控制。
步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件,每输入一个脉冲电机转轴步进一个步距角增量。
电机总的回转角与输入脉冲数成正比例,相应的转速取决于输入脉冲频率。
<BR> 步进电机是机电一体化产品中关键部件之一,通常被用作定位控制和定速控制。
步进电机惯量低、定位精度高、无累积误差、控制简单等特点。
广泛应用于机电一体化产品中,如:数控机床、包装机械、计算机外围设备、复印机、传真机等。
<BR><BR> Abstract<BR>This article mainly elaborated has been hanging the movement control system merit, introduced was hanging the movement control system function, the principle and the design process. Is hanging the movement control system is one of in control engineering domain important applications, its main target is to is controlled the object the movement condition, including path, speed and position implementation check. The movement control system compares with other control systems, has the system model simply, the check algorithm is unitary, also not complex characteristic and so on non-linearity and coupling situation. Also is precisely because the movement control system can implement to the path, the running rate, the pointing accuracy as well as the repetition precision accuracy control requirement, has the broad application foreground in each category of control engineering, therefore the movement control system has at present become in the check study application domain very much significant the research direction. Through the monolithic integrated circuit to stepping monitor check, implemented the motor-driven to cause the object at on the board which inclined the movement, The control section is the SST89E52 monolithic microcomputer which SST Corporation produces primarily, with when the 1602LCD liquid crystal screen and according to turned has implemented with the user interactive, through the keyboard entry different control command, the liquid-crystal display was allowed to display the setting value and the run thecoordinates. The electrical machinery control section used LM324N four to transport puts and is connected the electronic primary device voluntarily to develop the 42BYG205 stepping monitor actuation electric circuit to implement the electrical machinery accuracy control. The algorithm partially for will suit the monolithic integrated circuit system to operate carries on optimizes many times, will reduce the microprocessor the operand. Has completed the object voluntarily the movement and according to the different setup path movement. <p class='Uux450'></p> <BR>Key words Magneto; 1602LCD; LM324N; Drive circuit <pclass='Uux450'></p> </P><P> 选择步进电机时,首先要保证步进电机的输出功率大于负载所需的功率。
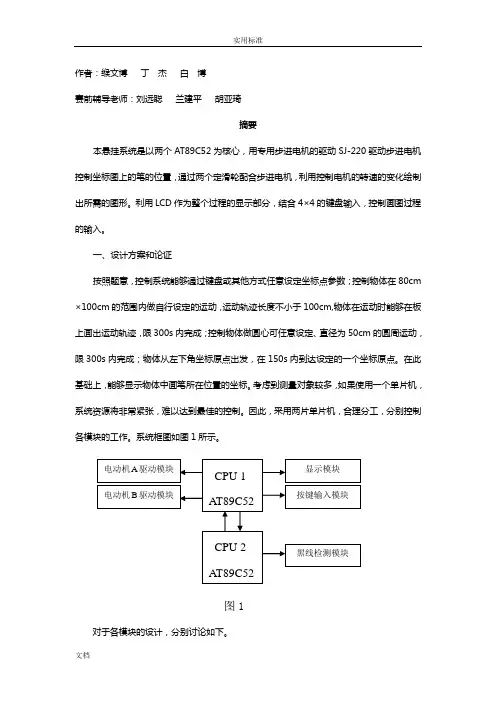
作者:缑文博丁杰白博赛前辅导老师:刘远聪兰建平胡亚琦摘要本悬挂系统是以两个AT89C52为核心,用专用步进电机的驱动SJ-220驱动步进电机控制坐标图上的笔的位置,通过两个定滑轮配合步进电机,利用控制电机的转速的变化绘制出所需的图形。
利用LCD作为整个过程的显示部分,结合4×4的键盘输入,控制画图过程的输入。
一、设计方案和论证按照题意,控制系统能够通过键盘或其他方式任意设定坐标点参数;控制物体在80cm ×100cm的范围内做自行设定的运动,运动轨迹长度不小于100cm,物体在运动时能够在板上画出运动轨迹,限300s内完成;控制物体做圆心可任意设定、直径为50cm的圆周运动,限300s内完成;物体从左下角坐标原点出发,在150s内到达设定的一个坐标原点。
在此基础上,能够显示物体中画笔所在位置的坐标。
考虑到测量对象较多,如果使用一个单片机,系统资源将非常紧张,难以达到最佳的控制。
因此,采用两片单片机,合理分工,分别控制各模块的工作。
系统框图如图1所示。
对于各模块的设计,分别讨论如下。
1.电动机及其的选择(1)电动机的选择方案一:使用步进电机。
其优点在于速度易于控制,可以实现快速启停,且转动角度严格可控。
可以根据驱动脉冲电流的次数计算小车的行驶距离,省去距离测量这一环节。
步进电机的功率大,速度可调,转速稳定,可以达到精密控制。
方案二:使用直流电机,用脉冲宽度调节方法,对电机进行控制。
但此方案的缺点也很明显,直流电机动起来惯性大,转速不易控制,很难达到精确地控制,误差较大。
因此,选择方案一。
(2)电动机驱动模块所用电动机是四相电动机,需要放大4路驱动信号。
方案一:采用4路三极管放大电路驱动,该方案电路复杂,可靠性难以保证。
方案二:采用专用的步进电机驱动SJ—220, SJ-220驱动器驱动二相混合式步进电机,该驱动器采用原装进口模块,实现高频斩波,恒流驱动,具有很强的抗干扰性、高频性能好、起动频率高、控制信号与内部信号实现光电隔离、电流可选、结构简单、运行平稳、可靠性好、噪声小,带动2A以下所有的42BYG、57BYG、系列步进电机。
汽车悬挂系统设计【摘要】: 悬挂系统是指由车身与轮胎间的弹簧和避震器组成的整个支持系统。
悬挂系统的功能是支持车身,改善乘坐的感觉,不同的悬挂设置会使驾驶者有不同的驾驶感受。
外表看似简单的悬挂系统综合多种作用力,决定着轿车的稳定性、舒适性和安全性,是现代轿车十分关键的部件之一。
论文回顾了汽车悬挂系统的发展历程,介绍了悬挂系统的分类和组成,详细分析了各种悬挂系统的优劣,进行了对比。
最后根据汽车的要求,选定了悬挂系统的组合,前悬架为麦弗逊式独立悬挂,后悬架为钢板弹簧整体式悬挂。
并且确定了前后悬挂的技术参数,在设计中着重考虑了汽车的稳定性和操控性,对整个系统进行了运动学和力学分析计算。
最后使用AUTOCAD绘制出了汽车悬挂的装配图和部分零件图。
【关键字】: 汽车悬挂独立悬挂非独立悬挂麦弗逊式独立悬挂钢板弹簧整体式悬挂The Design Of Car Suspension System【Abstract】 Suspension is means that the body and tires between spring and shock absorber for the entire support system. The function of suspension system is to support the body, improve the ride feel different suspension settings the driver will have different driving experience. Appeared to be a simple suspension system integrated a variety of forces, determine thecar's stability, comfort and safety of modern cars is one of key components. This thesis reviews the development history of the suspension systems and introduces the classification and composition of it. Secondly, the thesis detailed analysis the pros and cons of various suspension systems, were compared. Finally, according to the requirements of vehicles, decided on a combination of the suspension, front suspension is McPherson independent suspension, leaf spring rear suspension for the whole suspension. And determined the two suspensions of the technical parameters considered in the design focused on stability and control of the car, the whole system of calculation of the kinematics and mechanics. Finally out of the car hanging AUTOCAD drawing, assembly drawing and part of the parts drawing.【Key words】: car suspension system; independent suspension; solid axle suspension; macpherson type; leaf-spring dependent suspension目录【摘要】I1.绪论- 1 -1.1汽车悬挂的基本原理- 1 -1.2汽车悬挂的发展史- 2 -2.汽车悬挂的组成和分类 - 4 - 2.1汽车悬挂的组成- 4 -2.2非独立悬架的类型及特点- 5 - 2.2,1钢板弹簧式非独立悬架- 5 - 2.2.2螺旋弹簧非独立悬架- 5 - 2.2.3空气弹簧非独立悬架- 6 - 2.3独立悬架的类型及特点- 6 - 2.3.1双横臂式- 7 -2.3.2麦弗逊式(滑柱连杆式) - 8 - 2.3.3 双叉臂式悬挂- 9 -2.3.4 拖拽臂式悬挂- 12 -2.3.5 连杆支柱悬挂- 14 -2.3.6 多连杆独立悬挂- 15 -3.悬挂系统的选择 - 18 -3.1前独立悬架的选择- 18 -3.2后悬架的选择- 19 -3.3整车参数- 20 -4.悬挂系统的计算 - 21 -4.1 前悬架的设计计算- 21 - 4.1.1弹簧形式的选择- 21 -4.1.2弹簧参数的计算- 21 -4.1.3弹簧的校验- 24 -4.2后悬架的设计计算- 25 -4.2.1弹性元件的选择- 25 -4.2.2钢板弹簧参数的设计计算- 26 -4.2.3钢板弹簧的强度校验- 29 -4.3 减振器的结构原理及其功用 - 30 -4.4 横向稳定器的作用- 32 -5. 总结 - 35 -致谢 - 36 -参考文献- 37 -1.绪论1.1汽车悬挂的基本原理悬挂,其名源于西方。
悬挂运动控制系统摘要:本系统采用STC89C54作为控制中心,由步进电机、红外收发对管、4*4键盘及中文液晶显示屏构成的悬挂运动控制系统。
该系统能自由控制悬挂物体完成自行设定运动、画圆运动、沿黑线运动等,并能正确显示物体到达的坐标位置。
关键词:控制核心;寻迹;步进电机;算法;定位1系统模块的方案比较与论证1.1 控制器模块根据题目要求,控制器模块主要用于各个传感器信号接收、控制物体运动、控制显示坐标及运动时间等。
对于控制器有以下二种方案。
方案一:采用FPGA为系统的控制器,FPGA可以实现各种复杂的逻辑功能,模块大,密度高,它将所有器件集成在一块芯片上,减少了体积,提高了稳定性,并且可应用EDA软件仿真、调试,易于进行功能控制。
FPGA采用并行的输入输出方式,提高了系统的处理速度,适合作为大规模实时系统的控制核心。
通过输入模块将参数输入给FPGA,FPGA通过程序设计控制步进电机运动,但是由于本设计对数据处理的时间要求不高,FPGA的高速处理的优势得不到充分体现,并且由于其集成度高,使其成本偏高,同时由于芯片的引脚较多,实物硬件电路板布线复杂,加重了电路设计和实际焊接的工作。
方案二:采用A T89S52单片机作为系统控制器。
单片机算术运算功能强,软件编程灵活、自由度大,可用软件编程实现各种算法和逻辑控制。
由于其功耗低、体积小、技术成熟和成本低等优点,各个领域应用广泛。
并且,由于芯片引脚少,在硬件很容易实现。
因此,在本设计中采用A T89S52处理输入的数据并控制电机运动。
综合上述两种方案,方案二较为简单,可以满足设计要求。
1.2电机的选择方案一:采用直流电机。
直流电机具有最优越的调速性能,主要表现在调速方便(可无级调速)、调速范围宽、低速性能好(起动转矩大、起动电流小)、运行平稳、噪音低、效率高等方面,但是控制复杂,定位精度差,积累误差大等缺点。
方案二:采用步进电机。
步进电机具有控制简单、定位精确、无积累误差等优点。
悬挂运动控制系统设计
引言在现代的工业控制、车辆运动和医疗设备等系统中,悬挂运动系统的应用越来越多,在这些系统中悬挂运动部件通常是具体的执行机构,因而悬挂部件的运动精确性是整个系统工作效能的决定因素,而在实际中实现悬挂运动控制系统的精确控制是非常困难的。
我们采用AT8 9 5 l 单片机和步进电动机设计了悬挂运动控制系统,由单片机产生脉冲信号驱动有精确步距的步进电动机,电机带动悬挂部件在平面上做特定的准确运动。
系统的硬件设计与实现本系统硬件可分为控制部分、电动机驱动部分、键盘输入部分和显示部分。
1、控制部分系统的控制部分为单片机最小系统,单片机采用ATME L 公司的AT8 9 C5 1 芯片,因为作为系统控制芯片,AT8 9 系列算术运算功能强,可以用不同的语言软件编程(如 c 语言、汇编语言),编程简单,易于实现控制要求和控制算法,并且AT8 9 C 5 1 芯片具有体积小,功耗较低,成本低,程序写入简单方便等优点。
2、驱动部分为实现硬件上对步进电动机的精确驱动,我们采用 2 个高性能细分S M 一 2 0 2 A 驱动控制器,该控制器采用新型的双极性横流斩波技术,输入频率宽,所以电动机运行精度高,振动小,噪声低,运行过程中比较平稳,适合驱动中小型的任何两相或四相混合式步进电机。
而且在该驱动器还标明了各个按键开合时所对应的电流、驱动器的静转矩和步矩角,这给电动机在实际工作的过程中提供r 很大的方便。
3、数码管显示电路设计用单片机的P E l 和P 口来控制数码管的显示,P 口作为数码管的选通端,P 口_ l 乍为输出端,将设定点的坐标从数码管上显示出来。
通过数码管显示,可以将输入坐标显示求,以防止输入数据出错产生不必要的麻烦。