2021年全站仪三角高程测量【全站仪三角高程测量新方法】
- 格式:doc
- 大小:17.08 KB
- 文档页数:5

全站仪进行三角高程测量的新方法
李树通
【期刊名称】《内蒙古煤炭经济》
【年(卷),期】2009(000)002
【摘要】使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性.经过长期摸索,总结出一种新的方法进行三角高程测量.这种方法既结合了水准测量的任一置站的特点,又减少了三角高程的误差米源,同时每次测量时还不必量取仪器高、棱镜高.使三角高程测量精度进一步提高,施测速度更快.
【总页数】2页(P62-63)
【作者】李树通
【作者单位】内蒙古煤矿设计研究院,勘测队,内蒙古,呼和浩特,010010
【正文语种】中文
【中图分类】TD173
【相关文献】
1.应用全站仪进行三角高程测量的新方法 [J], 李志超;张伟东
2.应用全站仪进行三角高程测量的新方法 [J], 吕建红
3.应用全站仪进行三角高程测量的新方法 [J], 吕建红
4.用全站仪新方法进行三角高程测量 [J], 朱岩;李玉虎
5.应用全站仪进行三角高程测量的新方法 [J], 尚明
因版权原因,仅展示原文概要,查看原文内容请购买。

全站仪三角高程测量方法及精度分析摘要:通过结合全站仪和跟踪杆,我们可以大大提升测量高程的准确性,并且随着应用频率的增加,这种方法也会受到越来越多的重视。
相比于传统的三角测量方法,新型的三角测量技术不仅可以克服其局限性,还能够大大降低误差,提升测量精度。
通过采用无需重复测量仪器和棱镜高度的方式,可以大大减轻外部作业的负担,并且提高测量的效率,这种方法在实际应用中表现出色。
关键词:全站仪;三角高程测量;测量方法;精度分析引言通过使用全站仪测量三角高程,我们可以建立一个三维坐标控制网。
这种方法包括对向观测法和中间观测法。
在进行对向观测时,我们通常会将大气折射系数视为一个常数,但是如果我们忽略了不同方向折射系数的差异性,那么我们就无法准确地评估整个系统的精度。
通过中间观测法,我们可以将折光系数作为一个方向变量来考虑大气折射误差对三角高程测量的影响。
因此,本文将详细介绍三角高程测量方法,并对它们的准确性进行比较分析。
1研究背景和现状高程测量是测量工作的重要组成部分,现代高程测量技术包括水准测量、三角测量和GPS高程测量。
然而,GPS 高程测量技术存在测量精度较低的问题,无法满足日常测量的需求。
此外,传统的三角测量技术,如全站仪测量,也存在一定的局限性,无法满足高程测量的需求。
通过使用全站仪进行三角测量,可以获得两点之间的垂直高度差,这种方法比传统的水平测量更加精确,而且由于没有受到地形的影响,可以更加迅速、准确地完成测量任务。
2全站仪的基本测量原理测量是一项重要的技术,它的主要目的是测量物体的位置、倾斜角、高差。
与传统的测量方式不同,全站仪可以快速、准确地完成测量,大大提高了测量效率,并有效地减少了测量结果的偏差。
全站仪望远镜具有独特的优势,它的核心技术就是其精准的视准轴、高精度的测距光波发射与接收光轴的同轴化,以及可靠的双轴自动倾斜补偿,使得它可以一次性完成所有的测量要素,并确保测量结果的准确性。
3全站仪三角高程测量方法特征分析以及研究进程3.1单向观测法使用全站仪三角高程测量单向观测法可以获得较高的水准测量精度,但是在进行测量之前,必须充分考虑地球曲率和大气折射带来的可能影响,这将会对测量结果产生重大影响。


随着社会的进步,使用跟踪杆配合全站仪测量高程的方法越来越普及,而传统的三角高程丈量方法已经显示出了局限性。
经过临时摸索,总结出一种新的方法进行三角高程丈量。
这种方法既结合了水准丈量的任一置站的特点,又减少了三角高程的误差来源,同时每次丈量时还不必量取仪器高、棱镜高。
使三角高程丈量精度进一步提高,施测速度更快。
工程的施工过程中,经常涉及到高程丈量。
保守的丈量方法是水准丈量、三角高程丈量。
两种方法虽然各有特色,但都存在着不足。
水准丈量是一种直接测高法,测定高差的精度是较高的但水准丈量受地形起伏的限制,外业工作量大,施测速度较慢。
三角高程丈量是一种间接测高法,不受地形起伏的限制,且施测速度较快。
大比例地形图测绘、线型工程、管网工程等工程丈量中广泛应用。
但精度较低,且每次丈量都得量取仪器高,棱镜高。
比较麻烦并且增加了误差来源。
随着全站仪的广泛使用,使用跟踪杆配合全站仪测量高程的方法越来越普及,使用保守的三角高程丈量方法已经显示出了局限性。
经过临时摸索,总结出一种新的方法进行三角高程丈量。
这种方法既结合了水准丈量的任一置站的特点,又减少了三角高程的误差来源,同时每次丈量时还不必量取仪器高、棱镜高。
使三角高程丈量精度进一步提高,施测速度更快。
一、三角高程丈量的激进方法如图一所示,设AB为地面上高度不同的两点。
已知A点高程HA 只要知道A点对B点的高差HA B即可由HB=HA +HA B得到B点的高程HBD为AB两点间的水平距离;α为在A点观测B点时的垂直角;i为测站点的仪器高,t为棱镜高;HA 为A点高程,HB为B点高程;V为全站仪望远镜和棱镜之间的高差(V=Dtanα)首先我假设AB两点相距不太远,可以将水准面看成水准面,也不考虑大气折光的影响。
为了确定高差hA B可在A点架设全站仪,B点竖立跟踪杆,观测垂直角α,并直接量取仪器高i和棱镜高t若AB两点间的水平距离为D则hA B=V+i-t故 HB=HA +Dtanα+i-t1这就是三角高程丈量的基本公式,但它以水平面为基准面和视线成直线为前提的因此,只有当AB两点间的距离很短时,才比较准确。

随着全站仪在工程测量中的普及,使用既可任意置站,又可减少误差来源,同时还无需每次量取仪器高及棱镜高度的棱镜跟踪杆配合全站仪测量高程方法,已愈发受到广大测量人员青睐。
通过已有工程实例证明,无量高全站仪三角高程测量法可使测量精度进一步提高、施测速度更快,特别适合于复杂环境下工程的应用。
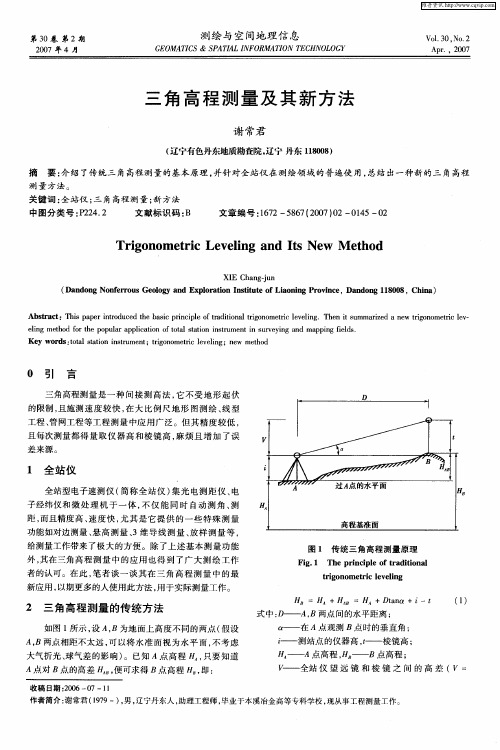
1 无量高全站仪三角高程测量法1.1 测点高程H测高法(1)公式推导图1为传统三角高程测量示意。
设HB为B点高程,已知;H A为A点高程,未知;现通过全站仪测定其他待测点的标高图1中,D为A、B两点间的水平距离,即高斯投影平面上两点的距离;i为测站点的仪器高。
图1 传统三角高程测量示意H A=H B-D tanα-i+t式中:D tanα即V值可用仪器直接测出,i、t均未知,但因仪器置好后,i 值将随之不变,同时选取棱镜跟踪杆作为反射棱镜,棱镜高度值t也将不变。
故待测点的高程为:HA+i-t=H B-D tanα=H0。
H A+i-t在任意测站上固定不变,且可以计算出其测站点高程H0。
故有H求= H0+D'tanα'+i-t。
式中:H求为待测点高程;D'为测站点到待测点的水平距离;α'为测站点到待测点的观测垂直角。
当i=0、t=0时,H求= H0+D'tanα'。
(2)操作过程1)选择与已知高程点通视的位置将仪器任意置点。
2)测出V值,计算出H0。
3)重新设定仪器测站点高程为H0,且设置仪器高及棱镜高为0。
4)照准待测点,测出其高程。
1.2 借高三维Z坐标测高法(1)公式推导借高三维Z坐标值测高法测量如图2所示,B=BM为后视点B的高程代号。
假设B点的高程H;已知,C点的高程HC未知,A点为任意置站点,通过全站仪测定C点的高程HC。
图2 借高三维Z坐标值测高法测量示意由Z坐标测量原理可知:Z B=Z A+D tanα+i-t式中:D tanα即V值可以用仪器直接测出,测出V值后将仪器中仪高值i改设为(t-D tanα)值、将测站点ZA坐标设置为基准点高点H B。
三角高程全站仪方法三角高程全站仪方法是一种非常精确的测量方法,可以用来测量三角高程和水准面高程,也是现代化测量技术的重要组成部分。
下面将分步骤阐述这种方法。
1. 前期准备在进行三角高程全站仪测量之前需要进行一些前期准备工作,例如探路、测量基光线坐标、设置测站及测站附属物、安装全站仪等。
2. 操作步骤(1)放置三角尺测量前首先要放置三角尺,一般情况下需要放置两个三角尺。
放置三角尺的位置应该在需要测量的区域内并且位置应该互相可见。
(2)放置全站仪安装好三角尺之后就可以放置全站仪了,放置的位置应该保证可以观测到两个三角尺,而且要保证全站仪与三角尺不会受到外力的干扰。
(3)校准全站仪放置好全站仪之后需要校准,主要包括两个方面,一是校准垂准方向,二是校准水平方向。
校准时需要使用三角尺进行调整,调整到两个三角尺处于同一平面内,并且与全站仪光轴垂直。
(4)观测数据校准全站仪之后就可以进行观测了,观测时需要测量三角尺与全站仪之间的距离和角度。
这个过程需要使用全站仪内置的观测软件进行计算,并且记录得到的数据。
(5)计算三角高程通过观测得到的数据,可以计算出三角高程。
计算过程中需要使用仪器的特定软件,将测量数据输入计算机并进行计算。
计算完之后会得到矢量和三角高程数据。
3. 注意事项在使用三角高程全站仪方法进行测量的过程中需要注意以下几点:首先要在操作之前做好准备工作,保证测量误差最小;其次,要注意仪器的防潮防尘措施,确保仪器的精确性。
以上就是围绕“三角高程全站仪方法”分步骤阐述的文章。
如今,这种精密的测量方法被广泛应用于建筑、土木工程、交通运输等领域。
它的出现彰显了人们对于精准度的追求,为我们提供了极大的便利和帮助,同时也提高了测量工作的准确性和效率。
全站仪三角高程测量方法
首先,确定测量点和参考点的位置。
在进行高程测量之前,需要确定好测量点
和参考点的位置。
测量点是需要测量高程的点,而参考点是已知高程的点。
在确定位置时,需要考虑到地形的起伏和可见性,以确保测量的准确性和可靠性。
其次,设置全站仪。
在确定好测量点和参考点的位置后,需要设置全站仪。
首先,将全站仪放置在水平地面上,并通过调节仪器的水平仪使其水平。
然后,通过调节仪器的望远镜使其指向参考点,并记录下参考点的水平角和垂直角。
接着,测量目标点的水平角和垂直角。
将全站仪指向测量点,并记录下测量点
的水平角和垂直角。
在记录角度时,需要确保仪器的稳定和准确,以避免误差的产生。
然后,计算高程。
通过测量得到的水平角和垂直角,可以利用三角函数的关系
计算出测量点的高程。
在计算高程时,需要考虑到地球的曲率和大地水准面的影响,以确保计算结果的准确性。
最后,校核和修正。
在完成高程测量后,需要对测量结果进行校核和修正。
校
核的目的是检验测量结果的准确性,而修正则是对可能存在的误差进行修正,以提高测量结果的可靠性和准确性。
通过以上的全站仪三角高程测量方法,可以实现对地面高程的准确测量。
在实
际的测量工作中,需要严格按照方法进行操作,并注意仪器的校准和调整,以确保测量结果的准确性和可靠性。
同时,需要根据实际情况对测量结果进行校核和修正,以提高测量的准确性和可靠性。
如何使用全站仪进行三角高程测定
全站仪是用来测量地面上各个点的三维坐标和高程的仪器。
在
进行三角高程测量时,我们需要准备好以下工具:
- 全站仪
- 一架三脚架
- 一个反光棒
- 一张三角高程测量表
具体操作步骤如下:
1. 将全站仪放在需要测量的点上,将三脚架张开并调整好高度,将全站仪放在三脚架上并固定。
2. 打开全站仪并对准带反光棒的目标点。
3. 在全站仪上选择三角高程测量功能,并输入目标点与全站仪
之间的距离。
4. 移动全站仪并对准另一个目标点,重复步骤3直到测量完所
有需要测量的点为止。
5. 将测量结果填入三角高程测量表中,并根据表格计算出每个
点的高程。
需要注意的事项:
- 在进行测量前应先校准全站仪,以确保测量结果的准确性。
- 在对准目标点时要注意不要对着阳光测量,避免阳光反射影
响测量结果。
- 在存储数据时要注意标注清楚每个点的具体位置,避免混淆。
以上就是使用全站仪进行三角高程测量的方法及注意事项。
希
望对你有所帮助!。
全站仪三角高程测量【全站仪三角高程测量新方法】
全站仪进行三角高程测量的新方法摘要:使用跟踪杆配合全站仪测量高程的新方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性。
这种方法既结合了水准测量的任一置站的特点,又减少了三角高程测量的误差,同时每次测量时还不必量取仪器高、棱镜高。
使三角高程测量精度进一步提高,施测速度更快。
关键词:全站仪三角高程新方法精度在工程的施工过程中,常常涉及到高程测量。
传统的测量方法是水准测量、三角高程测量。
两种方法虽然各有特色,但都存在着不足。
水准测量是一种直接测高法,测定高差的精度是较高的,但水准测量受地形起伏的限制,外业工作量大,施测速度较慢。
三角高程测量是一种间接测高法,它不受地形起伏的限制,且施测速度较快。
在大比例地形图测绘、线型工程、管网工程等工程测量中广泛应用,但精度较低,且每次测量都得量取仪器高,棱镜高,麻烦而且增加了误差。
这种新方法既结合了水准测量的任一置站的特点,又减少了三角高程测量的误差,同时每次测量时还不必量取仪器高、棱镜高。
使三角高程测量精度进一步提高,施测速度更快。
一、三角高程测量的传统方法如图所示,设A,B为地面上高度不同的两点。
已知A点高程HA,只要知道A点对B点的高差HAB即可由HB=HA HAB得到B点的高程HB。
图中:D为A、B两点间的水平距离а为在A点观测B点时的垂直角 i为测站点的仪器高,t为棱镜高 HA为A点高程,HB为B点高程。
V为全站仪望远镜和棱镜之间的高差(V=Dtanа)首先我们假设A,B两点相距不太远,可以将水准面看成水平面,也不考虑大气折光的影响。
为了确定高差hAB,可在A点架设全站仪,在B点竖立跟踪杆,观测垂直角а,并直接量取仪器高i和棱镜高t,若A,B 两点间的水平距离为D,则hAB=V+ i-t 故 HB=HA+Dtanа+i-t (1)这就是三角高程测量的基本公式,但它是以水平面为基准面和视线成直线为前提的。
因此,只有当A,B两点间的距离很短时,才比较准确。
当A,B两点距离较远时,就必须考虑地球曲率和大气折光的影响。
这里不叙述如何进行球差和气差的改正,只就三角高程测量新法的一般原理进行阐述。
我们从传统的三角高程测量方法中可以看出,它具备以下两个特点: 1、全站仪必须架设在已知高程点上 2、要测出待测点的高程,必须量取仪器高和棱镜高。
二、三角高程测量的新方法如果我们能将全站仪象水准仪一样任意置点,而不是将它置在已知高程点上,同时又在不量取仪器高和棱镜高的情况下,利用三角高程测量原理测出待测点的高程,那么施测的速度将更快。
如上图,假设B点的高程已知,A点的高程为,
这里要通过全站仪测定其它待测点的高程。
首先由(1)式可知: HA=HB-(Dtanа+i-t) (2)上式除了Dtanа=V的值可以用仪器直接测出外,i,t都是的。
但有一点可以确定即仪器一旦置好,i值也将随之不变,同时选取跟踪杆作为反射棱镜,假定t值也固定不变。
从(2)可知: HA+i-t=HB-Dtanа=W (3)由(3)可知,基于上面的假设,HA +i-t在任一测站上也是固定不变的,而且可以计算出它的值W。
这一新方法的操作过程如下: 1、仪器任一置点,但所选点位要求能和已知高程点通视。
2、用仪器照准已知高程点,测出V(V值可以直接读出)的值,并算出W的值。
(此时与仪器高程测定有关的常数如测站点高程,仪器高,棱镜高均为任一值。
施测前不必设定。
)
3、将仪器测站点高程重新设定为W,仪器高和棱镜高设为0即可。
4、照准待测点测出其高程。
下面从理论上分析一下这种方法是否正确。
结合(1),(3) HB′=W +D′tanа′ (4) HB′为待测点的高程 W为测站中设定的测站点高程 D′为测站点到待测点的水平距离а′为测站点到待测点的
观测垂直角从(4)可知,不同待测点的高程随着测站点到其的水平距离或观测垂直角的变化而改变。
将(3)代入(4)可知: HB′=HA+i-t+D′tanа′(5)按三角高程测量原理可知 HB′=W+D′tanа′+i′-t′ (6) 将(3)代入(6)可知: HB′=HA+i-t+D′tanа′+i′-t′ (7) 这里i′,t′为0,所以: HB′=HA+i-t+D′tanа′ (8) 由(5),(8)可知,两种方法测出的待测点高程在理论上是一致的。
也就是说我们采取这种方法进行三角高程测量是正确的。
三、三角高程测量新方法的精度对公式HB′=W +D′tanа′ (4) 全微分有:(9)令(10)(11)利用误差传播规律可以得到: m ?=??+? ? (12)伴随高新技术及电子产业的快步发展,全站仪已经实现了较高的测角和测距精度,也为这种新方法的 ___和使用提供了前提准备。
如今大量使用的全站仪测角精度为1″~6″;测边精度为±(1~5mm+2ppm*D)m.s.e。
在这里我们取最大值=6mm,=6″,D=1000m。
则有:=0.1433 ,=0.9513 ,m≈6.224mm 小于四等水准每公里中误差10mm的要求。
故可以用这种新方法代替四等水准测量。
这里须说明一下,当A与B,B与C两点之间距离较远时(一般控制在100m以内),必须考虑地球曲率和大气折光的影响,同时仪器
的垂直角不能太大(一般不超过±30°),否则也会影响三角高程测量的精度。
综上所述:将全站仪任一置点,同时不量取仪器高,棱镜高,仍然可以测出待测点的高程。
测出的结果从理论上分析比传统的三角高程测量精度更高,因为它减少了操作、仪器、环境等误差。
整个过程不必用钢尺量取仪器高,棱镜高,也就减少了这方面造成的误差。
这种新方法完全满足四等水准测量的精度,可以代替传统的用水准仪进行四等及以下的水准测量,提高了水准测量的速度、精度、灵活性和可操作性,为以后工程测量尤其是道路施工放样测量提供了一种更先进的方法。
模板,内容仅供参考。