无刷直流电机矢量控制策略与实现
- 格式:pdf
- 大小:978.75 KB
- 文档页数:6
一种基于Matlab的无刷直流电机控制系统建模仿真方法一、本文概述无刷直流电机(Brushless DC Motor, BLDC)以其高效率、低噪音、长寿命等优点,在航空航天、电动汽车、家用电器等领域得到广泛应用。
为了对无刷直流电机控制系统进行性能分析和优化,需要建立精确的数学模型并进行仿真研究。
Matlab作为一种强大的数学计算和仿真软件,为无刷直流电机控制系统的建模仿真提供了有力支持。
二、无刷直流电机控制系统原理1、无刷直流电机基本结构和工作原理无刷直流电机(Brushless Direct Current Motor,简称BLDCM)是一种基于电子换向技术的直流电机,其特点在于去除了传统直流电机中的机械换向器和电刷,从而提高了电机的运行效率和可靠性。
无刷直流电机主要由电机本体、电子换向器和功率驱动器三部分组成。
电机本体通常采用三相星形或三角形接法,其定子上分布有多个电磁铁(也称为线圈),而转子上则安装有永磁体。
当电机通电时,定子上的电磁铁会产生磁场,与转子上的永磁体产生相互作用力,从而驱动转子旋转。
电子换向器是无刷直流电机的核心部分,通常由霍尔传感器和控制器组成。
霍尔传感器安装在电机本体的定子附近,用于检测转子位置,并将位置信息传递给控制器。
控制器则根据霍尔传感器提供的位置信息,控制功率驱动器对定子上的电磁铁进行通电,从而实现电机的电子换向。
功率驱动器负责将控制器的控制信号转换为实际的电流,驱动定子上的电磁铁工作。
功率驱动器通常采用三相全桥驱动电路,具有输出电流大、驱动能力强等特点。
无刷直流电机的工作原理可以简单概括为:控制器根据霍尔传感器检测到的转子位置信息,控制功率驱动器对定子上的电磁铁进行通电,产生磁场并驱动转子旋转;随着转子的旋转,霍尔传感器不断检测新的转子位置信息,控制器根据这些信息实时调整电磁铁的通电状态,从而保持电机的连续稳定运行。
由于无刷直流电机采用电子换向技术,避免了传统直流电机中机械换向器和电刷的磨损和故障,因此具有更高的运行效率和更长的使用寿命。
电机驱动系统的性能优化与控制策略研究2.摘要:电机驱动系统的性能优化与控制策略研究"旨在提高电机驱动系统的效率和性能。
本文通过深入研究电机控制策略、性能优化方法以及集成控制与智能化应用,以提升电机驱动系统的性能。
关键词:电机驱动系统;性能优化;控制策略引言:随着科技的不断进步,电机驱动系统在工业领域中应用越来越广泛,且扮演着至关重要的角色。
然而,传统的电机驱动系统往往存在着效率低下、能耗高等问题。
因此,对电机驱动系统的性能优化和控制策略研究具有重要意义。
1、电机控制策略的研究1.1矢量控制策略矢量控制策略通过分别控制电机的磁场定向和转矩来实现高精度的运动控制。
它将三相电流转换为磁场矢量和转矩矢量,并分别控制它们以实现所需的磁场方向和输出转矩。
磁场矢量控制调节电机磁场定向,而转矩矢量控制调节电机输出转矩。
这种控制方式具有高精度、灵活适应不同工况和简化系统结构的优势,但需要测量转速和位置信息。
在矢量控制策略中,首先需要获得电机的运动状态信息,如转子位置和速度。
这可以通过传感器测量或者使用估算算法来获取。
一旦获得了运动状态信息,控制系统就可以根据所需的运动特性,通过控制电机的磁场定向和转矩来实现精确的运动控制。
1.2直接转矩控制策略与矢量控制策略不同,直接转矩控制策略无需额外的速度和位置传感器,通过实时估计电机转子位置和转速来直接控制电机转矩输出。
这种策略利用电机模型和观测器来估计内部参数,并根据所需的转矩输出调节电机电流。
直接转矩控制策略具有简单的系统结构、较低的成本和对参数变化和负载扰动的鲁棒性。
然而,它需要高计算能力和复杂的算法来估计电机状态并实时调节电流。
这些算法通常基于数学模型或者系统识别方法,以获得准确的位置和速度估计,并通过电流反馈控制来实现所需的转矩输出。
1.3智能化控制策略智能化控制策略利用人工智能技术实现自适应调节和优化控制,以提升电机系统性能。
其中,深度学习方法是一种常用的智能化控制策略。
无刷直流电机控制策略1. 定时器计数器控制定时器计数器控制是一种比较简单但常用的控制策略,其原理是通过定时器来生成不同频率的脉冲信号,从而控制电机的转速。
在BLDC电机中,通常采用六步换相的方式来控制电机的转动。
具体步骤如下:1) 初始化定时器计数器,设置好脉冲信号的频率;2) 通过对定时器计数器的计数值进行判断,确定电机当前的转动状态(即哪些相通电);3) 根据电机的转动状态,依次改变相的通断状态,实现电机的正向或反向转动。
定时器计数器控制的优点是实现简单、稳定可靠,适用于对转速要求不高的场合。
但是其缺点是对电机的控制精度较低,无法实现精确的转速和位置控制。
2. 电压脉宽调制(PWM)控制电压脉宽调制(PWM)控制是一种通过改变电机的供电电压来实现速度和位置控制的方法。
在BLDC电机中,PWM控制通常是通过改变驱动器的占空比来控制电机的转速。
具体步骤如下:1) 生成一个高频的PWM信号;2) 通过改变PWM信号的占空比,控制电机的供电电压;3) 根据电机的供电电压,控制电机的转速和位置。
PWM控制的优点是控制精度高,可以实现较精确的转速和位置控制,适用于对电机控制精度要求较高的场合。
然而,其缺点是实现复杂、成本较高。
3. 磁矢量控制磁矢量控制是一种通过检测电机磁场信息来实现对电机转速和位置控制的方法。
在BLDC 电机中,磁矢量控制通常是通过检测电机磁极位置、电流和磁场,来实现高效的转速和位置控制。
具体步骤如下:1) 通过传感器检测电机的磁场信息;2) 分析磁场信息,确定电机的转动状态;3) 根据电机的转动状态,控制电机的相序和电流,实现精确的转速和位置控制。
磁矢量控制的优点是控制精度高、效率高、噪音低,适用于对电机控制性能要求较高的场合。
然而,其缺点是实现复杂、成本高,需要增加传感器等设备。
总结以上介绍了三种常用的无刷直流电机控制策略,每种策略都有其特点和适用范围。
在实际应用中,根据具体的需求和条件选择合适的控制策略是非常重要的。
foc 直流无刷控制例程英文回答:## Field-Oriented Control (FOC) for Brushless DC Motor.Introduction.Field-Oriented Control (FOC) is a high-performance control method for brushless DC (BLDC) motors. It is based on the principle of representing the motor's magnetic field as two orthogonal components: the d-axis and q-axis. By controlling these components independently, FOC can achieve precise control of the motor's speed and torque.Benefits of FOC.Compared to traditional control methods, FOC offers several advantages:Improved efficiency.Higher torque and speed capability.Reduced torque ripple.Enhanced dynamic response.Implementation.The implementation of FOC involves the following steps:1. Current sensing: Measure the motor's phase currents using Hall sensors or other methods.2. Clark and Park transformations: Convert the phase currents into the d-q reference frame.3. PI controllers: Implement PI controllers to regulate the dand q-axis currents.4. Inverse Park transformation: Convert the controlled d-q currents back to the phase currents.5. PWM generation: Generate the PWM signals to drive the motor's power transistors.Example Code.Here is an example FOC code for a BLDC motor in C++:cpp.#include <Arduino.h>。
无刷直流电机控制技术综述一、本文概述随着科技的飞速发展和工业自动化的深入推进,无刷直流电机(Brushless DC Motor, BLDCM)控制技术日益受到广泛关注。
无刷直流电机以其高效、节能、长寿命等优点,在电动工具、电动车、航空航天、机器人等领域得到广泛应用。
本文旨在对无刷直流电机控制技术进行综述,介绍其基本原理、发展历程、主要控制策略以及未来发展趋势,以期为相关领域的研究者和工程师提供有益的参考。
本文将对无刷直流电机的基本结构和工作原理进行简要介绍,为后续的控制技术分析奠定基础。
通过回顾无刷直流电机控制技术的发展历程,揭示其从简单的开环控制到复杂的闭环控制,再到智能控制的演变过程。
接着,重点介绍几种主流的无刷直流电机控制策略,包括PID控制、模糊控制、神经网络控制等,并分析它们在不同应用场景下的优缺点。
还将探讨无刷直流电机在高速、高精度、高效率等方面的特殊控制需求及其解决方案。
本文将对无刷直流电机控制技术的未来发展趋势进行展望,包括控制算法的优化与创新、新型功率电子器件的应用、以及电机与控制系统的一体化设计等。
通过本文的综述,读者可以对无刷直流电机控制技术有一个全面而深入的了解,为相关领域的研究和实践提供有益的启示和指导。
二、无刷直流电机的基本原理与结构无刷直流电机(Brushless Direct Current,简称BLDC)是一种采用电子换向器替代传统机械换向器的直流电机。
其基本工作原理和结构与传统直流电机有所不同,因此在控制上也具有其独特之处。
基本原理:无刷直流电机的工作原理基于电子换向技术。
它利用电子开关器件(如功率晶体管或功率MOSFET)实现对电机电流的换向控制,从而改变了电机转子的旋转方向。
与传统直流电机相比,无刷直流电机省去了机械换向器和电刷,因此具有更高的运行效率和更长的使用寿命。
结构特点:无刷直流电机主要由定子、转子和电子换向器三部分组成。
定子通常由多极电磁铁构成,而转子则是一个带有永磁体的圆柱形结构。
基于foc矢量控制的无刷直流电机控制器设计文章标题:基于FOC矢量控制的无刷直流电机控制器设计探索序无刷直流电机(BLDC)在各种应用中都得到了广泛的应用,由于其高效率、低噪音和低维护要求,成为了许多行业的首选。
在BLDC电机的控制中,FOC矢量控制技术已经成为了一种重要的控制方法。
本篇文章将全面探讨基于FOC矢量控制的无刷直流电机控制器设计的相关内容,旨在帮助读者更深入地理解这一技术并应用于实际项目中。
一、FOC矢量控制技术的概述在介绍基于FOC矢量控制的无刷直流电机控制器设计之前,首先我们需要了解FOC矢量控制技术的概念和原理。
FOC矢量控制是一种通过控制电机的电流和转子磁通实现对电机的高效、精准控制的技术。
在FOC矢量控制中,通过对电机的三相电流进行精准控制,可以实现电机的高效运行,降低能耗和提高性能。
1. FOC矢量控制的基本原理在FOC矢量控制中,电机的三相电流被分解为两个独立的分量:一个是沿着磁场转子磁通方向的磁通分量,另一个是与磁场垂直的转子电流分量。
通过对这两个分量进行独立控制,可以实现对电机的高精度控制,达到最佳的运行效果。
2. FOC矢量控制的优势相较于传统的直接转矩控制(DTC)技术,FOC矢量控制具有更高的控制精度和动态响应,能够更好地适应各种工况下的控制需求,对电机能效比提升和转矩波动降低等方面有着显著的优势。
二、基于FOC矢量控制的无刷直流电机控制器设计基于FOC矢量控制的无刷直流电机控制器设计是一个复杂而又具有挑战性的工程项目。
在设计过程中,需要考虑到电机的参数识别、闭环控制算法、硬件设计等多个方面的内容。
1. 电机参数识别在进行FOC矢量控制器设计之前,首先需要对电机进行参数识别。
这包括电机的定子电感、磁通链路和电阻等参数的准确测量和识别,这些参数的准确性将直接影响到FOC矢量控制的效果。
2. 闭环控制算法针对FOC矢量控制的无刷直流电机控制器设计,闭环控制算法是非常关键的一部分。
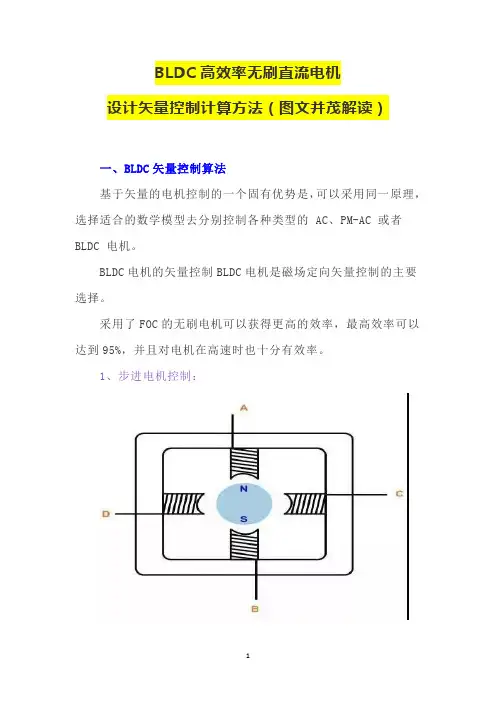
BLDC高效率无刷直流电机设计矢量控制计算方法(图文并茂解读)一、BLDC矢量控制算法基于矢量的电机控制的一个固有优势是,可以采用同一原理,选择适合的数学模型去分别控制各种类型的 AC、PM-AC 或者BLDC 电机。
BLDC电机的矢量控制BLDC电机是磁场定向矢量控制的主要选择。
采用了FOC的无刷电机可以获得更高的效率,最高效率可以达到95%,并且对电机在高速时也十分有效率。
1、步进电机控制:图7。
步进电机控制通常采用双向驱动电流,其电机步进由按顺序切换绕组来实现。
通常这种步进电机有 3 个驱动顺序:①单相全步进驱动:在这种模式中,其绕组按如下顺序加电,AB/CD/BA/DC(BA 表示绕组 AB 的加电是反方向进行的)。
这一顺序被称为单相全步进模式,或者波驱动模式。
在任何一个时间,只有一相加电。
②双相全步进驱动:在这种模式中,双相一起加电,因此,转子总是在两个极之间。
此模式被称为双相全步进,这一模式是两极电机的常态驱动顺序,可输出的扭矩最大。
③半步进模式:这种模式将单相步进和双相步进结合在一起加电:单相加电,然后双相加电,然后单相加电…,因此,电机以半步进增量运转。
这一模式被称为半步进模式,其电机每个励磁的有效步距角减少了一半,其输出的扭矩也较低。
以上3种模式均可用于反方向转动(逆时针方向),如果顺序相反则不行。
通常,步进电机具有多极,以便减小步距角,但是,绕组的数量和驱动顺序是不变的。
2、通用 DC 电机控制算法通用电机的速度控制,特别是采用 2 种电路的电机:①相角控制:相角控制是通用电机速度控制的最简单的方法。
通过 TRIAC 的点弧角的变动来控制速度。
相角控制是非常经济的解决方案,但是,效率不太高,易于电磁干扰(EMI)。
图8:通用电机的相角控制。
图8表明了相角控制的机理,是TRIAC速度控制的典型应用。
TRIAC门脉冲的周相移动产生了有效率的电压,从而产生了不同的电机速度,并且采用了过零交叉检测电路,建立了时序参考,以延迟门脉冲。
无刷直流电机的控制方法无刷直流电机的控制啊,就像是在指挥一场超级复杂的交响乐。
你看,那电机里的电流就像是一群调皮的小音符,在电路这个大乐谱里到处乱窜,而我们的控制方法呢,就是那个拿着指挥棒的大师。
要是用开环控制的方法,那就像是闭着眼睛在高速公路上开车,只知道一个劲儿地踩油门(给电压),至于电机到底转得咋样,就全靠运气啦。
这就好比你放风筝,只一股脑儿地放线,不管风筝在空中是不是要跟别的风筝打架(电机运行不稳定),完全是一种粗放型的管理。
闭环控制可就不一样啦,它就像是给电机请了个超级保姆。
这个保姆时刻盯着电机的转速、电流这些指标,就像盯着宝宝有没有好好吃饭(正常运行)一样。
一旦发现电机这个“小宝贝”转得快了或者慢了,就赶紧调整,就像宝宝哭了要赶紧哄一样迅速。
还有一种叫矢量控制的方法,这可就高大上了,就像是给电机做了个超级精确的定位导航系统。
它把电机的磁场和电流这些抽象的东西,像拆乐高积木一样,拆得清清楚楚,然后再按照最优的方式组合起来。
这就好比把一群调皮的小动物,先分清哪个是兔子,哪个是狐狸,然后再让它们排好队前进,让电机运行得又高效又精准。
要是把无刷直流电机比作一个活力四射的运动员,那控制方法就是教练。
一个好的教练(控制方法)能让运动员(电机)发挥出超强的实力。
如果是个蹩脚的教练,那电机就像没头的苍蝇,有劲使不出。
在无刷直流电机的控制世界里,控制算法就像是魔法咒语。
不同的咒语(算法)能让电机做出各种各样神奇的动作。
就像哈利·波特挥动魔杖一样,我们通过不同的控制算法,让电机按照我们的意愿转动、加速或者减速。
无刷直流电机的控制也像是一场微妙的平衡游戏。
电压、电流、转速这些参数就像走钢丝的杂技演员手里的平衡杆。
稍微有点偏差,电机就可能摔个“狗吃屎”(出现故障),所以控制方法得小心翼翼地调整这个平衡杆,让电机稳稳地在最佳状态下运行。
而且啊,控制无刷直流电机就像在驯服一匹烈马。
你不能太强硬,也不能太软弱。
知识专题:基于foc矢量控制的无刷直流电机控制器设计一、简介无刷直流电机(BLDC)是一种使用电子换向控制器而不是机械换向器来转动电机的电机类型。
它具有高效率、低噪音和长寿命等优点,因此在许多领域得到广泛应用。
而基于磁场定向控制的FOC矢量控制则是一种提高无刷直流电机性能的先进控制技术。
本文将就基于FOC矢量控制的无刷直流电机控制器设计进行深入探讨,包括其原理、设计要点以及应用场景等。
二、FOC矢量控制原理及优势FOC矢量控制是一种以矢量运算为基础的控制策略,通过对电机磁场和电流进行矢量控制,可以实现电机高效、精确的控制。
与传统的直接转矩控制(DTC)相比,FOC矢量控制具有转矩响应快、效率高、噪音小等优势,特别适用于对电机性能要求较高的场景。
三、基于FOC矢量控制的无刷直流电机控制器设计要点1. 电机参数识别:首先需准确识别电机的参数,包括电感、电阻、磁通极链系数等。
这些参数将直接影响控制器设计和性能表现。
2. 闭环控制策略:基于FOC矢量控制的无刷直流电机控制器通常采用闭环控制策略,例如PID控制。
通过精确的闭环控制,可以实现电机的精准转速和位置控制。
3. 硬件设计:控制器的硬件设计非常重要,包括功率电子器件选型、电路板布线、散热设计等。
合理的硬件设计可以提高控制器的稳定性和效率。
4. 软件算法:控制器的软件算法是FOC矢量控制的核心,其中包括空间矢量调制、换向算法、速度闭环控制等。
优秀的软件算法可以提高电机的控制精度和动态性能。
四、基于FOC矢量控制的无刷直流电机控制器应用场景1. 电动汽车:FOC矢量控制的无刷直流电机控制器在电动汽车领域有着广泛的应用。
其高效、精准的控制特性可以提高汽车的动力性能和续航里程。
2. 工业机器人:在工业机器人领域,FOC矢量控制的无刷直流电机控制器可以实现机器人的高速精度运动,提高生产效率和产品质量。
个人观点基于FOC矢量控制的无刷直流电机控制器设计是现代电机控制领域的重要研究方向,其在提高电机性能和应用领域拓展方面具有巨大潜力。
矢量控制技术在BLDC电机驱动中的应用BLDC电机,全名为无刷直流电机,因其高效、高可靠性和较少的维护需求,被广泛应用于各种领域,如电动汽车、工业自动化、家用电器等。
然而,BLDC电机控制系统的设计和实现并非易事,其中矢量控制技术就是关键之一。
什么是矢量控制技术呢?简单来说,矢量控制技术是一种将交流电动机的控制效果与直流电动机相媲美的控制方法。
它将交流电动机的定子电流分解为转矩电流和磁通电流两个互相垂直的分量,分别进行控制,从而实现对电机的精确控制。
1.提高电机启动转矩和响应速度。
由于矢量控制技术可以实现对转矩电流和磁通电流的分别控制,因此在电机启动过程中,可以通过控制转矩电流,迅速提高电机转矩,从而实现快速启动。
同时,矢量控制技术还可以提高电机的动态响应速度,使电机能够快速跟随负载变化,提高系统的稳定性和可靠性。
3.减小电机振动和噪音。
BLDC电机在运行过程中,振动和噪音主要来源于电机的电磁振动和机械振动。
矢量控制技术通过对磁通电流的控制,可以减小电机的电磁振动,从而降低电机的噪音。
同时,通过控制电机的转速和负载,可以减小电机的机械振动,进一步提高电机的运行质量和可靠性。
4.提高电机系统的适应性。
BLDC电机在实际应用中,会受到各种因素的影响,如负载变化、电源电压波动等。
矢量控制技术通过对转矩电流和磁通电流的分别控制,可以使电机具有较强的适应性,从而保证电机在各种工况下的稳定运行。
总的来说,矢量控制技术在BLDC电机驱动中的应用,不仅可以提高电机的性能,还可以提高电机系统的稳定性和可靠性,使BLDC电机在各种应用场景中都能发挥出最佳效果。
然而,矢量控制技术的实现也有一定的难度,需要具备一定的电子、电机和控制理论等方面的知识。
因此,对于矢量控制技术的研究和应用,还需要我们不断地努力和学习。
矢量控制技术在BLDC电机驱动中的应用,就好比是为电机注入了强大的“灵魂”。
它让电机不仅拥有了快速启动和响应的能力,还能在各种环境下保持高效的运行状态。
无刷直流电机矢量控制技术源码无刷直流电机矢量控制技术是一种先进的电机控制技术,具有高效、节能、精确、可靠等特点,广泛应用于电动汽车、工业自动化等领域。
本文将介绍无刷直流电机矢量控制技术的相关原理和源码实现。
无刷直流电机矢量控制是一种基于电机磁场矢量控制的技术,其原理如下:1.电机磁场分解无刷直流电机的磁场可以分解为旋转磁场和定子磁场两个分量。
旋转磁场是由永磁体或电励磁铁产生的磁场,其方向固定不变。
定子磁场由永磁体或电励磁铁产生的磁场,其方向随电机电流变化而变化。
2.电机状态转移矩阵电机状态转移矩阵是一种描述电机状态变化的数学模型,其由下列三个状态变量组成:转速、旋转磁场电流和定子磁场电流。
通过控制这些状态变量,可以实现对电机运动的精确控制。
3.矢量控制算法无刷直流电机矢量控制算法是一种基于电机状态转移矩阵实现的控制算法,其主要目的是实现对电机旋转磁场的准确控制。
该算法通过对电机状态变量进行测量和反馈控制,实现对电机输出扭矩和转速的精确控制。
下面给出一个简单的无刷直流电机矢量控制的源码实现,供参考:```#include <stdio.h>#include <stdlib.h>#include <math.h>#define pi 3.1415926535/* 无刷直流电机状态变量结构体定义 */typedef struct{float speed; // 转速float i_q; // 旋转磁场电流float i_d; // 定子磁场电流}Motor_State;/* 矢量控制算法相关变量 */Motor_State Target_State; // 目标状态Motor_State Actual_State; // 实际状态PID_Controller i_q_pid, i_d_pid; // 电流PID控制器/* 矢量控制算法函数 */void Vector_Control(Motor_State Target_State, Motor_State Actual_State){// 计算误差和积分值i_q_pid.error = Target_State.i_q - Actual_State.i_q;i_q_pid.integral += i_q_pid.error;i_d_pid.error = Target_State.i_d - Actual_State.i_d;i_d_pid.integral += i_d_pid.error;// 计算PID输出float i_q_output = i_q_pid.kp*i_q_pid.error + i_q_pid.ki*i_q_pid.integral + i_q_pid.kd*(i_q_pid.error-i_q_pid.error_last);float i_d_output = i_d_pid.kp*i_d_pid.error + i_d_pid.ki*i_d_pid.integral + i_d_pid.kd*(i_d_pid.error-i_d_pid.error_last);// 计算旋转磁场电流和定子磁场电流Actual_State.i_q = i_q_output*cos(Actual_State.speed*2*pi/60) -i_d_output*sin(Actual_State.speed*2*pi/60);Actual_State.i_d = i_d_output*cos(Actual_State.speed*2*pi/60) +i_q_output*sin(Actual_State.speed*2*pi/60);// 更新状态Actual_State.speed += (Actual_State.i_q*Target_State.i_d -Actual_State.i_d*Target_State.i_q)*pi/30;Actual_State.i_q += (i_q_output - Actual_State.i_q)*0.1;Actual_State.i_d += (i_d_output - Actual_State.i_d)*0.1;// 更新误差值i_q_pid.error_last = i_q_pid.error;i_d_pid.error_last = i_d_pid.error;}三、总结无刷直流电机矢量控制技术是一种非常实用的电机控制技术,在实际应用中能够大大提高电机的效率、稳定性和精度。
无刷直流电机控制方法无刷直流电机是一种广泛应用于各种领域的电机,它具有体积小、效率高、噪音低等优点,因此在工业生产和日常生活中得到了广泛应用。
无刷直流电机的控制方法对于其性能和稳定性有着重要影响,下面我们将介绍几种常见的无刷直流电机控制方法。
1. 电压控制方法。
电压控制方法是最简单的一种控制方法,通过调节电机的输入电压来控制电机的转速。
在实际应用中,可以通过调节PWM信号的占空比来控制电机的电压,从而实现电机的转速控制。
这种方法简单直接,但是在负载变化较大的情况下,往往无法实现良好的控制效果。
2. 脉冲宽度调制(PWM)控制方法。
脉冲宽度调制(PWM)控制方法是目前应用最广泛的一种控制方法。
通过改变PWM信号的占空比,可以控制电机的转速和转矩。
这种方法可以实现精确的电机控制,并且在负载变化较大的情况下仍能保持稳定的控制效果,因此被广泛应用于各种领域。
3. 传感器反馈控制方法。
传感器反馈控制方法是一种高级的控制方法,通过在电机上安装传感器,可以实时监测电机的转速和位置,并将反馈信息送回控制系统进行调节。
这种方法可以实现更加精准的电机控制,提高了电机的响应速度和稳定性,但是由于传感器的成本和安装调试的复杂性,使得这种方法在一些特定领域应用较多。
4. 矢量控制方法。
矢量控制方法是一种高级的控制方法,它可以实现对电机的转速、转矩和位置的精确控制。
通过对电机的电流和磁场进行精确控制,可以实现电机的高性能控制。
这种方法在一些对电机性能要求较高的领域得到了广泛应用,如电动汽车、工业机器人等。
总结。
无刷直流电机的控制方法有很多种,每种方法都有其适用的场景和特点。
在实际应用中,需要根据具体的控制要求和场景特点选择合适的控制方法,以实现对电机的精确控制,提高电机的性能和稳定性。
希望本文介绍的无刷直流电机控制方法能够对您有所帮助。
无刷直流电机调速器的设计与实现随着现代制造技术的不断提高,无刷直流电机(BLDC)的应用越来越广泛。
在许多领域,如航空、汽车、家用电器等,它们已成为必不可少的关键部件。
而一款高性能、高可靠性的BLDC 调速器则是实现BLDC应用的关键之一。
本文旨在介绍BLDC调速器的基本功能及其设计、实现方法。
1. BLDC调速器的基本功能BLDC调速器通常具备如下几个基本功能:(1)速度控制BLDC调速器主要作用是控制BLDC电机的转速。
当BLDC电机运行时,如果需要改变其转速,调速器必须通过控制BLDC电机的供电电压或频率来实现。
(2)电流控制BLDC调速器需要对BLDC电机的电流进行精确的控制。
这有助于确保电机总是在安全的工作区域范围内运行,并且可以提升电机的效率和寿命。
(3)保护控制BLDC调速器还需要具备多种保护控制功能,例如过载保护、过压保护、欠压保护、过热保护等。
这些保护控制功能旨在保障BLDC电机及其周边设备在安全的运行状态下工作。
2. BLDC调速器的设计BLDC调速器的设计主要包括以下几个方面:(1)控制策略BLDC调速器的控制策略有许多种设计方案。
目前主要有传统的定向控制和矢量控制两种。
在定向控制中,控制器通常使用霍尔传感器获取电机的位置信息,并通过控制电机的电压和频率,来控制其转速。
而在矢量控制中,控制器不仅可以获取电机的位置信息,还可以通过反馈控制器的输出来实现电机速度和电流的闭环控制。
(2)功率开关器BLDC调速器需要一个功率开关器来控制电机的供电电压和频率。
现在主流的功率开关器包括IGBT、MOSFET等。
在选择功率开关器时,需要考虑功率开关器的特性参数,如开关频率、导通电阻、损耗等。
(3)电机驱动电路BLDC电机需要一个驱动电路来控制其电流。
现在主流的驱动电路包括三种:电压型、电流型和矢量型。
在选择电机驱动电路时,需要考虑驱动器的性能指标,如峰值电流、动态响应等。
3. BLDC调速器的实现实现BLDC调速器需要多种硬件和软件支持。
广州周立功单片机科技有限公司ZLG 精选微信文章分享TN01010101V0.00Date:2016/08/01无刷直流电机的控制算法类别内容关键词电机控制FOC 矢量变频摘要无刷电机相比有刷电机控制起来比较复杂。
可分为有感和无感控制,无论是哪种控制方式,目的都是为了获取转子的位置,然后精确换向,这样才能保证电机达到较高转速,且能保证了无刷电机起动的可靠性。
Technical Note无刷直流电机的控制算法摘要:无刷电机相比有刷电机控制起来比较复杂。
可分为有感和无感控制,无论是哪种控制方式,目的都是为了获取转子的位置,然后精确换向,这样才能保证电机达到较高转速,且能保证了无刷电机起动的可靠性推送目的:介绍无刷直流电机控制技术。
是否原创:否原文链接/forum.php?mod=viewthread&tid=285关键字:电机控制FOC矢量变频正文:图1封面图(三相直流无刷电机)无刷电机相比有刷电机控制起来比较复杂。
可分为有感和无感控制,无论是哪种控制方式,目的都是为了获取转子的位置,然后精确换向,这样才能保证电机达到较高转速,且能保证了无刷电机起动的可靠性。
关键词电机控制FOC矢量变频概述随着电力电子技术、微处理器以及现代控制理论的发展,无刷直流电机控制方案也逐渐用电子换相和复杂的控制算法代替机械电刷和换相器控制的方案,先进的控制方案既具备交流电动机的结构简单、运行可靠、维护方便等一系列优点,又具备直流电动机的运行效率高、调速性能好等诸多优点,同时克服了有刷直流电机由机械电刷带来的噪声、火花、无线电干扰以及寿命短的弊病。
下面就让我们介绍常用无刷直流电机控制方法。
1.控制算法许多不同的控制算法都被用以提供对于BLDC电机的控制。
典型地,将功率晶体管用作线性稳压器来控制电机电压。
当驱动高功率电机时,这种方法并不实用。
高功率电机必须采用PWM控制,并要求一个微控制器来提供起动和控制功能。
控制算法必须提供下列三项功能:∙用于控制电机速度的PWM电压;∙用于对电机进整流换向的机制;∙利用反电动势或霍尔传感器来预测转子位置的方法。