新型两相无刷直流电机矢量控制系统
- 格式:pdf
- 大小:803.69 KB
- 文档页数:5
直流无刷电机的foc控制原理直流无刷电机(BLDC)的矢量控制通常采用场向量控制(Field Oriented Control,FOC)技术。
FOC 控制可以通过控制电机的磁场方向和大小,以实现更高的效率和性能。
以下是直流无刷电机 FOC 控制的基本原理:
坐标变换:FOC 控制首先将电机的三相电流转换到两个坐标系下:静止坐标系(通常是 abc 坐标系)和转子坐标系(通常是 dq 坐标系)。
dq 坐标系转换:在 dq 坐标系中,d 轴(直流轴)与电机的磁通量方向保持一致,q 轴(正交轴)与磁场垂直。
这种变换可以简化电机的控制,因为电机的磁通量和转矩只与 d 轴电流有关,而与q 轴电流无关。
磁通量和转矩控制:在 dq 坐标系下,可以独立控制 d 轴电流和 q 轴电流。
通过控制 d 轴电流来控制电机的磁通量,通过控制q 轴电流来控制电机的转矩。
这样就可以实现对电机磁通量和转矩的精确控制。
转子位置估算:FOC 控制需要知道转子的位置信息才能进行有效的控制。
通常,这需要使用传感器(如编码器)来获取准确的转子位置信息,或者采用无传感器的方法来估算转子位置(如反电动势法或者观测器法)。
闭环控制:通常情况下,FOC 控制是以闭环方式实现的,通过反馈转子位置信息和电流信息来调节控制算法,以确保电机可以跟
踪给定的磁通量和转矩指令。
总的来说,FOC 控制通过将电机的控制问题简化到一个二维空间中(d 轴和 q 轴),从而实现对电机磁通量和转矩的精确控制,从而提高了电机的效率和性能。
![一种无刷直流电机矢量控制系统及其构建方法[发明专利]](https://uimg.taocdn.com/ebeb773d50e2524de4187ed8.webp)
专利名称:一种无刷直流电机矢量控制系统及其构建方法专利类型:发明专利
发明人:李瑶,王易钱,李德军,魏建宏,李玉鹏
申请号:CN201810541010.4
申请日:20180530
公开号:CN108718164A
公开日:
20181030
专利内容由知识产权出版社提供
摘要:本发明涉及一种无刷直流电机矢量控制系统及其构建方法,所述无刷直流电机矢量控制系统包括:双闭环调节器、SVPWM控制器和逆变器;其中所述双闭环调节器包括转速调节外环和电流调节内环,且所述转速调节外环的转速调节器适于采用模糊神经网络控制器;一给定转速经所述双闭环调节器调节后输入至所述SVPWM控制器;以及所述SVPWM控制器适于产生控制脉冲信号,并通过所述逆变器逆变后作为无刷直流电机的控制信号;本发明的无刷直流电机矢量控制系统在传统的控制方法基础上引入了模糊神经网络,提高了系统的稳定性,增加了系统的自适应性能。
申请人:常州兰陵自动化设备有限公司
地址:213000 江苏省常州市新北区新科路11号
国籍:CN
更多信息请下载全文后查看。
基于foc矢量控制的无刷直流电机控制器设计文章标题:基于FOC矢量控制的无刷直流电机控制器设计探索序无刷直流电机(BLDC)在各种应用中都得到了广泛的应用,由于其高效率、低噪音和低维护要求,成为了许多行业的首选。
在BLDC电机的控制中,FOC矢量控制技术已经成为了一种重要的控制方法。
本篇文章将全面探讨基于FOC矢量控制的无刷直流电机控制器设计的相关内容,旨在帮助读者更深入地理解这一技术并应用于实际项目中。
一、FOC矢量控制技术的概述在介绍基于FOC矢量控制的无刷直流电机控制器设计之前,首先我们需要了解FOC矢量控制技术的概念和原理。
FOC矢量控制是一种通过控制电机的电流和转子磁通实现对电机的高效、精准控制的技术。
在FOC矢量控制中,通过对电机的三相电流进行精准控制,可以实现电机的高效运行,降低能耗和提高性能。
1. FOC矢量控制的基本原理在FOC矢量控制中,电机的三相电流被分解为两个独立的分量:一个是沿着磁场转子磁通方向的磁通分量,另一个是与磁场垂直的转子电流分量。
通过对这两个分量进行独立控制,可以实现对电机的高精度控制,达到最佳的运行效果。
2. FOC矢量控制的优势相较于传统的直接转矩控制(DTC)技术,FOC矢量控制具有更高的控制精度和动态响应,能够更好地适应各种工况下的控制需求,对电机能效比提升和转矩波动降低等方面有着显著的优势。
二、基于FOC矢量控制的无刷直流电机控制器设计基于FOC矢量控制的无刷直流电机控制器设计是一个复杂而又具有挑战性的工程项目。
在设计过程中,需要考虑到电机的参数识别、闭环控制算法、硬件设计等多个方面的内容。
1. 电机参数识别在进行FOC矢量控制器设计之前,首先需要对电机进行参数识别。
这包括电机的定子电感、磁通链路和电阻等参数的准确测量和识别,这些参数的准确性将直接影响到FOC矢量控制的效果。
2. 闭环控制算法针对FOC矢量控制的无刷直流电机控制器设计,闭环控制算法是非常关键的一部分。
BLDC高效率无刷直流电机设计矢量控制计算方法(图文并茂解读)一、BLDC矢量控制算法基于矢量的电机控制的一个固有优势是,可以采用同一原理,选择适合的数学模型去分别控制各种类型的 AC、PM-AC 或者BLDC 电机。
BLDC电机的矢量控制BLDC电机是磁场定向矢量控制的主要选择。
采用了FOC的无刷电机可以获得更高的效率,最高效率可以达到95%,并且对电机在高速时也十分有效率。
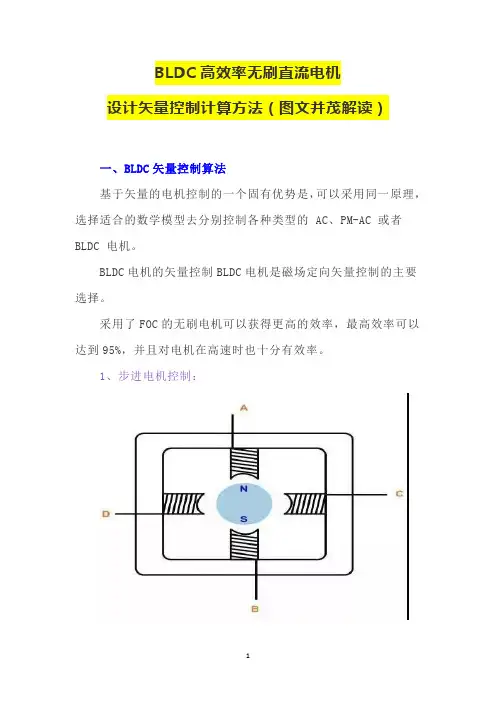
1、步进电机控制:图7。
步进电机控制通常采用双向驱动电流,其电机步进由按顺序切换绕组来实现。
通常这种步进电机有 3 个驱动顺序:①单相全步进驱动:在这种模式中,其绕组按如下顺序加电,AB/CD/BA/DC(BA 表示绕组 AB 的加电是反方向进行的)。
这一顺序被称为单相全步进模式,或者波驱动模式。
在任何一个时间,只有一相加电。
②双相全步进驱动:在这种模式中,双相一起加电,因此,转子总是在两个极之间。
此模式被称为双相全步进,这一模式是两极电机的常态驱动顺序,可输出的扭矩最大。
③半步进模式:这种模式将单相步进和双相步进结合在一起加电:单相加电,然后双相加电,然后单相加电…,因此,电机以半步进增量运转。
这一模式被称为半步进模式,其电机每个励磁的有效步距角减少了一半,其输出的扭矩也较低。
以上3种模式均可用于反方向转动(逆时针方向),如果顺序相反则不行。
通常,步进电机具有多极,以便减小步距角,但是,绕组的数量和驱动顺序是不变的。
2、通用 DC 电机控制算法通用电机的速度控制,特别是采用 2 种电路的电机:①相角控制:相角控制是通用电机速度控制的最简单的方法。
通过 TRIAC 的点弧角的变动来控制速度。
相角控制是非常经济的解决方案,但是,效率不太高,易于电磁干扰(EMI)。
图8:通用电机的相角控制。
图8表明了相角控制的机理,是TRIAC速度控制的典型应用。
TRIAC门脉冲的周相移动产生了有效率的电压,从而产生了不同的电机速度,并且采用了过零交叉检测电路,建立了时序参考,以延迟门脉冲。
无刷电机矢量控制原理无刷电机是一种采用电子换相方式来实现转子转动的电机,相比传统的有刷电机,无刷电机具有结构简单、可靠性高、效率高的优点。
而无刷电机的矢量控制则是一种先进的控制方法,可以实现电机速度和转矩的精确控制。
无刷电机的矢量控制原理基于电机的电磁方程和空间矢量调制理论,通过采样电机的转子位置和电流信息,实时计算出电机所处的转子位置和转速,并根据控制指令和电机的工作状态,调整电机的相电流大小和相位角,实现对电机的精确控制。
具体而言,无刷电机的矢量控制可以分为两个主要部分:速度闭环控制和电流闭环控制。
在速度闭环控制中,通过采样电机的转子位置和电流信息,计算出电机的转速和位置。
然后,将期望转速和实际转速进行比较,得到速度误差。
根据速度误差,通过调整电机的电流大小和相位角,控制电机的转速接近期望转速。
这一过程可以使用PID控制器来实现,通过调整PID参数,可以实现电机速度的精确控制。
在电流闭环控制中,通过采样电机的电流信息,计算出电机的电流大小和相位角。
然后,将期望电流和实际电流进行比较,得到电流误差。
根据电流误差,通过调整电机的电压大小和相位角,控制电机的电流接近期望电流。
这一过程也可以使用PID控制器来实现,通过调整PID参数,可以实现电机转矩的精确控制。
无刷电机的矢量控制还可以实现其他功能,如位置控制和转矩控制。
在位置控制中,通过采样电机的转子位置和电流信息,计算出电机的位置误差。
然后,根据位置误差,通过调整电机的电流大小和相位角,控制电机的位置接近期望位置。
在转矩控制中,可以通过调整电机的电流大小和相位角,实现对电机转矩的精确控制。
无刷电机的矢量控制原理是一种先进的电机控制方法,通过采样电机的转子位置和电流信息,实时计算出电机所处的转子位置和转速,并根据控制指令和电机的工作状态,调整电机的相电流大小和相位角,实现对电机的精确控制。
通过矢量控制,可以实现电机速度、位置和转矩的精确控制,提高电机的性能和效率。
知识专题:基于foc矢量控制的无刷直流电机控制器设计一、简介无刷直流电机(BLDC)是一种使用电子换向控制器而不是机械换向器来转动电机的电机类型。
它具有高效率、低噪音和长寿命等优点,因此在许多领域得到广泛应用。
而基于磁场定向控制的FOC矢量控制则是一种提高无刷直流电机性能的先进控制技术。
本文将就基于FOC矢量控制的无刷直流电机控制器设计进行深入探讨,包括其原理、设计要点以及应用场景等。
二、FOC矢量控制原理及优势FOC矢量控制是一种以矢量运算为基础的控制策略,通过对电机磁场和电流进行矢量控制,可以实现电机高效、精确的控制。
与传统的直接转矩控制(DTC)相比,FOC矢量控制具有转矩响应快、效率高、噪音小等优势,特别适用于对电机性能要求较高的场景。
三、基于FOC矢量控制的无刷直流电机控制器设计要点1. 电机参数识别:首先需准确识别电机的参数,包括电感、电阻、磁通极链系数等。
这些参数将直接影响控制器设计和性能表现。
2. 闭环控制策略:基于FOC矢量控制的无刷直流电机控制器通常采用闭环控制策略,例如PID控制。
通过精确的闭环控制,可以实现电机的精准转速和位置控制。
3. 硬件设计:控制器的硬件设计非常重要,包括功率电子器件选型、电路板布线、散热设计等。
合理的硬件设计可以提高控制器的稳定性和效率。
4. 软件算法:控制器的软件算法是FOC矢量控制的核心,其中包括空间矢量调制、换向算法、速度闭环控制等。
优秀的软件算法可以提高电机的控制精度和动态性能。
四、基于FOC矢量控制的无刷直流电机控制器应用场景1. 电动汽车:FOC矢量控制的无刷直流电机控制器在电动汽车领域有着广泛的应用。
其高效、精准的控制特性可以提高汽车的动力性能和续航里程。
2. 工业机器人:在工业机器人领域,FOC矢量控制的无刷直流电机控制器可以实现机器人的高速精度运动,提高生产效率和产品质量。
个人观点基于FOC矢量控制的无刷直流电机控制器设计是现代电机控制领域的重要研究方向,其在提高电机性能和应用领域拓展方面具有巨大潜力。
矢量控制技术在BLDC电机驱动中的应用BLDC电机,全名为无刷直流电机,因其高效、高可靠性和较少的维护需求,被广泛应用于各种领域,如电动汽车、工业自动化、家用电器等。
然而,BLDC电机控制系统的设计和实现并非易事,其中矢量控制技术就是关键之一。
什么是矢量控制技术呢?简单来说,矢量控制技术是一种将交流电动机的控制效果与直流电动机相媲美的控制方法。
它将交流电动机的定子电流分解为转矩电流和磁通电流两个互相垂直的分量,分别进行控制,从而实现对电机的精确控制。
1.提高电机启动转矩和响应速度。
由于矢量控制技术可以实现对转矩电流和磁通电流的分别控制,因此在电机启动过程中,可以通过控制转矩电流,迅速提高电机转矩,从而实现快速启动。
同时,矢量控制技术还可以提高电机的动态响应速度,使电机能够快速跟随负载变化,提高系统的稳定性和可靠性。
3.减小电机振动和噪音。
BLDC电机在运行过程中,振动和噪音主要来源于电机的电磁振动和机械振动。
矢量控制技术通过对磁通电流的控制,可以减小电机的电磁振动,从而降低电机的噪音。
同时,通过控制电机的转速和负载,可以减小电机的机械振动,进一步提高电机的运行质量和可靠性。
4.提高电机系统的适应性。
BLDC电机在实际应用中,会受到各种因素的影响,如负载变化、电源电压波动等。
矢量控制技术通过对转矩电流和磁通电流的分别控制,可以使电机具有较强的适应性,从而保证电机在各种工况下的稳定运行。
总的来说,矢量控制技术在BLDC电机驱动中的应用,不仅可以提高电机的性能,还可以提高电机系统的稳定性和可靠性,使BLDC电机在各种应用场景中都能发挥出最佳效果。
然而,矢量控制技术的实现也有一定的难度,需要具备一定的电子、电机和控制理论等方面的知识。
因此,对于矢量控制技术的研究和应用,还需要我们不断地努力和学习。
矢量控制技术在BLDC电机驱动中的应用,就好比是为电机注入了强大的“灵魂”。
它让电机不仅拥有了快速启动和响应的能力,还能在各种环境下保持高效的运行状态。
无刷直流电机矢量控制技术1. 引言无刷直流电机(Brushless DC Motor, BLDC)是一种由于无刷电机使用先进的电子技术而获得广泛应用的直流电机。
传统的有刷直流电机由于刷子的摩擦和损耗等问题,逐渐被无刷直流电机所替代。
无刷直流电机矢量控制技术是一种先进的电机控制技术,能够实现对电机转矩和转速的精确控制。
本文将深入探讨无刷直流电机矢量控制技术的原理、应用和相关源码实现。
2. 无刷直流电机矢量控制原理无刷直流电机矢量控制技术是基于空间矢量变换理论,通过调节电机绕组的电流大小和方向来控制电机的输出转矩和转速。
2.1 空间矢量变换的原理空间矢量变换是一种将三相交流电转换成矢量形式进行运算的方法。
对于无刷直流电机来说,将三相交流电转换成矢量形式后,可以根据电机的电磁特性进行控制。
2.2 电机矢量控制的基本原理电机矢量控制的基本原理是通过分别控制直流电机的磁场和转子的旋转磁场,实现对电机的转矩和转速的精确控制。
具体来说,通过改变电机绕组中的电流大小和方向,可以改变电机磁场的大小和方向,从而实现对转矩和转速的控制。
2.3 无刷直流电机矢量控制的步骤无刷直流电机矢量控制的步骤包括:电流测量、矢量变量计算、电流控制和转矩控制等。
3. 无刷直流电机矢量控制的应用无刷直流电机矢量控制技术在工业控制和自动化领域具有广泛的应用。
以下是该技术的几个常见应用场景:3.1 电动汽车在电动汽车中,无刷直流电机矢量控制技术被广泛应用于电动车辆的动力系统中。
通过矢量控制技术,可以精确控制电动车辆的加速度、制动力和转向性能,提高电动汽车的驾驶性能和能源利用率。
3.2 工业机械在工业机械领域,无刷直流电机矢量控制技术可以应用于各种需要精确控制转矩和转速的场景。
例如,机械加工、运输设备和机器人等。
通过矢量控制技术,可以实现对机械设备的高效、精确和稳定的控制。
3.3 家电产品无刷直流电机矢量控制技术在家电产品中也具有重要应用。
无刷直流电机矢量控制技术源码无刷直流电机矢量控制技术是一种应用于无刷直流电机的高级控制方法,通过对电机的电流和电压进行精确控制,实现对电机的高效运行。
本文将介绍无刷直流电机矢量控制技术的原理和应用,并探讨其在工业自动化领域中的重要性。
无刷直流电机是一种常见的电机类型,其具有高效率、高可靠性和长寿命等优点,广泛应用于工业、交通和家用电器等领域。
传统的无刷直流电机控制方法主要是基于电流环控制,即通过控制电机的电流大小和方向来实现对电机的控制。
然而,这种控制方法存在一些问题,如控制精度低、动态响应慢等。
无刷直流电机矢量控制技术通过对电机的电流和电压进行独立控制,实现对电机的精确控制。
具体来说,矢量控制技术将电机的电流和电压分解为直流分量和交流分量,并通过调节交流分量的大小和相位,实现对电机的转矩和转速精确控制。
这种控制方法可以提高电机的控制精度和动态响应速度,降低电机的能耗和噪音。
无刷直流电机矢量控制技术的核心是电机的模型建立和参数估计。
通过对电机的数学模型进行建立和参数估计,可以准确地描述电机的动态特性和控制特性。
在实际应用中,可以使用PID控制器或模糊控制器来实现对电机的矢量控制。
PID控制器通过不断调节电机的电流和电压,使得电机的转矩和转速达到预期值。
模糊控制器则通过模糊逻辑判断和模糊推理,实现对电机的精确控制。
无刷直流电机矢量控制技术在工业自动化领域中具有广泛的应用。
首先,矢量控制技术可以提高电机的控制精度和动态响应速度,适用于对转矩和转速要求较高的应用场景,如机床加工、印刷设备和搬运设备等。
其次,矢量控制技术可以降低电机的能耗和噪音,提高工作效率和舒适性,适用于对能耗和噪音有严格要求的应用场景,如电动汽车、空调系统和风力发电机组等。
无刷直流电机矢量控制技术是一种高级的电机控制方法,通过对电机的电流和电压进行精确控制,实现对电机的高效运行。
该技术具有控制精度高、动态响应快、能耗低、噪音小等优点,在工业自动化领域中具有广泛的应用前景。
![无刷直流电动机电压矢量控制装置[实用新型专利]](https://uimg.taocdn.com/f43cb15969dc5022abea00aa.webp)
专利名称:无刷直流电动机电压矢量控制装置专利类型:实用新型专利
发明人:张东宁,王思远,戴亮,于淼
申请号:CN201420860143.5
申请日:20141225
公开号:CN204376796U
公开日:
20150603
专利内容由知识产权出版社提供
摘要:本实用新型提供一种无刷直流电动机电压矢量控制装置,用于实施无刷直流电动机电压矢量控制方法,其包括:第一开关器件至第六开关器件,用于分别构成电动机U相、V相和W相驱动电路的上桥或下桥;位置检测装置,用于检测电动机转子的位置;开关逻辑电路,与所述位置检测装置连接,用于根据转子的位置检测结果,对于第一开关器件至第六开关器件进行相应的开关逻辑控制。
借此,本实用新型可以实现矢量切换时,只有一个开关进行开通或关断,从而避免6步法中出现的“同时开通一个开关器件并关闭一个开关器件”的问题,减少关断电流和换向损失。
申请人:中国电子科技集团公司第二十一研究所
地址:200233 上海市徐汇区虹漕路30号
国籍:CN
代理机构:北京五洲洋和知识产权代理事务所(普通合伙)
代理人:刘春成
更多信息请下载全文后查看。
无刷直流电机矢量控制技术源码无刷直流电机矢量控制技术是一种先进的电机控制技术,具有高效、节能、精确、可靠等特点,广泛应用于电动汽车、工业自动化等领域。
本文将介绍无刷直流电机矢量控制技术的相关原理和源码实现。
无刷直流电机矢量控制是一种基于电机磁场矢量控制的技术,其原理如下:1.电机磁场分解无刷直流电机的磁场可以分解为旋转磁场和定子磁场两个分量。
旋转磁场是由永磁体或电励磁铁产生的磁场,其方向固定不变。
定子磁场由永磁体或电励磁铁产生的磁场,其方向随电机电流变化而变化。
2.电机状态转移矩阵电机状态转移矩阵是一种描述电机状态变化的数学模型,其由下列三个状态变量组成:转速、旋转磁场电流和定子磁场电流。
通过控制这些状态变量,可以实现对电机运动的精确控制。
3.矢量控制算法无刷直流电机矢量控制算法是一种基于电机状态转移矩阵实现的控制算法,其主要目的是实现对电机旋转磁场的准确控制。
该算法通过对电机状态变量进行测量和反馈控制,实现对电机输出扭矩和转速的精确控制。
下面给出一个简单的无刷直流电机矢量控制的源码实现,供参考:```#include <stdio.h>#include <stdlib.h>#include <math.h>#define pi 3.1415926535/* 无刷直流电机状态变量结构体定义 */typedef struct{float speed; // 转速float i_q; // 旋转磁场电流float i_d; // 定子磁场电流}Motor_State;/* 矢量控制算法相关变量 */Motor_State Target_State; // 目标状态Motor_State Actual_State; // 实际状态PID_Controller i_q_pid, i_d_pid; // 电流PID控制器/* 矢量控制算法函数 */void Vector_Control(Motor_State Target_State, Motor_State Actual_State){// 计算误差和积分值i_q_pid.error = Target_State.i_q - Actual_State.i_q;i_q_pid.integral += i_q_pid.error;i_d_pid.error = Target_State.i_d - Actual_State.i_d;i_d_pid.integral += i_d_pid.error;// 计算PID输出float i_q_output = i_q_pid.kp*i_q_pid.error + i_q_pid.ki*i_q_pid.integral + i_q_pid.kd*(i_q_pid.error-i_q_pid.error_last);float i_d_output = i_d_pid.kp*i_d_pid.error + i_d_pid.ki*i_d_pid.integral + i_d_pid.kd*(i_d_pid.error-i_d_pid.error_last);// 计算旋转磁场电流和定子磁场电流Actual_State.i_q = i_q_output*cos(Actual_State.speed*2*pi/60) -i_d_output*sin(Actual_State.speed*2*pi/60);Actual_State.i_d = i_d_output*cos(Actual_State.speed*2*pi/60) +i_q_output*sin(Actual_State.speed*2*pi/60);// 更新状态Actual_State.speed += (Actual_State.i_q*Target_State.i_d -Actual_State.i_d*Target_State.i_q)*pi/30;Actual_State.i_q += (i_q_output - Actual_State.i_q)*0.1;Actual_State.i_d += (i_d_output - Actual_State.i_d)*0.1;// 更新误差值i_q_pid.error_last = i_q_pid.error;i_d_pid.error_last = i_d_pid.error;}三、总结无刷直流电机矢量控制技术是一种非常实用的电机控制技术,在实际应用中能够大大提高电机的效率、稳定性和精度。
相步进电机矢量控制
两相步进电机矢量控制(Two-Phase Stepper Motor Vector Control)是一种用于控制两相步进电机的驱动技术,它模仿了异步电动机矢量控制的方法。
这种控制技术可以使步进电机在运行时更加平滑、响应更快,并且能够提供更好的速度和位置控制。
在两相步进电机中,通常会有一个主相和一个副相,每个相都有相应的绕组和电流。
矢量控制通过将这两个相的电流分解为磁场的成分和转矩的成分,从而实现对电机行为的精细控制。
具体来说,矢量控制包括以下几个步骤:
1. 坐标变换:为了实现矢量控制,首先需要将静止坐标系(abc坐标系)转换为旋转坐标系(αβ坐标系),这通常是通过Clarke变换和Park变换来完成的。
2. 磁场定向控制:通过上述变换,可以将电机的电流分解为磁场的成分(Iα)和转矩的成分(Iβ)。
然后,控制器可以分别控制这两个成分,以便在旋转坐标系中实现对磁场的控制。
3. 控制器设计:设计电流控制器来调节主相和副相的电流,使得磁场方向和大小得到优化。
此外,还可以设计速度和位置控制器来进一步改善电机的动态和静态性能。
4. 反馈和调节:在实际应用中,需要通过位置反馈来调节速度控制器,以实现精确的位置控制。
同时,通过电流反馈来调节电流控制器,以保证电机运行在稳定状态。
矢量控制技术可以使两相步进电机在复杂的工作环境下表现得更像同步电机,从而提高了电机的性能和控制精度。
这种控制技术在精密定位、速度控制和负载适应性方面具有显著优势,因此在工业自动化、机器人技术和精密仪器等领域得到了广泛应用。
无刷直流电机矢量控制技术一、引言无刷直流电机(BLDC)在工业生产和家用电器中都有广泛应用,而矢量控制技术是BLDC控制的重要方法之一。
本文将详细介绍无刷直流电机矢量控制技术的原理、实现方法以及应用场景。
二、无刷直流电机简介无刷直流电机是一种基于永磁体和交变电源的转子驱动器,其结构与传统的有刷直流电机不同。
BLDC具有高效、低噪音、长寿命等优点,在许多领域都有广泛应用。
三、矢量控制原理矢量控制是一种高级的BLDC控制方法,它充分利用了BLDC结构中的永磁体,通过对永磁体和转子位置进行精确测量和计算,实现对转子位置和速度的精确控制。
1. 空间矢量理论空间矢量理论是BLDC矢量控制中最基本的理论之一。
它将三相交流信号表示成一个旋转向量,在不同时间点上旋转不同角度,从而实现对BLDC驱动器输出信号的精确调节。
2. 磁场定向控制磁场定向控制是BLDC矢量控制中的另一个重要理论。
它通过对BLDC中的永磁体和转子位置进行精确测量和计算,实现对转子位置和速度的精确控制。
四、矢量控制实现方法BLDC矢量控制有多种实现方法,其中最常见的是基于DSP芯片的数字式矢量控制。
下面将介绍数字式矢量控制的实现方法。
1. 传感器信号采集数字式矢量控制需要采集BLDC驱动器中的多个信号,包括电流、电压、角度等。
这些信号需要通过传感器进行采集,并通过AD转换器将模拟信号转换为数字信号。
2. 控制算法设计数字式矢量控制需要设计一套高效稳定的控制算法,以实现对BLDC 驱动器输出信号的精确调节。
这些算法包括PID算法、FOC算法等。
3. DSP芯片编程DSP芯片是数字式矢量控制中最重要的组成部分之一。
它需要编写相应的程序代码,以实现对BLDC驱动器输出信号的精确调节。
五、应用场景BLDC矢量控制技术在许多领域都有广泛应用,包括工业生产、家用电器、电动车等。
下面将介绍BLDC矢量控制在电动车中的应用。
1. 电动车驱动系统BLDC矢量控制技术可以应用于电动车驱动系统中,通过对BLDC驱动器输出信号的精确调节,实现对电动车速度和转向的精确控制。