智能网联汽车技术基础最新版课件-项目八 先进驾驶辅助系统
- 格式:pptx
- 大小:2.17 MB
- 文档页数:88


智能网联汽车的技术架构ZHINENGWANGLIANQICHEDEJISHUJIAGOU项目八智能网联汽车的技术架构联汽车是指搭载先进的车载传感器、控制器、执智能网联汽车是指搭载先进的车载传感器、控制器、执智能网行器等装置,并融合现代通信与网络技术,实现车与X X行器等装置,并融合现代通信与网络技术,实现车与(车、路、人、云端等)智能信息交换、共享,具备复杂环境感知、智能决策、协同控制等功能,可实现“安全、高效、舒适、节能”行驶,并最终可实现替代人来操作的新一代汽车。
联汽车包括智能化与网联化两个技术层面,其分智能网智能网联汽车包括智能化与网联化两个技术层面,其分级也可对应地按照智能化与网联化两个层面区分。
任务一智能网联汽车智能化等级概述智能汽车的智能化等级分为自动驾驶等级和网联化等级2个方面。
根据节能与新能源汽车技术路线图战略咨询委员会、中国汽车工程学会发布的资料,自动驾驶等级定义,见表8-1。
驾驶为3级以上时,由自动驾驶系统监控驾驶环境,当3级自动驾驶在系统失效时,要求自动驾驶为自动驾驶员接管车辆的控制;44级自动驾驶系统失效时,系统对驾驶员提出响应请求,驾驶员也可以驾驶员接管车辆的控制;不响应。
33级和4级自动驾驶在法律上都要求界定机器驾驶和驾驶员驾驶的责任。
级自动驾驶在法律上都要求界定机器驾驶和驾驶员驾驶的责任。
55级自动驾驶不响应。
完成为最高级别的自动驾驶,驾驶操作的控制、监控和失效应对都由机器完成为最高级别的自动驾驶,驾驶操作的控制、监控和失效应对都由机器任务二智能网联汽车技术体系架构及其控制系统1.智能汽车技术体系架构智能网联汽车除了依靠本车的物理传感器联汽车除了依靠本车的物理传感器智能网实现周边状态的感知外,还能够通过V2X),vehicleV2V),vehicle tovehicle((vehicle to vehicle(V2Vetc.)通信技术在更大)通信技术在更大),etc.infrastructure(V2I),infrastructure(V2I的空间尺度上扩展环境和交通状况的感知范围。


智能网联汽车技术课件智能网联汽车是一种前瞻性技术,它的出现使得传统的机械式汽车和现代信息技术相结合,从而实现车与车、车与人、车与环境之间的互联互通。
智能网联汽车不仅能够提高交通效率,缓解交通拥堵,同时也能提高驾驶安全,降低驾驶员的疲劳程度和事故率。
本课件将全面介绍智能网联汽车技术,包括其基本原理、应用场景、研发趋势等方面。
智能网联汽车技术需要借助于多种通信技术,包括移动通信、卫星导航、短距离通信等。
通过这些通信技术,智能网联汽车能够实现车与车之间的互相通信,也能实现车与基础设施之间的通信。
在车辆内部,智能网联汽车通过多种传感器收集车辆内部和周边环境的信息,包括车速、路况、天气等。
这些信息通过通信网络传输,并经过处理和分析,在汽车内部得出最优的驾驶方案。
1.智能驾驶:智能驾驶是智能网联汽车技术的核心应用之一,是指车辆的智能自动驾驶系统。
智能驾驶系统可以通过车内和车外的传感器获取车辆和道路的信息,然后计算出最优的驾驶方案。
目前,国内外的汽车厂商正在大力研发智能驾驶技术,以满足用户对于更加安全、自由的驾驶需求。
2.车联网:车联网是指车辆与互联网之间的连接,通过车内的通信设备和互联网通信,在车内获取更多的信息资源。
车联网可以通过提供实时信息、导航服务、娱乐和音乐等,提升车载用户体验。
3.智能交通:智能交通是指通过智能网联技术,实现道路、交通、车辆信息的交互,以便更加高效地管理和运营交通系统。
智能交通可以提高交通效率,缓解交通拥堵,减少车辆排放,更好地管理道路和交通。
1.智能驾驶和可靠性的提升:智能驾驶是智能网联汽车技术的核心,随着技术的不断发展,汽车可以自主驾驶的能力将不断提高。
2.人工智能和车辆交互:随着人工智能技术的进步,智能网联汽车将不仅仅是一个自动驾驶的工具,更可以成为人类生活的智能助手。
比如,深度学习技术可以识别驾驶员的情绪和行为,车辆可以提供个性化的驾驶建议,更好地服务用户。
3.多元化的应用场景:智能网联汽车不仅仅局限于道路交通,例如智能网联水上交通、智慧物流等,智能网联汽车的应用场景已经开始被拓展到更多的领域。
断开整车控制器线束连接器和倒车雷达控制器(泊车辅助模块)线束连接器。
按照表7检测电路,如果不符合表内应测得电阻1Ω结果,那么应该更换维修或更换线束。
如果电阻值符合检测标准,故障还是“整车控制器VCU 档位信号丢失”,那么这时候应检查整车控制器的供电接地导线,如果接地正常,那么可以判定故障是整车控制器,更换整车控制器。
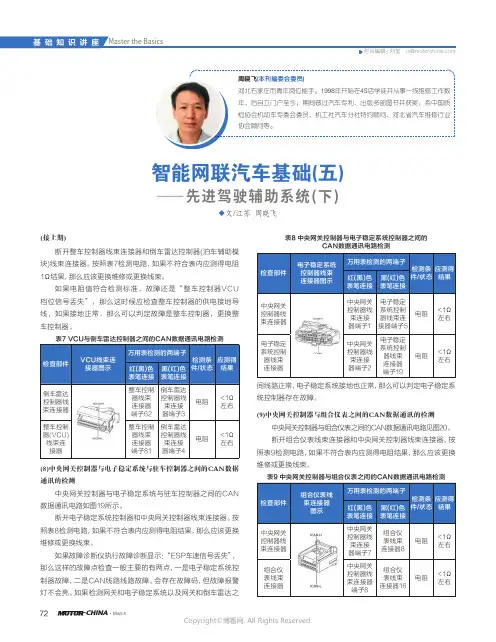
(8)中央网关控制器与电子稳定系统与驻车控制器之间的CAN数据通讯的检测中央网关控制器与电子稳定系统与驻车控制器之间的CAN 数据通讯电路如图19所示。
断开电子稳定系统控制器和中央网关控制器线束连接器。
按照表8检测电路,如果不符合表内应测得电阻结果,那么应该更换维修或更换线束。
如果故障诊断仪执行故障诊断显示:“ESP车速信号丢失”,那么这样的故障点检查一般主要的有两点,一是电子稳定系统控制器故障,二是CAN线路线路故障。
会存在故障码,但故障报警灯不会亮。
如果检测网关和电子稳定系统以及网关和倒车雷达之间线路正常,电子稳定系统接地也正常,那么可以判定电子稳定系统控制器存在故障。
(9)中央网关控制器与组合仪表之间的CAN数据通讯的检测中央网关控制器与组合仪表之间的CAN数据通讯电路见图20。
断开组合仪表线束连接器和中央网关控制器线束连接器。
按照表9检测电路,如果不符合表内应测得电阻结果,那么应该更换维修或更换线束。
◆文/江苏 周晓飞智能网联汽车基础(五)——先进驾驶辅助系统(下)(接上期)表8 中央网关控制器与电子稳定系统控制器之间的CAN数据通讯电路检测图19 中央网关控制器与电子稳定系统与驻车控制器之间的CAN数据通讯电路图图20 中央网关控制器与组合仪表之间的CAN数据通电路图(10)中央网关控制器与T-BOX之间的CAN数据通讯的检测中央网关控制器与中控大屏主机(T-BOX)之间的CAN数据图21 T-BOX之间的CAN数据通讯电路图(11)左后雷达传感器与左后中部雷达传感器之间的导线是否断路的检测左后雷达传感器和左后中部雷达传感器电路图如22、图23所示。