固定翼无人机航空摄影测量精度探讨8
- 格式:pdf
- 大小:347.33 KB
- 文档页数:5
1∶1000固定翼无人机倾斜摄影建模精度分析作者:冯雅秀朱兰艳龚绪才来源:《软件导刊》2018年第04期摘要:无人机倾斜摄影测量技术近年来已被广泛运用于数字城市建设和应急救灾行业中。
为研究三维模型在快速构建过程中的真实性和准确性,以1∶1 000大比例尺三维倾斜模型构建及对其精度的评估为目的,采用固定翼无人机作为航测平台,搭载3镜头数码相机,简要探讨了倾斜摄影的关键技术,总结了基于无人机倾斜摄影的数据采集和处理流程,并着重对相应数据成果进行了精度分析。
实验结果表明,各项精度均能满足1∶1 000大比例尺航测内业规范要求。
该方法能有效反映真实的地物地貌,大大提高了生产效率,对相关应用具有一定指导意义。
关键词:无人机;倾斜摄影;航线布设;三维建模;精度评估DOI:10.11907/rjdk.172593中图分类号:TP317.4文献标识码:A 文章编号:1672-7800(2018)004-0205-04Abstract:Unmanned aerial vehicle (UAV) oblique photography technology has been widely used in digital city construction and emergency relief in recent years. In order to study the authenticity and accuracy of 3D modeling in the rapid construction process, with the purpose of oblique 3D modeling at large-scale of 1∶1 000 and its accuracy evaluation, this paper uses a fixed-wing UAV as aerial platform equipped with an 3-lens digital camera for data capture, then it presents the key technology of oblique photography. Based on UAV oblique photography, this paper first summarizes the data acquisition and data processing workflow, then focuses on the evaluation the accuracy of the 3D model. Results show that the accuracy can satisfy specifications for office operation of low-altitude digital aerophotogrammetry at large-scale of 1∶1 000, and we can draw the conclusion that it can show the landform factually and effectively under the precondition of accuracy requirements, which increas production efficiency and plays an important role on directing the practical work.Key Words:UAV; oblique photography; flight route; 3D modeling; accuracy evaluation0 引言随着我国城市化进程的不断加快,传统的摄影测量[1]技术因不能全方位感知场景和重建模型而无法满足当前城市发展的需要。
无人机摄影测量在测绘中的优势与挑战近年来,无人机技术的快速发展为各个领域带来了革新性的变化,其中之一便是测绘领域。
无人机摄影测量以其高效、精确和灵活的特点,在测绘行业中逐渐崭露头角。
然而,与此同时,无人机摄影测量也面临着一系列的挑战。
本文将从优势和挑战两个方面来探讨无人机摄影测量在测绘中的现状。
无人机摄影测量的优势首先体现在其高效性。
相比传统测绘方法,无人机摄影测量能够快速捕捉和处理大量的空中影像数据。
通过自主飞行的无人机,可以在短时间内覆盖大范围的区域,获取高分辨率的影像。
同时,无人机可以固定飞行高度和航线,保证数据的一致性和准确性。
在测绘行业中,这种高效性意味着可以更快地获取地理信息,快速更新地图数据,以满足日益增长的需求。
其次,无人机摄影测量具有较高的精度。
现代无人机配备了高分辨率的相机和先进的测距设备,使得拍摄的影像拥有更高的几何精度。
通过将多张影像进行立体匹配和三维重建,可以得到高精度的点云数据和数字高程模型。
这些数据可以用于地形分析、建筑测量以及城市规划等方面。
与传统的地面测量相比,无人机摄影测量在精度方面表现出明显的优势,同时还能提供丰富的地物信息。
此外,无人机摄影测量在灵活性方面也具备明显的优势。
相比其他空中测绘技术,如航空摄影测量,无人机摄影测量具有较低的成本和较大的灵活性。
无人机可以在各种复杂环境下进行飞行,如山区、森林、水域等,使得无人机摄影测量能够用于更为广泛的领域。
此外,无人机可以根据需要进行实时调整,以适应不同任务的要求。
这种灵活性为测绘行业提供了更多的可能性,同时也为应急救援等领域提供了重要的技术支持。
然而,无人机摄影测量在测绘中并非一帆风顺,也面临着一些挑战。
首先是安全问题。
无人机在飞行过程中可能会与其他飞机或障碍物相撞,造成事故。
此外,由于无人机可以携带高分辨率相机,可能会侵犯他人的隐私权。
因此,制定相关的法律法规和规范,加强对无人机的管理和监督势在必行。
其次,数据处理和管理也是无人机摄影测量面临的挑战之一。
利用无人机航空像片进行大比例尺测图的探讨无人机航空摄影因具有机动灵活、速度快、体积小、质量轻、成本低等特点,近几年被广泛的应用在大比例尺测图当中。
但也正是因为其特点,也使得摄像质量受飞行环境的影响较大。
本文结合实际案例,阐述了无人机航摄的特点及应用范围,探讨分析了无人机航空像片进行1:2000比例尺地形图测绘的作业流程和技术方法,并论证了其可行性。
标签:无人机航空像片大比例尺测图1 概述无人机是利用无线电遥控设备和自备程序控制装置操纵的不载人飞机。
它的结构简单,造价较低,可以完成有人驾驶飞机不宜执行的多种任务。
无人机的飞行高度相对较低,在上面装载上高精度数码传感器可以测得分辨率高的像片,再加上它具有机动快速、操作简单、成本低等特点,因此逐渐被广泛的应用在军事、农业等各个领域当中。
但是,由于无人机航空摄影是近些年才快速发展的一项技术,在实际中暴露了许多有待解决的技术问题。
本文就结合某山区的实例,分析了无人机航空像片在进行1:2000比例尺测图的作业流程以及关键技术,从而论证了其可行性。
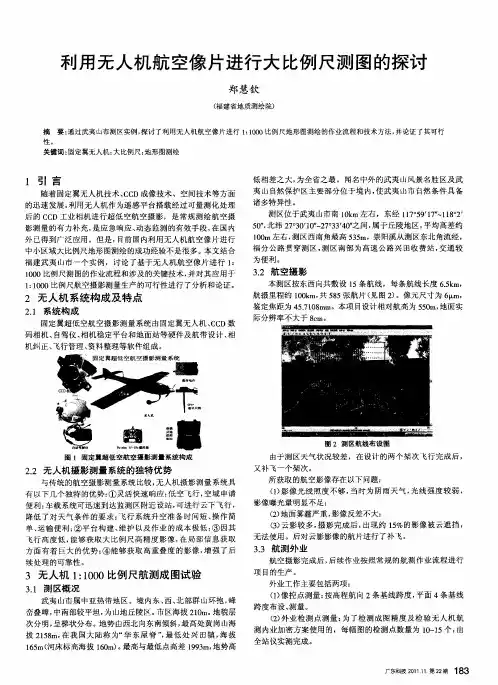
2 无人机航摄的特点及应用定位2.1 无人机航摄的特点与传统的航空摄影测量系统相比较,无人机摄影测量系统存在以下几方面的优势:①无人机机动灵活,不依赖于机场,操作简单,方便使用,可以迅速到达检测区,快速进行测量、成像,在较短的时间内测出检测结果,比较适用于小面积区域的测绘。
②低空飞行,通常是在云下飞行,装载上传感器能够获取大比例尺高精度影像。
③维护和作业成本低,无人机不用安装飞行人员驾驶设备、安全装置、语言通信装置等,同时由于无人机大多数利用数字成像技术,就不需要进行普通胶片的冲洗、扫描数字化、安装胶卷等。
④无人机可以获得高叠度的影像,这就提高了后续处理的可靠性。
2.2 无人机航摄的应用定位由于无人机具有以上特点,因此它的航空摄影通常会用在以下几方面:①应急测绘,如受灾地区的救援指挥;②困难地区测绘;③新农村、小城镇的建设测绘;④重大工程建设测绘,如电力、铁路、公路、铁路、水利、油漆等重大工程建设。
航空摄影测量新技术探讨摘要:航空技术在发展进步,航空摄影测量技术在城市的测绘、复杂地形测等领域被广泛应用,航空摄影测量技术的发展向我国测量事业提供非常重要的技术支撑,为矿山开发和地形勘测做出了重要贡献。
关键词:航空摄影测量;技术应用;发展在航空器里安装摄影仪器就是航空摄影测量,在空中实现对需测量的地形摄影。
随着我国经济的高速发展,地形变化的速度十分快,我国地形结构具有复杂性,仅仅靠传统的测量技术对特殊的地形很难进行实地测量,借助航空摄影技术就能够实现对与复杂地形的测量,航空摄影测量还能够缩短测量工作的周期,使测量数据的准确度得到提高。
一、航空摄影测量技术的主要工作1、地形测量。
对于航测来说,其主要任务就是地形测量,通过摄影来对地形进行测量,对地形更加了解,继而对摄影对象浓放,从而达到测量目的。
要引起注意的事项有:第一,保证摄影图形的图片和数据具体,并根据有关比例对数据还原,把还原出来的结果作为基础,建立图片库;第二,通过地形数据的分析之后再建立数据库,从而了解数据的参数变化的状况及分类方法,从而使测量的数字化得以实现;第三,对地形测量的相关数据加强了解,最终能够对地形的完整测量得以实现,最后真实的还原摄影图像。
总之,对航空摄影摄影的顺利开展要做到分工明确,这样才能保证摄影图像数据的准确性与真实性,使需要能够更好的被满足。
2、非地形测量。
航测的技术的应用十分范围广泛,它不仅仅只局限于地形测量的领域上。
非地形测量最终目的不是对地形进行测量,而是对地形变化进行观测,对地形变化中所出现的问题就可以更好的把握,比如航空摄影技术应用于军事领域,从地形的观察上,我们可以发现此地形是否有军事设备和此地区变化的情况。
此技术在工程领域应用,能够通过勘测地形来判断此区域是否有矿物质,从而对此区域更好地开发利用。
非测量功能的应用领域逐渐广泛起来,与此同时它发挥出的作用也越来越重要。
二、探讨航空摄影测量新技术1、GPS技术的应用传统空中三角测量用野外测量、航空摄影分布在特定位置上的地面控制点,把地面控制点作为基准,通过最小二乘平差对作业方式和地面目标空间位置进行确定,然而这种方式成本高、周期长、自动化程度偏低。
如何进行无人机航空摄影测量无人机航空摄影测量近年来逐渐成为一项热门的技术应用领域。
通过利用无人机进行航拍,可以迅速获取高分辨率的图像数据,并结合测量技术进行三维重建和地理信息抽取。
本文将从无人机选择、摄影策略、数据处理和应用领域四个方面探讨如何进行无人机航空摄影测量。
1. 无人机选择在进行无人机航空摄影测量之前,首先需要选择合适的无人机平台。
常见的无人机有固定翼和多旋翼两种类型,各有其优缺点。
固定翼无人机飞行速度快、续航时间长,适合大面积地形的航拍测量;而多旋翼无人机具有垂直起降和悬停能力,适合小范围、高精度的摄影任务。
根据实际需求选择合适的无人机平台,配备高分辨率、高精度的相机。
2. 摄影策略进行无人机航空摄影测量时,摄影策略是关键。
在制定摄影策略时,需要考虑目标区域的地形、光照条件、飞行高度等因素。
一般来说,飞行高度较低可以得到更高精度的图像数据,但需要增加航线密度;而飞行高度较高可以覆盖更大面积,但图像精度可能较低。
同时,考虑飞行路径的布局,可以采用航线相交或螺旋式的飞行方式,以获取更丰富的图像信息。
3. 数据处理获取的无人机航空摄影图像还需要进行后续的数据处理,以得到准确的测量结果。
首先,需要对图像进行校正,包括去除图像畸变和相机内外参数的标定。
然后,根据摄影几何原理,通过图像匹配和三角测量方法,得到地面特征点的三维坐标。
最后,可以利用密集匹配算法对图像进行三维重建,生成数字地图或三维模型。
数据处理过程需要借助专业的软件工具,并结合地理信息系统进行空间数据的分析和可视化。
4. 应用领域无人机航空摄影测量在许多领域都有广泛的应用。
首先,无人机航拍可以为土地规划和城市规划提供高精度的地形和地物数据,用于工程设计和土地管理。
其次,无人机航空摄影测量在农业领域具有重要意义,可以用于精准农业、作物监测和灾害评估。
此外,无人机航拍还可以应用于环境监测、文物保护和电力巡检等领域,提高工作效率和数据质量。
PPK技术辅助无人机航空摄影测量精度分析摘要:在科学技术不断发展的带动下,城市建设水平不断提升,特别是在进行城市规划的过程中,就需要对无人机摄影测量技术进行积极的运用,全面提升规划的合理性,为各项工作的顺利开展提供保障依据,推动可持续发展理念的有效推进。
目前,网络RTK技术受限于通信信号的强度,部分区域应用效果差。
基于此,以下对PPK技术辅助无人机航空摄影测量精度进行了探讨,以供参考。
关键词:PPK技术;无人机航空摄影测量;精度分析引言无人机是无人驾驶飞行器的简称,一般包括无人驾驶的固定无人翼机、多旋翼无人机和无人飞艇等。
近年来,随着航空摄影科学技术的不断发展,出现一种以无人机为载体携带数字航空摄影仪的新型测绘技术,即无人机航空摄影技术。
该技术的出现为很多领域内某些工作的开展带来了极大的方便,如在地质灾害应急救灾、城市规划、地理国情监测、地籍测图和工程测绘等方面发挥了积极作用。
1PPK技术的优势①可以与RTK、星站差分、单点定位同时进行。
②采用现有设备,不会增加额外成本。
③无论采用何种定位方式,最终提供的是拍摄瞬间相机位置的厘米级的坐标。
④RTK、星站差分浮动解或单点均可开展工作,不会影响到工作进度,提高生产效率。
⑤可完全采用单点定位的方式进行作业。
⑥PPK成果直接替换浮点解坐标或单点解坐标,无需复测。
⑦可不采用星站差分方式,节约星站差分信号服务费用。
2无人机航空摄影系统集成无人机航空摄影系统是以无人驾驶的固定翼、旋冀和飞艇等飞行器为飞行平台,搭载成像仪设备,获取地面信息的摄影测量方式。
无人机航空摄影系统一般由前期获取高精度航空影像数据的航空摄影部分(空中摄影和地面控制)和后期对影像数据处理的一系列过程(如利用航空摄影处理软件对图像的预处理,生成数字高程模型、数字正射影像图和地形图等产品)构成。
无人机载成像光谱仪技术具有强大的地物探测能力,具有光谱分辨率高的特点,能够进行探测地面目标和识别地物,可实现地物的精细分类。
无人机航空摄影测量的理论与方法随着科技的发展,无人机航空摄影测量在各个领域的应用越来越广泛。
它不仅可以帮助地质、气象、环境等领域的专家们更好地进行研究,还可以为城市规划、国土测绘等行业提供重要的数据支持。
本文将探讨无人机航空摄影测量的理论与方法。
一、无人机航空摄影测量的基本原理无人机航空摄影测量是利用无人机搭载的摄像设备对目标区域进行拍摄,并通过图像处理软件处理图像,获得空间数据信息和地物信息的一种技术方法。
其基本原理就是利用像点重叠度高的影像进行三维空间点的匹配,从而得到三维空间信息。
二、无人机航空摄影测量的数据采集在进行无人机航空摄影测量时,首先需要进行数据采集,保证获取到的图像质量足够高。
数据采集涉及到的因素很多,包括无人机的飞行高度、相机的安装角度、地面控制点的设置等。
其中,地面控制点的设置是非常重要的一环,它可以有效提高图像测量的精度。
因此,在进行无人机航空摄影测量前,需要进行充分的规划和准备,以确保数据的准确性和可靠性。
三、无人机航空摄影测量的影像处理无人机航空摄影测量的影像处理是其一个非常重要的环节。
通常可以通过配准影像、压缩影像、融合影像等方式对数据进行处理。
其中配准影像是指采用地面控制点进行影像校正,保证影像的几何精度。
压缩影像主要是为了保证影像的数据量不太大,可以加快数据的传输和处理速度。
而在融合影像的过程中,可以将多个影像融合成一个具有更加精确的地物信息和地形信息的影像。
四、无人机航空摄影测量的应用前景无人机航空摄影测量在地质、气象、环境等领域的应用已经非常成熟。
而在城市规划、国土测绘等行业中也具有广泛的应用前景。
例如在城市规划中,可以通过无人机航空摄影测量对城市进行三维建模,为城市规划提供精准的数据支持。
在国土测绘领域中,则可以利用无人机航空摄影测量的技术对大片土地进行快速高效的测绘,提高测绘效率和准确性。
总的来说,无人机航空摄影测量是一种非常有前景的技术,它为地质、气象、环境等领域的研究提供了更好的工具,也为城市规划、国土测绘等行业提供了更加精准的数据支持。
无人机航空摄影测量技术在工程测绘中的应用摘要:随着我国科学技术的不断提高,地形图测绘技术也呈现出了越来越多元化的趋势。
在这种情况下,无人机航摄测量技术应运而生。
其自身突出的特点,可以在地形图的应用中带来非常积极的效果。
基于此,对无人机航摄测量是工程测量进行分析,与传统测量技术相比具有非常突出的优势。
关键词:无人机;航空摄影测量;工程测绘;应用引言时代的不断进行,就地质工程方面而言,其工程准备阶段和开展阶段都进行到全新的局面,测量数据精准度要求更高、执行更加严格。
通过采用无人机航空摄影测量技术能够将通过定位系统、拍摄技术、地面监控系统对测量区域的数据进行精确的计算,从而有效提升测量工作的质量和效率。
1无人机航空摄影测量技术在工程测量中的优势无人机航空摄影测量技术是利用无线电遥控设备及加载好的程序控制装置获取测绘信息的一项技术。
从系统框架上来说,无人机航空摄影测量技术系统主要由无人机飞行平台、飞行控制系统、摄影传感器、数据通信系统、汽车运输设备及地面控制系统等部分组成,可根据测绘需求选择合适的技术设施,一般情况下,会选用固定翼无人机和EOS5DMarkⅡ摄影传感器。
在工程测量中,无人机航空摄影测量技术优势显著,具体如下:(1)灵活可控。
无人机灵活度高,飞行需求条件低,可控性强,自动化程度高,只需根据测绘要求设计好飞行航线,远程操控,设备便可随时起飞、降落,深入高山、丛林等地形险峻的地段测绘,突破外界环境对于工程测量的限制。
在人烟稀少、地势崎岖、交通不便区域的工程测绘中,可以采用无人机机载激光雷达技术,检测尺度比较大。
(2)监测效率高。
无人机工作效率高,每周可监测面积达到了2100km2,而且在无人机倾斜摄影测量技术的支持下,无人机可以从垂直及倾斜等多个角度采集遥感影像,无需重复测量,即可获取完整、真实的地标物信息,大大提升了监测效率。
工程参建单位借助这项技术,可实时监控工程建设情况,动态监测施工区域地理环境变化,保障施工安全。

无人机航空摄影技术研究无人机航空摄影技术是一种先进的影像采集与处理技术,它不仅是摄影和无人飞行器技术的结合,同时也是GPS、无线通信、电子图像处理等各个领域的综合应用。
无人机航空摄影技术能够提供高精度、高分辨率的影像数据,具有航拍范围广、拍摄速度快、成本低等优点,已广泛应用于测量、监测、安全、宣传等领域。
本文将重点探讨无人机航空摄影技术的研究现状、技术特点和应用前景。
一、研究现状无人机航空摄影技术最早应用于国防领域,用于军事侦察、目标识别、情报收集等方面,随着技术的不断发展和成本的不断降低,该技术开始在非军事领域得到广泛应用。
国外在无人机航空摄影技术方面的研究领先于国内,主要集中在无人机的设计、影像处理、航迹规划等方面。
在航拍影像处理方面,海量数据的存储、处理和分析是一个重要的挑战。
目前已经出现了一些高效的影像处理方法和软件,如Pix4D、Agisoft等。
国内的无人机航空摄影技术研究起步较晚,但目前正在迅速发展。
我国在无人机制造和影像处理方面已经取得了一定的成绩,如翼龙系列无人机、卫士系列无人机等,以及一些影像处理软件和平台,如SEOYEON软件等。
二、技术特点1.低成本:与传统航拍器相比,无人机成本低廉,其制造和维护成本相对较低。
2.高效率:无人机航空摄影技术摆脱了人员的局限,可以全天候、连续、高速地完成拍摄任务。
3.高灵活性:无人机航空摄影技术只需要一台电脑和一架无人机就可以完成复杂的影像采集任务。
4.高精度:无人机航空摄影技术能够提供高精度、高分辨率的影像数据,可以满足各种领域的需要。
5.多元化:无人机航空摄影技术可以应用于短距离航拍、全景影像采集、三维建模等不同领域。
三、应用前景无人机航空摄影技术已经广泛应用于测量、监测、安全、宣传等领域。
随着技术不断发展和应用场景的不断扩展,未来无人机航空摄影技术的应用前景将更加广阔。
以下是几个示例:1.城市规划:无人机航空摄影技术可以为城市规划提供高精度的地形、建筑等影像数据,有助于规划师进行设计和决策。
高精度航空摄影测量技术的发展与应用引言:随着科技的日新月异,高精度航空摄影测量技术在地理信息领域得到了广泛的应用。
该技术通过航空器搭载的高精度摄影仪,利用无人机或有人机进行高空拍摄,获取地面影像信息,并结合测量技术对影像进行处理和分析。
本文将探讨高精度航空摄影测量技术的发展历程以及其在地理信息、城市规划、环境保护等领域的应用。
一、高精度航空摄影测量技术的发展1.1 摄影测量技术的概念和发展摄影测量技术是一种基于影像的三维地图生成技术,通过对地面影像进行几何转换和解算,获取地物的空间位置和形状信息。
随着数字化技术的迅猛发展,摄影测量技术得到了革命性改进,实现了高精度、高效率的测量成果。
1.2 航空摄影测量技术的演进航空摄影测量技术的发展经历了相机的不断升级、测量算法的改进以及数字图像处理技术的革新等阶段。
从传统的底片相机到数字化照相机,再到无人机搭载的高精度数码相机,摄影测量技术的精度和效率有了质的飞跃。
1.3 航空摄影测量技术的核心问题高精度航空摄影测量技术面临的挑战主要包括传感器的准确性、影像的纠正和配准、运动捕捉和控制等。
这些问题需要结合精确的测量算法和创新的技术手段来解决。
二、高精度航空摄影测量技术的应用2.1 地理信息系统与高精度航空摄影测量技术地理信息系统(GIS)是一种广泛应用于城市规划、土地管理、农业资源开发等领域的技术。
高精度航空摄影测量技术提供了高分辨率、高精度的地表影像数据,为GIS的精细化地理信息提供了必要的数据支撑。
2.2 城市规划与高精度航空摄影测量技术城市规划是指在城市发展过程中,通过制定规划方案、调整土地利用结构以及城市布局,实现城市空间的合理和有序发展。
高精度航空摄影测量技术可以提供城市的三维形态和地理底图,辅助规划者进行城市设计和土地选址等决策。
2.3 环境保护与高精度航空摄影测量技术高精度航空摄影测量技术在环境保护领域的应用具有重要意义。
通过航拍获取的高分辨率影像数据可以用于监测森林资源、水体污染、土壤侵蚀等环境问题,并提供科学依据来制定环境保护政策和规划措施。
使用无人机进行航空摄影测量的技巧随着科技的发展和无人机的普及,无人机航空摄影测量成为了越来越受欢迎的测量方法。
无人机在测绘、地质勘探、建筑设计等领域具有广泛的应用前景。
然而,要想获得高质量的测量数据,并不是简单地将无人机送上天空就能实现的。
在本文中,我们将探讨使用无人机进行航空摄影测量的技巧。
首先,选择合适的无人机是至关重要的。
根据测量任务的需求,我们可以选择不同类型的无人机。
一般来说,固定翼无人机适用于大范围的测量任务,而多旋翼无人机则适用于小范围的、需要高精度数据的测量任务。
此外,我们还需要考虑无人机的承载能力和飞行时间等因素。
确保无人机的适用性和稳定性,是获取高质量测量数据的基础。
其次,进行航线规划是无人机测量的重要步骤。
在规划航线时,我们应该考虑测量区域的地形特点、障碍物和其他限制因素。
通过合理规划航线,可以提高测量效率和数据精度。
此外,飞行高度的选择也需要慎重考虑。
过高的飞行高度会导致分辨率过低,过低的飞行高度则可能导致过高的数据冗余。
综合考虑各种因素,选择适当的飞行高度是保证测量质量的关键。
在实际测量中,我们还需要正确选择和配置相机设备。
相机的选择应该根据测量任务的需求来确定,包括所需分辨率、光学焦距、传感器尺寸等。
同时,我们还需要进行相机的校正和定标,以确保测量结果的准确性和一致性。
合适的相机设置和调整可以提高测量数据的质量,并为后续处理提供更好的基础。
拍摄图像后,数据处理是使用无人机进行航空摄影测量的重要环节。
对于无人机航拍的图像数据,我们可以通过图像匹配和三维重建等方法,提取出三维模型和其他测量信息。
此过程中,我们需要进行图像的配准和精确匹配,以消除因不同角度、光照和畸变等因素引起的误差。
此外,配准过程中还需要进行地面控制点的选择和标定,以提高测量精度。
最后,使用无人机进行航空摄影测量时,我们还需要注意数据的后期处理和分析。
通过对测量数据的分析和处理,我们可以得到更详细、准确的测量结果,并进行进一步的应用和研究。
航空摄影测量中控制测量要点探讨摘要:无人机设备在实践中得到广泛应用,可以完成人工操作中无法实现的任务,为生产作业提供可靠保障。
近年来,随着现代化建设进程的加快,在测量工作有助于实现国土科学规划,增强建设动力,实现资源高效化利用。
本文主要就航空摄影测量中控制测量要点进行了分析。
关键词:航空摄影测量;控制;测量引言运用航空摄影测量技术,可以将摄影设备搭载设备中,满足多元化使用需求,真正为测量工作提供支持。
在实践作业当中,应该结合测量工作的目标及要求,确定切实可行的技术方案,避免在应用航空摄影测量技术时面临较大的风险。
1航空摄影测量概述航空摄影测量是借助航空器完成影像拍摄的测量方法。
根据摄影方式的差异,航空摄影测量分垂直摄影测量和倾斜摄影测量。
其中,垂直摄影测量方法是在无人机上搭载垂直方向的摄影相机进行摄影测量,该方法只能获取垂直方向的影像数据,所以在高大建筑、树木等遮挡严重区域的影像数据中存在大量的“留白”,从而降低了航空摄影测量的总体精度。
随着图像融合及大数据处理技术的快速发展,在垂直摄影相机上增加了多角度、多方位的摄影相机,实现了从不同方位、角度获取测绘区影像数据的目的,使得被测量的目标体侧面纹理信息反映更加全面,有效地解决了影像数据“留白”问题,从而提高了测量精度,但同时也为图像融合处理增加了难度。
像片控制测量是航空摄影测量的重要组成部分,是提高测量精度的主要途径,也是有效消除投影差的主要方法。
像片控制测量在测绘区域实地进行,该测量成果可用于空中三角加密测量或目标测绘区域平面坐标、高程坐标的校正。
其中,空中三角加密测量是以航空影像数据为基础,利用像片控制点的三维坐标建立相应的空间关系,从而获得影像数据中密集点云数据的平面位置、高程以及像片的方位等控制变量。
因此,像片控制测量是航空摄影测量的基础。
像控点的布点方式是影响像片控制测量精度的重要因素,其布设应结合测绘区域地形地貌而定。
2控制测量布点方式选择2.1 全野外布点方式全野外布点方式: 顾名思义就是所有的控制点均在野外完成,像片控制点不需要内业加密处理,其结果可直接用于空中三角加密测量或者内业地形图成图使用。
浅析无人机航摄影像测绘地形图的精度摘要:在科技不断发展的背景下,原有的航空摄影测量规范已经无法满足航空摄影测量的要求,无人机航摄影像测绘技术属于一种新型的测绘技术,并且自身具有显著的优势,能够成为传统航空摄影的有力补充。
所以在本文中,主要对无人机航摄影像测绘地形图的精度进行分析。
关键词:无人机;航空摄影;测绘地形图;精度当前我国超轻型飞行器、无人飞行器等小像幅数码相机航空摄影得到了深入的研究和高速的发展。
作为一种新的测绘手段,其具有灵活、便捷等优势,应用成本低廉,且能够高效的获取准确的数据,将其应用于突发自然灾害地区、小块区域以及常规航拍困难地区等,可以体现出良好的应用效果。
二、像控点布设方案无人机航空具有基线长度较短、摄影像幅小以及航片之间重叠度大的特点,相对于数码影像或是常规航片,在制作比例以及面积均相同的地形图之中,无论是像片总数还是航线数,无人机数码像片均远大于数码影像以及常规航片,若根据原航空摄影测量规范对野外像片控制点进行布设,外业工作量则会出现成倍的增加。
如何保障像控点布设方案能够有效满足测图精度的要求,是将无人机应用于航摄影像测绘地形图的关键。
(一)无人机航空摄影使用的相机为佳能5Dmark II数码相机,焦距为24.3030mm,相对航高为810m,航向重叠为70%——75%,旁向重叠则在40%——50%之间,基线的长度为210m;旋偏角最大能够达到2.1度,影像色彩为真彩色,像素的大小为6.4um,地面分辨率在21cm左右,单张原始影像的尺寸为3744×5616像素,经过畸变改正之后,影像尺寸为3820×5712像素,能够进行覆盖的地面面积,则为802m×1200m左右。
(二)试验区选取不同布设方案之下的像控点区域网平差解算试验区的面积在15.5平方公里左右,能够涉及到5条航线和125张像片,地形基本为平地。
选择其中4平方公里的预期制作成为比例为1:2000的地形图测制试验区,其中四分之三的面积为平地,另外四分之一的面积为丘陵;之后,在比例为1:2000的地形图测制试验区之中选择面积为1平方公里的区域,制作成为比例为1:1000的地形图进行试验。
无人机航空摄影测量在地形图测绘中的应用探讨随着科技的进步和无人机技术的不断发展,无人机航空摄影测量在地形图测绘中的应用正变得越来越广泛。
相比传统的测量方法,无人机航空摄影测量技术具有成本低、效率高、精度高等优点,因此被广泛应用于地形图测绘领域。
本文将探讨无人机航空摄影测量技术在地形图测绘中的应用,包括其优势和挑战,以及未来的发展方向。
一、无人机航空摄影测量技术的优势1. 成本低相比传统的测量方法,使用无人机进行航空摄影测量可以大大降低测量成本。
传统的测量方法需要大量人力和物力投入,而无人机只需要少量人员即可完成测量任务,大大降低了成本。
2. 效率高无人机航空摄影测量技术可以快速、高效地完成测量任务。
由于无人机可以在空中自由飞行并进行自动化摄影,因此可以在较短的时间内完成大面积的地形图测绘,大大提高了测量效率。
3. 精度高无人机航空摄影测量技术可以实现高精度的测量。
通过使用高分辨率的航空摄影设备和先进的数据处理技术,可以获得地形图的高精度测量数据,满足不同需求的精度要求。
1. 地形图测绘无人机航空摄影测量技术被广泛应用于地形图的测绘工作中。
通过无人机航空摄影测量,可以获取大范围、高精度的地形数据,为城市规划、农业生产、水资源管理等领域提供重要的地理信息支持。
2. 灾害监测无人机航空摄影测量技术在灾害监测中也有重要应用。
在地震、洪涝、森林火灾等灾害发生后,无人机可以快速飞行并进行航空摄影,获取受灾区域的高分辨率影像,为灾害评估和救援工作提供重要数据支持。
3. 建筑测量无人机航空摄影测量技术可以用于建筑物的测量和监测。
通过使用无人机航空摄影测量技术,可以获取建筑物的立面图和三维模型,为建筑设计和监理提供数字化的技术支持。
1. 数据处理无人机航空摄影测量获取的大量数据需要进行高效、精确的处理,包括图像拼接、三维重建、数字模型等技术。
这需要专业的数据处理人员和先进的数据处理软件,是无人机航空摄影测量技术面临的挑战之一。
万方数据第11期程崇木,等:固定翼无人机航空摄影测量精度探讨55数,然后对影像进行纠正,从而获取可测量的影像。
在像坐标系下,畸变差改正公式为:△z=(x一茗o)(kir2+k2r4)+P1[r2+2(x一‰)2]+2p2(髫一zo)(Y—Yo)+n(z一石o)+/3(y—Yo)△y=(y—Y。
)(☆。
r2+k2r4)+P2[r2+2(y—Yo)2]+2pl(石一zo)(Y—Yo)(1)式中,z,Y为像点坐标;Ax,ay为像点改正值;菇。
,Y。
为像主点;r=√(戈一戈。
)2+(Y—Y。
)2;矗。
,k:为径向畸变系数;p。
,P:为切向畸变系数;仪为像素的非正方图1原始影像与可量化影像的叠加形比例因子;口为CCD阵列排列非正交性的畸变系数。
由此,引入畸变差后的共线方程,通过共线方程式可解算畸变差参数:x—z。
一△x=一厂:÷;;;;._;÷;—;—:;÷;;-;}_;;;揣y一,,。
一△y=一,:;;;;;__;÷;—;—:;;;j:—;i;糕(2)式中,x,y,z为相机的空间坐标;x,,t,z。
为相机的外方位元素的线元素;al,b1,Cl,a2,b2,C2,a3,b3,c3为矩阵旋转系数。
同时,可以通过构建共线方程来解算加固改装后的相机内方位元素:floj(X—X。
)+bl(Y—Ys)+c。
(Z—Z。
)l“~一。
03(x—X;)+b3(y—F)+c3(Z—Z。
),n2(x—X。
)+b:(Y一¨)+c:(Z—Z。
)【7’o一。
03(x—X。
)+b3(Y—F)+c3(Z—Z,)(3)由此,可以获取相机可量测化的所有误差因素的参数,固定翼无人机航空摄影获取影像后,通过修正,得到的重采样数码影像即可以满足摄影测量的要求。
可以通过实例观察这些误差对测量造成的精度影像,图1是原始影像与可量化影像的叠加图。
从叠加影像的中心到边缘,分别裁取3块影像,直观地观察畸变差等对成像的影响。
从图1和图2可以直观地看出,加固改装后的CCD相机存在着很大的误差(仪器误差)。
本例影像航高500m,地面实际分辨率8em,从光轴中心到影像边缘这种误差逐步加大,到边缘部分最大为30个像素左右,平面误差2~3In。
很显然,仪器误差是航空摄影测绘所不能接受的,必须通过标定,对这种误差进行处理和消除,将其限定在一定范围内,以满足航空摄影测绘的要求。
图2从影像中心到边缘裁职的影像3内业数据采集测量误差分析固定翼无人机航空摄影系统采用的CCD阵面为矩形阵面。
这与传统正方形幅面有所不同。
这样,在航空摄影时,CCD阵面的放置方向将会影响摄影测量内业成图的量测交会角的大小,从而影响像坐标测量精度。
以武汉海地测绘科技有限公司研制的固定翼无人机航空摄影系统所搭载的传感器来分析,其CCD阵面像素为8984×6732(行×列)像素数,象元尺寸为6¨m,鉴定焦距为46.2132mm,按航向60%的重叠度进行航空摄影,则像方基线长度(图3)为:b=(1—60%)×L。
式中,£,为航向像片幅面宽度。
那么,像点交会角为:p=arctan(b/f)式中,.厂见图3。
以6表示作业员在航向方向测量的左右视差误差,一般按象元尺寸的1/3来估算,那么由于作业员测量误差产生的平面误差为:Az=m×6式中,m为航摄比例尺分母。
高程误差为:Ah=Ax/tanO根据以上公式,可估算1500m航高时,该固定翼无人机航空摄影系统所能达到的平面和高程测量精度。
(1)CCD阵面长边垂直于航线方向。
在这种相万方数据万方数据固定翼无人机航空摄影测量精度探讨作者:程崇木, 张俊华, 孙炜, 唐建林, 高宇, CHENG Chongmu, ZHANG Junhua, SUN Wei , TANG Jianlin, GAO Yu作者单位:程崇木,张俊华,孙炜,CHENG Chongmu,ZHANG Junhua,SUN Wei(湖北省水利水电勘测设计院,湖北,武汉,430064), 唐建林,TANG Jianlin(湖南省地质测绘院,湖南,长沙,421001), 高宇,GAO Yu(武汉海地测绘科技有限公司,湖北,武汉,430074)刊名:人民长江英文刊名:YANGTZE RIVER年,卷(期):2010,41(11)被引用次数:0次1.期刊论文贾建军.舒嵘.王斌永.JIA Jian-jun.SHU Rong.WANG Bin-yong无人机大面阵CCD相机遥感系统-光电工程2006,33(8)针对无人机遥感有效载荷的特点,利用系统集成的方法,设计了一套实用的无人机大面阵CCD相机遥感系统.介绍了系统的相机机身,光学镜头,面阵CCD后背,控制计算机以及这些组件的匹配关系.最后介绍了面阵相机的减振系统.所研制的系统在Y-12遥感飞机上进行了搭载飞行试验,获得了符合要求的图像.2.期刊论文杨伟锋.洪津.乔延利.汪元钧.王乐意.龚平.王锋.YANG Wei-feng.HONG Jin.QIAN Yan-li.WANG Yuan-jun.WANG Le-yi.GONG Ping.WANG Feng无人机载偏振CCD相机光机系统设计-光学技术2008,34(3)从满足无人机试验条件出发,完成了三路并行无人机载偏振CCD相机的光机结构设计.重点解决了偏振CCD相机像方远心光学系统的设计,抗过载及抗冲击的光机结构设计.通过光学装校,三路系统各CCD像元对准偏差在二个像元之内.3.学位论文过于成无人机面阵CCD相机的研制及其成像质量与振动关系的研究2005随着社会和科技的发展,遥感技术发展迅速并得到越来越广泛的应用.航空遥感是主要的遥感手段之一,它具有分辨率高,周期短,机动灵活等特点,遥感仪器也从胶片成像发展到了数字式成像.以无人机作为平台的航空遥感在这方面的特点更加突出,而且成本低廉.许多国家都在积极发展无人机遥感系统,而国内可用于无人机平台的高分辨率面阵相机却较少,尤其缺乏适用于低空轻小型无人机平台的小型高分辨率面阵CCD相机.针对这种情况,我国在无人机遥感的研究开发上加大了投入.本课题属于上海市2003年度科技攻关计划项目,依托单位是中国科学院上海技术物理研究所.上海技术物理研究所是专业从事遥感技术研究开发的单位,科研实力雄厚,有先进的设备条件,保证了本课题的顺利实施.本课题通过光机电硬件的集成,以先进性和实用性为目标,设计了一套高分辨率的面阵CCD相机,体积小,重量轻,功耗低,达到了无人机或其他轻小型平台应用的要求,填补了国内无人机遥感系统小型高分辨率面阵CCD相机的空白,提高了国内无人机遥感成像的分辨率水平.在此基础上,为保证面阵CCD相机的高分辨率,本文重点研究了振动和成像质量的关系.通过在Adams软件中建立相机的分析模型,编写Matlab程序求解光学传递函数对成像质量进行评价,建立了一个完整的可以定量分析和评价振动与成像质量关系的系统.通过这样的方法为面阵CCD相机系统的设计,如振动的抑制,曝光时间的控制等提供了依据,从而保证相机高分辨率的实现.最后,在进行上述分析的基础上,本文设计了特殊的减振装置.此减振装置通过直线轴承把角振动转化为线振动,在减振的同时抑制振动的耦合,经试验分析达到了良好的控制效果.4.会议论文刘福安通用无人机线阵CCD相机2000安装在无人机飞行平台上的线阵,CCD相机每一次积分产生一行图像信号,随着飞机的向前飞行逐行扫描(推扫)地面目标形成一定宽度扫掠带的图像信号.该图像信号经过传输通道实时地传送到地面接收站,再经过地面站处理生产出图像产品.5.期刊论文荣长军.赵会超.韩卫华.王家营.李玉泉.RONG Chang-jun.ZHAO Hui-chao.HAN Wei-hua.WANG Jia-ying .LI Yu-quan面阵CCD镜头畸变校正-光电技术应用2007,22(4)由于面阵CCD镜头畸变的存在,使得对探测目标产生较大的定位误差.在实验分析的基础上,对因CCD镜头产生的畸变进行了校正.结果表明,通过对面阵CCD镜头进行畸变校正,可以有效地提高定位的精度.6.会议论文金继才.严德斌CCD器件在无人机侦察中的应用研究1997由于科学技术的飞速发展,新型的CCD器件不断涌现,充分发挥和提高CCD器件在无人机侦察中的地位和作用,是他们急待研究的课题。
该文根据中国人民解放军现今无人机中的装备,进一步讨论CCD器件在无人机侦察中的应用技术。
7.期刊论文王一凡.谌德荣.张立燕.WANG Yi-fan.CHEN De-rong.ZHANG Li-yan一种用于小型无人机避障的快速视差测距方法-中国测试技术2008,34(3)为了实现小型无人机快速自主测距避障,在双目视差测距的基础上,提出了一种机载三目视差测距算法,利用三个视觉传感器测得的数据,推导出简单的距离公式.利用各传感器成像间的相关性,提出了一种加快图像识别方法,通过缩小对图像中障碍物像元的搜索范围,有效地减小了目标搜索运算量,加快了搜索速度,为小型无人机快速自主避障系统的研制创造了条件.8.学位论文韩丽航空数码相机图像处理研究2007航空侦察是一门集光学、红外、微波、雷达、激光、计算机、数字图像处理等学科于一体的新兴综合性探测技术。
以无人机为平台、航空数码相机照相获得图像信息的无人机侦察系统是航空侦察的一个重要分支。
它主要通过航空数码相机内部的图像传感器将光信号转换成数字图像信号,然后再进行图像处理、存储和传输。
无人机在数千米的高空以一定速度飞行,航空相机大多数以垂直方式对地面景观进行拍摄和高速图像信息采集。
这种环境下所拍摄到的图像属于照度低,对比度差的复杂图像;同时由于大气流动、云雾遮掩、机身振动、图像传感器和图像采集通道的固有因素,使得采集而来的原始图像信息必然带有一定的噪声,从而必须对原始图像信息进行预处理,主要手段为图像增强和图像去噪。
只有对原始图像信息进行预处理才能获得有应用价值的准确的图像,并且有利于后期的图像处理,包括图像的实时压缩和实时传输,及地面上图像分析和图像信息融合。
随着科技的进步,图像传感器的像素数是越来越大,航空数码相机的分辨率也不断地提高,侦察覆盖范围不断地扩大,导致了图像的数据量成倍地增长。
图像数据的增长给图像的存储和传输带来了新的问题。
大容量存储介质(MSF)虽然有效地解决了海量数字信号的存储问题,但是存储速度和传输速度却是超大分辨率侦察图像实现信息的高速采集的瓶颈。
在军事上,进行大容量存储的同时把图像实时传送到地面站,可以对战场情况进行实时分析,在军事领域具有重大意义。
为了减轻存储和传送的数据量,在保证图像质量的情况对图像进行压缩自然是航空数码相机领域的重要研究内容。