delta机器人
- 格式:doc
- 大小:413.00 KB
- 文档页数:3

一、Delta并联机器人1. Delta并联机器人概述Delta机器人属于高速、轻载的并联机器人,一般通过示教编程或视觉系统捕捉目标物体,由三个并联的伺服轴确定抓具中心(TCP)的空间位置,实现目标物体的运输,加工等操作。
Delta机器人主要应用于食品、药品和电子产品等加工、装配。
Delta机器人以其重量轻、体积小、运动速度快、定位精确、成本低、效率高等特点,正在市场上被广泛应用。
2. Delta并联机器人特点Delta机器人是典型的空间三自由度并联机构,整体结构精密、紧凑,驱动部分均布于固定平台,这些特点使它具有如下特性:承载能力强、刚度大、自重负荷比小、动态性能好。
并行三自由度机械臂结构,重复定位精度高。
超高速拾取物品,一秒钟多个节拍。
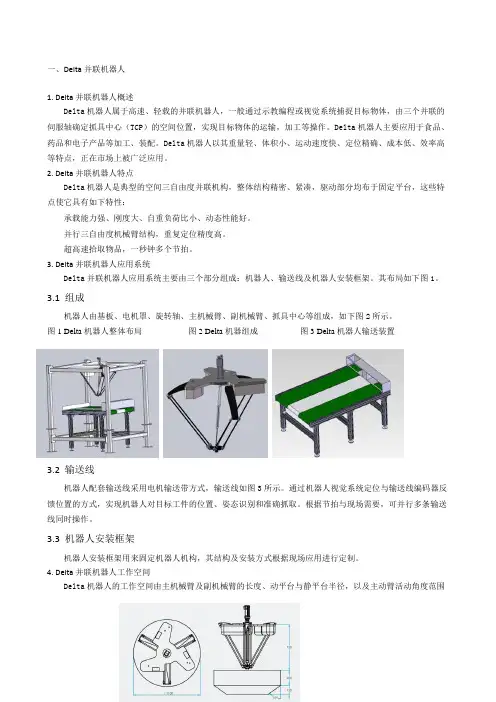
3. Delta并联机器人应用系统Delta并联机器人应用系统主要由三个部分组成:机器人、输送线及机器人安装框架。
其布局如下图1。
3.1 组成机器人由基板、电机罩、旋转轴、主机械臂、副机械臂、抓具中心等组成,如下图2所示。
图1 Delta机器人整体布局图2 Delta机器组成图3 Delta机器人输送装置3.2 输送线机器人配套输送线采用电机输送带方式,输送线如图3所示。
通过机器人视觉系统定位与输送线编码器反馈位置的方式,实现机器人对目标工件的位置、姿态识别和准确抓取。
根据节拍与现场需要,可并行多条输送线同时操作。
3.3 机器人安装框架机器人安装框架用来固定机器人机构,其结构及安装方式根据现场应用进行定制。
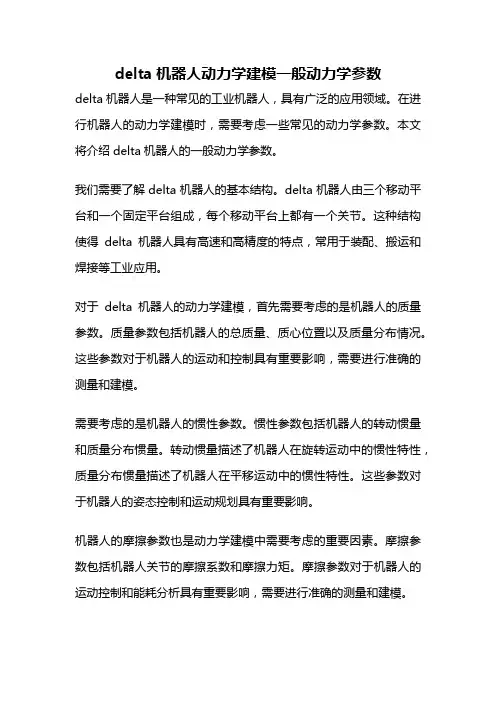
4. Delta并联机器人工作空间Delta机器人的工作空间由主机械臂及副机械臂的长度、动平台与静平台半径,以及主动臂活动角度范围这几个参数来确定。
以负载为一公斤的delta机器人工作空间为例,如下图所示。
5. Delta并联机器人运动轨迹Delta机器人基本的运动轨迹如下图,由S1、S2、S3构成门字形的三部分轨迹组成,分别为拾取、平移、放置三个阶段。
Delta机器人进行抓取目标工件时主要以走门字形运动轨迹,也可根据不同的应用要求,规划不同的运动轨迹。

delta机器人动力学建模一般动力学参数delta机器人是一种常见的工业机器人,具有广泛的应用领域。
在进行机器人的动力学建模时,需要考虑一些常见的动力学参数。
本文将介绍delta机器人的一般动力学参数。
我们需要了解delta机器人的基本结构。
delta机器人由三个移动平台和一个固定平台组成,每个移动平台上都有一个关节。
这种结构使得delta机器人具有高速和高精度的特点,常用于装配、搬运和焊接等工业应用。
对于delta机器人的动力学建模,首先需要考虑的是机器人的质量参数。
质量参数包括机器人的总质量、质心位置以及质量分布情况。
这些参数对于机器人的运动和控制具有重要影响,需要进行准确的测量和建模。
需要考虑的是机器人的惯性参数。
惯性参数包括机器人的转动惯量和质量分布惯量。
转动惯量描述了机器人在旋转运动中的惯性特性,质量分布惯量描述了机器人在平移运动中的惯性特性。
这些参数对于机器人的姿态控制和运动规划具有重要影响。
机器人的摩擦参数也是动力学建模中需要考虑的重要因素。
摩擦参数包括机器人关节的摩擦系数和摩擦力矩。
摩擦参数对于机器人的运动控制和能耗分析具有重要影响,需要进行准确的测量和建模。
机器人的力矩参数也是动力学建模中需要考虑的关键因素。
力矩参数包括机器人的关节力矩和末端执行器的力矩输出。
力矩参数对于机器人的力控制和负载能力具有重要影响,需要进行准确的测量和建模。
机器人的刚度参数也是动力学建模中需要考虑的重要参数。
刚度参数包括机器人的刚度系数和刚度矩阵。
刚度参数对于机器人的刚性控制和运动精度具有重要影响,需要进行准确的测量和建模。
delta机器人的动力学建模需要考虑质量参数、惯性参数、摩擦参数、力矩参数和刚度参数等一般动力学参数。
准确建模这些参数对于机器人的运动控制、力控制和精度控制具有重要意义,能够提高机器人的性能和应用范围。
在实际应用中,需要根据具体情况对这些参数进行准确的测量和建模,以实现对delta机器人的精确控制和优化设计。



delta机器人工作原理Delta机器人工作原理Delta机器人是一种特殊类型的工业机器人,主要用于高速、高精度运动的应用场景,如装配、包装、拣选和加工等。
Delta机器人具有优异的速度、精度和稳定性,成为了许多工业生产线上不可或缺的重要工具。
那么,Delta机器人工作原理是什么呢?下面,我们来一步步解析。
一、Delta机器人的定义Delta机器人是一种由三个并联机械臂组成的运动平台机器人,其中一个跟随其中一个轴线固定且相互垂直的臂作为基础,还有两个直线型平移臂相对地连在基础臂的两旁,三个臂基于关节和连接处具有一定范围的转动和伸缩,从而带动末端执行器在三维空间内实现精准定位和高速运动。
二、Delta机器人臂的结构Delta机器人的三个臂都是由一系列小型的连杆和转动关节组成的,这些关节和连杆也称为连轴器,关节带动连杆转动,连杆的长度和调整可以控制机械臂的位置。
这个连杆和转动关节的结构既紧凑又坚固,具有较高的稳定性和承载能力。
三、Delta机器人运动原理Delta机器人的运动原理是基于三个运动平台的协同运动,每个平台内部由6个运动自由度(三个旋转和三个伸缩)构成,每个运动平台上装有弹性杆、转动关节和执行器,通过单独控制每个平台的状态来实现机器臂的高速和点精度运动。
其中,每个弹性杆安装在一个伸缩套筒上,并连接到运动平台的两个转动关节上,整个弹性杆组成一个三角形。
通过控制下方的三个伸缩套筒的深度调整三角形的形状,从而在三维空间内实现各种姿态和位置的改变。
当前三个运动平台的平面相交,可以实现更高层次的速度和精度控制。
四、Delta机器人的控制系统Delta机器人的控制系统主要由硬件和软件两部分组成,硬件包括运动平台、传感器、运动控制器和执行器等,而软件则是指运动学算法和路径规划算法。
其中,运动学算法是描述机器人姿态和位置的数学模型,可以通过传感器采集的数据信息,反推机器人的运动状态;路径规划算法则是根据物体的坐标和机器人对该物体的加工场景,生成机器人的动作路径,以完成某种加工工艺。
一、Delta并联机器人
1. Delta并联机器人概述
Delta机器人属于高速、轻载的并联机器人,一般通过示教编程或视觉系统捕捉目标物体,由三个并联的伺服轴确定抓具中心(TCP)的空间位置,实现目标物体的运输,加工等操作。
Delta机器人主要应用于食品、药品和电子产品等加工、装配。
Delta机器人以其重量轻、体积小、运动速度快、定位精确、成本低、效率高等特点,正在市场上被广泛应用。
2. Delta并联机器人特点
Delta机器人是典型的空间三自由度并联机构,整体结构精密、紧凑,驱动部分均布于固定平台,这些特点使它具有如下特性:
承载能力强、刚度大、自重负荷比小、动态性能好。
并行三自由度机械臂结构,重复定位精度高。
超高速拾取物品,一秒钟多个节拍。
3. Delta并联机器人应用系统
Delta并联机器人应用系统主要由三个部分组成:机器人、输送线及机器人安装框架。
其布局如下图1。
3.1 组成
机器人由基板、电机罩、旋转轴、主机械臂、副机械臂、抓具中心等组成,如下图2所示。
图1 Delta机器人整体布局图2 Delta机器组成图3 Delta机器人输送装置3.2 输送线
机器人配套输送线采用电机输送带方式,输送线如图3所示。
通过机器人视觉系统定位与输送线编码器反馈位置的方式,实现机器人对目标工件的位置、姿态识别和准确抓取。
根据节拍与现场需要,可并行多条输送线同时操作。
3.3 机器人安装框架
机器人安装框架用来固定机器人机构,其结构及安装方式根据现场应用进行定制。
4. Delta并联机器人工作空间
Delta机器人的工作空间由主机械臂及副机械臂的长度、动平台与静平台半径,以及主动臂活动角度范围这几个参数来确定。
以负载为一公斤的delta机器人工作空间为例,如下图所示。
5. Delta并联机器人运动轨迹
Delta机器人基本的运动轨迹如下图,由S1、S2、S3构成门字形的三部分轨迹组成,分别为拾取、平移、放置三个阶段。
Delta机器人进行抓取目标工件时主要以走门字形运动轨迹,也可根据不同的应用要求,规划不同的运动轨迹。
6. Delta并联机器人产品用途
各类食品包装生产线;药品分拣、收集;电子行业:电路板焊接;轻质产品的包装及加工装配。
7. Delta并联机器人系列
以负载重量划分:1kg、3kg、5kg。
以工作空间直径划分:800mm、1100mm、1600mm。
针对客户的个性化需求,可根据不同的工作空间以及不同的负载重量要求提供定制Delta机器人解决方案,及Delta机器人的配套生产线交钥匙工程。
小Delta并联机器人大Delta并联机器人。