相控阵天线原理图
- 格式:vsd
- 大小:49.00 KB
- 文档页数:1
一种ka频段相控阵天线近年来,随着通信技术的不断发展,相控阵天线作为一种重要的天线技术,被广泛应用于卫星通信、雷达、无线通信等领域。
在这些应用中,ka频段相控阵天线因其高频率、高速率和高带宽等特点,成为了研究的热点之一。
本文将介绍一种ka频段相控阵天线的设计和实现。
一、ka频段相控阵天线的基本原理相控阵天线是一种由多个天线单元组成的天线阵列,通过控制每个天线单元的相位和振幅,实现对天线阵列的辐射方向和波束宽度的控制。
ka频段相控阵天线的工作频率在26.5GHz至40GHz之间,具有高频率、高速率和高带宽等特点,因此在卫星通信、雷达、无线通信等领域有着广泛的应用。
二、ka频段相控阵天线的设计和实现本文设计的ka频段相控阵天线由16个天线单元组成,每个天线单元由一个微带天线和一个相位调节器组成。
微带天线采用圆形贴片天线,具有小尺寸、低成本、易制造等优点。
相位调节器采用PIN二极管,通过改变二极管的偏置电压,实现对天线单元的相位控制。
在实现相控阵的过程中,需要对每个天线单元的相位进行精确的控制。
为了实现这一目标,本文采用了一种基于DSP的相位控制方法。
具体来说,通过DSP芯片对每个天线单元的相位进行数字控制,实现对天线阵列的辐射方向和波束宽度的控制。
三、ka频段相控阵天线的性能测试为了验证本文设计的ka频段相控阵天线的性能,我们进行了一系列的实验。
实验结果表明,本文设计的相控阵天线具有较好的辐射特性和波束宽度控制能力。
在26.5GHz至40GHz的频段内,天线阵列的增益达到了20dB以上,波束宽度可控制在2度以内。
四、结论本文介绍了一种ka频段相控阵天线的设计和实现。
通过采用微带天线和PIN二极管相位调节器,实现了对天线阵列的相位控制。
同时,通过基于DSP的相位控制方法,实现了对天线阵列的辐射方向和波束宽度的精确控制。
实验结果表明,本文设计的相控阵天线具有较好的性能和应用前景。
干货!有源相控阵的天线设计的核心:T/R组件
有源相控阵天线设计的核心是T/R组件。
T/R组件设计考虑的主要因素有:不同形式集成电路的个数,功率输出的高低,接收的噪声系数大小,幅度和相位控制的精度。
同时,辐射单元阵列形式的设计也至关重要。
1 芯片设计理想情况下,所有模块的电路需要集成到一个芯片上,在过去的几十年,大家也都在为这个目标而努力。
然而,由于系统对不同功能单元需求的差别,现有的工程技术在系统性能与实现难度上进行了折衷的考虑,因此普遍的做法是将电路按功能进行了分类,然后放置于不同的芯片上,再通过混合的微电路进行连接,如图所示。
一个T/R模块的基本芯片设置包括了3个MMICs组件和1个数字大规模集成电路(VLSI),如图所示。
高功率放大器(MMIC)
低噪声放大器加保护电路(MMIC)
可调增益的放大器和可调移相器(MMIC)
数字控制电路(VLSI)
根据不同的应用需求,T/R模块可能还需要其他一些电路,如预功放电路需要将输入信号进行放大以满足高峰值功率需求。
大多数X波段及以上频段T/R组件都采用基于GaAs工艺的MMICs技术。
该技术有个缺点就是热传导系数极低,因此基于GaAs的电路需要进行散热设计。
未来T/R组件的发展方向是基于GaN和SiGe的设计工艺。
基于GaN的功率放大器可实现更高的峰值功率输出,从而提升雷达的灵敏度或探测距离,输出功率是基于GaAS工艺电路的5倍以上。
SiGe工艺虽然传输的功率不如GaAs,然而该材料成本较低,适用于未来低成本、低功率密度雷达系统的设计。
2 功率输出通常情况下,在给定阵列的口径后,雷达系统所需要的平均功率输出也基本确。
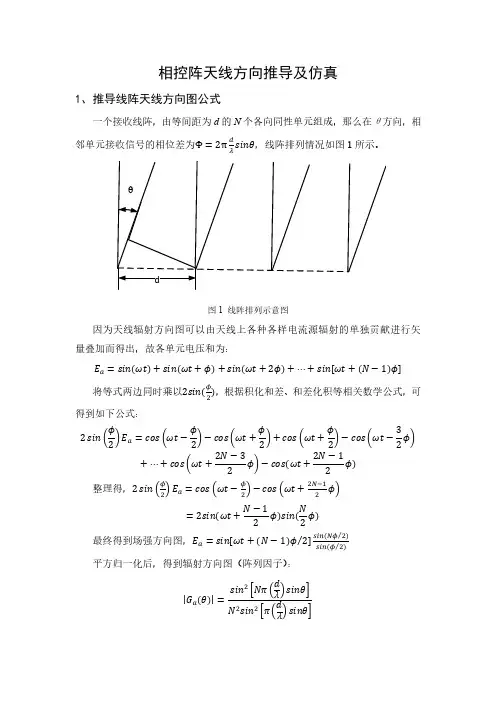
相控阵天线方向推导及仿真1、推导线阵天线方向图公式一个接收线阵,由等间距为d 的N 个各向同性单元组成,那么在θ方向,相邻单元接收信号的相位差为Ф=2πdλsinθ,线阵排列情况如图1所示。
图1 线阵排列示意图因为天线辐射方向图可以由天线上各种各样电流源辐射的单独贡献进行矢量叠加而得出,故各单元电压和为:E a =sin (ωt )+sin (ωt +ϕ)+sin (ωt +2ϕ)+⋯+sin[ωt +(N −1)ϕ]将等式两边同时乘以2sin(ϕ2),根据积化和差、和差化积等相关数学公式,可得到如下公式:2sin (ϕ2)E a =cos (ωt −ϕ2)−cos (ωt +ϕ2)+cos (ωt +ϕ2)−cos (ωt −32ϕ)+⋯+cos (ωt +2N −32ϕ)−cos(ωt +2N −12ϕ)整理得,2sin (ϕ2)E a =cos (ωt −ϕ2)−cos (ωt +2N−12ϕ)=2sin(ωt +N −12ϕ)sin(N2ϕ) 最终得到场强方向图,E a =sin[ωt +(N −1)ϕ2⁄]sin(Nϕ2⁄)sin(ϕ2⁄)平方归一化后,得到辐射方向图(阵列因子):|G a (θ)|=sin 2[Nπ(dλ)sinθ]N 2sin 2[π(dλ)sinθ]上式中,当(dλ)sinθ=0,±1,±2,···±n 时|G a (θ)|取得相等的最大值,但是我们只期望看到(dλ)sinθ=0的情况,取其他值产生的栅瓣是我们所不想见到的,为避免这种情况,特令d <λ。
前面的公式中认定主瓣指向为0°,当主瓣指向θ0方向时,则各向同性单元线阵的归一化辐射方向图为:G (θ)=sin 2[Nπ(dλ)(sinθ−sinθ0)]N 2sin 2[π(d λ)(sinθ−sinθ0)]此时,由于−2≤sin (θ)−sin (θ0)≤2,故防止产生栅瓣的条件为d <λ2⁄。

神通型动中通相控阵卫星天线北方神通,北京,通信技术有限公司神通?型动中通相控阵卫星天线系统产品描述:神通?型Ku卫星双向相控阵天线是国内卫星通信的革命性的、划时代的突破产品,神通?型的超薄(24cm厚度)相控阵天线系统是专为运动载体(飞机、火车、汽车、轮船)的“动中通”实时通信而设计的。
全新理念的天线系统自动搜索、捕获指定的卫星信号,并且在运动载体高速运动过程中,自动控制方位、仰角和极化角,自动跟踪并保持精确指向。
神通?型卫星双向相控阵天线具有非常广泛的应用,特别是应急通信,因为它可以为公共安全部门和第一响应单位提供高速移动的宽带卫星通信链路,不依赖于易受服务中断、自然灾害和人为破坏所影响的地面通信链路。
也由于它不依赖于地面网络,它可以应用于任何需要的领域,特别是那些偏远的、无电信运营商服务覆盖到的地区和专有军事领域。
产品适用领域有:应急体系、军队、武警、公安、国安、消防、交通、能源、环保、自然资源、运输等各行各业。
系统组成:神通?型由超薄的安装于移动载体的相控阵天线和内部的控制器组成。
外部安装天线内置BUC(可外置以增加发射功率)和LNB,控制器为天线提供电源并控制相控阵天线的运动。
系统特点:, 全自动对星;, 采用GPS信号,自动捕获并跟踪卫星(无GPS时可自动盲扫), 运动中自动寻找卫星信号最大值;, 控制系统可以使之快速从视线遮挡中恢复,天线使用机械和电子混合扫描,保持指向精度;, 邻星干扰保护:如果天线指向偏离大于0.5度,发射链路自动关闭,直到指向误差被天线的跟踪系统纠正。
, 设备采用标准机架安装,同时优化设计适用于移动载体,易于安装和维护。
北方神通,北京,通信技术有限公司神通?型性能指标1. 天线主体型号:ST-2K技术指标:频率范围: 极化调整误差: <1?发送: 14.0-14.5 GHz 天线单元:接收: 12.25-12.75 GHz 尺寸: 1360×1200×248mm(L×W×H)数据速率:重量:?40Kg 发送(回传链路):64kbps,4096 Kbps电性能指标 (外置40W BUC)(根据不同的卫星和地区会有变电源: 30VDC化) 功耗: ?70W 接收(前向链路):大于15 Mbps电源接头: TNC 增益:TX: 33.5dBi 射频接头: TNCRX: 33.5dBi 机械性能指标极化:线极化/圆极化(自动控制)俯仰范围: 20? - 70? 上行 EIRP: 49.5dBw(40w BUC)G/T: 9 dB/K @30度方位范围: 360?连续旁瓣电平:<-14dB 跟踪速率: 60?/s 交叉极化:,27dB极化范围: -90º , +90º IF输入/输出: L频段950-2050MHz工作温度 : 捕获和跟踪:信号捕获并锁定:自动,<60秒天线主体单元: -40?,+55?C极化角调整:自动贮存温度: -50º ,+70ºC 跟踪速率: 45?/秒相对湿度: <90% 重新捕获: <20秒仰角捕获误差:<0.3? 运动速度: ?350 Km/h极化角捕获误差:<0.35?北方神通,北京,通信技术有限公司2. 天线控制器天线控制器作为系统的室内单元,主要完成供电,给天线提供控制信号,以及完成人机操作等工作。
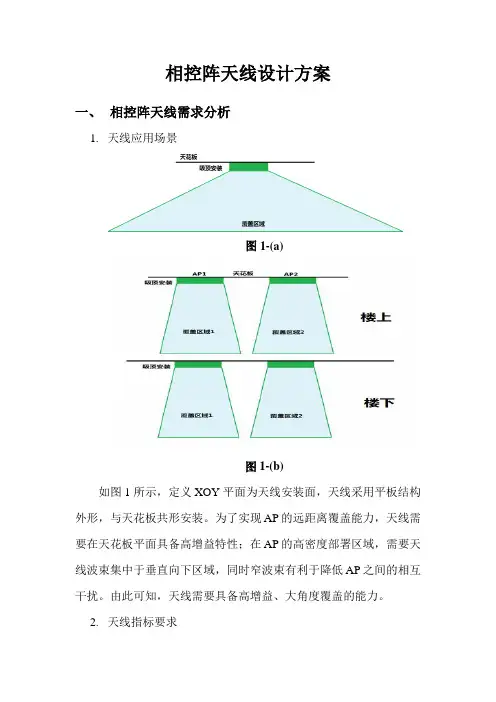
相控阵天线设计方案一、相控阵天线需求分析1.天线应用场景图1-(a)图1-(b)如图1所示,定义XOY平面为天线安装面,天线采用平板结构外形,与天花板共形安装。
为了实现AP的远距离覆盖能力,天线需要在天花板平面具备高增益特性;在AP的高密度部署区域,需要天线波束集中于垂直向下区域,同时窄波束有利于降低AP之间的相互干扰。
由此可知,天线需要具备高增益、大角度覆盖的能力。
2.天线指标要求图25G频段:4.9GHz~5.9GHz在xz/yz面:第一档:theta=90°增益大于5dB第二档:theta=90°增益比第一档增益下降4dB第三档:theta=90°/-90°增益小于-9dBtheta=60°/-60°增益小于-6dB2.4G频段:2.4GHz~2.49GHz在xz/yz面:第一档:theta=90°增益大于3dB第二档:theta=90°增益比第一档增益下降4dB第三档:theta=90°/-90°增益小于-9dBtheta=60°/-60°增益小于-6dB根据图2坐标定义,天线波束需要具备在±90°角度内满足大角度、高增益扫描状态。
图3根据图3阵列布局要求,每个天线子阵采用线阵形式,各自覆盖俯仰0°~90°角度,最终实现整阵对于下半空间的全覆盖。
二、天线设计方案阵列天线的大角度扫描是阵列天线设计的一大难点。
从理论上讲阵列的天线增益满足:阵列增益=单元增益+阵因子增益,天线单元的广角辐射特性决定了阵列波束的宽角扫描特性。
当阵列主波束扫描时,随着扫描角度的不同,其增益也在天线单元方向图的限制范围内改变。
当阵列波束扫描至天线单元的增益降至-3dB 的角度时,阵列增益将减小-3dB。
因此,天线单元的3dB 波束覆盖范围,也是阵列的3dB 波束扫描范围。
第二章 相控阵天线的基础理论 相控阵天线是从阵列天线发展起来的,主要依靠相位变化实现天线波束指向在空间的移动或扫描,亦称电子扫描阵列ESA 天线;虽然用于相控阵雷达的相控阵天线有多种,但相控阵天线均是由多个天线单元,亦称辐射器构成的;天线单元可以是单个的波导喇叭天线、偶极子天线、贴片天线等;在每个天线单元后端都设置有移相器,用来改变单元之间信号的相位关系,信号的幅度变化则通过功率分配/相加网络或者衰减器来实现;在扫描过程中,整个雷达不需要像采用普通阵列天线或者剖物面天线的雷达那样进行机械运动,因此波束指向迅速灵活,且可以实现多波束并行工作,使得雷达具有很强的自适应能力;在相控阵天线的实际使用过程中,线性相控阵天线平面相控阵天线是较为常见的两种形式;下面分别以这两种形式为例,阐述相控阵天线扫描的基本原理;2.1 相控阵天线扫描的基本原理2.1.1 线性相控阵天线扫描的基本原理线性相控阵天线广泛应用于一维相控扫描的相控阵雷达中;根据基本的阵列类型,线性相控阵天线可以划分为垂射阵列和端射阵列;垂射阵列最大辐射方向垂直于阵列轴向,天线波束在线阵法线方向左右两侧进行扫描;相反,端射阵列主瓣方向沿着阵列轴向;由于垂射阵应用最为广泛,因此主要讨论垂射阵;图是一个由N 个天线单元组成的线性阵列原理图,天线单元呈均匀排成一线,途中沿y 轴方向按等间距方式分布,天线单元间距为d ;每一个天线单元的激励电流为(i 0,1,2,...N 1)i I =-;每一单元辐射的电场强度与其激励电流i I 成正比;天线单元的方向图函数用(,)i f θϕ表示;图 N 单元线性相控天线阵原理图阵中第i 个天线单元在远区产生的电场强度为:2(,)ij r i i i i i e E K I f r πλθϕ-=式中,i K 为第i 个天线单元辐射场强的比例常数,i r 为第i 个天线单元至观察点的距离,(,)i f θϕ为第i 个天线单元的方向图函数,i I 为第i 个天线单元的激励电流,可以表示成为:B ji i i I a e φ-∆=式中,i a 为幅度加权系数,B φ∆为等间距线阵中,相邻单元之间的馈电相位差,亦称阵内相移值;在线性传播媒质中,电磁场方程是线性方程,满足叠加定理的条件;因此,在远区观察点P 处的总场强E 可以认为是线阵中N 个辐射单元在P 处辐射场强之和,因此有:21100(,)i j r N N i i i i i i i e E E K I f r πλθϕ---====⋅∑∑若各单元比例常数=1i K ,各天线单元方向图(,)i f θϕ相同,则总场强表示为:210(,)i B j r N ji i i i e E f a e r πλφθϕ---∆==⋅∑假设观察点P 距离天线阵足够远,则可认为各天线单元到该点的射线互相平行;根据远场近似:00cos i i y r r r r id α=⎧⎪⎨=-⎪⎩对幅度:对相位: 因为 cos cos sin y αθϕ=将、式带入式,总场强可进一步简化为:21i(dcos sin )0(,)B N j i i E f a eπθϕφλθϕ--∆==∑ 定义式中21i(dcos sin )0(,)B N j i i F a eπθϕφλθϕ--∆==∑为阵列因子,则该式说明了天线方向图的一个重要定理——乘法定理;即阵列天线方向图函数(,)E θϕ等于天线单元方向图函数(,)f θϕ与阵列因子21i(dcos sin )0(,)B N j i i F a eπθϕφλθϕ--∆==∑的乘积;为了便于讨论和易于理解线性相控阵天线扫描原理,通常将图简化为图所示情况;假定天线单元方向图(,)f θϕ足够宽,满足全向性,在线阵天线波束扫描范围内,可忽略其影响时,线阵天线方向图函数可表示为:21i(dsin )0()B N j i i F a eπθφλθ--∆==∑式中,i a 为幅度加权系数,B φ∆为相邻单元之间的馈电相位差,亦称阵内相移值,且2=sin B B d πφθλ∆,B θ为天线波束最大指向;图 N 单元线性相控天线阵简化图 令2sin d πφθλ∆=,它表示相邻单元接收到来自θ方向信号的相位差,可称为相邻单元之间的空间相位差;若令B X φφ∆-∆=,对均匀分布照射函数,1i a =,可得:1()1jNXjX e F eθ-=-,由欧拉公式化简得到: 12sin2()1sin 2N j X N X F e X θ-= 对式取绝对值,考虑到实际线阵中单元数目N 较大,在天线波束指向最大值附近X较小;根据等价无穷小替换,sin 22X X ≈,故得到线阵的幅度方向图函数为: sin (sin sin )sin 2|F()|N (sin sin )2B B N N d X N N N X d πθθλθπθθλ-==- 可见,线性相控阵天线方向图函数|F()|θ是以辛格函数表示的;由此,可以得到线阵天线的基本性能;当02N X =时,|F()|θ有最大值,|F()|1θ=;此时波束指向B θ的表达式为: arcsin()2B B dλθφπ=∆ 由式可知,通过改变阵内相邻单元之间的阵内相移值B φ∆,即可改变天线波束最大值指向;而B φ∆是通过每个天线单元后端设置的移相器实现的;2.1.2 平面相控阵天线扫描的基本原理平面相控阵天线是指天线单元分布在平面上,天线波束在方位与仰角两个方向上均可以进行相控扫描的阵列天线;目前,大多数远程、超远程相控阵雷达以及新的三坐标相控阵雷达均采用平面相控阵天线;一个平面相控阵天线可以分解为多个子平面相控阵天线或者分解成多个线阵;相应的,由发射机至各天线单元的信号功率分配网络与由天线单元到接收机之间的功率相加网络也会随之变化;平面相控阵天线单元的排列方式主要有两种:矩形格阵排列和三角形格阵排列,后者可以看成是由两个单元间距较大的按照矩形格阵排列的平面相控阵天线所构成;图所示为平面相控阵天线示意图,天线阵列位于yoz 平面上,共有M N ⨯个天线单元,沿y 方向的N 个阵元以间距y d 均匀排列,沿z 方向的M 个阵元以间距z d 均匀排列,从而形成矩形栅格阵的平面阵;图等间距排列的平面相控阵天线示意图设目标所在方向以方向余弦表示为(cos ,cos ,cos )x y z ααα,则由各天线单元到目标方向之间存在的路程差决定了信号传输过程中的相位差;因此,沿y 轴和z 轴相邻天线单元之间的空间相位差可分别表示为:2cos 2cos y yy z z z d d πφαλπφαλ⎧∆=⎪⎪⎨⎪∆=⎪⎩第(i,k)个单元与第(0,0)个参考单元之间的空间相位差为ik y k i k φφφ∆=∆+∆;若天线阵内由移相器提供的相邻天线单元之间的阵内相位差,沿y 轴与z 轴刻分别表示为:.0.02cos 2cos By y y Bz z z d d πφαλπφαλ⎧∆=⎪⎪⎨⎪∆=⎪⎩式中,.0cos y α与.0cos z α分别表示波束最大值指向的方向余弦;当以球坐标(,)θϕ表示时,根据图可知:.00000cos cos sin cos sin y z αθϕαθ=⎧⎪⎨=⎪⎩ 第(i,k)个单元与第(0,0)个参考单元之间的阵内相位差为Bik By Bz i k φφφ∆=∆+∆;记By αφ=∆,Bz βφ=∆,则Bik i k φαβ∆=+,α、β在此处表示简化的阵内相移值;设第(i,k)个天线单元的幅度加权系数为ik a ,类似于线阵天线方向图函数的求解过程,在忽略天线单元方向图的影响条件下,平面相控阵天线的方向图函数(cos ,cos )y z F αα可表示为:1111[i()k()]()0000(cos ,cos )y z ik Bik y N M N M j j z ik ik i k i k F a ea e φαφβφφαα----∆-+∆-∆-∆======∑∑∑∑考虑到cos cos sin cos sin y z αθϕαθ=⎧⎨=⎩ 将带入中,得到: 2211[i(cos sin )k(sin )]00(,)y z N M j d d ik i k F a eππθϕαθβλλθϕ---+-===∑∑通常情况下,天线照射口径函数为等幅分布,即不进行幅度加权,幅度加权系数1ik a =,满足均匀分布;此时平面相控阵天线的方向图函数可表示为:2211ji(cos sin )k(sin )1200(,)|F (,)||F ()|y z N M d j d i k F ee ππθϕαθβλλθϕθϕθ----===⋅=⋅∑∑式表明,在等幅分布条件下,平面相控阵天线方向图可以看成是两个线阵天线方向图函数的乘积;其中1|F (,)|θϕ表示水平方向线阵的天线方向图,2|F ()|θ是垂直方向线阵的天线方向图;与线阵方向图的推导类似,这里有:122sin (d cos sin )2|(,)|2(d cos sin )22sin (d sin )2|F ()|2(d sin )2y y z z N F N N M M M πθϕαλθϕπθϕαλπθβλθπθβλ⎧-⎪=⎪⎪-⎪⎨⎪-⎪=⎪-⎪⎩由可以看出,分别改变相邻天线单元之间的相位差α、β值,即可实现平面相控阵天线波束的扫描,而α、β值的改变仍然是通过每个天线单元后端设置的移相器实现的;2.2 相控阵天线的基本构成相控阵天线理论和技术的蓬勃发展,使得相控阵天线在电路设计、结构形式和微波元件及控制方法等方面千差万别29;通常情况下,相控阵天线是由天线阵面、移相器、馈线网络以及相应的控制电路等几部分组成;如果相控阵天线的馈电网络中不含有源电路,则称此天线为无源相控阵天线;如果天线的各个单元通道中含有有源器件,例如信号功率放大器、低噪声放大器、混频器等,则称此天线为有源相控阵天线;2.2.1 天线阵面相控阵天线阵面通常是由几百个到几万个不等的通过相位进行控制的通道激励辐射单元构成;这些辐射单元可以是单个的波导喇叭天线、偶极子天线、贴片天线等;当这些辐射单元分布于平面上,称为平面相控阵天线;分布于曲面上,称为曲面相控阵天线;如果该曲面与雷达安装平台外形相一致,则成为共形相控阵天线conformal phased array antenna;相控阵天线单元的排列方式主要有矩形格阵排列、三角形格阵排列以及六角形格阵排列等;2.2.2 馈线网络相控阵天线是一个多通道系统,一般均包含大量天线单元,在发射机、接收机与天线阵各单元之间必须有一个多路馈线网络;通过发射机输出端将信号送至天线阵面中各个辐射单元或将天线阵面中各个辐射单元接收到的信号送至接收机输入端的过程,称为馈电,而将为阵列中各个天线单元通道提供实现波束扫描或改变波束形状所要求的相位分布称为馈相;其中的馈电方式主要包括强制馈电与空间馈电两种,改变波束形状所要求的各通道激励相位是通过微波器件—移相器实现的;强制馈电constrained feeding 亦成为约束馈电;该系统采用波导、同轴线、板线、微带线等微波传输线实现功率分配与相加网络;由于发射激励信号发射机输出信号以及接收机输入信号均只在传输线中传播,辐射泄漏很小,馈电网络的电磁兼容性容易得到保证;空间馈电亦称光学馈电,主要分为透镜式与反射式两种;与强制馈电相比较,信号场强在传输过程中不是约束在波导、同轴线或者微带传输线中,而是在自由空间传播,因此空间馈电网络实际上是采用空馈的功率分配/相加网络;采用空间馈电具有许多优点;例如,可以省掉许多加工要求严格的高频微波器件,在雷达信号波长较短时,可利用空间馈电形成单脉冲测角所需的和、差多波束,与强制馈电相比具有更为明显的优点;2.2.3 移相器各种不同类型的移相器是相控阵天线馈线网络实现馈相的关键器件,对它的要求是:移相的数值精确、性能稳定;宽频带、大功率容量;便于快速控制等30;移相器主要分为以采用压控变容二极管的场效应晶体管FET 模拟型移相器和以采用PIN 二极管作开关器件的通过式数字型移相器两大类;但是,为了便于计算机对天线波束扫描进行可编程控制,控制电压或者电流信号均是按照二进制方式产生的,移相器的每一位受二进制数字信号中的一位控制;因此,无论模拟型移相器还是数字型移相器,它们提供的相移量均是按照二进制方式变化的,即仍然是离散的,因而在实际使用中,多采用数字式移相器;设数字式移相器位数为k ,k 为正整数,则移相器的最小相移值min B φ∆为:min 22B k πφ∆= 故k 位数字移相器共有2k 种不同移相值,以四位数字移相器为例,如图所示;最小相移值为min 4222.52B πφ∆== ,且高一位移相器的相移量是低一位移相器相移量的2倍;因此,四位数字移相器可以看成是四个相移数值分别为22.54590180、、、的子移相器串联而成;每一位子移相器均受到一位二进制数字信号的控制;其中0对应不移相,1对应移相;图 四位数字式移相器示意图例如,当控制信号编码为0101时,四位数字式移相器产生的相移量为:即控制信号编码为0101时,代表移相器提供112.5的相移量;从理论上讲,当移相器正常工作,不存在故障情况下,四位数字式移相器可提供从0到°范围内,每间隔最小相移值°取一个值,总共可提供42=16种相移值;为了节省无线电元件和电路、为了简化结构和提高可靠性,大多数现代相控阵天线的移相器控制都是以行—列原理为基础;移相器的控制电路可分为两种主要类别;第一类允许独立控制移相器的所有电路,即此种电路内的每一个移相器可以处于任何一种状态而与其余移相器的状态无关;第二类不允许在个别移相器组内有时甚至是全部实现独立控制的电路;在此种情况下,移相器控制码由行和列二进制码的和组成带进位,移相器位于行和列的交点上;有L 种状态的移相器,在通常情况下,它的状态按沿行和列传送的数之和按模L 计算,也就是=()mod L r c L L L +;这样的电路确保同时控制所有的移相器和形成使相控阵天线波束指向任意方向所必需的相位波前;第二类电路比第一类电路速度快,但控制的灵活性较小;2.3 相控阵天线可能的故障类型及影响分析2.3.1 故障类型相控阵天线经常产生的故障是指移相器控制电路的故障30,由于该故障使得移相器或者移相器组的一位或者几位未接通;此外,在有源相控阵天线中,由于通道放大器工作异常,导致辐射器没有激励也是典型故障形式之一;以常见的二进制原理构成的移相器情况为例,来讨论相控阵天线可能的故障类型及其对天线性能的影响;k 位二进制数字式移相器通常是由k 个移相数值不同的离散位亦称子移相器串联构成;每一个离散位都包含两种状态,选通和未选通,对应的传输系数Γ有两个值:221k j m e πΓ=以及00m Γ=,其中1,2...m k =;设相控阵天线含有N 个移相器,移相器状态总数为2k L =;常见的故障类型有两类:一是无激励故障,此时通道激励复振幅{0,1,2...,0,1...1}nl w n N l L ===-;二是离散位失效故障,此时01{1,1,2...}m m m k Γ=Γ==;以三位二进制数字移相器(k 3,8)L ==为例,此时移相器可能的故障类型见图所示;图 三位二进制数字移相器的可能故障类型2.3.2 影响分析故障模式的差异性对相控阵天线的特性参数影响不同;研究故障模式对雷达辐射特性的影响是进行测试诊断的前提和基础,因此必须对相控阵天线的故障模式及影响进行分析;为了验证在所采用的阵列形式中,阵元失效对天线性能的影响程度,采用MATLAB 软件,建立了88⨯元半波阵子矩形平面相控阵天线模型,仿真了当其内部分别含有一个、两个、以及四个故障单元情况下,对天线辐射特性造成的影响;此处采用天线方向图来刻画故障模式的差异性对相控阵天线特性参数的影响程度;所谓天线方向图,是指在离天线一定距离处,辐射特性场强振幅、相位、极化与空间角度关系的图形;完整的方向图是一个三维的空间图形,它是以天线相位中心为球心坐标原点,在半径r 足够大的球面上,逐点测定其辐射特性绘制而成;测量场强振幅,就得到场强方向图;测量功率,就得到功率方向图;测量极化,就得到极化方向图;测量相位,就得到相位方向图,若不另加说明,本论文提及的方向图均指场强振幅方向图;由于三维空间方向图的测绘十分麻烦,实际工作中,一般只需测得水平面和垂直面即XY 平面和XZ 平面的方向图即可;天线方向图是衡量天线性能的重要图形,可以从天线方向图中观察到天线的各项参数,主要包括:主瓣宽度,旁瓣电平,前后比,方向系数等;建立的88⨯元半波阵子矩形平面相控阵天线模型参数如下:天线工作在S 波段,工作频率3f GHz =,x 方向间距为 5.865dx cm =,y 方向间距为 6.517dy cm =,臂长mm l 505.02==λ,半径mm a 5.0=;88⨯元半波阵子矩形平面相控阵天线模型如图所示;图 88⨯元半波阵子矩形平面相控阵天线模型当给天线各个单元施加30dB -泰勒分布激励时,得到88⨯元半波阵子矩形平面相控阵天线无故障、单故障、双故障、四故障情况下的三维立体方向图和二维平面方向图,分别如图~所示;图 无故障情况下半波阵子矩形面阵三维与二维方向图图 单故障情况下半波阵子矩形面阵三维与二维方向图图双障情况下半波阵子矩形面阵三维与二维方向图图 四障情况下半波阵子矩形面阵三维与二维方向图采用电磁仿真软件HFSS,建立88⨯元半波阵子矩形平面相控阵天线模型,参数如前所述;仿真完毕之后利用软件后处理分析功能,得到无故障与三种典型故障的方向图最大增益、最大副瓣电平以及辐射功率等辐射特性参数的变化情况如表1所示;表1 故障前后88⨯元面阵辐射特性变化统计由表1可知,随着故障单元个数的增多,无论阵面出现的是单故障,还是多故障,都会使天线的增益下降,最大副瓣电平抬高,辐射功率降低,即使得天线的辐射特性变差;在排除测量误差的前提下,通过比对正常与故障情况下天线方向图的差异性,为后续进行测试诊断工作提供了一条简便直观的有效途径;。
图1有源相控阵天线G/T值的测试原理1.1直接法基本原理信号源发射一定功率的测试信号,经相控阵天线接收后到达频谱仪。
根据功率传输方程可得频谱仪接收到的信号功率可表示为:,(1)式中:为信号源发射功率,为标准天线增益,a为相控阵天线接收增益,net为相控阵天线有源网络增益,为测试系统收发端空间损耗,为相控阵天线与频谱仪之间线缆损耗。
根据等效噪声温度理论,系统各部分组件引入的噪声均可等效为热噪声;其输出最大噪声功率的能力,使用等效噪声温度表征。
器件输出的最大噪声功率可表示为[6-7]:out=,(2),为有源相控阵天线的等效噪声温度,,有源相控阵天线和功率谱密度0的计算公式将式(4)转换为对数关系,则式(4)可进一步推导为:,(式中:+-项可表示为信号源经标准天线后到达相控阵天线口面位置处的等效辐射功率,和0分别为频谱仪所接收到的信号功率和噪声功率谱密度。
在测试过程中测量出上图2相控阵天线等效原理间接法是将相控阵天线系统做等效处理。
将整个无源天线阵列等效为增益为a的天线,后端有源网络等效为增益为的有源器件。
有源相控阵天线的等效噪声温度参考点位置见图2[8]。
根据等效输入噪声理论,等效噪声温度包含两部分:一部分为天线阵列的噪声温度;另一部分为后端有源网络的等效输入噪声温度,所以值应表征为相控阵天线系统的品质因数,而非无源天线面的品质因数。
由于有源相控阵天线的高度集成性,无源天线面和后端有源网络无法分离,造成其G/T值测试时无法单独测量的值。
但是通过图2所示天线等效结构以及公式推导可以,a net定义为相控阵天线有源接收总增益,a net相控阵天线有源输出总噪声温度。
有源接收总增益可以通过与标准接收天线对比的方式测量出,而有源输出总噪声温度因子方法测量得到[9-10]为已标校的低噪声放大器的噪声温度,度。
可得相控阵天线有源输出总噪声温度为:。
将有源输出总增益和总噪声温度测量出后即可获得相控值测试方法图3有源相控阵天线G/T值测试系统2.1直接法直接法测量G/T值主要依据式(5)对相控阵天线接收信号功率和噪声功率谱密度、相控阵天线口面位置处的等效辐射功率项目分别进行测量,步骤如下:①按图3所示连接测试系统,加电预热使测试系统仪器设备工作正常;②将标准接收天线安装在测试转台,设置信号源的工作频率并发射一单载波信号,调整发射天线与标准接收天线极化为同极化,使发射天线对准标准接收天线,并记录频谱仪接收功率r0;③将标准接收天线替换为被测天线,被测天线与标准接收天线设为同极化,设置被测天线为法向波束;④记录当前角度下频谱仪接收功率r,关闭信号源,标记噪声功率谱密度0;⑤改变被测天线俯仰波束角度,控制转台方位或俯仰轴偏移相同角度使被测天线波束理论对准发射天线,重复步骤为,其中为标准接收天线增益(单位dBi),为频谱仪与被测天线间的插损(单位dB)。
相控阵天线的基本原理介绍相控阵天线是目前卫星移动通信系统中最重要的一种天线形式,由三个部分组成:天线阵、馈电网络和波束控制器。
基本原理是微处理器接收到包含通信方向的控制信息后,根据控制软件提供的算法计算出各个移相器的相移量,然后通过天线控制器来控制馈电网络完成移相过程。
由于移相能够补偿同一信号到达各个不同阵元而产生的时间差,所以此时天线阵的输出同相叠加达到最大。
一旦信号方向发生变化,只要通过调整移相器的相移量就可使天线阵波束的最大指向做相应的变化,从而实现波束扫描和跟踪。
相控阵天线有相控扫描线天线阵和平面相控阵天线。
图一图一 N单元相阵远区观察点P处的总场强可以是认为线阵中N个单元在P点产生的辐射场强叠加:图二线性相控阵天线这一天线阵的方向图函数为:图三平面相控阵天线相控阵在快速跟踪雷达、测相等领域得到广泛的应用,它可以使主瓣指向随着通信的需要而不断地调整。
相控阵为主瓣最大值方向或方向图形主要由单位激励电流的相对来控制天线阵。
通过控制阵列天线中辐射单元的馈电相位改变方向图形状的天线。
控制相位可以改变天线方向图最大值的指向,以达到波速扫描的目的。
在特殊情况下,也可以控制副瓣电平、最小值位置和整个方向图的形状。
用机械方法旋转天线时,惯性大、速度慢,相控阵天线克服了这已缺点,波速的扫描高。
它的馈电相一般用电子计算机控制,相位变化速度快,即天线方向图最大值指向或其他参数的变化迅速。
这是相控阵天线的最大特点。
一般相控阵天线应对每一辐射单元的相位进行控制。
为了节省移相器和简化控制线路,有时几个辐射单元共用一个移相器。
相控阵天线的关键器件是移相器和天线辐射单元。
移相器分连续式移相器和数字式移相器两种。
连续式移相器的移相值可在0°~360°范围内连续变化,数字式移相器的移相值是离散的,只能是360×(1/2)^n的整数倍,移相器应保证在一定的频率范围内获得所需要的移相值。
天线辐射单元的设计应使一定移相范围内和一定频率范围内的输入阻抗的变化尽可能小,以保证发射机正常工作,防止由于射频信号的多次反射而出现寄生副瓣和方向图中出现凹点的现象。