矿用矮机身悬臂式掘进机的设计
- 格式:docx
- 大小:37.39 KB
- 文档页数:6
悬臂式掘进机智能系统设计及其位姿估计与运动学建模随着科技的不断进步,智能化技术在各个领域得到了广泛应用。
在工程设备领域,悬臂式掘进机智能系统的设计及其位姿估计与运动学建模也取得了显著的进展。
悬臂式掘进机是一种用于矿山、建筑等工程领域的重要设备,其主要功能是进行地下或地面的掘进工作。
然而,由于掘进机在使用过程中需要面对各种复杂的地质环境和工作要求,传统的人工操作方式已经不能满足生产效率和安全性的需求。
为了提高悬臂式掘进机的工作效率和安全性,研究人员开始引入智能化技术。
智能系统能够通过感知、决策和执行等环节,对掘进机进行自主控制和操作。
其中,位姿估计和运动学建模是智能系统的重要组成部分。
位姿估计是指通过传感器获取掘进机在空间中的位置和姿态信息。
利用激光雷达、惯性导航系统等传感器,可以实时获取掘进机的位置、姿态、速度等参数。
通过对这些参数进行分析和处理,可以准确地估计掘进机在三维空间中的状态。
运动学建模是指对掘进机的运动进行建模和分析。
通过对掘进机的结构和动力学特性进行建模,可以分析掘进机在不同工况下的运动规律和性能指标。
运动学建模可以帮助设计人员优化掘进机的结构,提高其工作效率和稳定性。
在悬臂式掘进机智能系统设计中,位姿估计和运动学建模相互配合,共同实现对掘进机的智能化控制。
通过实时获取掘进机的位姿信息,智能系统可以根据预设的工作要求,自主地调整掘进机的运动轨迹和工作参数,实现更高效、更安全的掘进作业。
总之,悬臂式掘进机智能系统的设计及其位姿估计与运动学建模是一个复杂而关键的课题。
通过引入智能化技术,可以提高掘进机的工作效率和安全性,推动工程设备领域的发展。
未来,随着智能化技术的不断进步,悬臂式掘进机智能系统将迎来更加广阔的应用前景。
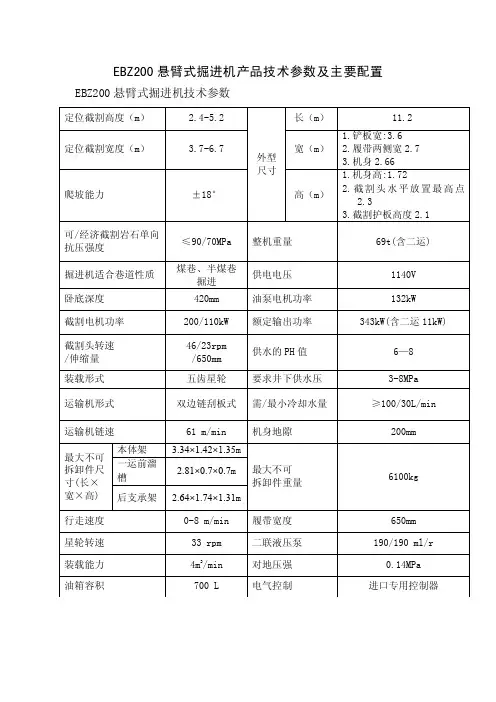
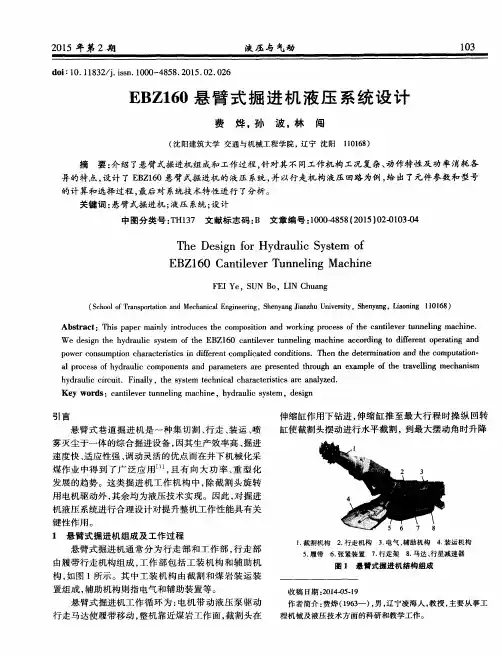
科技资讯 SC I EN C E &TE C HN O LO G Y I NF O R MA T IO N 工 业 技 术EBZ150II型悬臂式掘进机是集截割、装运和行走于一体的综合掘进设备,属于悬臂式纵向截割的大断面掘进机。
本机采用了电机和液压混合传动方式,操作简便,运转平稳、可靠。
配有内喷雾和外喷雾,有效抑制截割过程中产生的粉尘,本机采用独特的分装运系统,降低了截割煤(岩)过程中装运机构的事故发生率,改善了装运效果,提高了装运能力。
基于如此多优点,跃进矿矿选用此型设备,但在实际生产过程中,也暴露了很多问题:首先是开式主铲板产生回头煤太多,易产生第一运输机上小刮板机卡死现象。
其次液压系统也不适合跃进矿生产。
为此进行了优化设计及改进使掘进机能更好地适用于矿井生产。
1 EBZ150II型悬臂式掘进机1.1主要结构及功能EBZ150II悬臂式掘进机在液压、电气控制下,可以轻松灵活地完成掘进作业,主要由截割部、铲板部、第一运输机、本体部、行走部、后支承部、润滑系统、液压系统、水系统、电气系统和护板部等组成。
掘进机主要功能是实现连续切割、装载和运输作业。
适用于煤巷、半煤岩巷及软岩的巷道掘进,最大截割面积24m2,截割硬度为80MPa。
适用环境温度为0~30℃。
1.2施工特点(1)EBZ150II型掘进机有高低2种掘进速度,低速切割扭矩大,高速切割效益高。
(2)掘进机掘进速度快,巷道成形好,安全系数高。
(3)切割振动小,有可提高机器稳定性的支腿装置,工作稳定性能好,使得整机可靠性能提高。
2 应用中优化设计及改进2.1运输系统改进EBZ150II型掘进机整个截割部通过升降液压缸和销轴安装在主机架上,在回转和升降液压缸的联动作用下,配合截割头的旋转从而完成破落爆岩的动作,装运部是把破落下的煤岩装运到掘进机后部的第二运输机上,转运部由装截部和第一运输机组成,装载部是由铲板、星轮和驱动马达等组成,而问题就出在第一运输机与铲板上,第一运输机的构造,是由绕过机头链轮和机尾链轮的无极循环刮板链作为牵引机构,以溜槽作为承载机构,使链轮带动与之啮合的刮板链连续运转将装在溜槽上的煤,拉到尾部卸载。
1 绪论悬臂式掘进机作业线主要由主机与后配套设备组成。
主机把岩石切割破落下来,转运机构把破碎的岩渣转运至机器尾部卸下,由后配套转载机、运输机或梭车运走。
悬臂式掘进机的切割臂可以上下、左右自由摆动,能切割任意形状的巷道断面,切割出的表面精确、平整,便于支护。
履带式行走机构使机器调动灵活,便于转弯、爬坡,对复杂地质条件适应性强。
悬臂式巷道掘进机具有掘进速度快,巷道成形好,便于与其它设备配套组成综掘作业线以及成本较为合理等优点, 因而应用广泛。
近年来掘进机不仅广泛用于煤及软岩道的掘进,在中等硬度的半煤岩巷道掘进中也获得良好的技术经济效果。
国外的某些重型掘进机已能切割抗压强度达170MPa 的硬岩。
据统计,目前国外各主要产煤国采用掘进机掘进的巷道占采准巷道的40%以上。
而我国综掘比率为8%左右,与国外先进水平相比尚存在很大差距, 与我国煤炭生产的需要, 特别是现代化高产高效矿井建设的需要也是极不相适应的, 因此, 我国掘进机的研制开发以及推广应用, 还需作大量工作。
1.1国外掘进设备及综掘技术发展现状-1.1.1 切割能力稳定提高掘进机经历了切割软煤、硬煤及半煤岩的过程。
近期一些重型掘进机已能切割硬岩。
目前国外矿山应用的各种型号的悬臂式掘进机约4 000余台。
一般来说,这类悬臂式掘进机的重量为20~160t,最大切割功率已达408kW,切割岩石的抗压强度最高可达170MPa。
据报道, 日本成功地使用TM 60K 型掘进机掘进全岩巷引水隧道, 岩石硬度高达170~200M Pa。
目前最大的WAV 408 型掘进机重达160 t, 切割功率可达408 kW , 定位切割断面可达m。
87.521.1.2 机器的可靠性高先进的制造技术为基础, 从原材料质量到零部件的加工精度都能严格控制, 又有优越的国际协作条件, 选购外购外协件的范围宽广, 有效地保证了主机的质量水平。
此外, 近年来广泛地采用了可靠性技术, 其突出表现为简化机械结构、采用降额设计。
A5市地铁1号线工程施工组织设计〔方案〕报审表工程名称:市地铁1号线工程编号:注:本表用于工区施组或方案报审,一式三份,项目监理机构、建设单位、施工单位各一份。
地铁1号线土建二标01工区悬臂式掘进机掘进施工方案中铁二十二局集团市地铁1号线一期工程土建二标01工区二〇一七年四月二十五日目录第一章工程概况11.1设计概况11.2周边环境与建筑物情况51.3周边管线61.4工程地质与水文地质7第二章目前施工进展与掘进机选用背景8第三章悬臂式隧道掘进机施工工艺、方法8 3.1施工准备93.2掘进机掘进施工人员、机械配置93.3悬臂式掘进机切割方式103.4悬臂掘进机出料运输方式113.5悬臂掘进机施工方案123.6掘进施工后支护方案14第四章悬臂式掘进机施工优点与缺陷14 4.1悬臂式掘进机施工优点144.2悬臂式掘进机施工缺陷15第五章初期支护155.1钢格栅制作与安装155.2锁脚锚杆施工185.3中空注浆锚杆施工195.4喷射砼施工21第六章质量管理体系与措施25 6.1质量管理体系256.2关键工序质量保证措施266.2.1质量控制和保证措施266.2.2关键工序质量保证措施306.2.3成品保护措施346.2.4质量缺陷控制措施35第七章安全管理体系与保护措施37 7.1安全保证体系377.1.1安全组织机构377.1.2建立健全安全生产责任制387.1.3安全教育与培训437.1.4安全检查制度447.2安全保证措施447.2.1开挖安全技术措施447.2.2开挖支护安全措施457.2.3土方吊运与运输安全措施457.2.4施工机械安全控制措施467.2.5高处作业安全技术措施477.2.6施工用电安全技术措施48第八章风险分析与应急预案50 8.1应急指挥机构成员职责与分工508.1.1项目应急指挥领导小组508.1.2应急指挥指挥人员职责508.1.3装备和通讯联系方式518.1.4救援物资的准备538.1.5事故处置538.2开挖过程施工风险目标确定与对策538.2.1地面建〔构〕筑物沉降变形548.2.2临时停电558.2.3消防568.2.4高处坠落事故568.2.5拱顶掉块、片帮、塌方事故57 8.3事故调查分析和编写事故调查报告59第一章工程概况1.1设计概况路站为明暗结合车站,团岛二路南侧和明月峡路东侧规划地块采用明挖法施工,团岛二路和路下方采用暗挖法施工。
机械、液压部分一、概述1.1 产品特点EBZ-125XK是西安煤矿机械厂与科研院校合作开发的中型悬臂式掘进机。
该机主要特点是:1)结构紧凑、适应性好、机身矮、重心低、操作简单、检修方便;2)炮头采用具有36把镐型截齿、齿座呈螺旋线形排布的球微锥形截割头;3)有低速大扭矩液压马达直接驱动的第一运输机;4)有星轮与低速大扭矩马达连接成一体的弧形三齿星轮装料装置;5)有马达+减速机构形式的行走部;6)有滑动式行走结构上用的耐磨板;7)有为液压锚杆钻机及二运输机留的液压接口;8)电气系统有失压、短路、过载、温度、瓦斯断电等保护功能。
1.2 主要用途、适用范围EBZ-125XK型悬臂式掘进机主要是为煤矿综采及高档普采工作面采掘巷道掘进服务的机械设备。
主要适用于煤及半煤岩巷的掘进,也适用于条件类似的其它矿山及工程巷道的掘进。
该机可经济切割单向抗压强度≤60MPa的煤岩,可掘巷道最大宽度(定位时)5m,最大高度3.75m,可掘任意断面形状的巷道,适应巷道坡度±160。
该机后配套转载运输设备可采用桥式胶带转载机和可伸缩式带式输送机,实现连续运输,以利于机器效能的发挥。
1.3 产品型号、名称及外形产品型号、名称为EBZ-125XK型掘进机,外形参见图l。
1.4型号的组成及其代表意义设计代号截割机构功率(KW)纵轴式截割机构悬臂式掘进机掘进设备二、主要技术参数2.1总体参数机长 8.6m机宽 2.1m机高 1.55m地隙 250mm截割卧底深度 240mm接地比压 0.14MPa机重 35t总功率 190kW可经济截割煤岩硬度≤60MPa可掘巷道断面 9~18m2最大可掘高度 3.75m最大可掘宽度 5.0m适应巷道坡度±160机器供电电压 660/l140V 2.2 截割都电动机型号 YBU-125功率 125kW转速 1470 r/min 截割头转速 55 r/min截齿镐形最大摆动角度上 420下 3l0左右各390 2.3 装载部装载形式三爪转盘装运能力 180m3/h铲板宽度 2.5m/2.8m铲板卧底 250mm铲板抬起 360mm转盘转速 30r/min2.4 刮板输送机运输形式边双链刮板槽宽 510mm龙门高度 350mm链速 O.93m/s锚链规格18×64mm张紧形式黄油缸张紧2.5 行走部行走形式履带式(液压马达分别驱动) 行走速度工作3m/min调动6m/min接地长度 2.46m制动形式摩擦离合器履带板宽度 500mm张紧形式黄油缸张紧2.6 液压系统系统额定压力:油缸回路16MPa行走回路 16MPa装载回路 14Mpa输送机回路 14Mpa锚杆钻机回路 10MPa系统总流量: 450L/min泵站电动机:型号 DSB-55Q功率 55kW转速 1470r/min泵站三联齿轮泵排量 63/40/40ml/r泵站双联齿轮泵排量 63/40ml/r锚杆泵站电动机:型号预留功率 15kW转速 1470r/min锚杆泵站双联齿轮泵排量 32/32ml/r油箱:有效容积 610L冷却方式板翅式水冷却器油缸数量: 8个2.7 喷雾冷却系统灭尘形式内喷雾、外喷雾供水压力 3MPa外喷雾压力 1.5MPa流量>63L/min冷却部件切割电动机、油箱2.8 电气系统供电电压 660/1140V总功率 195kW隔爆形式隔爆兼本质安全型控制箱隔爆型三、主要结构和工作原理EBZ-125XK型掘进机主要由截割部、装载部、刮板输送机、行走部、机架和回转台、液压系统、水系统及电气系统等部分组成,参见图l。
前言掘进机在矿山井下设备中属于大型机械设备,是巷道掘进机械中重要的一种,是实现掘进机械化的关键。
由于它是集矿岩的破碎、装载和转运于一身,因此它的结构复杂,对设计和制造的要求也是多方面的。
掘进机在巷道掘进中的使用,把工人从繁重的体力劳动中解放出来。
随着我国经济建设发展步伐的加快,对能源的需求量增加,必然要求加大开采强度。
则巷道掘进速度必须大幅度提高,才能满足煤炭生产的需要。
要完成艰巨的巷道掘进任务,必须尽快研制出高生产率和高可靠性的掘进机械。
加快掘进机的研制速度,已成为保证煤炭生产发展的关键。
全套图纸,加153893706我国对悬臂式掘进机技术的研究始于20世纪60年代中期,通过对引进型掘进机的消化吸收和国产化工作积累了一些设计悬臂式掘进机的初步经验,但当时研究规模较小,成效甚微。
我国煤矿真正推广应用悬臂式掘进机则是在1979年引进了100余台国外产品以后。
在此后的20多年中,我国在引进悬臂式掘进机产品及制造技术的同时,翻开了自主开发研制、规模生产的一页。
目前,国内掘进机发展水平相对落后,巷道掘进成为煤矿发展的一个瓶颈,制约着煤炭工业的高产与发展。
目前我国掘进机机型很多,其中以中小型和重型机型占多数,S100型和AM50型是中小型机的代表,S200, EBJ160和LH-1300重型机的代表,其中中小型机的市场占有率较高。
由于多年来一直没有进行大的、突破性的改进,已不能很好地满足高效掘进的要求。
而以5200为代表的重型掘进机,由于体积和重量偏大,存在工作时调车困难等不利因素,该机型对地质条件及煤层要求又高,因此其市场空间越来越小。
而以S100为代表的中机型掘进机,通过多年使用,用户反映良好,但不能完全适应煤矿生产高产高效的需要。
因此,研制一种具有一定先进性、可靠性、适应性和高效性,截割功率介于100-15OkW之间的中型掘进机已成为煤机市场的一种需求[1]。
各国早期研制的悬臂式掘进机都是以煤炭为作业对象,机重在13.17吨之间、切割功率在30KW左右的轻型机,代表机型是前苏联的二k-3型掘进机。
![一种煤矿开采用悬臂式掘进机[实用新型专利]](https://uimg.taocdn.com/2e8c0df7c5da50e2534d7fc6.webp)
专利名称:一种煤矿开采用悬臂式掘进机
专利类型:实用新型专利
发明人:张永忠,郭晓鹏,秦利欧,其他发明人请求不公开姓名申请号:CN201920769697.7
申请日:20190527
公开号:CN210460651U
公开日:
20200505
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种煤矿开采用悬臂式掘进机,包括掘进机本体,所述掘进机本体的一端通过回转台连接有切割部件,所述切割部件的一端通过气缸连接有连接座,连接座的一端连接有截割头,切割部件的上端通过螺栓安装有水箱,所述水箱的上表面固定连接有风扇,水箱的内部安装有水泵,水泵的输出端连接有第一软管。
本煤矿开采用悬臂式掘进机,在连接座上连接有弧形水管,通过水泵抽水,雾化喷头喷水,加快浮尘降落,起到除尘的作用,同时利用风扇向第一通风管道和第二通风管道吹风,将水雾吹向截割头的一端,避免水雾飘到掘进机本体的一侧,减少水雾浪费,提高除尘效果,另外弧形水管和防护罩采用可拆卸式结构,容易安装,方便固定。
申请人:张永忠,郭晓鹏,秦利欧
地址:032699 山西省晋中市左权县山煤集团左权鑫顺煤业有限公司
国籍:CN
更多信息请下载全文后查看。
EBZ260W悬臂式掘进机技术方案1 概述EBZ260W是一种结构坚固可靠、布局紧凑、操作方便、自动化程度高的悬臂式掘进机。
机器是由电气和液压提供动力,采用模块化设计,便于拆装和运输。
适用巷道断面8~20㎡、最大可行走坡度±16°,可经济截割单向抗压强度≤80MPa的煤岩(局部硬度≤100MPa)。
2 使用条件(1)该机型适用于含有瓦斯、煤尘或其它爆炸性混合气体的环境;(2)海拔不超过2000m;(3)环境温度-20℃~+40℃,最大湿度95%;(4)无常期连续淋水的地方;(5)最大可行走的坡度不超过±16°;(6)适合经济截割岩石单向抗压强度≤80MPa(局部硬度≤100MPa)的煤及半煤岩巷道。
3 技术特性3.1 总体参数外形尺寸(m) 12.1×2.7(铲板2.9)×1.65 地隙(mm) 200卧底深度(mm) 310接地比压(Mpa) 0.192机重(t) 85总功率(Kw) 392截割岩石硬度≤80MPa(局部硬度≤100MPa)定位可掘巷道断面(㎡)20定位可掘最大高度(m) 3.928定位可掘最大宽度(m) 5.2适应巷道坡度(°)±16供电电压(V) 11403.2 截割机构电机功率(Kw) 260电机速度(r/min) 990截割速度(r/min) 32.85截齿数量(把) 513.3 装载机构装载形式星轮耙抓驱动形式高速马达+减速器铲板宽度(m) 2.9铲板卧底(mm) 250铲板抬高(mm) 350星轮转速(r/min) 303.4 刮板输送机构运输形式边双链刮板驱动形式低速大扭矩液压马达张紧形式液压张紧槽宽(mm) 580龙门高度(mm) 350链条规格(mm) 22×86-C链速(m/s) 0.83.5 行走机构行走形式履带(液压马达分别驱动)张紧形式液压张紧制动形式摩擦离合器行走速度(m/min)0~7接地长度(mm)3500履带板宽度(mm)650履带中心距(mm)19703.6 液压系统泵站功率(Kw)132转速(r/min)1470系统压力(Mpa)25油箱容积(L)1000两联泵排量(mL/r)190+190系统总流量(L/min)564行走油缸回路功率(Kw)80行走流量(L/min)260装载运输回路功率(Kw)80运输流量(L/min)85装载流量(L/min)1303.7 冷却喷雾系统灭尘方式内喷雾、外喷雾进水压力(Mpa)3~8进水流量(L/min)60过滤精度(μ)200内喷雾压力(Mpa) 3.0内喷雾流量(L/min)30外喷雾压力(Mpa)0.5外喷雾流量(L/min)30外喷雾压缩空气压力(Mpa)0.3~0.6(水压缩空气式气水喷雾)3.8 润滑润滑方式递进式集中润滑润滑脂型号极压锂基2号润滑点数40点操作方式液压手柄操作泵单元数量(个) 6系统压力(Mpa)20油箱容积(Kg) 43.9 电气系统隔爆形式隔爆兼本质安全型供电电压(V)1140V/660V控制回路(V)AC220、AC180、AC127、AC36、AC24 额定电流(A)280额定功率(Hz)50输出分路数 44 可掘断面参数掘进机在同一位置、双履带着地情况下(定位时)的最大可能截割范围是:最大截割宽度5000mm,最大地面以上高度3800mm,地面以下距离250mm。
目录一·概述§1-1·掘进机的用途§1-2·掘进机的发展历程§1-3·掘进机的技术发展趋势§1-4·悬臂式掘进机产品形式§1-5·悬臂式掘进机产品型号编制二·悬臂式掘进机的技术特点§2-1·悬臂式掘进机的基本组成§2-2·悬臂式掘进机技术特点§2-3·EBZ160(J1C)掘进机结构特征和工作原理三·悬臂式掘进机主要生产企业及其产品一·概述随着回采工作面机械化程度的提高,回采速度大大加快,巷道掘进和回采工作也必须加快。
靠钻爆法掘进巷道已经满足不了要求,采用掘进机法,使破落煤岩、装载运输、喷雾灭尘等工序同步进行,是提高掘进速度的有效措施。
按照工作机构切割工作面的方式,掘进机可分为部分断面巷道掘进机和全断面巷道掘进机两大类。
部分断面巷道掘进机主要用于煤和半煤岩巷道的掘进,其工作机构一般由一悬臂及安装在悬臂上的截割头所组成。
工作时,机构上下左右摆动,截割头旋转完成煤岩的破碎。
全断面巷道掘进机主要用于掘进岩石巷道,其工作机构沿整个工作面同时进行连续推进。
全断面巷道掘进机目前在煤矿上没有广泛应用。
本着以高新技术改造煤矿机械,率先促使所经营的产品升级换代至世界一流水平的三一重型装备有限公司在掘进机产品领域主要以悬臂式巷道掘进机作为开发的主导产品。
下面就请大家一起来了解我司的掘进机产品。
§1-1·掘进机的用途悬臂式巷道掘进机是一种综合掘进设备属于部分断面巷道掘进机,它集切割、行走、装运、喷雾灭尘于一体,包含多种机构,具有多重功能。
悬臂式掘进机作业线主要由主机与后配套设备组成。
主机把岩石切割破落下来,转运机构把破碎的岩渣转运至机器尾部卸下,由后配套转载机、运输机或梭车运走。
悬臂式掘进机的切割臂可以上下、左右自由摆动,能切割任意形状的巷道断面,切割出的表面精确、平整,便于支护。
外文翻译中文译文:悬臂纵轴式掘进机的总体设计总体设计是机械产品设计过程中的重要内容和主要环节,它是在方案设计之后紧接着进行的设计工作。
悬臂纵轴式掘进机(以下简称掘进机)的总体设计对整机性能的优劣起着决定性的作用,并决定了各总成、系统、各部件之间的协调性,统一性和匹配关系,从而获得总体的高端性能和较好的技术经济效益。
掘进机的总体设计,主要包括以下内容:1)据设计任务书选择机型及各部件结构型式2)定整机的主要技术性能参数,包括尺寸参数、重量参数、运动参数和技术经济指标3)按照总体设计的性能要求,确定整机系统的组成及它们之间的匹配性以及各个部件的主要技术参数4)进行必要的总体计算,并绘制传动、液压、电控系统图等。
1.选定该机型和各个部件及其结构型式、驱动方式、并进行总体的合理布置该项内容在确定前,首先应满足设计任务书的内容,特别是用户提出的主要要求经过调研,双方反复交换意见,达到既能满足用户(或上级)条件,又能较好的符合本企业产品发展的总体规划。
1)机型的选定根据掘进机的用途,是用于煤矿井下巷道的掘进还是用于其他行业的工程作业,掘进机的工作条件是用于截割煤巷还是半煤岩巷,煤岩的单向抗压强度(或普氏系数f值)及岩石的磨蚀系数。
同时应对照行标MT138~1995《悬臂式掘进机的型式与参数》,按其截割煤岩的最大单向抗压强度,选定机型的类别。
2)各部件结构型式、驱动方式的确定掘进机一般由截割机构、装运机构、行走机构、液压系统、电控系统及辅助装置(如除尘装置、安全装置、遥控监测装置)等组成。
a.截割机构。
截割机构的驱动方式由交流电动机驱动,在传动系统中一般设齿形联轴节,不设机械式过载保护装置,经两级行星减速器带动主轴前端的截割头。
部分断面掘进机的工作机构有截链式、圆盘铣削式和悬臂截割式等。
因悬臂截割式掘进机机体灵活、体积较小,可截出各种形状和断面的巷道,并能实现选择性截割,而且截割效果好,掘进速度较高;所以,现在主要采用悬臂截割式,并已成为当前掘进机工作机构的一种基本型式。
EBZ300掘进机设计计算书沈阳北方重型机械有限公司2010年8月20日EBZ300掘进机液压系统设计计算书EBZ3掘进机总体参数:整机外型尺寸:长×宽×高m整机使用重量kg使用重量G S0整机行驶速度(转场时)m/min理论生产率Q:m3/h一.行走计算1、EBZ掘进机所能具备最大牵引力计算:Fmax=G S gμg—重力加速度,g=9.8m/s2μ—附着系数,μ=0.65所以有:Fmax=2. 最大牵引力时单边履带所需驱动扭矩Mn:Mn= Fmax÷2×r p3. 计算最大牵引力时行走液压马达的参数:马达排量:q=(100 Mn)÷(1.59×ΔP×ηm×i)q—马达排量,ml/rΔP—进出口压差,ΔP =250barηm—马达效率,ηm=0.95i—减速机传动比,251最大牵引力时马达的排量:q=EBZ300掘进机行走系采用的液压马达及减速机参数如下:该减速机所能提供的驱动扭矩T=4. 整机转场工况下参数计算:此时行驶速度:v=驱动轮转速:n=马达设计流量:Q=所需泵排量:q=Q/所消耗功率:P=恒功率计算时速度应为驱动轮转速:n=马达设计流量:Q=2所需泵排量:q=r所消耗功率:P=如功率设定在60kW时全速行驶压力为129bar过小故应按压力16MPa计算P=Q×ΔP/η则功率设定为二、铲板及星轮的计算:1 .铲板及星轮基本参数:铲板宽度:3星轮外径:D=内径:d=星轮爪数:间角:α=星轮平均高度:h=液压系统额定压力:P=2 单爪每转输送物料面积:A=π[(D÷2)2-(d÷2)2]α÷360°3 星轮每转生产能力:单爪每转生产能力:Q1=(Ah)·k1·k2·k3其中:k1—装载面积系数,k1=0.8k2—装载系数,k2=0.75k3—时间系数,k3=0.7所以有:Q1’=两个5爪星轮每转生产能力:Q’=3 理论生产能力时星轮的转数:n=如果取3则理论生产率为6t/h4 星轮马达的计算:星轮工作一周所作的功:A=W·Lp+(Sp+0.2Lp)G·K其中:W—扒料阻力,N,W=bp·K B_=bp—单爪扒入料堆深度,m,bp=(D-d)/2K B_—单位插入阻力,N/m,岩石取K B_=,煤取K B_=Lp—单爪划过料堆的路程,m, Lp=G—单爪推移物料的质量,N,G=(Ah)gγγ—物料松散密度,t/m3,取γ=煤取γ=Sp—物料在铲台上的滑移路程,m,此处取Sp=Lp=K—堵塞系数,K=所以有:A=由此计算所需马达排量:q=所选取的星轮马达参数如下:马达流量:Q=2×n×q÷ηm=所需泵排量:所消耗功率:三、运输机计算1 运输机基本参数:溜槽宽度:B l=溜槽高度:h l=装满系数:ψ=0运输链规格:运输链速度:v=链轮齿数:Z=链轮节圆直径:d l=(5齿)液压系统额定压力:P=Q=60F·V·ψm3/min式中:F—输送机断面积m2F=0 Q=60F·V·ψm3/min=小时生产率60×6.75=h2 运输机运行阻力:单位长度内所运物料的重量:q y=(F·γ)×1000其中:F—溜槽断面面积,F=B l·h l=m2γ—运送物料的比重,γ=q y =22×86刮板链及刮板的总重量:G=838kg运输机的运行阻力:W=G(f1Cosβ+Sinβ)+q y L(W’Cosβ+Sinβ)其中:W’—物料在槽中移动阻力系数,W’=0.8f1—刮板链在槽中移动系数,f1=0β—运输机倾斜角平均值,β=°所以有:W=3 运输机马达参数:马达应具备的最小驱动力矩:Mnmin=W×D×g÷2实际马达驱动力矩取:Mn=2排量:q=q—马达排量,ml/rΔP—进出口压差,ΔP =ηm—马达效率,ηm=0ηv—马达容积效率,η所以有:q仅供个人用于学习、研究;不得用于商业用途。
目录目录 (1)第1章绪论 (3)1.1课题研究目的和意义 (3)1.2悬臂式掘进机国内外的发展现状及趋势 (4)1.2.1 国外发展现状及发展趋势 (4)1.2.2 国内发展现状及发展趋势 (5)1.2.3 发展前景及展望 (6)1.3主要研究内容 (7)第2章截割头的设计 (9)2.1截割头简介 (9)2.2截割头体形状确定 (9)2.3选择掘齿类型 (9)2.3.1 截齿受力对比 (10)2.3.2 齿尖受力对比 (11)2.3.3 安装方式对比 (11)2.4截齿在截割头上分布的方式 (12)2.5本章小结 (13)第3章减速机的结构设计 (14)3.1选择电动机类型及参数 (14)3.2减速机参数确定 (14)3.3分配传动比及选择材料 (15)3.4高速级齿轮参数计算 (16)3.4.1 确定齿数 (16)3.4.2 确定齿轮模数、中心距 (16)3.4.3 确定齿轮几何参数 (17)3.5低速级齿轮参数计算 (17)3.5.1 确定齿数 (17)3.5.2 确定齿轮模数、中心距 (17)3.5.3 确定齿轮几何参数 (18)3.6校核计算 (18)3.6.1 重合度计算 (18)3.6.2 齿根弯曲强度校核 (19)13.6.3 键强度、轴刚度校核 (21)3.7本章小结 (22)第4章伸缩臂的结构设计及分析 (23)4.1伸缩臂的基本结构 (23)4.2整机的受力分析 (24)4.2.1 轴向钻进工况下的受力分析 (25)4.2.2 向上摆动工况下的受力分析 (25)4.2.3 向下摆动工况下的受力分析 (26)4.2.4 左右摆动工况下的受力分析 (26)4.3内伸缩截割臂的受力分析 (27)4.3.1 向上摆动工况下的受力分析 (27)4.3.2 向下摆动工况下的受力分析 (29)4.3.3 左右摆动工况下的受力分析 (30)4.4内伸缩臂刚度校核 (31)4.5本章小结 (31)结论 (32)致谢 (33)参考文献 (34)2第1章绪论1.1课题研究目的和意义悬臂式部分断面掘进机(boom-typeroadheader)是煤矿井下巷道施工的主要掘进设备,根据截割头与截割臂的结构形式,悬臂式部分断面掘进机可分为两类:纵轴式和横轴式。
矿用矮机身悬臂式掘进机的设计
杨霞;胡媛媛;张迪;韩朝峰
【期刊名称】《煤矿机电》
【年(卷),期】2016(000)002
【摘要】目前煤矿薄煤层开采已逐渐增多,根据煤矿薄煤层开采的具体要求,针对机械部分设计了一种矮机身悬臂式掘进机以适应薄煤层巷道掘进的需要,掘进机包括截割、行走、装运、装载4个机构.
【总页数】3页(P73-74,77)
【作者】杨霞;胡媛媛;张迪;韩朝峰
【作者单位】运城职业技术学院矿山工程系,山西运城044000;运城职业技术学院矿山工程系,山西运城044000;运城职业技术学院矿山工程系,山西运城044000;运城职业技术学院矿山工程系,山西运城044000
【正文语种】中文
【中图分类】TD421.5
【相关文献】
1.悬臂式掘进机巷道位置及机身姿态检测方法 [J], 高奔
2.悬臂式掘进机机身及截割头位姿视觉测量系统研究 [J], 杨文娟;张旭辉;马宏伟;刘志明
3.矿用悬臂式掘进机PLC控制的截割控制系统设计研究 [J], 徐志军
4.煤矿用悬臂式掘进机行走机械设计分析 [J], 吴雪娜;王岩
5.煤矿用悬臂式掘进机行走机械设计 [J], 张乾昱;张虓
因版权原因,仅展示原文概要,查看原文内容请购买。
矿用矮机身悬臂式掘进机的设计
摘要:本文提出了一种新型的矿用矮机身悬臂式掘进机。
它通过采用轻量化设计、窄腔隙设计以及高刚性工作台等技术,具有良好的动态稳定性、维护方便性和高效使用率等优点。
为了加强其操作的可靠性和稳定性,本文还提出了一种基于分离式数据采集系统的可靠性保障措施,以实现数据的实时监测和分析,提高矮机身悬臂式掘进机的可靠性和综合性能。
关键词:矿用矮机身悬臂式掘进机;轻量化设计;窄腔隙设计;高刚性工作台;分离式数据采集系统
正文:矿用矮机身悬臂式掘进机是一种应用于采矿作业的机器人装备。
它能够实现精确的位置和水平控制,可以在有限的空间里完成挖掘作业。
然而,由于机身的矮小,在控制上存在一定的困难,如控制精度和高效性等。
为了解决这一问题,针对矿用矮机身悬臂式掘进机,本文提出了一种新型的设计方案,即采取轻量化设计、窄腔隙设计以及高刚性工作台等技术。
首先,采用轻量化设计,将机身和工作台结构设计为矮而强大的结构,从而改善机身的控制精度和操作速度。
其次,采取窄腔隙设计,使大部分的操作位置处于挤压状态,有效避免出现摩擦力,从而改善机器的控制精度和操作速度。
最后,采用高刚性工作台设计,抗振性能较好,从而改善机器的动态性能。
为了加强机器的可靠性,本文还提出了一种基于分离式数据采集系统的可靠性保障措施。
这种可靠性保障措施可以实现对机器的实时监控,从而检测出任何可能导致异常状况的情况,从而保护机器和环境安全。
本文提出的方案不仅可以使机器安全可靠,而且还可以提高矮机身悬臂式掘进机的综合性能。
经过以上一系列的设计和改进,将有助于提高矮机身悬臂式掘进机的可靠性和综合性能,从而解决采矿作业中精度控制、协调性和高效性等方面的问题,为采矿行业带来更多灵活性和便利性。
本文所提出的设计方案,可以使矿用矮机身悬臂式掘进机具备良好的动态稳定性、维护便利性和高效率。
首先,采取轻量化设计,可以改善机身的操作精度和操作速度,具有较高的操作效率。
其次,采用窄腔隙设计,可以有效避免摩擦力的产生,同时还可以改善操作精度和高效起动能力。
此外,还采用高刚性工作台设计,使机器具备良好的抗振性能,保证台面上工具和部件的稳定,并且可以改善机器的动态性能。
另外,为了保证矿用矮机身悬臂式掘进机的可靠性,本文还提出了一种基于分离式数据采集系统的可靠性保障措施,其目的是为了实现机器的实时监控,从而检测出任何可能导致异常状况的情况,从而有效地保护机器和环境安全。
总之,本文提出的矿用矮机身悬臂式掘进机的轻量化设计、窄腔隙设计以及基于分离式数据采集系统的可靠性保障措施等,可以使矿用矮机身悬臂式掘进机具有良好的操作精度和动态稳定性,同时还可以提高机器的维护便利性和高效利用率,为采矿行业带来更多的灵活性和便利性。
除了提高矿用矮机身悬臂式掘进机的综合性能外,本文还可以为采矿行业带来多方面的好处。
首先,采用窄腔隙设计,可以减少由于摩擦力造成的机器故障,从而有效地保障操作安全。
此外,采用轻量化设计,还可以提高作业速度和灵活性,具有高效率的特性,同时也可以显著降低运营成本。
此外,本文还提出了一种基于分离式数据采集系统的可靠性保障措施,可以实现对机器的实时监控,
从而解决精度控制、协调性和高效性等问题,使得采矿行业更加安全可靠。
总之,本文所提出的设计方案,可以实现矿用矮机身悬臂式掘进机的优化,具有良好的操作精度、动态稳定性、维护便利性和高效利用率,为采矿行业带来更多的便利性和灵活性,并有助于提高采矿行业的可靠性和生产效率。
此外,矿用矮机身悬臂式掘进机的轻量化设计不仅可以提高效率,同时还具有低耗能、环保性能等特点。
采用轻量化设计制造的矿用矮机身悬臂式掘进机,具有极低的能量消耗和较长的使用寿命等优点,可以在操作时间内节省大量能源,从而降低作业成本,延长挖掘机的使用寿命,减少采矿行业对新设备的投资,并有助于保护环境。
因此,本文所提出的矿用矮机身悬臂式掘进机的轻量化设计方案,可以带来多方面的好处,它既可以提升机器的综合能力,又可以节约能源,减少投资成本,提高矿用矮机身悬臂式掘进机的灵活性和可靠性,从而为采矿行业带来实实在在的利益。
此外,本文提出的矿用矮机身悬臂式掘进机的轻量化设计可以极大地改善工人在采矿作业中的安全性。
由于采用轻量化设计,机器不会出现太多的惯性影响,负载能力也提高了,这样就可以避免出现意外摔倒,大大降低作业中发生工伤的风险。
此外,本文还提出了基于分离式数据采集系统的可靠性保障措施,以实现对机器的实时监控,从而确保作业过程中的安全性。
通过监控系统对关键指标的实时监测,可以及时发现机器存在异常状态的可能性,从而及时采取行动,来保证机器的安全性,
从而确保作业过程中的安全性。
因此,本文提出的矿用矮机身悬臂式掘进机的轻量化设计和基于分离式数据采集系统的可靠性保障措施,都可以保证作业的安全性,为采矿行业带来更多的灵活性和便利性,为采矿行业带来更多的安全保障。
另外,本文所提出的矿用矮机身悬臂式掘进机的轻量化设计具有很好的维护性能。
g该设计可以节约大量的装配和维护时间,极大地提升了机器的可靠性和安全性,也有助于灵活地进行维护和保养。
此外,采用轻量化设计可以显著提高机车的可靠性,减少机车存在故障情况的可能性,从而为用户带来更好的服务质量,更长的使用寿命和更可靠的产品性能。
因此,本文提出的矿用矮机身悬臂式掘进机的轻量化设计可以提供更安全的作业环境,减少机器维护所需的时间,并有助于提高产品可靠性和服务质量。
因此,本文所提出的矿用矮机身悬臂式掘进机的轻量化设计方案,可以为采矿行业带来更多的便利性和可靠性,并有助于提高采矿行业的安全性和生产效率。
同时,本文提出的基于分离式数据采集系统的可靠性保障措施也为用户带来了可靠的安全保障。
通过将重要的安全信息和位置信息通过分离式数据采集系统无线传输,可以显著提高作业环境的安全性,从而大大减少事故发生的概率。
此外,通过监控系统监控机器的关键指标,也可以及时发现机器存在异常情况的可能性,从而及时采取行动,为用户提供更可靠的安全保障。
因此,本文提出的矿用矮机身悬臂式掘进机的轻量化设计和基
于分离式数据采集系统的可靠性保障措施都可以大大提升采矿行业的安全性,为用户带来更多便利性和可靠性,实现安全产量的最大化。
另外,本文提出的矿用矮机身悬臂式掘进机的轻量化设计还可以提高作业的灵活性和效率性。
该设计充分考虑了机器的空间、重量和性能限制,可以显著减少机器在特定空间内的活动时间,并能够在一定程度内提高作业效率,从而为用户带来更多的便利性和灵活性。
此外,通过轻量化设计,可以有效减少机器在作业过程中造成的环境影响,从而确保矿山运行环境的安全与稳定。
因此,本文提出的矿用矮机身悬臂式掘进机的轻量化设计和基于分离式数据采集系统的可靠性保障技术,都可以显著提高作业的安全性、可靠性和灵活性,确保矿山运行环境的安全与稳定,从而为采矿行业带来更多的利益。
此外,在实现采矿安全性、可靠性和灵活性的同时,也应该加强对技术设施的管理和检修。
通过定期对技术装备进行维护和检查,可以确保机器的正常运行,从而为用户带来更多的便捷性和安全性。
同时,在采矿操作中,也应当引入现代技术手段能够帮助提高操作效率,如采用大数据分析技术确保人员安全,即可以在有限时间内准确识别操作人员在现场的位置和行为,并能够根据实时数据及时发现存在的风险,从而及时采取行动,对未来的采矿行业发展具有重要意义。
总之,通过矿用矮机身悬臂式掘进机的轻量化设计和基于分离式数据采集系统的可靠性保障措施以及增加现代技术手段的支持,都可以极大提升采矿行业的安全性、可靠性和效率性,为用户带来更多的便利性和安全性,从而有效降低工作过程中发
生的危险,为采矿行业的发展及其它行业的技术发展提供良好的环境。