模糊控制大作业_南航_智能控制
- 格式:doc
- 大小:189.50 KB
- 文档页数:8
基于神经模糊控制的洗衣机设计20世纪90年代初期,日本松下电器公司推出了神经模糊控制全自动洗衣机。
这种洗衣机能够自动判断衣物的质地软硬程度、洗衣量、脏污程度和性质等,应用神经模糊控制技术,自动生成模糊控制规则和隶属度函数,预设洗衣水位、水流强度和洗涤时间,在整个洗衣过程中实时调整这些参数,以达到最佳的洗衣效果。
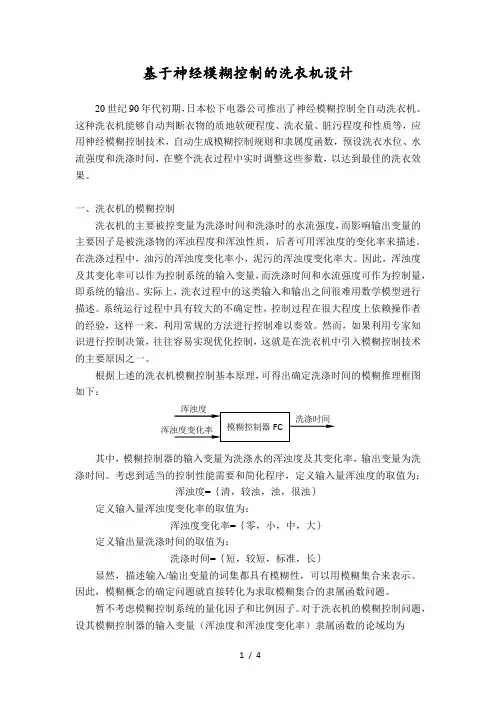
一、洗衣机的模糊控制洗衣机的主要被控变量为洗涤时间和洗涤时的水流强度,而影响输出变量的主要因子是被洗涤物的浑浊程度和浑浊性质,后者可用浑浊度的变化率来描述。
在洗涤过程中,油污的浑浊度变化率小,泥污的浑浊度变化率大。
因此,浑浊度及其变化率可以作为控制系统的输入变量,而洗涤时间和水流强度可作为控制量,即系统的输出。
实际上,洗衣过程中的这类输入和输出之间很难用数学模型进行描述。
系统运行过程中具有较大的不确定性,控制过程在很大程度上依赖操作者的经验,这样一来,利用常规的方法进行控制难以奏效。
然而,如果利用专家知识进行控制决策,往往容易实现优化控制,这就是在洗衣机中引入模糊控制技术的主要原因之一。
根据上述的洗衣机模糊控制基本原理,可得出确定洗涤时间的模糊推理框图如下:其中,模糊控制器的输入变量为洗涤水的浑浊度及其变化率,输出变量为洗涤时间。
考虑到适当的控制性能需要和简化程序,定义输入量浑浊度的取值为:浑浊度={清,较浊,浊,很浊}定义输入量浑浊度变化率的取值为:浑浊度变化率={零,小,中,大}定义输出量洗涤时间的取值为:洗涤时间={短,较短,标准,长}显然,描述输入/输出变量的词集都具有模糊性,可以用模糊集合来表示。
因此,模糊概念的确定问题就直接转化为求取模糊集合的隶属函数问题。
暂不考虑模糊控制系统的量化因子和比例因子。
对于洗衣机的模糊控制问题,设其模糊控制器的输入变量(浑浊度和浑浊度变化率)隶属函数的论域均为输入变量论域={0,1,2,3,4,5,6}模糊控制器的输出变量(洗涤时间)隶属度函数的论域为输出变量论域={0,1,2,3,4,5,6,7}每个模糊变量属于上述论域的模糊子集如表1所示。
智能控制大作业报告模糊部分姓名:学号:专业:2011年06月03日题目:已知()()0.5250.528sG e s s s -=+++,分别设计PID 控制与模糊控制,使系统达到较好性能,并比较两种方法的结果。
PID/FCG(s)yr_e具体要求:1、采用Fuzzy 工具箱实现模糊控制器。
2、分析量化因子和比例因子对模糊控制器控制性能的影响。
3、分析系统阶数发生变化时模糊控制和PID 控制效果的变化。
4、分析系统在模糊控制和PID 控制作用下的抗干扰能力(加噪声干扰)、抗非线性能力(加死区和饱和特性)以及抗时滞的能力(对时滞大小加以改变)。
一 原系统仿真分析原系统是一个带有时滞环节的三阶系统,系统的三个极点均在s 域左半平面,系统是稳定的。
利用Matlab/Simulink 工具箱搭建系统框图,对原系统进行阶跃响应分析。
原系统框图如图1所示:图1 原系统框图设定仿真时间为10秒,其它为默认设置,运行程序,可以得到如图2所示仿真结果。
0123456789100.10.20.30.40.50.60.7t/s原系统阶跃响应图2 原系统阶跃响应曲线由图可以看出,原系统是稳定的,但是稳态误差比较大。
二 PID控制器设计根据上述仿真分析,可以知道系统性能比较差,因此设计初步设计PID控制器以在一定程度上改善系统性能。
PID参数的整定采用尝试的方法,遵循先比例后积分再微分的整定顺序,达到保持两个周期、前后超调比约为1:4的理想响应波形。
带PID控制器的系统框图如图3所示:图3 PID控制系统框图其中PID控制器参数如图4所示:图4 PID参数设置设定仿真时间为20s ,运行程序,可以得到如图5所示仿真结果:246810121416182000.20.40.60.811.21.4t/sS t e pPID 控制响应图5 PID 控制阶跃响应曲线由图可以看出,增加PID 控制的系统能够完全消除稳定误差,且具有较小的超调和较短的调节时间,极大程度地改善了系统的性能。
南京航空航天大学研究生实验报告实验名称:遗传算法PID控制器设计姓名:学号:专业:201 年月日一、题目要求考虑如下某水下航行器的水下直航运动非线性模型:()||a m m v k v v u y v++==其中v R ∈为水下航行器的前进速度, u R ∈为水下航行器的推进器推力,y R ∈为水下航行器的输出,航行器本体质量、附加质量以及非线性运动阻尼系数分别为100,15,10a m m k ===。
作业具体要求:1、设计基于遗传算法的模糊控制器、神经网络控制器或PID 控制器(任选一)。
2、分析采用遗传算法前后的控制效果。
3、分析初始条件对寻优及对控制效果的影响。
4、分析系统在遗传算法作用下的抗干扰能力(加噪声干扰、加参数不确定)、抗非线性能力(加死区和饱和特性)、抗时滞的能力。
二、基于遗传算法的PID 控制器设计与仿真1.遗传算法的水下航行器模型采用遗传算法对PID 控制器参数进行优化,其中水下航行器模型采用如下函数实现,通过调用ode45()可以求解此非线性模型。
%---------------------------------------------------------------- function dy = UnderwaterVehicle(t, y, u)m = 100 ; ma = 15 ; k = 10 ;dy = (u - k * abs(y) * y )/(m + ma) ;%---------------------------------------------------------------- 2.最优指标的选取为获得满意的过渡过程动态特性,采用误差绝对值积分性能指标作为参数选择的最小目标函数。
为防止控制能量过大,在目标函数中加入控制输入的平方项。
选用下式作为参数选取的最优指标:()21230()()Nu t J w e t w u t dt w t ==++∑其中()e t 为系统误差,()u t 为控制器输出,u t 为上升时间,1w 、2w 和3w 为权值。
智能控制大作业姓名:何成东学号:S0703234专业:导航、制导与控制模糊控制器部分大作业已知()()0.525123s G e s s s -=+++,分别设计PID 控制与模糊控制,使系统达到较好性能,并比较两种方法的结果。
具体要求:1、分别采用fuzzy 工具箱和编程实现模糊控制器。
2、分析量化因子和比例因子对模糊控制器控制性能的影响。
3、分析系统在模糊控制和PID 控制作用下的抗干扰能力(加噪声干扰)、抗非线性能力(加死区和饱和特性)以及抗时滞的能力(对时滞大小加以改变)。
4、讨论系统在模糊控制和PID 控制作用下的时间参数和结构变化下的抗干扰能力。
模糊控制部分大作业旨在利用模糊控制器和PID 控制器实现对已知系统的控制,分别得到较好的控制效果。
然后改变系统的参数、结构或者加入非线性环节,以验证模糊控制器的鲁棒性能。
以下是作业过程:1、PID 控制考虑到系统中存在纯延迟环节,使得系统的稳定性大大降低。
如果系统的反馈信号没有延迟,系统的响应特性将会得到很好的改善。
因此,对于存在纯滞后环节的系统,特别是大延迟过程,一般采用Smith 预估控制,即将纯滞后补偿模型与PID 控制器并接。
本题中,延迟环节的时间常数不是很大,仅为0.2,因此基本上不会影响系统的稳定,采用常规PID 控制也基本可以达到很好的控制效果。
常规PID 控制框图如图1-1(相应文件:PID.mdl )图1-1 常规PID 控制框图PID 参数选取:38.0=p K ,285.0=i K ,1.0=d K 常规PID 控制的单位阶跃响应曲线:图1-2 常规PID 控制响应曲线2.模糊控制模糊控制规则(相应文件:zdh.fis )表1.1 模糊控制规则各变量论域输入变量:E :[-6 6];EC :[-6 6]; 输出变量:U :[0 7] 语言变量E : NB 、NM 、NS 、NZ 、PZ 、PS 、PM 、PB (8个) EC :NB 、NM 、NS 、ZE 、PS 、PM 、PB (7个) U : NB 、NM 、NS 、ZE 、PS 、PM 、PB (7个) 各变量隶属度函数:三角形函数(trimf )模糊推理:Mamdani 推理法去模糊化:中位数法(bisector )模糊控制框图(相应文件:mohu.mdl )图1-3 模糊控制框图选取量化因子:7.1=e K ,5.0=ec K 选取比例因子:171.0=u K 模糊控制响应曲线图1.4 模糊控制响应曲线在模糊控制器的设计过程中,选择合适的论域和量化因子、比例因子是至关重要的。
南京工程学院自动化学院《智能控制技术》大作业课程名称:智能控制技术院(系、部、中心):康尼学院专业:自动化班级: K自动化121 姓名:刘爽学号: 240120902课程论文成绩评定:指导教师签字:2015 年 6 月 24 日摘要模糊控制是以模糊集合论作为它的数学基础,用语言规则表示方法和先进的计算机技术,由模糊推理进行决策的一种高级控制策。
模糊控制作为以模糊集合论、模糊语言变量及模糊逻辑推理为基础的一种计算机数字控制,它已成为目前实现智能控制的一种重要而又有效的形式尤其是模糊控制和神经网络、遗传算法及混沌理论等新学科的融合,正在显示出其巨大的应用潜力。
实质上模糊控制是一种非线性控制,从属于智能控制的范畴。
模糊控制的一大特点是既具有系统化的理论,又有着大量实际应用背景.本文简要回顾了模糊控制理论的发展,详细介绍了模糊控制理论的原理和模糊控制器的设计步骤,分析了模糊控制理论的优缺点以及模糊控制需要完善或继续研究的内容,根据各种模糊控制器的不同特点,对模糊控制的应用进行了分类,并分析了各类模糊控制器的应用效能.最后,展望了模糊控制的发展趋势与动态。
关键词:模糊控制;模糊控制理论;模糊控制系统;模糊控制理论的发展第一节引言1。
1 模糊控制系统简介模糊控制系统是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术.自从美国加利福尼亚大学控制论专家L.A.Zadeh教授在1965年提出的《Fuzzy Set》开创了模糊数学的历史,吸引了众多的学者对其进行研究,使其理论和方法日益完善,并且广泛的应用于自然科学和社会科学的各个领域,尤其是第五代计算机的研制和知识工程开发等领域占有特殊重要的地位.把模糊逻辑应用于控制领域则始于1973年.1974年英国的E.H.Mamdani成功地将模糊控制应用于锅炉和蒸汽机的控制.此后20年来,模糊控制不断发展并在许多领域中得到成功应用。
由于模糊逻辑本身提供了由专家构造语言信息并将其转化为控制策略的一种体系理论方法,因而能够解决许多复杂而无法建立精确数学模型系统的控制问题,所以它是处理推理系统和控制系统中不精确和不确定性的一种有效方法。
神经网络控制大作业-南航-智能控制-标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII南京航空航天大学研究生实验报告实验名称:神经网络控制器设计姓名:学号:专业:201 年月日一、题目要求考虑如下某水下航行器的水下直航运动非线性模型:()||a m m v k v v u y v++==其中v R ∈为水下航行器的前进速度, u R ∈为水下航行器的推进器推力,y R ∈为水下航行器的输出,航行器本体质量、附加质量以及非线性运动阻尼系数分别为100,15,10a m m k ===。
作业具体要求:1、设计神经网络控制器,对期望角度进行跟踪。
2、分析神经网络层数和神经元个数对控制性能的影响。
3、分析系统在神经网络控制和PID 控制作用下的抗干扰能力(加噪声干扰、加参数不确定)、抗非线性能力(加死区和饱和特性)、抗时滞的能力(对时滞大小加以改变)。
二、神经网络控制器的设计1.构建系统的PID 控制模型在Simulink 环境下搭建水下航行器的PID 仿真模型,如下图1所示:图1 水下航行器的PID 控制系统其中,PID控制器的参数设置为:K p=800,K i=100,K d=10。
需要注意的一点是,经过signal to workspace模块提取出的数据的Save format为Array格式。
2.BP神经网络控制器的训练首先将提取出的训练数据变为标准的训练数据形式,标准的训练数据分为输入和目标输出两部分。
经过signal to workspace模块提取出的数据为一个训练数据个数乘以输入(或输出)个数的矩阵,因此分别将x、u转置后就得到标准训练数据x’,u’。
然后,新建m文件,编写神经网络控制器设计程序:%----------------------------------------------------------------p=x'; %inputt=u'; %inputnet=newff(p,t,3,{'tansig','purelin'},'trainlm');net.trainparam.epochs=2500;net.trainparam.goal=0.00001;net=train(net,x',u'); %train networkgensim(net,-1); %generate simulink block%----------------------------------------------------------------上述m文件建立了如下图所示的神经网络,包含输入层、1个隐含层和输出层,各层神经元节点分别为 1、 3 和1。
智能控制与应用实验报告模糊控制器设计一、 实验内容考虑一个单连杆机器人控制系统,其可以描述为:0.5sin()Mqmgl q y qτ+==(1)其中 20.5M kgm =为杆的转动惯量,1m kg =为杆的质量,1l m =为杆长,29.8/g m s =,q 为杆的角位置,q为杆的角速度,q 为杆的角加速度,τ为系统的控制输入。
实验具体要求:1. 分别采用fuzzy 工具箱设计模糊控制器跟踪期望的角位置信号。
2. 分析量化因子和比例因子对模糊控制器控制性能的影响。
3. 分析系统在模糊控制和PID 控制作用下的抗干扰能力(加噪声干扰)和抗非线性能力(加死区和饱和特性)。
4. 为系统设计模糊PID 控制器。
二、 对象模型建立根据公式(1),令状态量121=,x q x x =得到系统状态方程为:121210.5**sin()x x mgl x x My x τ=-==(2)由此建立单连杆机器人的模型如图1所示。
图1 单连杆机器人模型三、模糊控制算法实现及仿真本次实验设计一个二维模糊控制器,令误差*=-,误差变化E q q= ,模糊控制器输出语言变量为U。
EC E1)三个变量E、EC和U的模糊词集为:﹛NB,NM,NS,ZO,PS,PM,PB﹜模糊论域为:E和EC:{-6,-5,-4,-3,-2,-1,0, 1, 2, 3, 4, 5, 6}U:{-7,-6,-5,-4,-3,-2,-1, 0, 1, 2, 3, 4, 5, 6, 7}2)模糊控制规则为:表1 模糊控制规则表3)确定E,EC和U的控制表4)建立模糊控制表5)建立SIMULINK模型在Matlab/Simulink中建立单连杆机器人模糊控制系统模型如图2所示:图2 单连杆机器人控制系统模型6) 仿真结果给定正弦参考信号,取量化因子5,1Ke Kec ==,比例因子50Ku =,得到系统角度跟踪为图3。
51015-1-0.8-0.6-0.4-0.200.20.40.60.81t/sa n g l e /r a d图3 正弦角度跟踪由图3可知,该模糊控制器能使得单连杆机器人控制系统实现很好的角度跟踪。
本文选用的被控对象的传递函数为0.512()(1)se G s s -=+1、 常规PD 控制器的设计为满足参考性能指标:(1) r(t)=1(t) 时稳态误差为0 ; (2) 超调量不超过5 % ; (3) 调节时间不超过2秒。
可将PD 控制器设计为 2.05p K =, 1.1d K =,同时为了消除稳态误差,可加入积分环节,用simulink 搭建的仿真系统如图1所示。
图1 simulink 仿真框图当输入为单位阶跃信号时,系统输出曲线如图2所示,此时系统的超调量为2.64%,调节时间为1.596s ,由于积分环节的加入,此时系统稳态误差为0。
图2 阶跃响应曲线2、 Mamdany 型模糊控制器的设计语言变量E 的论域为{-1,-0.5,0,0.5,1},语言变量EC 的论域为{-1,-0.5,0,0.5,1}。
将PD 控制器输入输出数据作为专家操作试验数据,得到控制规则为()()()p d u t K e t K e t =+将E,EC代人,可得=+u 2.05e 1.1ec各对应e、ec下的u值,此模糊模型由表1给出。
受位数限制,将上表中数据就近取近似,如表2所示。
由表2可得到语言变量U的论域为{-3,-2.5,-2,-1.5,-1,-0.5,0,0.5,1,1.5,2,2.5,3},根据上述规则,可以得到输入输出语言变量的语言值分布图,如图3,以及模糊控制规则表面图,如图4。
(a)语言值E的语言值分布图(b)语言值EC的语言值分布图(c)语言值U的语言值分布图图3 语言变量E、EC和U的语言值分布图图4 模糊控制规则表面图搭建simulink仿真模块,并装载此文件,如图5,可得到阶跃输入下的系统输出曲线如图6。
根据此曲线,可以看出此时系统的超调量为4.5%,调节时间为2.05585s,稳态误差为0。
图5 simulink 仿真框图图6 阶跃响应曲线3、 T-S 型模糊控制器的设计考虑到T-S 模型中需要设置调节的参数较多,调节难度对个人来说较大,此处减少输入语言变量取值个数,语言变量E 的论域取为{-1, 0, 1},语言变量EC 的论域取为{-1, ,0 ,1}。
模糊控制器大作业一、题目要求考虑如下某水下航行器的水下直航运动非线性模型:()||a m m v k v v u y v++==其中v R ∈为水下航行器的前进速度, u R ∈为水下航行器的推进器推力,y R ∈为水下航行器的输出,航行器本体质量、附加质量以及非线性运动阻尼系数分别为100,15,10a m m k ===。
作业具体要求:1、分别采用fuzzy 工具箱设计模糊控制器使得系统稳定或跟踪期望指令信号。
2、分析量化因子和比例因子对模糊控制器控制性能的影响。
3、比较分析系统在模糊控制和PID 控制作用下的抗干扰能力(加噪声干扰)和抗非线性能力(加死区和饱和特性)。
二、构建模糊控制Simulink 仿真模型1.模糊控制器的设计(1)观测量:输入量、输出量(控制量)由题目要求分析可知,在这个水下航行器的水下直航运动非线性模型中,输入量是水下航行器的推进器推力u R ∈,输出是水下航行器的前进速度v R ∈。
(2)根据系统实际情况,选择误差e ,误差变化ec 和控制量u 的论域e range : [-6 6] ec range: [-6 6] u range: [-6 6] (3)e ,de 和u 语言变量的选取e 7个:NB,NM,NS,ZO,PS,PM,PB ec 7个:NB,NM,NS,ZO,PS,PM,PB u 7个:NB,NM,NS,ZO,PS,PM,PB(4)模糊控制规则确定ueNB NM NS ZO PS PM PBec NB PB PB PM PM PS ZO ZO NM PB PB PM PM PS ZO ZO NS PB PB PM PS ZO NM NM ZO PB PB PM ZO NM NB NB PS PM PM ZO NS NM NB NB PM ZO ZO NS NM NM NB NB PB ZO ZO NS NM NM NB NB表1 模糊规则表图1 模糊控制规则的添加在模糊控制器的设置中,分别对控制器中的E、EC、U进行设置,按照(2)中的选择确定论域范围,均为[-6 6],选择的隶属函数为高斯函数分布。
Harbin Institute of Technology课程大作业课程名称:机电系统智能控制技术及其MATLAB实现(双语)院系:机电学院班级:姓名:学号:日期:哈尔滨工业大学Problem: Consider a fuzzy controller composed of the following rules:If E is A1 and DE is B1, then U is C1,If E is A2 and DE is B2, then U is C2,Where the membership functions are triangular shaped and defined by A1 (2,5,8), A2 (3,6,9),B1 (5,8,11), B2 (4,7,10), C1 (1,4,7), C2 (3,6,9). Suppose that sensor readings provide exact numerical measurements e=4 and de=8. Assume the sup-min rule of inference and interpret the connective and as the min operator and the rule relations as conjunctions via the min t-norm. Find the fuzzy controls suggested by each rule. Determine the control signal that should be applied to a process considering both the mean-of maxima and center-of-gravity. Sketch the successive steps you performed to get your results.Solutions:To meet with the teacher’s requests, here we used two methods to solve this problem, and tried to display the process of how to finish a fuzzy inference. The two methods are given as follows.(I)Theoretical calculation:Although the fuzzy set presented above is continuous, we can use a discrete fuzzy set to describe it, so long as we choose enough points in the universe of discourse to describe it. In fact, in many practical engineering problems, we usually use discrete methods to describe continuous problems, and when the isolation quantities are plenty enough, the results are always acceptable.In this problem, we can see that there are two input variables: E and DE, with a single output variable U. Here we can allocate a certain universe of discourse to each variable, E[2,10], DE[4,12], U[0 12]. So we can take the integers in each universe of discourse to form the fuzzy set, and the result is given as follows:A1=0/2+0.33/3+0.67/4+1/5+0.67/6+0.33/7+0/8+0/9+0/10;A2=0/2+0/3+0.33/4+0.67/5+1/6+0.67/7+0.33/8+0/9+0/10;B1=0/4+0/5+0.33/6+0.67/7+1/8+0.67/9+0.33/10+0/11+0/12;B2=0/4+0.33/5+0.67/6+1/7+0.67/8+0.33/9+0/10+0/11+0/12;C1=0/0+0/1+0.33/2+0.67/3+1/4+0.67/5+0.33/6+0/7+0/8+0/9+0/10+0/11+0/12;C2=0/0+0/1+0/2+0/3+0.33/4+0.67/5+1/6+0.67/7+0.33/8+0/9+0/10+0/11+0/12;Since we have built the discrete fuzzy sets, we can use the fuzzy vectors to describe the fuzzy sets. And the fuzzy relationships of the rules can be expressed as: Rii=(Ai and Bi)→Ci (i=1,2).And here we use cap to solve (Ai and Bi), so we can first calculate the relationship matrixes of input variables Rii:Here we use matlab to help me with the calculation and the results are shoId as follows:The first rule of input variables A1 and B1:The second rule of input variables A2 and B2:Next, we need to build the relationships between input variables and output variables, and here we use the Mamdani method to build the relationship. To use the Mamdani method, we first need to reshape the matrixes R11 and R22 into vectors Rv11 and Rv22, and then we can use the rule of Mamdani method to get the fuzzy relationship matrixes R1、R2. And the calculation rule is given as follows:Ri =Rvii ∧Ci⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=∧= •00 0 0 0 0 0 0 00 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 00 0 0.3300 0.3300 0.3300 0.3300 0.3300 0 00 0 0.3300 0.6700 0.6700 0.6700 0.3300 0 00 0 0.3300 0.6700 1.0000 0.6700 0.3300 0 00 0 0.3300 0.6700 0.6700 0.6700 0.3300 0 00 0 0.3300 0.3300 0.3300 0.3300 0.3300 0 00 0 0 0 0 0 0 0 011R11B A T ⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=∧=0 •00 0 0 0 0 0 00 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 00 0 0 0.3300 0.3300 0.3300 0.3300 0.3300 00 0 0 0.3300 0.6700 0.6700 0.6700 0.3300 00 0 0 0.3300 0.6700 1.0000 0.6700 0.3300 00 0 0 0.3300 0.6700 0.6700 0.6700 0.3300 00 0 0 0.3300 0.3300 0.3300 0.3300 0.3300 00 0 0 0 0 0 0 0 022R22B A TAfter getting the two matrixes R1 and R2, we need to combine the two matrixes into a final relationship matrixes R by using the function:R=R1∪R2Here we also use the matlab to help us with our calculations and the results can be gotten by running the matlab code provided in the attachment1.Since we need to calculate the result with the input variable E=4 and DE=8, so we first can write the input fuzzy sets E and DE as follows:E=0/2+0/3+1/4+0/5+0/6+0/7+0/8+0/9+0/10;DE=0/4+0/5+0/6+0/7+1/8+0/9+0/10+0/11+0/12;Then we can get the input fuzzy vectors A3 and B3 as follows:A3=[0 0 1 0 0 0 0 0 0];B3=[0 0 0 0 1 0 0 0 0];And use the same methods as mentioned above, we can easily to get the relationship matrixes of input variables R33.Then we can use the function C3=R33•R to calculate the output vectors and the result obtained from matlab is showed as follows:C3=[0 0 0.33 0.67 0.67 0.67 0.33 0.33 0.33 0 0 0 0]And the fuzzy set can write as:C3={0/0+0/1+0.33/2+0.67/3+0.67/4+0.67/5+0.33/6+0.33/7+0.33/8+0/9+0/10+0/11+0/12};According to the requests of the problem, here we use two methods ‘mom’ and‘centroid’ to realize the defuzzification.‘MOM’:From the output fuzzy sets we can see there are three maximum values 3、4、5, the average value is 4. So 4 is the real output value with the input E=4 and DE=8.‘CENTROID’:U=(0.33×2+0.67×3+0.67×4+0.67×5+0.33×6+0.33×7+0.33×8)/(0.33+0.67+0.67+0.67+0.33+0.33+0.33)=4.6937So the final output value is 4.6973 by using the ‘centroid’ method.(II)Matlab Simulink:In this portion of the article, we used the fuzzy toolbox of matlab to help me to solve this problem. And the process of using matlab is showed as follows:(1)Open the matlab fuzzy toolbox by typing the code ‘fuzzy’ in matlab’s command window.(2)Choose the parameters for the fuzzy inference system as showed in the figure as follows:(3)Set the input and output variables and define the universe for each variable.Input variable A Input variable BOutput variable C The rules of the FIS(4)The results of the FIS with the input E=4 and DE=8.The ’Centroid’ method result u=4.7 The ’Mom’ method result u=3.96(III) GainsFrom the results of the two methods we can see that the results gained with different methods are almost the same. So the method of theoretic calculation above is proved to be correct.By practicing this work, it makes me to get a clear understanding of the fuzzy inference system. And we also gained the ability to complete a process of fuzzy inference by myself. By solving the problems that puzzled me during the work, we gained the ability to solve problems by myself which really matters in the further future of my study and also obtained the self-confidence.Attachment1: calculation code of matlabfunction z=cap(x,y)for i=1:size(x,1)for j=1:size(y,2)z(i,j)=max(min(x(i,:),y(:,j)'));endendz;clearclc%define input and output vectorsA1=[0 0.33 0.67 1 0.67 0.33 0 0 0];A2=[0 0 0.33 0.67 1 0.67 0.33 0 0];B1=[0 0 0.33 0.67 1 0.67 0.33 0 0];B2=[0 0.33 0.67 1 0.67 0.33 0 0 0];C1=[0 0 0.33 0.67 1 0.67 0.33 0 0 0 0 0 0];C2=[0 0 0 0 0.33 0.67 1 0.67 0.33 0 0 0 0];%feedback input vectors A3=4;B3=8A3=[0 0 1 0 0 0 0 0 0];B3=[0 0 0 0 1 0 0 0 0];%calcualte (Ai and Bi)R11=cap(A1',B1);R22=cap(A2',B2);%reshape the maxtrixes into vectorsRv11=reshape(R11',1,size(R11,1)*size(R11,2));Rv22=reshape(R22',1,size(R22,1)*size(R22,2));%use Mamdani method to build the relationship of each ruleR1=cap(Rv11',C1);R2=cap(Rv22',C2);%calculate the final fuzzy relationship matrixR=max(R1,R2);%calculate the output vector associated with the input variables R33=cap(A3',B3);R33=reshape(R33',1,size(R33,1)*size(R33,2));C3=cap(R33,R)%'mom' valueC=0:(size(C1,2)-1);num=find(C3==max(C3));total=0;for i=1:size(num,2)total=total+C(num(i));endmom=total/size(num,2)%'centroid' valuecentroid=sum(C3.*C)/sum(C3)。
模糊控制器大作业
一、题目要求
考虑如下某水下航行器的水下直航运动非线性模型:
()||a m m v k v v u y v
++==
其中v R ∈为水下航行器的前进速度, u R ∈为水下航行器的推进器推力,y R ∈为水下航行器的输出,航行器本体质量、附加质量以及非线性运动阻尼系数分别为
100,15,10a m m k ===。
作业具体要求:
1、分别采用fuzzy 工具箱设计模糊控制器使得系统稳定或跟踪期望指令信号。
2、分析量化因子和比例因子对模糊控制器控制性能的影响。
3、比较分析系统在模糊控制和PID 控制作用下的抗干扰能力(加噪声干扰)和抗非线性能力(加死区和饱和特性)。
二、构建模糊控制Simulink 仿真模型
1.模糊控制器的设计
(1)观测量:输入量、输出量(控制量)
由题目要求分析可知,在这个水下航行器的水下直航运动非线性模型中,输入量是水下航行器的推进器推力u R ∈,输出是水下航行器的前进速度v R ∈。
(2)根据系统实际情况,选择误差e ,误差变化ec 和控制量u 的论域
e range : [-6 6] ec range: [-6 6] u range: [-6 6]
(3)e ,de 和u 语言变量的选取
e 7个:NB,NM,NS,ZO,PS,PM,PB ec 7个:NB,NM,NS,ZO,PS,PM,PB u 7个:NB,NM,NS,ZO,PS,PM,PB
(4)模糊控制规则确定
表1 模糊规则表
图1 模糊控制规则的添加
在模糊控制器的设置中,分别对控制器中的E、EC、U进行设置,按照(2)中的选择确定论域范围,均为[-6 6],选择的隶属函数为高斯函数分布。
2.模糊控制的仿真
按照模糊控制器的结构在Simulink 环境下搭建仿真模型,如下图所示:
图2 水下航行器模糊控制器仿真
其中,system 子系统模型如下:
图3 水下航行器非线性模型仿真
由仿真图可以清晰看到量化因子K e 、K ec 和比例因子K u 。
通过readfis 函数将模糊规则控制库‘fuzzy_controller.fis ’导入到fuzzy-logic controller 中。
当比例因子和量化因子设置为K e =4,K ec =2,K u =100,输出的阶跃响应如下:
1
2
3
4
5
6
7
8
00.20.40.60.81time/s
s t e p r e s p o n s
e
图4 参数设置为K e =4,K ec =2,K u =100的阶跃响应
三、仿真系统性能分析
1.量化因子对模糊控制器性能的影响
在模糊控制器中,两个输入(即误差和误差的倒数)前要加入量化因子,将连续论域转化为离散论域,则量化因子e e x n K =
;对误差倒数,量化因子为ec
ec x m K =;模糊输出的控制量u 的比例因子为l
y K u u =
减小量化因子,设置K e =2,其他为K ec =2,K u =100保持不变。
得到的系统阶跃响应输出如下:
1
2
3
4
5
6
7
8
00.20.40.60.81time/s
s t e p r e s p o n s
e
图5 参数设置为K e =2,K ec =2,K u =100的阶跃响应
增大量化因子,设置K e =6,其他为K ec =2,K u =100保持不变。
得到的系统阶跃响应输出如下:
1
2
3
4
5
6
7
8
00.20.40.60.81time/s
s t e p r e s p o n s
e
图6 参数设置为K e =6,K ec =2,K u =100的阶跃响应
由图4、图5和图6的对比分析可以看出,量化因子K e 的大小对控制系统的动态性能影响很大。
K e 增大时,系统阶跃响应加快,系统静差也随之减小。
2.比例因子对模糊控制器性能的影响
减小比例因子,设置K u =80,其他K e =2,K ec =2保持不变,得到的系统阶跃响应输出如下:
1
2
3
4
5
6
7
8
00.20.40.60.81time/s
s t e p r e s p o n s
e
图7 参数设置为K e =2,K ec =2,K u =80的阶跃响应
增大比例因子,设置K u =500,其他K e =2,K ec =2保持不变,得到的系统阶跃响应输出如下:
1
2
3
4
5
6
7
8
00.20.40.60.81time/s
s t e p r e s p o n s
e
图8 参数设置为K e =2,K ec =2,K u =500的阶跃响应
由图4、图7和图8的对比分析可以看出,比例因子K u 的大小对控制系统的动态性能影响很大。
K u 增大时,系统阶跃响应加快,系统静差也随之减小。
四、模糊控制器和PID 控制器抗干扰性能比较
1.PID 控制系统仿真与抗干扰分析
(1)水下航行器PID 控制仿真
图9 水下航行器PID 控制仿真图
5
10
15
00.20.40.60.81time/s
s t e p r e s p o n s
e
图10 水下航行器PID 控制阶跃响应
其中,PID 控制器的参数设置为K p =600、K i =500、K d =10。
(2)加入噪声干扰的水下航行器PID 控制仿真
加入噪声干扰后,PID 控制仿真图如下:
图11 加入噪声干扰后的水下航行器PID 控制仿真图
阶跃响应如下图所示:
5
10
15
00.20.40.60.81time/s
s t e p r e s p o n s
e
图12 加入噪声干扰后的水下航行器PID 控制阶跃响应
2.模糊控制系统仿真与抗干扰分析
加入噪声干扰后的模糊控制仿真图如下:
图13 加入噪声干扰后的水下航行器模糊控制仿真图
阶跃响应如下图所示:
1
2
3
4
5
6
7
8
00.20.40.60.81time/s
s t e p r e s p o n s
e
图14 加入噪声干扰后的水下航行器模糊控制阶跃响应
分别对模糊控制系统和PID 控制系统加入干扰信号白噪声,如图11以及图13
所示,由响应曲线图12,图14可得,PID 控制加入噪声干扰使系统出现比较剧烈的震荡。
对加入模糊控制器的系统加入噪声干扰,系统的抗干扰能力比PID 控制器要略好,震荡的幅度比较小。
3. PID 控制器和模糊控制器抗非线性能力对比
加入死区和饱和特性后模糊控制与PID 控制均出现负误差,与PID 控制相比,模糊控制的响应时间变化不大,但是稳态误差变化较大,所以,综合来看,PID 控制的抗非线性干扰能力强。
图15 模糊控制系统仿真图(加死区和饱和特性)
图16 PID 控制系统仿真图(加死区和饱和特性)
1
2
3
4
5
6
7
8
00.20.40.60.81time/s
s t e p r e s p o n s
e
图17 模糊控制系统响应曲线(加死区和饱和特性)
00.20.40.60.81time/s
s t e p r e s p o n s e
图18 PID 控制系统响应曲线(加死区和饱和特性)。