基于MATLAB的模糊控制汽车倒车仿真系统PPT课件
- 格式:pptx
- 大小:1.06 MB
- 文档页数:21

基于MA T L A B模糊逻辑工具箱的模糊控制系统仿真分析——汽车自动倒车系统MATLAB软件提供自动控制、信号处理、神经网络、模糊逻辑、小波分析、图象处理等诸多工具箱,功能强大应用广泛。
本文是基于MATLAB的模糊逻辑工具箱(Fuzzy Logic)设计的模糊控制器和SIMULINK仿真进行的分析。
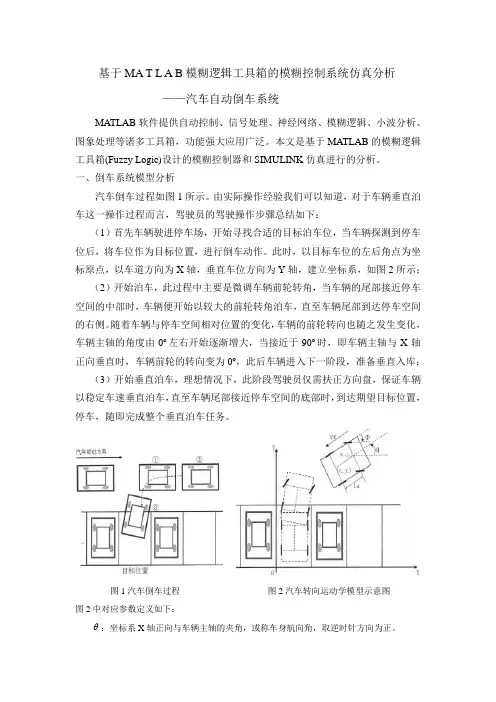
一、倒车系统模型分析汽车倒车过程如图1所示。
由实际操作经验我们可以知道,对于车辆垂直泊车这一操作过程而言,驾驶员的驾驶操作步骤总结如下:(1)首先车辆驶进停车场,开始寻找合适的目标泊车位,当车辆探测到停车位后,将车位作为目标位置,进行倒车动作。
此时,以目标车位的左后角点为坐标原点,以车道方向为X轴,垂直车位方向为Y轴,建立坐标系,如图2所示;(2)开始泊车,此过程中主要是微调车辆前轮转角,当车辆的尾部接近停车空间的中部时,车辆便开始以较大的前轮转角泊车,直至车辆尾部到达停车空间的右侧。
随着车辆与停车空间相对位置的变化,车辆的前轮转向也随之发生变化,车辆主轴的角度由0o左右开始逐渐增大,当接近于90o时,即车辆主轴与X轴正向垂直时,车辆前轮的转向变为0o,此后车辆进入下一阶段,准备垂直入库;(3)开始垂直泊车,理想情况下,此阶段驾驶员仅需扶正方向盘,保证车辆以稳定车速垂直泊车,直至车辆尾部接近停车空间的底部时,到达期望目标位置,停车,随即完成整个垂直泊车任务。
图1汽车倒车过程图2汽车转向运动学模型示意图图2中对应参数定义如下::坐标系X轴正向与车辆主轴的夹角,或称车身航向角,取逆时针方向为正。
φ:车辆前轮方向与车辆主轴夹角,或前轮转角,取顺时针方向为正。
La :车辆前后轮轴线中心坐标的间距,或称为轴距。
f v :代表车辆运动速度,汽车倒车时为正,汽车前进时为负。
),(f f y x :车辆前轮轴线中心坐标。
),(r r y x :车辆后轮轴线中心坐标。
该运动学模型的建立是在假设车辆的前轮速度恒定的条件下,汽车倒车过程中低速行驶的,车辆轮胎不需要产生侧向力,遵循阿克曼转向规律,此时可以用车辆的运动学模型代替动力学模型,运动学分析如下:(1)由于整个倒车过程中的速度很低,最高车速要求不超过3km/h ,即v ≤3km/h 。
摘要倒立摆系统是研究控制理论的一种典型的实验装置,广泛应用于控制理论研究,航空航天控制等领域,其控制研究对于自动化控制领域具有重要的价值。
然而,倒立摆装置是一个绝对不稳定系统,具有高阶次、非线性、强耦合等特性,本文应用模糊控制策略对其进行控制研究。
本文应用牛顿力学定律建立了直线一级倒立摆的状态方程数学模型并推导了简化的传递函数数学模型,分析了其稳定性,可控性和可观测性。
研究了控制系统整体结构,建立了模糊控制器,在MATLAB平台上对模糊控制系统进行了仿真研究,并对获得的控制系统输出图进行了性能分析。
关键词:一阶倒立摆,数学模型,模糊控制, MATLAB仿真AbstractInverted pendulum control system is to study the theory of a typical experimental device, widely used in control theory, the field of aerospace control, its control is important for the automation and control value. However, the inverted pendulum device is an absolute unstable system, with high time, nonlinear, strong coupling and other features, this fuzzy control strategy to control research.In this paper, Newton's laws of mechanics to establish a line-level inverted pendulum equation of state mathematical model to derive the simplified transfer function model to analyze its stability, controllability and observability. Of the control system as a whole structure of a fuzzy controller, in the MATLAB platform for fuzzy control system was simulated, and access control system output graph of the performance analysis.Keywords: inverted pendulum, mathematical model, fuzzy control, MATLAB simulation目录摘要 (i)Abstract (ii)第一章倒立摆系统简介 (1)1.1倒立摆系统概述 (1)1.2倒立摆的控制目标及研究意义 (1)1.3倒立摆系统控制方法简介 (2)1.4论文的主要工作 (4)第二章模糊控制概述 (6)2.1控制理论简介 (6)2.1.1经典控制理论 (6)2.1.2现代控制理论 (6)2.1.3模糊控制与经典控制理论的比较 (8)2.2模糊控制的数学基础 (9)2.2.1模糊子集与运算 (9)2.2.2模糊关系与模糊关系合成 (11)2.2.3模糊推理 (12)第三章控制系统分析与模糊控制方法研究 (15)3.1控制系统结构及工作原理 (15)3.1.1控制系统结构 (15)3.1.2模糊控制器的工作原理 (16)3.2精确量的模糊化 (17)3.2.1模糊控制器的语言变量 (17)3.2.2量化因子与比例因子 (17)3.2.3语言变量值的选取 (18)3.2.4语言变量论域上的模糊子集 (18)3.3常见的模糊控制规则 (19)3.4输出信息的模糊判决 (20)3.4.1基于推理合成规则进行模糊推理 (20)3.4.2输出信息的模糊判决 (20)3.5本章小结 (21)第四章倒立摆系统建模 (21)4.1常见的倒立摆类型 (21)4.2倒立摆系统建模 (23)4.3系统可控性分析 (27)第五章倒立摆模糊控制器的设计及仿真 (29)5.1倒立摆的稳定模糊控制器的设计 (29)5.1.1位置模糊控制器的设计 (29)5 .1.2角度模糊控制器的设计 (34)5.1.3稳定控制器的实现 (34)5. 2一级倒立摆系统仿真 (35)5.2.1 Simulink简介 (36)5.2.2系统仿真 (37)第六章总结 (44)致谢 (45)参考文献 ......................................................................................................................... 错误!未定义书签。