运算放大器增益稳定性第3部分:AC增益误差分析
- 格式:pdf
- 大小:889.24 KB
- 文档页数:7
增益误差和失调误差的校准方法在电子测量和控制系统领域,增益误差和失调误差是常见的误差源。
这些误差会影响系统的性能和测量精度。
为了提高系统的性能和测量精度,需要进行增益误差和失调误差的校准。
本文将介绍增益误差和失调误差的校准方法,包括校准增益、校准失调误差、调整硬件、软件补偿和定期校准等方面。
一、校准增益增益误差是指放大器增益的偏差,对系统性能的影响较大。
校准增益的方法一般有两种:使用标准信号源和通过比较测量。
1.使用标准信号源校准:将标准信号源输入到系统中,调整放大器的增益,使得输出信号达到标准值。
这种方法需要使用高精度的标准信号源,对设备的要求较高。
2.通过比较测量校准:将待校准系统和标准系统进行比较测量,通过比较两者的输出结果来校准增益误差。
这种方法不需要高精度的标准信号源,但需要一个性能稳定的标准系统。
二、校准失调误差失调误差是指放大器输入为零时,输出值不为零的现象。
校准失调误差的方法一般有两种:使用零输入法和软件补偿法。
1.使用零输入法校准:将放大器的输入信号置零,观察其输出值是否为零。
如果不是,则需要进行调整。
这种方法适用于大部分的放大器。
2.软件补偿法校准:通过软件算法对失调误差进行补偿,使得输出信号更加准确。
这种方法需要编写相应的软件程序,但补偿效果较好。
三、调整硬件如果增益误差和失调误差较大,可能需要对硬件进行调整。
例如,可以调整放大器的内部电阻或电容等元件,以改变其性能参数,从而减小误差。
调整硬件需要具备一定的电子技术和经验,操作时要小心谨慎。
四、软件补偿对于一些无法通过硬件调整的误差,可以通过软件补偿的方法进行校准。
例如,可以编写程序对输出信号进行数字滤波或算法处理,以减小误差对系统性能的影响。
软件补偿方法需要具备一定的编程能力,但实现起来较为方便。
五、定期校准为了确保系统的长期稳定性和准确性,需要定期进行增益误差和失调误差的校准。
可以根据实际情况确定校准周期,一般建议至少每年进行一次校准。
电压反馈运算放大器的稳定性分析及补偿技术1,介绍:电压反馈放大器(VFA)已经有60年的历史,但从第一天起,对电路的设计仍存在问题。
反馈系统是易变的和精密的,但总有不稳定的趋势。
运算放大器电路结构使用了一个高增益放大器,它的参数取决于外部的反馈元件,如果没有反馈元件,放大器的增益非常高。
最轻微的输入信号都会使输出饱合。
运放是一个通用元件,所以这个结构的研究要很细致,但结果在很多电压反馈电路中都是可用的。
电流反馈放大器(CFA)很象电压反馈放大器(VFA),但其间的差异很重要,在隔离反馈系统中应用时要确保CFA在掌控之中。
稳定性作为电子电路中的术语,常定义为实现无振荡状态,这是一个不准确不恰当的定义词汇。
稳定性是个相对概念,而其饱合使人们不易处理,因为相对地评判已经用尽,它很容易在一个电路之间画一条线,是振荡还是不振荡。
所以我们能了解为什么一些人相信振荡是稳定和不稳定之间的一条边界线。
反馈电路展示出一个拙劣的相位响应,过冲及振荡之前的振铃。
这些现象在电路设计时都要考虑到,而且是不希望有的。
本文不去涉及振荡器,于是相对的稳定性定义为一项性能。
根据此定义,当设计师决定在可接受的相对稳定的电路中有些折衷,相对的稳定性的测量是阻尼的比例(ζ)阻尼比的细节讨论见参考文件1。
阻尼比相对于相位移动是另一个稳定性的测量标准。
多数稳定电路都有较长的响应时间,低的带宽,高的精度及少的过冲。
欠稳定的电路有最快的响应时间,最高的带宽,低的精度及一些过冲。
放大器由有源元件诸如晶体管一类组成。
合适的晶体管参数象晶体管增益,提供一个漂移及初始的来自各方的非精密度。
所以放大器由这些元件组合时就存在了漂移和非精密状态。
而漂移和非精准要用负反馈来消除。
运放电路结构采用反馈系统使电路的传输函数与放大器特性无关。
做到了这一点,电路的传输函数就只取决于外部元件。
外部的无源元件几乎可以满足漂移和精度的规范,仅有成本和几何尺寸限制这些无源元件的使用。
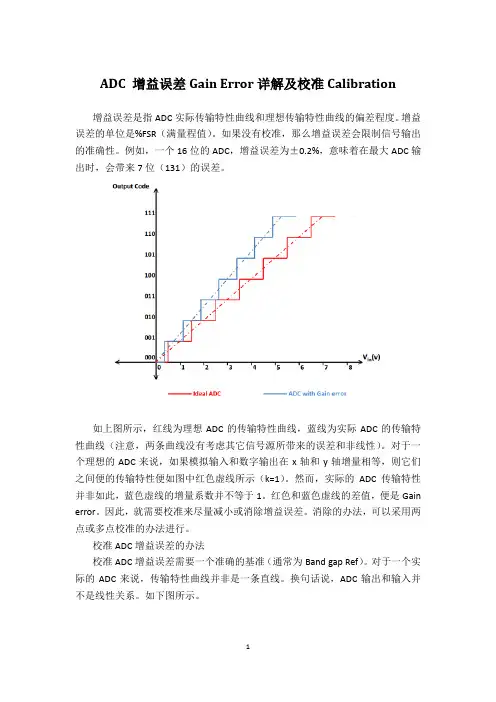
ADC 增益误差Gain Error详解及校准Calibration增益误差是指ADC实际传输特性曲线和理想传输特性曲线的偏差程度。
增益误差的单位是%FSR(满量程值)。
如果没有校准,那么增益误差会限制信号输出的准确性。
例如,一个16位的ADC,增益误差为±0.2%,意味着在最大ADC输出时,会带来7位(131)的误差。
如上图所示,红线为理想ADC的传输特性曲线,蓝线为实际ADC的传输特性曲线(注意,两条曲线没有考虑其它信号源所带来的误差和非线性)。
对于一个理想的ADC来说,如果模拟输入和数字输出在x轴和y轴增量相等,则它们之间便的传输特性便如图中红色虚线所示(k=1)。
然而,实际的ADC传输特性并非如此,蓝色虚线的增量系数并不等于1。
红色和蓝色虚线的差值,便是Gain error。
因此,就需要校准来尽量减小或消除增益误差。
消除的办法,可以采用两点或多点校准的办法进行。
校准ADC增益误差的办法校准ADC增益误差需要一个准确的基准(通常为Band gap Ref)。
对于一个实际的ADC来说,传输特性曲线并非是一条直线。
换句话说,ADC输出和输入并不是线性关系。
如下图所示。
最常用的一种校准方法是两点标定法。
这一方法假定ADC传输特性是一条直线。
这种方法对于低输入是一个很好的选择,并有效地降低校准的成本。
在两点标定中,一个点可以选在AD输入的最低点,另一个选在接近最高点处。
举例来说,一个单端输入的ADC,输入范围为0-2.2V,我们可以采用一个基准为Vref1=0V和一个为Vref2=2.049V的来进行校准。
校准公式为:增益系数=(Vref2时实际输出- Vref1时实际输出)/(Vref2时理想输出- Vref1时理想输出)例如,一个输出对于一个Vref时的实际输出为99,而增益系数通过计算为0.008,则实际输出为99*1.008=99.792.另外一种方法是多点标定法,就是采用将ADC输入范围划分成不同的区间,每个区间上用两点标定的方法进行。
运算放大器工作原理及误差分析1.模拟运放的分类及特点模拟运算放大器从诞生至今,已有40多年的历史了。
最早的工艺是采用硅NPN工艺,后来改进为硅NPN-PNP工艺(后面称为标准硅工艺)。
在结型场效应管技术成熟后,又进一步的加入了结型场效应管工艺。
当MOS管技术成熟后,特别是CMOS技术成熟后,模拟运算放大器有了质的飞跃,一方面解决了低功耗的问题,另一方面通过混合模拟与数字电路技术,解决了直流小信号直接处理的难题。
经过多年的发展,模拟运算放大器技术已经很成熟,性能曰臻完善,品种极多。
这使得初学者选用时不知如何是好。
为了便于初学者选用,本文对集成模拟运算放大器采用工艺分类法和功能/性能分类分类法等两种分类方法,便于读者理解,可能与通常的分类方法有所不同。
1.1.根据制造工艺分类根据制造工艺,目前在使用中的集成模拟运算放大器可以分为标准硅工艺运算放大器、在标准硅工艺中加入了结型场效应管工艺的运算放大器、在标准硅工艺中加入了MOS工艺的运算放大器。
按照工艺分类,是为了便于初学者了解加工工艺对集成模拟运算放大器性能的影响,快速掌握运放的特点。
标准硅工艺的集成模拟运算放大器的特点是开环输入阻抗低,输入噪声低、增益稍低、成本低,精度不太高,功耗较高。
这是由于标准硅工艺的集成模拟运算放大器内部全部采用NPN-PNP管,它们是电流型器件,输入阻抗低,输入噪声低、增益低、功耗高的特点,即使输入级采用多种技术改进,在兼顾起啊挺能的前提下仍然无法摆脱输入阻抗低的问题,典型开环输入阻抗在1M欧姆数量级。
为了顾及频率特性,中间增益级不能过多,使得总增益偏小,一般在80~110dB之间。
标准硅工艺可以结合激光修正技术,使集成模拟运算放大器的精度大大提高,温度漂移指标目前可以达到0.15ppm。
通过变更标准硅工艺,可以设计出通用运放和高速运放。
典型代表是LM324。
在标准硅工艺中加入了结型场效应管工艺的运算放大器主要是将标准硅工艺的集成模拟运算放大器的输入级改进为结型场效应管,大大提高运放的开环输入阻抗,顺带提高通用运放的转换速度,其它与标准硅工艺的集成模拟运算放大器类似。
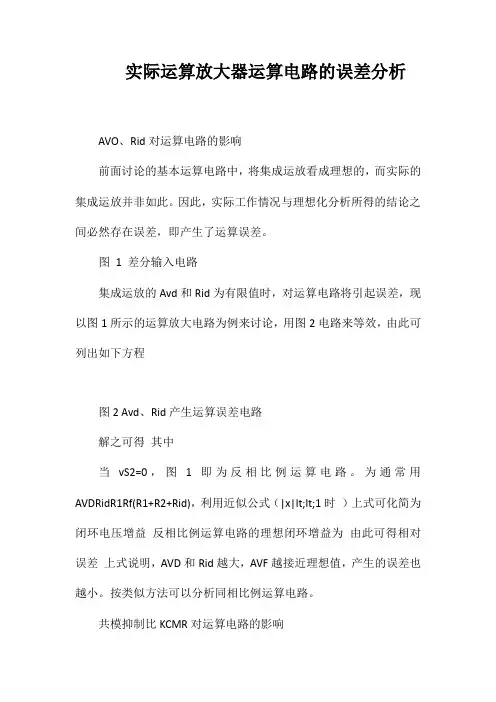
实际运算放大器运算电路的误差分析AVO、Rid对运算电路的影响前面讨论的基本运算电路中,将集成运放看成理想的,而实际的集成运放并非如此。
因此,实际工作情况与理想化分析所得的结论之间必然存在误差,即产生了运算误差。
图1 差分输入电路集成运放的Avd和Rid为有限值时,对运算电路将引起误差,现以图1所示的运算放大电路为例来讨论,用图2电路来等效,由此可列出如下方程图2 Avd、Rid产生运算误差电路解之可得其中当vS2=0,图1即为反相比例运算电路。
为通常用AVDRidR1Rf(R1+R2+Rid),利用近似公式(|x|lt;lt;1时)上式可化简为闭环电压增益反相比例运算电路的理想闭环增益为由此可得相对误差上式说明,AVD和Rid越大,AVF越接近理想值,产生的误差也越小。
按类似方法可以分析同相比例运算电路。
共模抑制比KCMR对运算电路的影响以同相运算放大电路为例,集成运放的共模抑制比KCMR为有限时,对运算电路引起的误差近似为由此可见,AVD和KCMR越大,误差越小,AVF越接近理想情况下的值。
误差推导过程由图1的电路有差模输入电压为共模输入电压为运算放大电路总的输出电压为理想情况下,,由此求得相对误差式中为电压反馈系数。
通常,,因此上式简化为输入失调电压、输入失调电流对运算电路的影响输入失调电压VIO、输入失调电流IIO不为零时,运算电路的输出电压将产生误差。
根据VIO和IIO的定义,将运放用图1来等效,其中小三角符号内代表理想运放。
利用戴维南定理和诺顿定理可将两输入端化简,如图2所示,则因为,有,则由上两式求出由于电路中两输入端均接地,在VIO、IIB和IIO作用下,产生的输出电压VO即是绝对误差。
若R2=R1//Rf,由IIB引起的误差可以消除,输出电压变为由上式可见,和R2越大,VIO和IIO引起的输出误差电压也越大。
当用作积分运算时,因电容C代替Rf,输出误差电压为则由上式可见,积分时间常数t=R1C越小或积分时间越长,误差越大。
运放稳定性第1部分(共15部分):环路稳定性基础作者:Tim Green ,TI 公司Burr-Brown 产品战略发展经理1.0 引言本系列所采用的所有技术都将“以实例来定义”,而不管它在其他应用中能否用普通公式来表达。
为便于进行稳定性分析,我们在工具箱中使用了多种工具,包括数据资料信息、技巧、经验、SPICE 仿真以及真实世界测试等,都将用来加快我们的稳定运放电路设计。
尽管很多技术都适用于电压反馈运放,但上述这些工具尤其适用于统一增益带宽小于20MHz 的电压反馈运放。
选择增益带宽小于20MHz 的原因是,随着运放带宽的增加,电路中的其他一些主要因素会形成回路,如印制板 (PCB) 上的寄生电容、电容中的寄生电感以及电阻中的寄生电容与电感等。
我们下面介绍的大多数经验与技术并非仅仅是理论上的,而且是从利用增益带宽小于20MHz 的运放、实际设计并构建真实世界电路中得来的。
本系列的第1部分回顾了进行稳定性分析所需的一些基本知识,并定义了将在整个系列中使用的一些术语。
9Data Sheet Info 9Tricks 9Rules-Of-Thumb 9Tina SPICE Simulation9TestingGoal:EASILY Tricks & Rules-Of-Thumb apply for Voltage FeedbackOp Amps, Unity Gain Bandwidth <20MHzTo learn how to analyze and design Op Amp circuits for guaranteed Loop Stability using Data Sheet Info, Tricks, Rules-Of-Thumb, Tina SPICE Simulation, and Testing.Note:图1.0 稳定性分析工具箱图字(上、下):数据资料信息、技巧、经验、Tina SPICE 仿真、测试;目的:学习如何用数据资料信息、技巧、经验法则、Tina SPICE 仿真及测试来“更容易地”分析和设计运放,以确保环路稳定性;注:用于统一增益带宽小于20MHz 的电压反馈运放的技巧与经验法则。
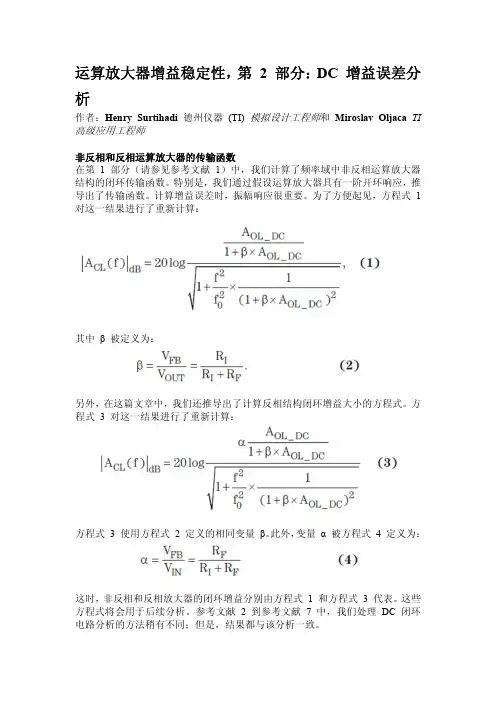
运算放大器增益稳定性,第 2 部分:DC 增益误差分析作者:Henry Surtihadi 德州仪器(TI)模拟设计工程师和Miroslav Oljaca TI 高级应用工程师非反相和反相运算放大器的传输函数在第 1 部分(请参见参考文献1)中,我们计算了频率域中非反相运算放大器结构的闭环传输函数。
特别是,我们通过假设运算放大器具有一阶开环响应,推导出了传输函数。
计算增益误差时,振幅响应很重要。
为了方便起见,方程式 1 对这一结果进行了重新计算:其中β 被定义为:另外,在这篇文章中,我们还推导出了计算反相结构闭环增益大小的方程式。
方程式 3 对这一结果进行了重新计算:方程式 3 使用方程式 2 定义的相同变量β。
此外,变量α 被方程式 4 定义为:这时,非反相和反相放大器的闭环增益分别由方程式 1 和方程式 3 代表。
这些方程式将会用于后续分析。
参考文献 2 到参考文献7中,我们处理DC 闭环电路分析的方法稍有不同;但是,结果都与该分析一致。
非反相结构的DC 增益误差为了描述非反相结构中,运算放大器有限开环增益对DC 闭环增益精确度的影响,我们将介绍一个循序渐进的例子,旨在说明运算放大器处在某个理想闭环增益下时如何计算增益误差。
我们将使用一个200(1/b = 200) 的理想闭环增益,如图 1 所示。
该举例只重点介绍如何使用TI OPA211 运算放大器,但电路设计人员可以选择使用任何其他运算放大器,利用其说明书提供的类似值重复进行这种计算。
图 1 +200 理想闭环增益的非反相运算放大器结构为了计算非反相运算放大器的DC 闭环增益误差,我们对方程式 1 进行了零频率(f = 0 Hz) 评估:假设为一个具有无限开环增益的理想运算放大器,则非反相结构的DC 闭环增益降至:换句话就是说,DC 闭环增益完全取决于外部反馈网络。
由第 1 部分(请参见参考文献1)中图 3 和图 6 的非反相和反相放大器的闭环模型,我们知道,运算放大器的开环增益为V OUT 与输入误差电压V ERR 的比。
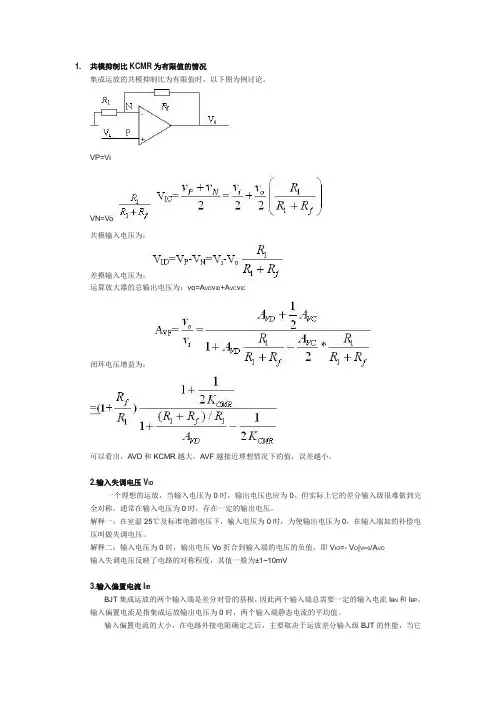
1. 共模抑制比KCMR为有限值的情况集成运放的共模抑制比为有限值时,以下图为例讨论。
VP=ViVN=Vo共模输入电压为:差摸输入电压为:运算放大器的总输出电压为:vo=A VD v ID+A VC v IC闭环电压增益为:可以看出,AVD和KCMR越大,AVF越接近理想情况下的值,误差越小。
2.输入失调电压V IO一个理想的运放,当输入电压为0时,输出电压也应为0。
但实际上它的差分输入级很难做到完全对称。
通常在输入电压为0时,存在一定的输出电压。
解释一:在室温25℃及标准电源电压下,输入电压为0时,为使输出电压为0,在输入端加的补偿电压叫做失调电压。
解释二:输入电压为0时,输出电压Vo折合到输入端的电压的负值,即V IO=- V O|VI=0/A VO输入失调电压反映了电路的对称程度,其值一般为±1~10mV3.输入偏置电流I IBBJT集成运放的两个输入端是差分对管的基极,因此两个输入端总需要一定的输入电流I BN和I BP。
输入偏置电流是指集成运放输出电压为0时,两个输入端静态电流的平均值。
输入偏置电流的大小,在电路外接电阻确定之后,主要取决于运放差分输入级BJT的性能,当它的β值太小时,将引起偏置电流增加。
偏置电流越小,由于信号源内阻变化引起的输出电压变化也越小。
其值一般为10nA~1uA。
4.输入失调电流I IO在BJT集成电路运放中,当输出电压为0时,流入放大器两输入端的静态基极电流之差,即I IO=|I BP-I BN| 由于信号源内阻的存在,I IO会引起一个输入电压,破坏放大器的平衡,使放大器输出电压不为0。
它反映了输入级差分对管的不对称度,一般约为1nA~0.1uA。
5.输入失调电压VIO、输入失调电流IIO不为0时,运算电路的输出端将产生误差电压。
设实际的等效电路如下图大三角符号,小三角符号内为理想运放,根据VIO和IIO的定义画出。
为了分析方便,假设运放的开环增益AVO和输入电阻Ri均为无限大,外电路电阻R2=R1||Rf,利用戴维南定理和诺顿定理可得两输入端的等效电压和等效电阻,如下图所示则可得同相输入端电压反向输入端电压因AVO→∞,有V P≈V N,代入得Vo=(1+Rf/R1)[VIO+IIB(R1||Rf-R2)+ IIO(R1||Rf+R2)]当取R2=R1||Rf时,由输入偏置电流IIB引起的输入误差电压可以消除,上式可简化为V o=(1+R f/R1)(V IO+I IO R2)可见,1+Rf/R1 和R2越大,V IO和I IO引起的输出误差电压越大。
1. 共模抑制比KCMR为有限值的情况集成运放的共模抑制比为有限值时,以下图为例讨论。
VP=ViVN=Vo共模输入电压为:差摸输入电压为:运算放大器的总输出电压为:vo=A VD v ID+A VC v IC闭环电压增益为:可以看出,AVD和KCMR越大,AVF越接近理想情况下的值,误差越小。
2.输入失调电压V IO一个理想的运放,当输入电压为0时,输出电压也应为0。
但实际上它的差分输入级很难做到完全对称。
通常在输入电压为0时,存在一定的输出电压。
解释一:在室温25℃及标准电源电压下,输入电压为0时,为使输出电压为0,在输入端加的补偿电压叫做失调电压。
解释二:输入电压为0时,输出电压Vo折合到输入端的电压的负值,即V IO=- V O|VI=0/A VO输入失调电压反映了电路的对称程度,其值一般为±1~10mV3.输入偏置电流I IBBJT集成运放的两个输入端是差分对管的基极,因此两个输入端总需要一定的输入电流I BN和I BP。
输入偏置电流是指集成运放输出电压为0时,两个输入端静态电流的平均值。
输入偏置电流的大小,在电路外接电阻确定之后,主要取决于运放差分输入级BJT的性能,当它的β值太小时,将引起偏置电流增加。
偏置电流越小,由于信号源内阻变化引起的输出电压变化也越小。
其值一般为10nA~1uA。
4.输入失调电流I IO在BJT集成电路运放中,当输出电压为0时,流入放大器两输入端的静态基极电流之差,即I IO=|I BP-I BN| 由于信号源内阻的存在,I IO会引起一个输入电压,破坏放大器的平衡,使放大器输出电压不为0。
它反映了输入级差分对管的不对称度,一般约为1nA~0.1uA。
5.输入失调电压VIO、输入失调电流IIO不为0时,运算电路的输出端将产生误差电压。
设实际的等效电路如下图大三角符号,小三角符号内为理想运放,根据VIO和IIO的定义画出。
为了分析方便,假设运放的开环增益AVO和输入电阻Ri均为无限大,外电路电阻R2=R1||Rf,利用戴维南定理和诺顿定理可得两输入端的等效电压和等效电阻,如下图所示则可得同相输入端电压反向输入端电压因AVO→∞,有V P≈V N,代入得Vo=(1+Rf/R1)[VIO+IIB(R1||Rf-R2)+ IIO(R1||Rf+R2)]当取R2=R1||Rf时,由输入偏置电流IIB引起的输入误差电压可以消除,上式可简化为V o=(1+R f/R1)(V IO+I IO R2)可见,1+Rf/R1 和R2越大,V IO和I IO引起的输出误差电压越大。
运算放大器增益稳定性,第 3 部分:AC 增益误差分析作者:Miroslav Oljaca 德州仪器(TI)高级应用工程师和Henry Surtihadi TI 模拟设计工程师增益带宽乘积的重要性本小节将回顾运算放大器增益带宽乘积(GBWP) 即G×BW 概念。
在计算AC 闭环增益以前需要GBWP 这一参数。
首先,我们需要GBWP(有时也称作GBP),用于计算运算放大器闭环截止频率。
另外,我们在计算运算放大器开环响应的主极点频率f0时也需要GBWP。
在f0以下频率,第2 部分的DC 增益误差计算方法有效,因为运算放大器的开环增益为恒定;该增益等于A OL_DC (请参见参考文献 1 和参考文献2)。
但是,超出f0频率以后,则必须使用AC 计算方法,我们将在后面小节详细讨论。
一般而言,如果运算放大器有直线、–20-dB/十倍频、开环增益滚降,则其具有恒定GBWP。
就某个选定闭环增益而言,闭环增益开始下降的截止频率可通过将GBWP 除以理想闭环增益来计算得到。
请注意,实际上得到的闭环响应–3-dB 点可能不会刚好等于增益峰值和其他非理想因数计算得到的滚降点。
图 1 显示了简化开环增益与TI OPA211 频率响应的对比情况。
在产品说明书中,GBWP 针对两种不同的增益:1 (GBWP=45 MHz) 和100 (GBWP=80 MHz)。
使用这两种增益规范的原因是OPA211 的开环增益响应在大约4MHz 到20MHz 频率区域有一个额外的极点-零点对。
这是一个特例,其与先前的叙述(带直线-20-dB/十倍频滚降的运算放大器只有一个GBWP)相反。
因此,80MHz 的GBWP 应用于计算100 或更高闭环增益运算放大器的截止频率,而45MHz 的GBWP 应用于2 或更低闭环增益的运算放大器。
如果4MHz 以上频率区域需要使用更加精确的计算,则我们建议使用SPICE 仿真。
使用规定的GBWP 可让设计人员计算不同闭环增益的截止频率。
运算放大器增益稳定性,第 3 部分:AC 增益误差分析作者:Miroslav Oljaca 德州仪器(TI)高级应用工程师和Henry Surtihadi TI 模拟设计工程师增益带宽乘积的重要性本小节将回顾运算放大器增益带宽乘积(GBWP) 即G×BW 概念。
在计算AC 闭环增益以前需要GBWP 这一参数。
首先,我们需要GBWP(有时也称作GBP),用于计算运算放大器闭环截止频率。
另外,我们在计算运算放大器开环响应的主极点频率f0时也需要GBWP。
在f0以下频率,第2 部分的DC 增益误差计算方法有效,因为运算放大器的开环增益为恒定;该增益等于A OL_DC (请参见参考文献 1 和参考文献2)。
但是,超出f0频率以后,则必须使用AC 计算方法,我们将在后面小节详细讨论。
一般而言,如果运算放大器有直线、–20-dB/十倍频、开环增益滚降,则其具有恒定GBWP。
就某个选定闭环增益而言,闭环增益开始下降的截止频率可通过将GBWP 除以理想闭环增益来计算得到。
请注意,实际上得到的闭环响应–3-dB 点可能不会刚好等于增益峰值和其他非理想因数计算得到的滚降点。
图 1 显示了简化开环增益与TI OPA211 频率响应的对比情况。
在产品说明书中,GBWP 针对两种不同的增益:1 (GBWP=45 MHz) 和100 (GBWP=80 MHz)。
使用这两种增益规范的原因是OPA211 的开环增益响应在大约4MHz 到20MHz 频率区域有一个额外的极点-零点对。
这是一个特例,其与先前的叙述(带直线-20-dB/十倍频滚降的运算放大器只有一个GBWP)相反。
因此,80MHz 的GBWP 应用于计算100 或更高闭环增益运算放大器的截止频率,而45MHz 的GBWP 应用于2 或更低闭环增益的运算放大器。
如果4MHz 以上频率区域需要使用更加精确的计算,则我们建议使用SPICE 仿真。
使用规定的GBWP 可让设计人员计算不同闭环增益的截止频率。
运算放大器为单位增益结构时(闭环增益为1),截止频率为45MHz(45MHz/1),其也被称作运算放大器的单位增益带宽(UGBW)。
如果运算放大器的闭环增益为100,则截止频率为800kHz (80MHz/100)。
若要计算OPA211 的主极点频率(f o),需使用80MHz 的GBWP。
另外,80MHz 对100 或更高(最大为A OL_DC 值)的闭环增益有效。
114dB 的值为室温下OPA211 的最小保证DC 开环增益,将用于A OL_DC。
将所有这些参数代入至方程式 1 得到:下面小节将会用到这一结果以计算AC 闭环增益。
AC 闭环增益计算在第 1 部分中,我们计算了频率范围中非反相运算放大器结构的闭环传输函数。
特别是,推导出该传输函数的假设条件是运算放大器有一个一阶开环响应。
计算增益误差时,振幅响应很重要。
为了方便起见,下列方程式中再次给出了这一结果:其中β 定义为另外,也是在这一篇文章中,我们还推导出了计算反相结构闭环增益的方程式。
方程式 4 再次给出了该结果:方程式 4 使用方程式 3 定义的相同变量β。
另外,方程式 5 定义了变量α:这样,方程式 2 和方程式 4 便分别表示了非反相和反相放大器的闭环增益。
这两个方程式计算了传输函数的振幅,并将用于后面的分析。
在第 2 部分中,我们计算了非反相运算放大器结构的DC 闭环传输函数。
另外,传输函数的推导假设条件是运算放大器有一个一阶开环响应。
通过在方程式 2 和 4 中设置 f 等于0,可推导出非反相和反相放大器的DC 闭环增益,其得到下列两个方程式:在其他刊发的文章(参考文献 3 到8)中,我们使用两种稍稍不同的方法,推导出了DC 闭环增益;但是,结果与本分析一致。
遗憾的是,相同文章中,我们只需在方程式 6 和7 中用A OL(f) 代替A OL_DC便可推导出AC 闭环增益表达式,其代表一些简单的传输函数。
方程式8 和9 给出了这些结果:在这两个方程式中,假设一个一阶系统,则A OL(f) 定义如下:然而,计算AC 闭环增益时这并非是一种正确的方法。
相反,我们应该使用方程式 2 和4,其为闭环传输函数的振幅表达式。
就非反相结构而言,我们应该使用方程式 2 而非方程式8,而就反相结构而言,应该使用方程式 4 而非方程式9。
接下来的两个小节,将介绍使用正确和错误方程式计算增益所得结果的差异。
图 2 非反相结构(G=200V/V) 中OPA211 的闭环响应表 1 非反相结构(G=200V/V 或46dB)中OPA211 的闭环增益非反相结构的AC 增益误差如前所述,系统设计人员往往会将方程式10 代入方程式8 中,以计算非反相结构的AC 增益。
图 2 显示了使用这种方法与使用方程式 2 得到的OPA211 闭环响应的差异。
本例中,闭环增益设定为200V/V(β= 1/200)。
图 2 清楚地表明了使用两个方程式之间的差异,主要位于开环和闭环曲线(也就是截止频率)之间理论交集前后的十倍频区域内。
从前面的GBWP 讨论,我们可以知道200V/V 增益的OPA211 具有400 kHz (80 MHz/200) 的截止频率。
表1 以表格的形式显示了一些选定频率的图2 所示值。
10kHz 和100kHz 频率时,该表格显示频率响应之间存在相当的差异。
相比使用方程式 2 时从约199 V/V 下降到194 V/V,使用方程式8 计算所得闭环增益从约195 V/V 下降到160 V/V。
截止频率为400kHz 时出现最大差异,其误差为29% 即3dB。
这些差异可被看作是增益误差,如图 3 所示。
图 3 方程式8 得到的OPA211 闭环增益误差上述分析表明,在选择正确的组件时,正确地理解增益误差极为重要。
如果设计要求闭环增益平直度保持在某个指定余量范围内,则使用方程式8 会使设计人员选择一个UGBW 高出实际需要10 倍的运算放大器。
图 4 反相结构(G=-200V/V) 中OPA211 的闭环响应表 2 反相结构(G=-200V/V 或46dB)中OPA211 的闭环增益反相结构的AC 增益误差与非反相结构类似,大多数系统设计人员都会使用方程式9 和10 来计算反相结构的AC 增益。
图 4 显示了使用方程式 4 和9 所得闭环增益的差异。
本例中,运算放大器被设置为-200V/V 反相增益(β = 1/201, α= 200/201)。
从图 4 我们可以看到,最重要的结果差异同样位于截止频率前后约十倍频的区域内。
表 2 以表格形式显示了一些选定频率的图 4 所示值。
10kHz 和100kHz 频率时,表 2 显示了非反相结构的相同频率响应差异。
相比使用方程式 4 时从约199 V/V 下降到194 V/V,使用方程式9 计算所得闭环增益从约195 V/V 下降到160 V/V。
同样,截止频率为400kHz 时出现最大差异,其误差为29% 即3dB。
这些差异可被看作是增益误差,如图 5 所示,从而让我们产生与非反相结构类似的迷惑:如果设计要求闭环增益平直度保持在某个指定余量范围内,则使用方程式9 会使设计人员选择一个UGBW 高出实际需要10 倍的运算放大器。
图 5 方程式9所得OPA211闭环增益误差表 3 AC 闭环增益的计算及SPICE 仿真值SPICE 仿真对比为了验证使用方程式 2 和 4 计算非反相和反相结构AC 闭环增益的有效性,我们把所得结果同TINA-TI™ SPICE 仿真的结果进行了对比。
就本分析而言,我们使用了OPA211 宏模型。
该模拟模型可在下列地址下载到:/docs/prod/folders/print/opa211.html#toolssoftware。
表 3 表明,方程式 2 和 4 的计算结果与SPICE 仿真所得结果很好地匹配,从而证明方程式 2 和 4 确为计算AC 闭环增益的正确方程式。
计算结果和模拟结果稍有差别,因为SPICE 仿真包括了一些非理想的运算放大器因素(例如:输入偏置电流等),而我们的这个简化分析忽略了这些因素。
重要声明德州仪器(TI)及其下属子公司有权在不事先通知的情况下,随时对所提供的产品和服务进行更正、修改、增强、改进或其它更改,并有权随时中止提供任何产品和服务。
客户在下订单前应获取最新的相关信息,并验证这些信息是否完整且是最新的。
所有产品的销售都遵循在订单确认时所提供的TI销售条款与条件。
TI保证其所销售的硬件产品的性能符合TI标准保修的适用规范。
仅在TI保修的范围内,且TI认为有必要时才会使用测试或其它质量控制技术。
除非政府做出了硬性规定,否则没有必要对每种产品的所有参数进行测试。
TI对应用帮助或客户产品设计不承担任何义务。
客户应对其使用TI组件的产品和应用自行负责。
为尽量减小与客户产品和应用相关的风险,客户应提供充分的设计与操作安全措施。
TI不对任何TI专利权、版权、屏蔽作品权或其它与使用了TI产品或服务的组合设备、机器、流程相关的TI知识产权中授予的直接或隐含权限作出任何保证或解释。
TI所发布的与第三方产品或服务有关的信息,不能构成从TI获得使用这些产品或服务的许可、授权、或认可。
使用此类信息可能需要获得第三方的专利权或其它知识产权方面的许可,或是TI的专利权或其它知识产权方面的许可。
对于TI的数据手册或数据表,仅在没有对内容进行任何篡改且带有相关授权、条件、限制和声明的情况下才允许进行复制。
在复制信息的过程中对内容的篡改属于非法的、欺诈性商业行为。
TI对此类篡改过的文件不承担任何责任。
在转售TI产品或服务时,如果存在对产品或服务参数的虚假陈述,则会失去相关TI产品或服务的明示或暗示授权,且这是非法的、欺诈性商业行为。
TI对此类虚假陈述不承担任何责任。
可访问以下URL地址以获取有关其它TI产品和应用解决方案的信息:产品放大器/amplifiers数据转换器/dataconvertersDSP /dsp接口/interface逻辑/logic电源管理/power微控制器/microcontrollers应用音频/audio汽车/automotive宽带/broadband数字控制/control光纤网络/opticalnetwork安全/security电话/telecom视频与成像/video无线/wireless邮寄地址:Texas Instruments,Post Office Box655303,Dallas,Texas75265Copyright©2006,Texas Instruments Incorporated。