纯电动汽车车载信息远程采集与监测系统的设计
- 格式:pptx
- 大小:114.51 KB
- 文档页数:6

新能源汽车实时监控与数据采集系统开发随着科技的不断进步和环境保护意识的提高,新能源汽车在近年来逐渐受到人们的关注和重视。
为了更好地了解和监控新能源汽车的运行情况,并采集相关数据进行分析和研究,需要开发一套实时监控与数据采集系统。
新能源汽车实时监控与数据采集系统主要包括以下几个方面:车辆信息采集、能源消耗监测、行驶状态监控、故障诊断和数据分析等功能。
首先需要采集并记录车辆的基本信息,包括车型、品牌、车牌号、车辆识别号等。
这些信息可以帮助车辆管理人员进行车辆的登记和管理。
需要监测和记录车辆的能源消耗情况。
通过安装传感器和计量仪器,可以实时监测电池的电量和能源的消耗情况。
这些数据可以帮助车辆管理人员了解车辆的能源利用效率,并进行相应的优化措施。
然后,需要实时监控车辆的行驶状态,包括车速、里程、加速度等。
可以通过GPS定位系统和惯性传感器等设备,实时获取车辆的位置和行驶状态。
这些数据可以帮助车辆管理人员进行车辆的调度和监控,并提醒驾驶员注意安全。
还需要开发故障诊断功能。
通过监测车辆的关键参数和传感器数据,可以实时判断车辆是否存在故障,并提供相应的故障代码和诊断建议。
这有助于提早发现和解决潜在的故障问题,确保车辆的安全和可靠性。
需要对采集到的数据进行分析和研究。
可以通过建立数据库和应用数据挖掘技术,对大量的车辆数据进行分析和建模,探索新能源汽车的性能特点和优化方法。
通过比较不同车辆的数据,还可以评估不同车型和品牌的性能差异,并为用户选择合适的车辆提供参考。
新能源汽车实时监控与数据采集系统的开发,可以帮助车辆管理人员更好地了解和监控车辆的运行状况,提高车辆的利用效率和安全性。
通过对采集到的数据进行分析和研究,还可以提供一定的参考和指导,促进新能源汽车的发展和应用。
新能源汽车实时监控与数据采集系统开发一、系统需求分析1.监控范围新能源汽车实时监控与数据采集系统的监控范围应涵盖整车运行状态、电池管理系统、动力系统性能、能源利用效率等方面。
具体包括车速、加速度、电池电量、电池温度、电池健康状况、电机转速、电机温度、轮胎压力等参数。
2.监控频率系统应具备高频率的监控能力,能够对关键参数进行实时监控,并能够快速响应异常情况,及时采取措施进行处理。
3.数据采集系统需要具备良好的数据采集能力,能够对车辆各部件的性能参数进行数据采集,并提供数据存储和管理功能,以便后续分析和应用。
4.数据传输系统需要具备数据传输功能,能够将采集到的数据传输至中心服务器,以便进行综合分析和管理。
5.用户界面系统应该具备直观易懂的用户界面,能够直观地展示车辆的运行状态和相关性能参数,便于用户进行实时监控和管理。
二、系统设计与实现1.硬件设计新能源汽车实时监控与数据采集系统的硬件设计方案应采用高性能、低功耗的嵌入式处理器,搭配多种传感器和数据采集模块,确保对车辆各部件的性能参数进行准确采集和传输。
2.软件开发系统的软件设计应考虑到实时性和稳定性,能够实时监控车辆运行状态,并对异常情况进行预警和处理。
系统的软件应该具备数据存储和管理功能,能够对采集到的数据进行存储、管理和分析,提供给用户进行综合分析和决策。
3.数据传输系统的数据传输方案应选择高效可靠的传输协议,确保采集到的数据能够及时、稳定地传输至中心服务器,并能够保障数据的安全性和完整性。
三、系统功能测试与优化1.功能测试完成系统的硬件和软件的集成,进行系统的功能测试,确保系统能够稳定、准确地对车辆的运行状态进行监控和数据采集。
2.性能优化对系统的性能进行优化,包括提高数据采集和传输效率,优化数据存储和管理模块,提高用户界面的交互体验等,以保障系统的高效性和稳定性。
3.安全测试对系统的安全性进行测试,包括防火墙、数据加密、权限控制等方面,以保障系统的数据安全和用户隐私。
新能源汽车的远程监控与诊断技术随着全球对环境保护的重视程度不断提高,新能源汽车逐渐成为汽车行业的主流趋势。
作为一种可持续发展的解决方案,新能源汽车不仅能够减少对化石燃料的依赖,还能降低车辆的排放量。
然而,随着新能源汽车的普及,如何保障其安全并提高维护效率成为一个亟待解决的问题。
远程监控与诊断技术应运而生,为新能源汽车的管理和维护带来了新的可能性。
1.远程监控技术的重要性新能源汽车的运行状态和性能受到多种因素的影响,包括电池状态、电动机的运行情况、充电系统的工作状况等。
而传统的维修方式需要将车辆带到维修站点进行检修,不仅费时费力,还会造成用户的不便。
远程监控技术能够实时获取车辆的运行数据,并将其传输到管理中心,使得用户和维修人员能够通过互联网远程诊断和管理车辆,极大地提高了维护效率和用户的使用体验。
2.远程监控技术的应用领域远程监控技术在新能源汽车的管理和维护中发挥着重要作用。
在车辆的智能诊断上,远程监控技术能够实时检测车辆的各项参数,如电池的电量、电机的状态、充电器的工作情况等。
当发生异常时,远程监控系统会立即发送警报并提供修复建议,从而减少故障影响和维修成本。
在车辆的安全管理上,远程监控技术可以监测车辆的位置和行驶轨迹,及时发现盗窃或违规行为,并采取相应的措施。
远程监控技术还可以实现车辆远程升级和维护,提供定期保养提醒和故障排查等服务。
3.远程监控技术的挑战与展望然而,远程监控技术在新能源汽车领域仍面临一些挑战。
数据安全问题是远程监控技术的关键问题之一。
在数据传输过程中,需要采取高级加密和身份验证技术来保护用户隐私和车辆信息的安全性。
远程监控技术的普及还需要面对技术标准和法规的制定与完善。
新能源汽车行业需要制定相关的标准和规范,以确保远程监控技术的可靠性和兼容性。
未来,随着5G技术的普及和无线通信技术的进一步发展,远程监控技术将实现更多的创新和应用。
新能源汽车的远程监控与诊断技术是当前汽车行业发展的重要趋势。
基于物联网的智能汽车远程监控与控制系统设计智能汽车是当前汽车行业发展的趋势,而基于物联网的智能汽车远程监控与控制系统更是智能化发展的一个重要方向。
该系统结合了物联网技术、云计算和智能化控制技术,使得汽车可以实现远程监控和控制,提升行车安全和乘车体验。
本文将围绕基于物联网的智能汽车远程监控与控制系统的设计展开论述。
首先,基于物联网的智能汽车远程监控与控制系统设计需要建立一个稳定的通信网络。
这个网络可以通过4G/5G网络、Wi-Fi或蓝牙等技术连接汽车和云平台。
通过这个网络,用户可以实时获取车辆的位置、速度、油耗、故障码等信息,也可以远程控制车辆的锁、解锁、启动、熄火等操作。
同时,这个通信网络需要具备高度的稳定性和安全性,以保证数据传输的可靠性和用户信息的安全。
其次,基于物联网的智能汽车远程监控与控制系统设计需要具备实时监控和追踪功能。
通过在车辆上安装传感器、摄像头等装置,可以实时监控车辆周围环境和驾驶员的行为。
这些传感器可以监测车辆的温度、湿度、压力等参数,以及检测周围交通状况和障碍物。
同时,摄像头可以记录行车记录、事故情况和驾驶员行为,为保险索赔和事故认定提供依据。
第三,基于物联网的智能汽车远程监控与控制系统设计需要具备智能化的预警和提示功能。
通过车辆上的传感器和智能算法,可以实时监测车辆状态,并提供警告和提示。
例如,当车辆检测到胎压异常、发动机故障或刹车系统失效时,系统可以发送警报通知驾驶员采取相应措施。
同时,系统还可以根据驾驶员的行为和周围环境,提供实时导航、交通拥堵提示、油耗优化等功能,提升驾驶安全和行车效率。
此外,基于物联网的智能汽车远程监控与控制系统设计还需要具备远程诊断和维护功能。
通过与车辆的连接,云平台可以实时获取车辆的故障码和诊断数据,为驾驶员提供准确的故障诊断和维修建议。
同时,云平台还可以远程升级车辆的软件和系统,提供最新的功能和性能优化。
这样能够大大简化维修和升级的过程,降低驾驶员的时间和成本投入。
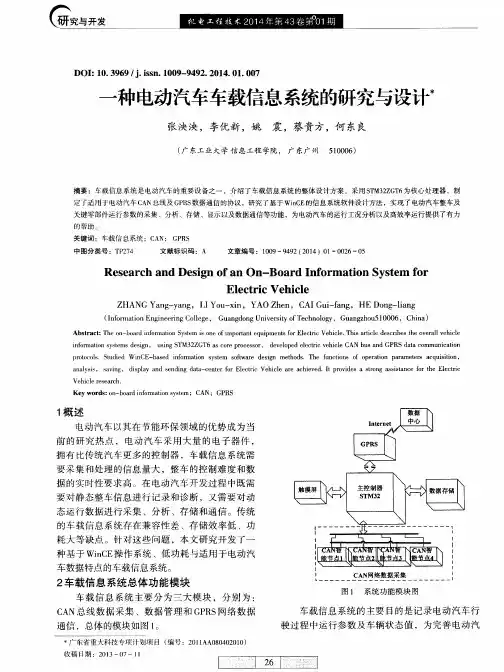
新能源汽车数据采集与状态监测系统刘文军;蒋中;蒋骊冬【摘要】Differing from work logic of traditional vehicles, it is a new trend to design a data acquisition and transmission system which can satisfy the characteristic of green vehicles. Using Samsung S3C6410 as main control chip, a general data acquisition and transmission system is designed, and providing the corresponding wireless data acquisition, transmission and status monitoring system. In the data center, programs running on the servers can effectively monitor vehicles, through analysis and storage of collected data. By collecting and analyzing the huge vehicles data, it can be used to realize the functions such as vehicle parameters optimization and fault diagnosis.%不同于传统汽车工作逻辑,设计满足新能源汽车特征的数据采集与传输系统是一种新趋势.设计了一种基于S3C6410主控芯片的多功能通用车载数据收集模块,并给出了相应的无线数据采集、传输及状态监控系统的实现.在数据中心端,服务器程序通过对采集数据的解析和存储,以Web方式显示实现对运行车辆的实时监控.通过对采集到的大规模车辆数据进行挖掘和分析,可以服务于车辆参数优化、故障诊断等潜在应用.【期刊名称】《计算机系统应用》【年(卷),期】2017(026)006【总页数】5页(P103-107)【关键词】CAN总线;新能源汽车;数据收集;车载终端【作者】刘文军;蒋中;蒋骊冬【作者单位】苏州工业职业技术学院, 苏州 215004;苏州海格新能源汽车电控系统科技有限公司, 苏州 215021;苏州海格新能源汽车电控系统科技有限公司, 苏州215021【正文语种】中文随着汽车工业的飞速发展, 能源消耗问题、环境污染问题日益突出, 大力发展节能、环保的新能源汽车, 通过互联网技术提升汽车产业意义重大. 传统情况下, 客户对车辆的检查一般是通过定期进行车检, 发生故障时需要到专业维修服务机构进行. 纯电动汽车等新能源汽车的机械结构相对传统内燃机汽车结构简单, 传动和运转部件相对较少, 但电气结构更加复杂, 多个分布式子系统构成高集成化的电子系统, 通过控制器局域网络(Controller Area Network, CAN)相互通信. 由于新能源车辆电子、电气状况的复杂, 对于车辆状况的监控更有必要. 本系统打破了传统被动式的服务, 通过构建无线数据采集与传输系统, 方便车辆运行数据的收集, 经过服务器端分析后给技术研发人员、车主、管理人员等提供针对性服务, 如驾驶行为分析[1]、油耗分析[2]、故障诊断[3,4]等.CAN 总线是当今自动化领域中最具应用前景的技术之一, 具有可靠性高、实时性和灵活性强等优势, 提供高达1 Mb/s 的数据传送速率, 适合测控单元之间的互连, 在汽车电子系统中得到了广泛的应用[5,6]. 本系统数据采集模块中车辆数据的获取通过两路CAN总线进行. 图1给出了车辆数据监测与诊断平台组成方案, 包括整车控制器、车载数据传输系统、云端服务器、客户端程序等. 车载数据传输系统对整车控制器(或车载其他模块)发出的CAN信息数据进行采集, 可与手机实时通信, 并可通过3G模块发送至远程服务器. 传输中采用Socket通信建立长连接可以提高数据传输效率[7]. 车载数据传输系统可接收由远程服务器发来的数据, 进行行车记录分析、故障诊断以及对整车控制器执行程序的更新等功能. 采集的数据分结构化和非结构化两种, 服务器端接收过程中同步对数据进行解析、分析, 并将提取到的车辆运行状态信息存储至结构化数据库中; 海量非结构化数据则用于进一步数据挖掘.车载数据采集模块负责新能源车辆运行数据的实时采集, 是系统中的数据来源. 数据采集系统的功能需求决定了数据采集的类型, 进而决定了数据采集模块的结构. 图2给出了系统的功能需求和数据需求. 从图中可以看出本系统主要针对车辆的运行状态监控、故障诊断以及本地化程序升级等功能. 采集的数据主要有两类: 一种是通过两路CAN总线获取的车辆运行实时数据, 另一种是通过车载GPS模块获取的车辆实时位置信息.2.1模块硬件结构本系统数据采集模块选用成熟稳定的基于ARM11架构的三星S3C6410处理器[8]. S3C6410是一款低功率、高性价比、高性能的用于移动电话和通用处理RSIC处理器. 采用64/32bit的内部总线架构, 融合了AXI、AHB、APB总线. 考虑免费、开放源代码、支持多任务、内核稳定、支持多种体系结构的硬件和支持多种文件系统等优点, 系统采用Linux嵌入式操作系统. 兼顾CAN节点的性能和成本, 采用支持SPI接口的Microchip MCP2515独立CAN控制器. 它完全支持CAN V2.0B技术规范, 通信速率最高可达1 Mbps, 内含3个发送缓冲器、2个接收缓冲器、6个29位验收滤波寄存器和2个29位验收屏蔽寄存器. 它的SPI接口时钟频率最高可达40 MHz, 可满足一个SPI主机接口扩展多路CAN总线接口的需要. 无线通信方面, 使用中兴MC2716 3G无线通信模块将采集到的数据实时传输给后端数据中心网关. 整车程序的更新采用两种方式进行: 一种是本地化的程序在线更新, 技术维护人员携带笔记本电脑通过WiFi连接和整车控制器建立通信链路; 另一种是通过数据中心远程进行更新. 图3给出了系统的硬件结构图.2.2软件架构与模块驱动数据采集模块引入嵌入式操作系统后, 与硬件相关的操作都放到驱动程序里面完成, 应用程序仅负责系统功能的实现, 从而使得程序结构清晰, 可移植性强, 便于系统升级和功能扩展. 仅以WiFi模块为例介绍模块移植后的驱动安装与配置. 系统选用SDIO接口的RTL8189芯片, 该芯片是Realtek公司为实现短距离无线通信应用而设计的一款高性能、低成本无线模块, 该模块支持ap/sta两种工作模式.该模块的调试通过如下过程进行, 首先建立编译环境, 需要配置操作系统内核以支持SDIO 设备、WiFi 设备, 以及支持IEEE 802.11 等. 接下来修改驱动程序配置文件Makefile支持相应平台. 编译生成驱动文件8189es.ko后, 通过串口或网络将其拷贝到采集模块开发板中. 通过insmode 命令加载驱动. 加载成功后可以通过ifconfig 命令查看网络设备, 如果看到其中有wlan0 设备则表明成功.3.1数据本地存储系统采集到的数据分为两类: 普通数据和紧急数据. 其中, 紧急数据通过3G/4G无线网络实时传输至数据中心, 并以“C-车号-日期-时间”命名存储到本地TF卡上; 普通数据以“R-车号-日期-时间”命名, 以文件形式存储, 当车辆到达指定地点(如充电站)或满足网络条件时进行上传. 对紧急数据, 如果TF卡没有足够容量, 则通过覆盖普通文件获得存储空间. 对于普通文件, 当文件内容达到TF卡设定的存储容量时, 替换最早的文件.3.2 数据服务器端传输系统数据传输逻辑采用“生产者-消费者”模式完成. 在数据采集模块的TF卡中设置一个配置文件config_C.dat来存储生成的文件名, 每当系统生成一个紧急文件则同步登记到该配置文件中(生产者). 函数get_filenum_configC()用来判断当前待传输文件的个数. 当配置文件不空时采集模块端读取TF卡中配置文件中的第一个文件名, 从而可以获取要上传的文件. 客户端与服务器建立TCP/IP连接后, 文件按照设定的缓冲区大小进行传输, 直至该传文件成功传输至服务器网关. 此时, 通过函数del_fileelem_configC()删除配置文件中相应文件名(消费者), 图5给出了客户端socket文件传输的流程图.注意, 如果当前数据传输因为断电等原因异常中断, 则下次启动断点续传. 如果配置文件空或不存在, 则表明没有待传文件, 系统进入睡眠状态, 一定时间后重新扫描配置文件. 当配置文件中不存在待传文件时, 则向服务器端发送暂时结束标记, 然后客户端关闭socket连接, 释放网络资源. 此外, 在配置文件的生产或消费过程中需要对相关临界变量进行保护, 以避免操作冲突.3.3 服务器端数据接收服务器端接收程序工作逻辑如图6流程图所示. 对应发送端, 数据接收网关创建服务器socket, 绑定地址并监听未连接套接口状态, 判断套接口是否可读, 如果不可读读则延时10s, 重新判断. 当套接口可读, 判断客户连接是否到来, 如果有连接请求, 则建立连接. 服务器端接收缓冲区中来自于客户的待传文件名, 依据文件名执行不同的操作. 如果文件名已存在, 则进行断点续传; 如果不存在, 则创建该文件并接收文件内容. 如果接收到的是客户端发来的结束标志或则客户端关闭, 则当前无文件传输, 则服务器关闭socket, 释放网络资源以更好地支持多客户通信.服务器程序将接收到的文件根据协议规范同步解析后记入关系型数据库中, 通过Web页面或手机App实现运行车辆数据的动态展示, 从而实现对车辆运行状态的监控等应用. 其他数据可保存用于深度数据挖掘与分析, 服务于其他优化应用.采用模拟测试验证车载数据采集模块及数据传输系统的运行效果. 在模拟测试方案中选择CANalyst-II CAN总线分析仪测试数据的收发. 该设备可以被视为一个标准的CAN节点, 在CAN总线产品开发、CAN总线设备测试、数据分析等场景下应用广泛. 试验中可以通过配套软件设置报文发送的波特率、帧格式与类型、帧ID、CAN通道以及数据等. 数据采集终端原型系统与CANalyst-II分析仪的连接如图7所示.数据采集模块上电后, 会依据配置文件对WiFi进行自动配置, 并运行客户端程序, 将数据采集终端设置成TCP 客户端模式, 通过3G拨号建立TCP/IP通信链路进行数据的传输. 设定分析仪的波特率为250kbps, 假定传输的帧类型为数据帧、扩展帧, 数据长度为8字节. CANalyst-II数据发送设定和数据接收如图8和图9所示. 图10给出了对解析写入MySql数据库中内容的Web端呈现. 从图中数据可以看出, 解析后的数据直观地反映了发动机的实时运行数据和运行状态, 从而采集的数据可以作为参数优化和故障故障诊断等应用的依据.针对新能源汽车数据采集和监控应用的实际需求, 给出了一种基于CAN总线的车载数据采集和状态监测系统的设计和实现. 实验表明, 车载模块能够完成整车CAN 网络的数据采集、存储和发送, 性能稳定, 可靠性良好. 服务器端可以成功收集到来自采集模块发送的数据, 经过解析后存入关系型数据库, 服务于车辆监控、参数优化、故障诊断等实际应用.1 任慧君,许涛,李响.利用车载GPS轨迹数据实现公交车驾驶安全性分析.武汉大学学报(信息科学版),2014,39(6): 739–742.2 汪成亮,陈俊宏,张晨.基于车联网的油耗检测及其时空分布研究.计算机工程,2013,39(9):34–38.3 颜伏伍,曹恺,胡杰,杨辰.基于Internet和3G的汽车远程诊断数据采集技术的研究.汽车工程,2013,35(5):467–471.4 潘益斌,张海峰.基于OBD的汽车数据采集及捕获系统设计.杭州电子科技大学学报(自然科学版),2015,35(1):41–44.5 罗峰,孙泽昌.汽车CAN总线系统原理设计与应用.北京:电子工业出版社,2010.6 李俐,谢显中.基于CAN总线的行车记录仪设计.计算机工程与设计,2009,30(22):5120–5123.7 徐克宝,武慧,文艺成.基于Socket的Windows与Linux平台异步通信.计算机系统应用,2015,24(7):232–235.8 郗瑶颖,张建阳,赵祥模,徐志刚.基于ARM11的单目视觉车距监测系统.计算机工程,2012,21(12):33–37.。
新能源智能采集系统的设计与实施方案探讨1. 背景介绍随着全球能源短缺问题日益凸显,新能源的开发和利用已成为全球各国争相探索的重要领域。
为了更好地实现对新能源的智能采集和管理,需要设计并实施一套高效的新能源智能采集系统。
2. 系统架构设计新能源智能采集系统的设计应该包括硬件设备、软件平台和数据传输三个部分。
硬件设备主要包括传感器、数据采集器等;软件平台应该具备数据处理、储存、分析功能;数据传输则需要确保数据的高效实时传输,以实现对新能源的及时监测和控制。
3. 传感器选型在设计新能源智能采集系统时,传感器的选型至关重要。
需要根据不同的新能源类型和采集需求来选择合适的传感器,保证数据的准确性和可靠性。
4. 数据采集器的选择数据采集器是新能源智能采集系统中的核心设备,负责将传感器采集到的数据传输至软件平台进行处理。
在选择数据采集器时,需要考虑其采集频率、传输速度、稳定性等因素。
5. 软件平台开发为了实现对新能源的智能采集和管理,需要开发一套功能强大的软件平台。
该软件平台应该能够实现对数据的实时监测、分析和控制,并具备一定的智能化和自适应性。
6. 数据处理和存储新能源智能采集系统中的数据处理和存储是至关重要的环节。
需要确保数据的准确性和完整性,同时提供高效的数据存储和查询功能,以便后续的分析和应用。
7. 数据分析和挖掘通过对采集到的数据进行分析和挖掘,可以发现新能源的规律和趋势,并为新能源的管理和优化提供科学依据。
因此,数据分析和挖掘功能是新能源智能采集系统的重要组成部分。
8. 控制策略优化在新能源智能采集系统中,控制策略的优化是实现对新能源的有效管理和利用的关键。
通过对数据的分析,可以及时调整控制策略,以提高新能源的利用效率和经济性。
9. 实际应用场景新能源智能采集系统可以广泛应用于风能、太阳能、水能等各种新能源领域。
通过实际的应用场景,可以验证系统的稳定性和可靠性,为新能源的推广和应用提供有力支持。
10. 使用效果评估设计和实施新能源智能采集系统后,需要对系统的使用效果进行评估。
车联网中的智能车辆远程控制与监控系统设计随着信息技术的发展和车辆网络化的普及,智能车辆远程控制与监控系统在车联网中扮演着重要角色。
这种系统不仅可以提供安全的远程控制功能,还可以实时监测车辆的状态、位置和性能。
本文将探讨智能车辆远程控制与监控系统的设计要点和技术实现。
一、远程控制功能的设计智能车辆远程控制是指车主或授权人员可以通过网络远程控制车辆的各项功能,如远程启动、熄火、关闭车窗、开启空调等。
为了实现远程控制功能,系统设计需要考虑以下几个方面:1. 安全性:远程控制系统必须具备高度的安全性保护,以防止未经授权的人员对车辆进行恶意控制。
采用安全加密技术和身份认证机制可以有效防止黑客攻击和非法操作。
2. 实时性:远程控制命令必须能够在短时间内传递给车辆,并立即产生相应的效果。
为了确保实时性,系统设计应采用高速传输网络和低延迟的通信方式。
3. 稳定性:远程控制系统需要保证在各种网络环境下都能正常工作,包括网络延迟、带宽限制、信号干扰等。
系统设计时应考虑采用冗余和容错技术,以提高系统的稳定性和可靠性。
4. 用户友好性:远程控制系统应提供简洁、直观的用户界面,方便用户进行操作。
界面设计应符合用户习惯,操作流程简单明了。
二、车辆状态监控的设计除了远程控制功能,智能车辆远程控制与监控系统还需要能够实时监测车辆的状态、位置和性能。
以下是车辆状态监控功能的设计要点:1. 实时定位:系统应通过GPS或其他定位技术实时获取车辆的位置信息,并将其显示在地图上。
车主可以根据需要随时查看车辆的位置,以防止车辆丢失或被盗。
2. 车辆诊断:系统应能够监测车辆的各项性能指标,如发动机温度、油耗、油压等,并及时报警或提醒车主进行检修。
3. 安全监控:系统应配备摄像头和传感器,以实现车内外环境的实时监控。
车主可以随时查看车辆周围的情况,及时发现异常情况并采取措施。
4. 驾驶行为监测:系统能够监测车辆的驾驶行为,如超速、疲劳驾驶等,并及时提醒车主纠正行为,以确保驾驶安全。
纯电动汽车的车辆管理与监控系统研究随着环境保护意识的提高以及对传统燃油汽车排放污染的担忧,纯电动汽车作为一种清洁、高效的出行方式正在逐渐走入人们的视野。
然而,纯电动汽车相较于传统燃油汽车在车辆管理与监控方面面临着许多新的挑战。
因此,研究纯电动汽车的车辆管理与监控系统变得尤为重要。
一、纯电动汽车的车辆管理系统纯电动汽车的车辆管理系统是指通过对车辆运行状态、行驶数据等进行监控和管理的系统。
该系统旨在提高电动汽车的安全性、稳定性以及车主的使用体验。
1. 远程监控与追踪功能纯电动汽车的车辆管理系统应具备远程监控与追踪功能,通过使用GPS定位技术,可以实时跟踪车辆的位置、行驶路线以及车况信息,并将数据传输至后台管理系统。
这对于车主、车队管理人员以及应急机构来说,都是具有重要意义的。
2. 故障诊断与维护提示纯电动汽车的车辆管理系统应能够对车辆进行故障诊断,并通过云端连接分析系统,及时传递故障信息至用户。
同时,系统还应能提供车辆维护提示,包括电池状态、电机温度等重要参数的监测,以便车主进行相应的维护操作。
3. 充电桩管理针对纯电动汽车的基础设施,如充电桩,车辆管理系统应该能够进行充电桩的管理,包括充电桩的运行状态、使用情况、充电桩定位等信息的监测和追踪,保证纯电动汽车用户的充电效率和体验。
二、纯电动汽车的车辆监控系统纯电动汽车的车辆监控系统是指对纯电动汽车进行远程监控和统计,以实现车辆运行情况的掌握和分析。
该系统对保障纯电动汽车的安全、优化行驶效率具有重要作用。
1. 行驶能耗监控与评估纯电动汽车的车辆监控系统可以实时监测、记录车辆的能耗情况,包括续航里程、能耗曲线等数据,并通过数据分析和模型评估,为车主提供针对性的驾驶建议,帮助车主优化能源利用和提升行驶效率。
2. 行驶数据统计与分析纯电动汽车的车辆监控系统可以对行驶数据进行统计与分析,包括里程数、行驶时间、速度分布等。
这些数据的收集和分析有助于制定行车计划、提升安全性、优化车辆调度,并为车主提供个性化的驾驶建议。
新能源纯电动汽车远程监控系统介绍一、远程监控系统是什么?远程监控系统是车载记录设备(称为车载远程监控终端)将车辆的定位信息、CAN总线信息和故障信息,通过GPRS/3G无线网络,发送到远程监控中心的数据服务器,并最终可通过页面展示给工程、售后人员的系统。
新能源远程终端工作示意图二、远程监控系统包含什么?1、车载终端:新能源车载终端安装在车上的信息采集设备,集成卫星定位、CAN总线(故障)监控、移动网络接入和本地数据存储功能。
是远程监控系统的数据来源,要求数据采集齐全,并能有效适应电动汽车恶劣的应用环境;2、数据服务器:新能源监控服务器数据服务器是远程监控系统的核心部分,负责与车载终端的数据收发、数据管理&存储等功能的实现。
要求可并发处理大量的连接请求(即同时接入的终端要多),且能高效的对数据进行管理、存储和推送;3、监控页面:新能源监控显示页面监控页面直接面向用户的交互界面,将数据服务器推送来的数据整理、显示给用户。
用户也可通过监控页面对数据服务器、乃至车载终端进行操控。
三、远程监控系统有什么用?1、工程技术人员:积累车辆运行的真实数据,为后续产品优化、评审零部件供应商提供数据支持;2、售后人员:第一时间收到车辆故障报警,获取车辆故障前后的运行状态信息,实现远程检修、售后服务;3、物流车客户:提供远程、实时查询旗下车辆运营状况的能力。
进一步的,未来可提供相关运营统计报告,以协助物流公司提高车辆使用效率;4、集团公司:为集团公司年报提供数据依据,并可作为新能源车推广和节能减排成果的原始数据。
四、车载终端的主要性能指标1、对外接口:CAN总线接口×3;12V车载电源接口×1;2、数据上报周期:实时数据包/10s;故障数据包/1s;3、工作温度:工业级,-40~70℃;4、定位精度:水平误差<2.5m(静态)/<10m(动态);速度误差<0.1m/s;5、抗震性能:通过GB/T28046.2-2011中规定的震动测试,测试时采用的分类标准为“商用车驾驶室”;6、电磁兼容性能:1)、辐射抗扰,符合GB/T17619-1998;2)、传导抗扰,符合GB/T21437.2-2008;3)、电磁骚扰,符合GB/T18655-2010。
基于物联网的智能车辆监测与诊断系统设计随着物联网技术的日益成熟和普及,智能交通系统逐渐成为现代城市发展的必然趋势。
在智能交通系统中,智能车辆监测与诊断系统作为关键组成部分,可以实现对车辆的实时监测和故障诊断,以提高道路交通的安全性、效率和可靠性。
一、系统概述基于物联网的智能车辆监测与诊断系统是以车辆为基本单元,通过传感器和无线通信技术将车辆的实时数据获取和监测,实现对车辆的故障诊断和安全监控的系统。
系统主要包括车辆数据采集模块、数据传输模块、数据处理与分析模块和故障诊断与安全监控模块。
1. 车辆数据采集模块:通过安装在车辆上的传感器和探测器,实时采集车辆的各类数据,包括车辆状态、行驶路况、发动机参数等。
传感器的选择和安装位置应根据车辆类型和需求进行优化,以确保数据采集的准确性和全面性。
2. 数据传输模块:采用无线通信技术,将车辆采集到的数据传输到远程监测与诊断中心。
常用的通信技术包括2G/3G/4G网络、Wi-Fi和Bluetooth 等。
选择合适的通信方式,要根据车辆使用场景和网络覆盖情况进行综合考虑。
3. 数据处理与分析模块:在远程监测与诊断中心,对接收到的车辆数据进行处理、分析和存储。
可以利用数据挖掘和机器学习技术,提取车辆数据中的关键信息,预测车辆故障和异常情况,并生成相应的报警信息。
4. 故障诊断与安全监控模块:该模块通过与车辆电子控制单元(ECU)进行交互,实现对车辆故障的诊断和监控。
当系统检测到车辆存在故障或安全隐患时,及时通过警报、短信或邮件等方式通知车主或相关部门,以便采取相应的措施。
二、关键技术和挑战1. 传感器技术:选择合适的传感器,并根据不同的应用场景和需求进行布置和校准。
传感器的质量和准确性对系统的性能和可靠性起到重要作用。
2. 无线通信技术:选择合适的通信方式和协议,以确保车辆数据的可靠传输和实时性。
同时要考虑通信安全和隐私保护的问题,防止数据泄露和攻击。
3. 数据处理和分析技术:利用大数据和人工智能技术,处理海量的车辆数据,提取有用的信息,并进行故障诊断和预测。
基于Web技术的车辆远程监控与控制系统设计随着科技的不断发展,车辆远程监控与控制系统在现代交通管理中扮演着越来越重要的角色。
基于Web技术的车辆远程监控与控制系统设计,可以实现对车辆的实时监测、报警处理和远程控制,提高车辆的安全性和管理效率。
一、概述基于Web技术的车辆远程监控与控制系统设计是一种利用网络技术实现对车辆状态的远程监控和控制的系统。
该系统通过连接车载设备和云服务器,将车辆的位置、速度、行驶轨迹等信息实时传输到云端,然后通过Web界面实现对车辆的远程监控和控制。
二、系统设计1. 系统架构基于Web技术的车辆远程监控与控制系统主要由车载设备、云服务器和Web界面三部分组成。
车载设备负责收集车辆的相关信息,包括位置、速度、行驶状态等。
该设备通过GPS、传感器等技术实时采集数据,并将数据传输至云服务器。
云服务器是系统的核心部分,接收来自车载设备的数据并进行处理和存储。
同时,云服务器还负责相关算法的运行和数据分析,并将处理结果通过Web界面呈现给用户。
Web界面是用户与系统交互的界面,通过Web浏览器即可访问。
用户可以通过Web界面实时查看车辆的位置、速度等信息,并对车辆进行远程控制,如锁车、开启警示灯等。
2. 功能设计基于Web技术的车辆远程监控与控制系统设计包括以下核心功能:(1) 车辆定位与追踪:通过GPS等定位技术,实时获取车辆的位置信息,并在地图上进行显示。
用户可以通过Web界面追踪车辆的行驶轨迹,了解车辆的实时位置。
(2) 实时监测与报警:系统可以实时监测车辆的速度、里程等数据,并通过算法进行分析。
一旦发现异常情况,如超速、碰撞等,系统会发出警报并发送报警信息给用户。
(3) 远程控制:用户可以通过Web界面对车辆进行远程控制,如锁车、解锁、开启警示灯等。
这种远程控制的方式能够方便用户进行车辆管理和操作。
(4) 数据分析与统计:系统可以对车辆的历史数据进行分析和统计,如行驶里程、油耗等,帮助用户了解车辆的使用情况。
2012年7月9日,国务院正式发布《节能与新能源汽车产业发展规划》,规划对未来新能源汽车产业化销量目标做了具体要求:到2015年,纯电动汽车和插电式混合动力汽车累计产销量力争达到50万辆;到2020年,纯电动汽车和插电式混合动力汽车生产能力达200万辆、累计产销量超过500万辆。
为进一步提高新能源汽车产业技术创新能力,加快产业化进程,2012年9月,财政部、工业和信息化部、科技部组织实施了新能源汽车产业技术创新工程,安排专项奖励资金重点支持全新设计开发的新能源汽车车型及动力电池等关键零部件项目。
创新工程项目要求,所有新能源车辆必须加装远程信息诊断系统进行车辆安全状态的监控[1]。
1工作原理与组成架构1.1工作原理新能源汽车远程监控系统主要用于车辆远程监控、车辆管理、远程诊断及故障管理,车辆电池、电机、电控系统数据采集及数据分析。
具体功能包括车辆定位、行驶状态监控、历史轨迹回放、ECU 数据监控、远程故障诊断、数据统计与分析、条件设定与报警等。
上述功能的实现及监控系统平台的工作原理与GPS 定位技术、GPRS 数据传输技术、CAN 总线数据采集分析技术的发展密不可分。
首先需要在新能源车辆上安装一个具备GPS 模块、GPRS 模块和CAN 总线模块的车载智能信息终端,其硬件架构如图1所示。
车载终端通过CAN 总线接口与车辆的CAN 总线网络建立连接,负责采集新能源车辆的电机、电池和电控系统的相关数据,车载终端的内置网关按照标准的协议转换机制将数据通过GPRS 网络上传到Internet 网络服务器,同时GPS 模块上传车辆的位置信息[2]。
管理人员通过访问Internet修改稿收稿日期:2013-11-04作者简介:赵佳(1983-),男,工程师,主要研究方向为新能源汽车电器总布置设计、CAN 总线控制技术和远程监控系统平台设计。
新能源汽车远程监控系统平台的设计与搭建赵佳1,赵浩2,王力1,刘清波1(1.中通客车控股股份有限公司,山东聊城252000;2.潍坊学院,山东潍坊261061)摘要:根据新能源汽车创新工程项目要求,设计搭建一个专门用于远程监控新能源车辆安全运行状态的系统平台。
新能源汽车实时监控与数据采集系统开发随着全球对环境保护意识的不断提高,新能源汽车的市场需求也越来越大。
为了保证新能源汽车的运行安全和性能稳定,开发一套实时监控与数据采集系统是非常必要的。
1. 远程监控模块:通过互联网将新能源汽车与监控中心进行连接,实时监测车辆的位置、车速、电池电量等信息。
监控中心可以及时掌握车辆的运行状态,对异常情况进行预警和处理。
2. 数据采集模块:通过传感器等设备将新能源汽车的各种数据进行采集,包括车速、电池电量、发动机温度等。
这些数据可以帮助用户了解车辆的性能以及状况,并在必要时进行调整和维修。
3. 数据存储模块:将采集的数据进行存储并进行整理和分类,便于后续的分析和使用。
可以将数据存储在云服务器上,方便用户随时随地进行查看和管理。
4. 数据分析模块:对采集到的数据进行分析和处理,提取关键指标和规律。
通过数据分析,可以及时发现问题并进行优化和改进,提高车辆的运行效率和性能。
5. 报警处理模块:当监控系统发现车辆出现故障或异常情况时,可以及时发送报警信息给用户或监控中心,以便及时采取措施,保证车辆的安全。
6. 用户界面模块:为用户提供一个直观、方便的界面,可以通过手机、电脑等设备进行操作和查看车辆信息。
用户可以随时随地监控自己的车辆状态,并进行相关设置和操作。
1. 数据的准确性和实时性:由于新能源汽车的复杂性和特殊性,准确采集和传输车辆数据是非常重要的,确保监控系统对车辆状态的掌握是准确和实时的。
2. 网络安全性:由于新能源汽车与互联网进行连接,系统需要具备一定的安全性,防止黑客攻击和信息泄露,保护用户和车辆的隐私和安全。
3. 数据存储和处理能力:新能源汽车的数据量较大,系统需要有足够的存储和处理能力,保证大量数据的高效管理和分析。
4. 界面友好性:用户界面需要简洁明了,方便用户进行操作和查看车辆信息,可以根据用户的需求进行定制和调整。