数控机床进给传动系统
- 格式:doc
- 大小:448.50 KB
- 文档页数:14
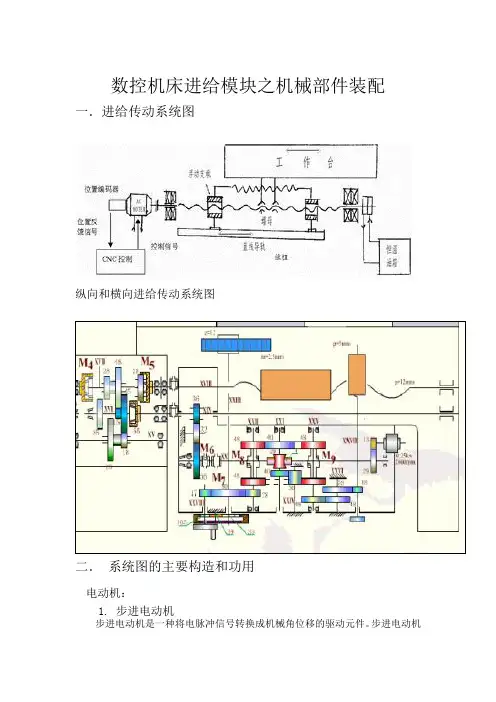
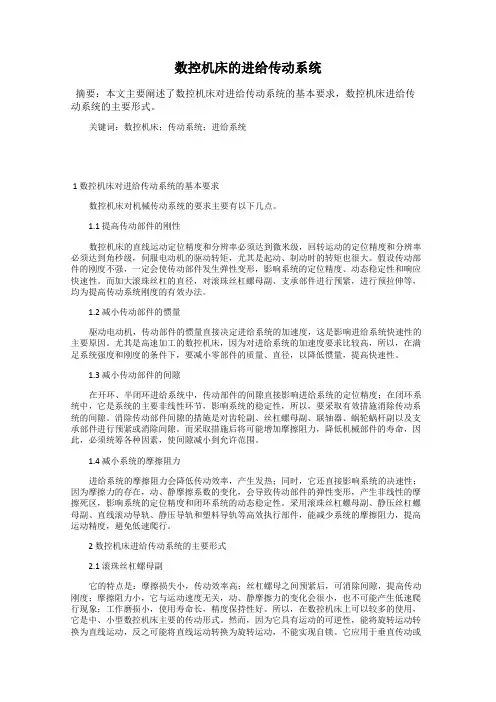
数控机床进给模块之机械部件装配一.进给传动系统图纵向和横向进给传动系统图二.系统图的主要构造和功用电动机:1. 步进电动机步进电动机是一种将电脉冲信号转换成机械角位移的驱动元件。
步进电动机是一种特殊的电动机,一般电动机通电后都是连续转动的,而步进电动机则有定位与运转两种状态。
当有一个电脉冲输入时,步进电动机就回转一个固定的角度,这角度称为步距角,一个步距角就是一步,所以这种电动机称为步进电动机。
又由于它输入的是脉冲电流,也称作脉冲电动机。
当电脉冲连续不断地输入,步进电动机便跟随脉冲一步一步地转动,步进电动机的角位移量和输入的脉冲个数严格成正比例,在时间上与输入脉冲同步。
因此,只需控制输入脉冲的数量、频率及电动机绕组的通电顺序,便可获得所需转角、转速和方向。
在无脉冲输入时,步进电动机的转子保持原有位置,处于定位状态。
步进电动机的调速范围广、惯量小、灵敏度高、输出转角能够控制,而且有一定的精度,常用作开环进给伺服系统的驱动元件。
与闭坏系统相比,它没有位置速度反馈回路,控制系统简单,成本大大降低,与机床配接容易,使用方便,因而在对精度、速度要求不十分高的中小型数控机床上得到了广泛地应用。
2. 直流伺服电动机由于数控机床对进给伺服驱动装置的要求较高,而直流电动机具有良好的调速特性,因此在半闭坏、闭坏伺服控制系统中,得到较广泛地使用。
直流进给伺服电动机就其工作原理来说,虽然与普通直流电动机相同。
然而,由于机械加工的特殊要求,一般的直流电动机是不能满足需要的。
首先,一般直流电动机转子的转动惯量过大,而其输出转矩则相对较小。
这样,它的动态特性就比较差,尤其在低速运转条件下,这个缺点就更突出。
在进给伺服机构中使用的是经过改进结构,提高其特性的大功率直流伺服电动机,主要有以下两种类型:(1)小惯量直流电动机。
主要结构特点是其转子的转动惯量尽可能小,因此在结构上与普通电动机的最大不同是转子做成细长形且光滑无槽。
以此表现为转子的转动惯量小,仅为普通直流电动机的1/10左右。
数控机床的进给传动系统摘要:本文主要阐述了数控机床对进给传动系统的基本要求,数控机床进给传动系统的主要形式。
关键词:数控机床;传动系统;进给系统1 数控机床对进给传动系统的基本要求数控机床对机械传动系统的要求主要有以下几点。
1.1 提高传动部件的刚性数控机床的直线运动定位精度和分辨率必须达到微米级,回转运动的定位精度和分辨率必须达到角秒级,伺服电动机的驱动转矩,尤其是起动、制动时的转矩也很大。
假设传动部件的刚度不强,一定会使传动部件发生弹性变形,影响系统的定位精度、动态稳定性和响应快速性。
而加大滚珠丝杠的直径,对滚珠丝杠螺母副、支承部件进行预紧,进行预拉伸等,均为提高传动系统刚度的有效办法。
1.2 减小传动部件的惯量驱动电动机,传动部件的惯量直接决定进给系统的加速度,这是影响进给系统快速性的主要原因。
尤其是高速加工的数控机床,因为对进给系统的加速度要求比较高,所以,在满足系统强度和刚度的条件下,要减小零部件的质量、直径,以降低惯量,提高快速性。
1.3 减小传动部件的间隙在开环、半闭环进给系统中,传动部件的间隙直接影响进给系统的定位精度;在闭环系统中,它是系统的主要非线性环节,影响系统的稳定性,所以,要采取有效措施消除传动系统的间隙。
消除传动部件间隙的措施是对齿轮副、丝杠螺母副、联轴器、蜗轮蜗杆副以及支承部件进行预紧或消除间隙。
而采取措施后将可能增加摩擦阻力,降低机械部件的寿命,因此,必须统筹各种因素,使间隙减小到允许范围。
1.4 减小系统的摩擦阻力进给系统的摩擦阻力会降低传动效率,产生发热;同时,它还直接影响系统的决速性;因为摩擦力的存在,动、静摩擦系数的变化,会导致传动部件的弹性变形,产生非线性的摩擦死区,影响系统的定位精度和闭环系统的动态稳定性。
采用滚珠丝杠螺母副、静压丝杠螺母副、直线滚动导轨、静压导轨和塑料导轨等高效执行部件,能减少系统的摩擦阻力,提高运动精度,避免低速爬行。
2 数控机床进给传动系统的主要形式2.1 滚珠丝杠螺母副它的特点是:摩擦损失小,传动效率高;丝杠螺母之间预紧后,可消除间隙,提高传动刚度;摩擦阻力小,它与运动速度无关,动、静摩擦力的变化会很小,也不可能产生低速爬行现象;工作磨损小,使用寿命长,精度保持性好。

数控机床进给传动系统数控机床是以数字化控制系统为基础的高精度、高效率、高自动化的数控设备。
其进给传动系统作为数控机床中最重要的组成部分之一,其性能将会直接影响机床的加工效率和加工质量。
本文将介绍数控机床进给传动系统的构成、工作原理、传动方式、技术要求和发展趋势等方面。
一、进给传动系统的构成数控机床进给传动系统是由电机、减速箱、传动装置和运动控制系统等组成的。
电机作为驱动设备,通过减速箱将高速低扭矩的电机转换成低速大扭矩的动力,传动装置则将动力传递到物料上,最终由运动控制系统控制数控机床的运动状态。
二、进给传动系统的工作原理进给传动系统的工作原理是通过电机的驱动下,通过减速箱将高速低扭矩的动力转变为低速大扭矩的动力输出,经过传动装置传递给物料上,再由运动控制系统进行控制。
其中,进给传动系统的工作精度和稳定性将会直接影响机床的加工精度和稳定性。
三、进给传动系统的传动方式数控机床的进给传动方式主要有液压、机械式和电子式三种。
其中,液压进给传动系统适用于高功率、高切削力和大型工件的传动,具备很好的稳定性和适应性;机械式进给传动系统适用于中等功率、中等切削力和中等体积工件的传动,具备可靠性和速度调整灵活度;电子式进给传动系统适用于高精度、高速传动,具备精度高、稳定性好、速度范围大等优点。
四、技术要求数控机床进给传动系统的技术要求主要包括传动精度和传动稳定性。
传动精度是指传动装置的转速精度、位置精度、运动精度和位置控制精度等因素;传动稳定性是指传动装置的噪声、振动、温度稳定性和电磁兼容性等因素。
为保证数控机床的精度和稳定性,对于进给传动系统的要求不仅在传动装置上,还需要考虑到运动控制系统的精度和稳定性。
在传动装置方面,还需考虑到其寿命和安全性等因素。
五、发展趋势随着数控技术的不断发展和应用,数控机床的进给传动系统也在不断革新和升级。
从原来的液压和机械式进给传动方式不断升级发展到电子式进给传动系统,近年来更是向智能化、集成化发展。
数控机床进给传动系统一.进给传动体系图纵向和横向进给传动体系图二.体系图的重要构造和功用电念头:1. 步进电念头步进电念头是一种将电脉冲旌旗灯号转换成机械角位移的驱动元件。
步进电念头是一种特别的电念头,一般电念头通电后都是持续迁移转变的,而步进电念头则有定位与运转两种状况。
当有一个电脉冲输入时,步进电念头就反转展转一个固定的角度,这角度称为步距角,一个步距角就是一步,所以这种电念头称为步进电念头。
又因为它输入的是脉冲电流,也称作脉冲电念头。
当电脉冲持续赓续地输入,步进电念头便跟随脉冲一步一步地迁移转变,步进电念头的角位移量和输入的脉冲个数严格成正比例,在时光上与输入脉冲同步。
是以,只需控制输入脉冲的数量、频率及电念头绕组的通电次序,便可获得所需转角、转速和偏向。
在无脉冲输入时,步进电念头的转子保持原有地位,处于定位状况。
步进电念头的调速范围广、惯量小、灵敏度高、输出转角可以或许控制,并且有必定的精度,常用作开环进给伺服体系的驱动元件。
与闭坏体系比拟,它没有地位速度反馈回路,控制体系简单,成本大年夜大年夜降低,与机床配接轻易,应用便利,因而在对精度、速度请求不十分高的中小型数控机床上获得了广泛地应用。
2. 直流伺服电念头因为数控机床对进给伺服驱动装配的请求较高,而直流电念头具有优胜的调速特点,是以在半闭坏、闭坏伺服控制体系中,获得较广泛地应用。
直流进给伺服电念头就其工作道理来说,固然与通俗直流电念头雷同。
然而,因为机械加工的特别请求,一般的直流电念头是不克不及知足须要的。
起首,一般直流电念头转子的迁移转变惯量过大年夜,而其输出转矩则相对较小。
如许,它的动态特点就比较差,尤其在低速运转前提下,这个缺点就更凸起。
在进给伺服机构中应用的是经由改进构造,进步其特点的大年夜功率直流伺服电念头,重要有以下两种类型:(1)小惯量直流电念头。
重要构造特点是其转子的迁移转变惯量尽可能小,是以在构造上与通俗电念头的最大年夜不合是转子做成细长形且滑腻无槽。
以此表示为转子的迁移转变惯量小,仅为通俗直流电念头的1/10阁下。
是以,响应特别快,机电时光常数可以小于10 ms,与通俗直流电念头比拟,转矩与惯量之比要大年夜出40~50倍。
且调速范围大年夜,运转安稳,实用于频繁起动与制动,请求有快速响应(如数控钻床、冲床等点定位)的场合。
但因为其过载才能低,并且电念头的自身惯量比机床响应活动部件的惯量小,是以应用时都要经由一对中心齿轮副,才能与丝杠相连接,在某些场合也限制了它广泛地应用。
(2)大年夜惯量直流电念头。
又称宽调速直流电念头,是在小惯量电念头的基本上成长起来的。
在构造上和惯例的直流电念头类似,其工作道理雷同。
当电枢线圈经由过程直流电流时,就会在定子磁场的感化下,产生带动负载扭转的电转矩。
小惯量电念头是从减小电念头迁移转变转量来进步电念头的快速性,而大年夜惯量电念头则是在保持一般直流电念头迁移转变惯量的前提下,尽量进步转矩的办法来改良其动态特点。
它既具有一般直流电念头便于调速、机械特点较好的长处,又具有小惯量直流电念头的快速响应机能。
是以,可归纳为以下特点: 1)转子惯量大年夜。
这种电念头的转子具有较大年夜的惯量,轻易与机床匹配。
可以和机床的进给丝杠直接连接,省掉落了减速机构,故可使机床构造简单,即避免了齿轮等传念头构产生的噪声和振动,又进步了加工精度。
2)低速机能好。
这种电念头低速时输出转矩大年夜,能知够数控机床经常在低速进给时进给量大年夜、转矩输出大年夜的特点,如能在1 r/min甚至0.1 r/min下安稳运转。
3)过载才能强、动态响应好。
因为大年夜惯量直流电念头的转子有槽,热容量大年夜,同时采取了冷却办法后,进步了散热才能。
是以可以过载运行30分钟。
别的,电念头的定子采取矫顽力很高的铁氧体永磁材料,可使电念头过载10倍而不会去磁,这就明显地进步了电念头的刹时加快力矩,改良了动态响应,加减速特点好。
4)调速范围宽。
这种电念头机械特点和调速特点的线性度好,所以调速范围宽而运转安稳。
一般调速范围可达1∶10000以上。
大年夜惯量直流电念头尽管有上述长处,但仍有不如其它驱动元件的处所,如运行调剂不如步进电念头简便;快速响应机能不如小惯量电念头。
这种驱动体系可直接接有高精度检测元件,如一些测量转速和转角等检测元件,实现半闭坏、闭环伺服体系的准肯定位。
3. 交换伺服电念头尽管直流伺服电念头具有优良的调速机能,但直流电念头存在着弗成避免的缺点:它的电刷和换向器易磨损,需经常保护;别的换向时易产生火花,使电机的最高转速受到限制,也使应用情况受到限制。
并且,直流电念头构造复杂,制造成本高。
跟着大年夜范围集成电路、计算机控制技巧及现代控制理论的成长与应用,80年代交换伺服驱动技巧取得了冲破性地进展,使得交换伺服电念头具备了调速范围宽、稳速、精度高、动态响应快以及其它优胜的技巧机能。
交换电念头转子惯量较直流电念头小,动态响应更好,在一般同样体积下,交换电念头的输出功率可比直流电念头进步10%~70%,是以交换电念头可选得大年夜一些,以达到更高的电压与转速。
交换伺服电念头采取了全封闭无刷构造,不须要按期检查与维修定子,省去了锻造件壳体,比直流电念头在外形尺寸上削减了50%,重量减轻近60%,转子惯量减至20%。
定子铁芯较一般电念头开槽多且深,绝缘靠得住,磁场平均。
还可对定子铁芯直接冷却,散热后果好。
因而传给机械部分的热量少,进步了全部体系的靠得住性。
转子采取具有周详磁极外形的永远磁铁,可获得高的转矩/惯量比。
是以交换伺服电念头可获得比直流伺服电念头更硬的机械机能和宽的调速范围,交换伺服以其高的机能、大年夜容量获得了广泛地应用。
交换伺服电念头进步机能的关键在于解决对交换电念头的调速控制与驱动。
对交换伺服电念头的调速,今朝用得较多的是计算机对交换电念头磁场作矢量变换控制,其基来源基本理是把交换电念优等效为直流电念头,从而使交换电念头像直流电念头一样进行有效地控制。
数控进给传动构造:在数控机床进给驱动体系中常用的机械传动装配重要有:滚珠丝杠螺母副、静压蜗杆-蜗母条、预加载荷双齿轮-齿条及双导程蜗杆等。
1. 滚珠丝杠螺母副传动为了进步数控机床进给体系的快速响应机能和活动精度,必须削减活动件的摩擦阻力和动静摩擦力之差。
为此,在中小型数控机床中,滚珠丝杠螺母副是采取最广泛的构造。
(1)滚珠丝杠副的工作道理。
滚珠丝杠副是反转展转活动与直线活动互相转换的新型传动装配,是在丝杠和螺母之间以滚珠为滚动体的螺旋传动元件。
其构造道理示意如图,图中丝杠和螺母上都加工有弧形螺旋槽,将它们套装在一路时,这两个圆弧形的螺旋槽对合起来就形成了螺旋滚道,并在滚道内装满滚珠。
当丝杠相对于螺母扭转时,滚珠则既自转又沿着滚道流动。
为了防止滚珠从螺母中滚出来,在螺母的滚道两端用返回装配(又称回珠器)连接起来,使滚珠滚动数圈后分开滚道,经由过程返回装配返回其进口持续参加工作,如斯来去轮回滚动。
(2)滚珠丝杠副的特点。
由以上滚珠丝杠螺母副传动的工作过程,可以明显看出滚动丝杠副的丝杠与螺母之间是经由过程滚珠来传递活动的,使之成为滚动摩擦,这是滚珠丝杠差别于通俗滑动丝杠的关键地点,其特点重要有以下几点:1)传动效力高。
滚珠丝杠副的传动效力高达95%~98%,是通俗梯形丝杠的3~4倍,功率消费削减2/3~3/4.2)灵敏度高、传动安稳。
因为是滚动摩擦,动静摩擦系数相差极小。
是以低速不易爬行,高速传动安稳。
3)定位精度高、传动刚度高。
用多种办法可以清除丝杠螺母的轴向间隙,使反向无空行程,定位精度高,恰当预紧后,还可以进步轴向刚度。
4)不克不及自锁、有可逆性。
即能将扭转活动转换成直线活动,也能将直线活动转换成扭转活动。
是以丝杠在垂直状况应用时,应增长制动装配或均衡块。
5)制造成本高。
滚珠丝杠和螺母等元件的加工精度及外面粗拙度等请求高,制造工艺较复杂,成本高。
(3)滚珠丝杠副的轮回方法。
常用的轮回方法有两种:滚珠在轮回反向过程中,与丝杠滚道离开接触的称为外轮回;而在全部轮回过程中,滚珠始终与丝杠各外面保持接触的称为内轮回。
外轮回回流方法内轮回回流方法1)、外轮回外轮回是滚珠在轮回过程停止后经由过程螺母外表的螺旋槽或插管返回丝杠螺母间从新进入轮回。
如图3-7所示,外轮回滚珠丝杠螺母副按滚珠轮回时的返回方法重要有端盖式、插管埋入式、插管凸起式和螺旋槽式。
如图3-7(a)所示为端盖式。
在螺母末尾加工出以纵向孔,作为滚珠的回程管道,螺母两端的盖板上开有滚珠的回程口,滚珠由此进入回程管,形成轮回。
如图3-7(b)所示为插管式。
它用弯管作为返回管道,在螺母外圆上装有螺旋形的插管口,其两端接入滚珠螺母工作始末两端孔中,以引导滚珠经由过程插管,形成滚珠的多圈轮回链。
这种情势构造简单,工艺性好,承载才能较高,但径向尺寸较大年夜。
今朝应用最为广泛,也可用于重载传动体系中。
如图3-7(c)所示为螺旋槽式。
它在螺母的外圆上铣出螺旋槽,槽的两端钻出通孔并与螺纹管道相切,形成返回通道,这种构造径向尺寸较小,但制造较复杂。
2)、内轮回如图3-8所示为内轮回滚珠丝杠。
内轮回均采取反向器实现滚珠轮回,它靠螺母上安装的反向器接通相邻两滚道,形成一个闭合的轮回回路,使滚珠成单圈轮回。
反向器2的数量与滚珠圈数相等,一般有2—4个,且沿圆周等疏分布。
这种类型的构造紧凑,刚度好,滚珠流畅性好,摩擦损掉小效力高;实用于高灵敏、高精度的进给体系,不宜用于重载传动,且制造较艰苦。
反向器有两种类型:圆柱凸键反向器和扁圆镶块反向器。
如图3-8(a)所示为圆柱凸键反向器,他的圆柱部分嵌入螺母内,端部开有反向槽。
反向槽靠圆柱外圆面及其上端的圆键定位,以包管对准螺纹滚道偏向。
如图3-8(b)所示为扁圆镶块反向器,反向器为一般圆头平键形镶块,镶块嵌入螺母的切槽中,其端部开有反向槽,用镶块的外轮廓定位。
两种反向器比较,后者尺寸较小,从而减小了螺母的径向尺寸及缩短了轴向尺寸。
但这种反向器的外轮廓和螺母上的切槽尺寸精度请求较高。
滚珠丝杠的螺旋滚道型面螺旋滚道型面(即滚道法向截形)的外形有多种,常见的截形有单圆弧型面和双圆弧型面两种。
如图3-9所示为螺旋滚道型面的简图,图中钢球与滚道外面在接触点处的公法线与螺纹轴线的垂线间的夹角称为接触角α,幻想接触角α=45°。
•(4)滚珠丝杠副轴向间隙调剂和预紧办法滚珠丝杠副的轴向间隙,是指负载时滚珠与滚道型面接触的弹性变形所引起的螺母位移量和螺母原有间隙的总和,它直接影响其传动刚度和精度。
(5)滚珠丝杠副的应用防护。
滚珠丝杠副和其它滚动摩擦的传动元件一样,如有硬质的尘土或切屑等脏物落进滚道,就会妨碍滚珠的运转并加快磨损,是以有效地防护密封和保持润滑油的干净就显得十分须要。