二维约束平差
- 格式:docx
- 大小:13.48 KB
- 文档页数:3

二维约束平差不合格英文回答:The problem of two-dimensional constraint adjustment being unacceptable can occur due to various reasons. In order to address this issue, it is important to first understand the concept of constraint adjustment and its significance in surveying and geodesy.Constraint adjustment is a method used in geodetic surveying to determine the most probable values of unknown parameters by minimizing the discrepancies between observed and computed values. It involves incorporating different types of constraints, such as distance, angle, and coordinate constraints, into a mathematical model to obtain a more accurate solution.When a two-dimensional constraint adjustment is deemed unacceptable, it means that the observed and computed values do not meet the required level of accuracy orprecision. This can be caused by several factors, including measurement errors, systematic errors, improper data selection, or inadequate mathematical modeling.To address this issue, several steps can be taken. Firstly, it is important to carefully examine the data used in the adjustment process. This includes verifying the accuracy of measurements, checking for any outliers or gross errors, and ensuring that the data is representative of the actual survey conditions.Secondly, the mathematical model used for the adjustment should be thoroughly reviewed. This involves checking the validity of the assumptions made, assessing the appropriateness of the mathematical equations used, and considering alternative models if necessary.If measurement errors or systematic errors are identified, appropriate corrections should be applied to the data before performing the adjustment. This can involve applying error propagation techniques or using calibration data to improve the accuracy of measurements.Furthermore, it is important to consider the quality of control points used in the adjustment. Control points play a crucial role in constraint adjustment, and their accuracy and reliability can significantly impact the final results. Therefore, it is necessary to carefully select control points that are well-distributed and have known coordinates with high accuracy.In summary, the problem of two-dimensional constraint adjustment being unacceptable can be addressed by carefully examining the data, reviewing the mathematical model, applying appropriate corrections, and ensuring the quality of control points. By taking these steps, it is possible to improve the accuracy and precision of the adjustment results.中文回答:二维约束平差不合格的问题可能由多种原因引起。

⼆维约束平差3 ⼆维约束平差现在可以进⾏⼆维束平差,需要做:1、平差坐标系改为项⽬的坐标系。
2、平差3、固定(或约束)在⽹中使⽤的控制点,以便进⾏必要的转换。
这些控制点通常是能长久保存、⾼精度的平⾯或⾼程点。
更多内容,参见Help(帮助)。
3.1坐标系统的改变我们知道GPS是采⽤的WGS84坐标系统,必须经过投影转换后才能转变为我们的坐标系统,通常我们的坐标系统是克⽒椭球⾼斯投影的平⾯坐标,或独⽴坐标系统.本样例数据为美国坐标系,如何转换为⾼斯坐标或独⽴坐标,我们会在以后的章节着重介绍,先介绍样板数据平差的流程,本例采⽤NAD1983坐标系,在主菜单中选择adjustment/datum/project datum NAD 1983,就完成了WGS84到投影坐标的转换3.2平差选中竖条快捷键adjustment/adjust 进⾏平差(可重复多次),检查平差是否完成可查阅查⽹平差报告中coordinate delta,步骤如下:1.选竖条快捷键adjustment/adjustment report2.报告中,点位Δ值表⽰平差过程中,上次迭代平差与最后⼀次迭代平差的点位改正值,该值表征平差是否完成,只有所有点位改正值全部为零,本次平差次完成.3.3固定(或约束)在⽹中使⽤的控制点选中竖条快捷键adjustment/points,屏幕显⽰如下:GPS Site CalibrationGPS Site Calibration是求的WGS-84坐标系统与地⽅坐标系统之间的关系。
这包括⽔平与垂直的平移和旋转。
这需要3个以上的平⾯已知点和4个以上的⽔准点。
1、在WGS-84平差通过后在adjustment 中选取GPS Site Calibration save2、n ew GPS position 击OK3、在adjustment中选datum 选取⾃⼰定义的平⾯坐标系统,平差通过后4、在survey中选Site Calibration弹出⼀对话框√上Horizontal adjustment 与Vertical adjustment击point list 钮显⽰输⼊对应的GPS点和对应的已知点,击insert钮击Close钮击Compute钮击save as site钮输出report 有坐标改正量和各点的GPS坐标和Calibration 后的坐标(即⾃定义的坐标。
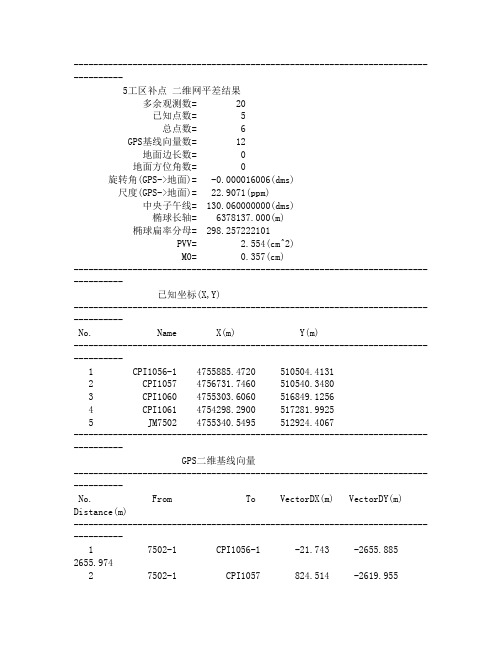
----------------------------------------------------------------------------------5工区补点二维网平差结果多余观测数= 20已知点数= 5总点数= 6GPS基线向量数= 12地面边长数= 0地面方位角数= 0旋转角(GPS->地面)= -0.000016006(dms)尺度(GPS->地面)= 22.9071(ppm)中央子午线= 130.060000000(dms)椭球长轴= 6378137.000(m)椭球扁率分母= 298.257222101PVV= 2.554(cm^2)M0= 0.357(cm)----------------------------------------------------------------------------------已知坐标(X,Y)----------------------------------------------------------------------------------No. Name X(m) Y(m)----------------------------------------------------------------------------------1 CPI1056-1 4755885.4720 510504.41312 CPI1057 4756731.7460 510540.34803 CPI1060 4755303.6060 516849.12564 CPI1061 4754298.2900 517281.99255 JM7502 4755340.5495 512924.4067----------------------------------------------------------------------------------GPS二维基线向量----------------------------------------------------------------------------------No. From To VectorDX(m) VectorDY(m) Distance(m)----------------------------------------------------------------------------------1 7502-1 CPI1056-1 -21.743 -2655.885 2655.9742 7502-1 CPI1057 824.514 -2619.9552746.6323 7502-1 JM7502 -566.646 -235.947 613.8064 7502-1 JM7502 -566.644 -235.945 613.8055 CPI1057 CPI1056-1 -846.255 -35.930 847.0186 CPI1060 7502-1 603.591 -3688.679 3737.7377 CPI1060 JM7502 36.945 -3924.627 3924.8018 CPI1061 7502-1 1608.884 -4121.537 4424.4309 CPI1061 CPI1060 1005.291 -432.859 1094.52210 CPI1061 JM7502 1042.238 -4357.483 4480.39311 JM7502 CPI1056-1 544.904 -2419.940 2480.53012 JM7502 CPI1057 1391.159 -2384.010 2760.222--------------------------------------------------------------------------------------平差坐标(X,Y)--------------------------------------------------------------------------------------No. Name X(m) Y(m) Mx(cm) My(cm) Mp(cm) --------------------------------------------------------------------------------------1 CPI1056-1 4755885.4720 510504.41312 CPI1057 4756731.7460 510540.34803 CPI1060 4755303.6060 516849.12564 CPI1061 4754298.2900 517281.99255 JM7502 4755340.5495 512924.40676 7502-1 4755907.2116 513160.3612 0.14 0.14 0.20 --------------------------------------------------------------------------------------最弱点--------------------------------------------------------------------------------------No. Name MX(cm) MY(cm) MP(cm)--------------------------------------------------------------------------------------6 7502-1 0.14 0.14 0.20--------------------------------------------------------------------------------------误差椭圆参数(E,F,T)--------------------------------------------------------------------------------------No. Name E(cm) F(cm) T(dms)--------------------------------------------------------------------------------------1 CPI1056-1 0.00 0.00 0.00002 CPI1057 0.00 0.00 0.00003 CPI1060 0.00 0.00 0.00004 CPI1061 0.00 0.00 0.00005 JM7502 0.00 0.00 0.00006 7502-1 0.15 0.13 46.3509--------------------------------------------------------------------------------------二维基线向量残差--------------------------------------------------------------------------------------No. From To V_DX(cm) V_DY(cm)--------------------------------------------------------------------------------------1 7502-1 CPI1056-1 0.19 -0.222 7502-1 CPI1057 -0.02 0.103 7502-1 JM7502 -0.36 -0.154 7502-1 JM7502 -0.48 -0.365 CPI1057 CPI1056-1 0.07 -0.386 CPI1060 7502-1 -0.18 -0.147 CPI1060 JM7502 -0.58 -0.218 CPI1061 7502-1 -0.28 -0.099 CPI1061 CPI1060 0.12 0.0910 CPI1061 JM7502 -0.62 -0.3611 JM7502 CPI1056-1 0.39 0.1212 JM7502 CPI1057 0.42 0.46--------------------------------------------------------------------------------------二维基线向量可靠性--------------------------------------------------------------------------------------No. From To 内部可靠性DX DY--------------------------------------------------------------------------------------1 7502-1 CPI1056-1 0.77 0.722 7502-1 CPI1057 0.81 0.743 7502-1 JM7502 0.81 0.794 7502-1 JM7502 0.81 0.895 CPI1057 CPI1056-1 0.99 0.996 CPI1060 7502-1 0.68 0.627 CPI1060 JM7502 0.86 0.918 CPI1061 7502-1 0.70 0.679 CPI1061 CPI1060 0.97 0.9410 CPI1061 JM7502 0.85 0.8811 JM7502 CPI1056-1 0.90 0.8712 JM7502 CPI1057 0.92 0.90累计内部可靠性 10.08 9.92平均内部可靠性 0.84 0.83内部可靠性总和 20.00内部可靠性均值 0.83--------------------------------------------------------------------------------------------------平差后方位角、边长及精度--------------------------------------------------------------------------------------------------No. FROM TO A(dms) MA(s) S(m) MS(cm) MS:S ppm--------------------------------------------------------------------------------------------------1 7502-1 CPI1056-1 269.31517 0.11 2656.0371 0.14 1/1887000 0.532 7502-1 CPI1057 287.28088 0.11 2746.6937 0.13 1/2036000 0.493 7502-1 JM7502 202.36235 0.45 613.8244 0.15 1/419000 2.384 7502-1 JM7502 202.36235 0.45 613.8244 0.15 1/419000 2.385 CPI1057 CPI1056-1 182.25533 0.00 847.0366 0.00 0 0.006 CPI1060 7502-1 279.17353 0.08 3737.82320.14 1/2719000 0.377 CPI1060 JM7502 270.32215 0.00 3924.89280.00 0 0.008 CPI1061 7502-1 291.19253 0.07 4424.53090.13 1/3308000 0.309 CPI1061 CPI1060 336.42157 0.00 1094.54740.00 0 0.0010 CPI1061 JM7502 283.27052 0.00 4480.49760.00 0 0.0011 JM7502 CPI1056-1 282.41238 0.00 2480.58650.00 0 0.0012 JM7502 CPI1057 300.15552 0.00 2760.28320.00 0 0.00--------------------------------------------------------------------------------------------------最弱边--------------------------------------------------------------------------------------------------No. FROM TO A(dms) MA(s) S(m)MS(cm) MS:S ppm--------------------------------------------------------------------------------------------------3 7502-1 JM7502 202.36235 0.45 613.82440.15 1/419000 2.38--------------------------------------------------------------------------------------------------相邻点坐标分量及其相对中误差--------------------------------------------------------------------------------------------------No. FROM TO dX(m) dY(m) mdX(cm) mdY(cm)--------------------------------------------------------------------------------------------------1 7502-1 CPI1056-1 -21.7396 -2655.9481 0.14 0.14 合格2 7502-1 CPI1057 824.5344 -2620.0132 0.14 0.14 合格3 7502-1 JM7502 -566.6621 -235.9545 0.14 0.14 合格4 7502-1 JM7502 -566.6621 -235.9545 0.14 0.14 合格5 CPI1057 CPI1056-1 -846.2740 -35.9349 0.00 0.00 合格6 CPI1060 7502-1 603.6056 -3688.7644 0.14 0.14 合格7 CPI1060 JM7502 36.9435 -3924.7189 0.00 0.00 合格8 CPI1061 7502-1 1608.9216 -4121.6313 0.14 0.14 合格9 CPI1061 CPI1060 1005.3160 -432.8669 0.00 0.00 合格10 CPI1061 JM7502 1042.2595 -4357.5858 0.00 0.00 合格11 JM7502 CPI1056-1 544.9225 -2419.9936 0.00 0.00 合格12 JM7502 CPI1057 1391.1965 -2384.0587 0.00 0.00 合格--------------------------------------------------------------------------------------------------。

在GPS观测技术出现之前,一般平面控制网都是采用三角网、导线网等形式进行观测。
90年代我国引入了GPS观测技术,由于其精度高且控制点间不需通视的优点,很快就成为平面控制网的主要观测手段。
现在除美国的GPS以外,还有俄罗斯的格洛纳斯(GLONASS),欧盟的伽利略(Galileo)和中国的北斗(BD)等全球卫星导航系统,都可以为我们提供全球高精度的导航定位服务。
全球卫星导航系统简称GNSS,原来的GPS接收机发展到现在基本上都能同时接收GPS、GLONASS、Galileo、BD等卫星信号,所以现在在称为GPS接收机已经不太准确,一般称为GNSS接收机,原来的GPS观测技术也扩展为GNSS观测技术,采用GNSS技术进行观测的平面控制网则称为GNSS控制网。
本文就GNSS控制网的观测和平差进行介绍。
一、GNSS控制网的设计GNSS控制网设计最重要的是确定控制网的等级。
GNSS测量规范比较多,有国家标准也有行业标准。
由于不同的规范对等级的规定不一致,比如《全球定位系统(GPS)测量规范》中规定的等级为B、C、D、E(A级为连续运行参考站网),《全球定位系统(GPS)铁路测量规程》也是B、C、D、E四级,《卫星定位城市测量技术规范》、《城市测量规范》和《工程测量规范》中规定的精度级别为二等、三等、四等、一级、二级,《公路全球定位系统(GPS)测量规范》中规定的等级为一级、二级、三级、四级。
所以要确定GNSS控制网的等级,首先要确定采用的技术依据,也就是用哪个规范。
这个就要根据实际的需求来进行确定,如果实在不确定采用哪个规范,可以直接采用国家标准《全球定位系统(GPS)测量规范》。
图1 《全球定位系统(GPS)测量规范》中的精度等级规定图2 《工程测量规范》中的精度等级规定根据采用的规范确定好GNSS控制网的等级后,就可以根据规范的相关规定进行具体的技术设计。
主要有坐标系统的确定,起算点的选择,控制点点位及布网概略设计,采用的GNSS接收机与数据处理软件及平差软件,控制网观测、数据处理及平差技术要求及上交成果资料等内容。
中交一公局
六威十八标一分部控制网二维约束平差成果
2016年06月中交第一公路工程局有限公司总承包经营分公司
目录
1.输入的基线及标准差 (3)
2.控制点坐标 (5)
3.平差后的基线及标准差 (5)
4.基线改正数及标准差 (7)
5.平差后站点WGS84坐标(XYZ) (8)
6.平差后站点WGS84坐标(BLH) (9)
7.平差后站点目标坐标系坐标(NEU) (9)
8.基线最弱边和平面最弱点 (10)
1.输入的基线及标准差
2.控制点坐标
3.平差后的基线及标准差
4.基线改正数及标准差
5.平差后站点WGS84坐标(XYZ)
6.平差后站点WGS84坐标(BLH)
7.平差后站点目标坐标系坐标(NEU)
8.基线最弱边和平面最弱点。

----------------------------------------------------------------------------------5工区补点二维网平差结果多余观测数= 20已知点数= 5总点数= 6GPS基线向量数= 12地面边长数= 0地面方位角数= 0旋转角(GPS->地面)= -0.000016006(dms)尺度(GPS->地面)= 22.9071(ppm)中央子午线= 130.060000000(dms)椭球长轴= 6378137.000(m)椭球扁率分母= 298.257222101PVV= 2.554(cm^2)M0= 0.357(cm)----------------------------------------------------------------------------------已知坐标(X,Y)----------------------------------------------------------------------------------No. Name X(m) Y(m)----------------------------------------------------------------------------------1 CPI1056-1 4755885.4720 510504.41312 CPI1057 4756731.7460 510540.34803 CPI1060 4755303.6060 516849.12564 CPI1061 4754298.2900 517281.99255 JM7502 4755340.5495 512924.4067----------------------------------------------------------------------------------GPS二维基线向量----------------------------------------------------------------------------------No. From To VectorDX(m) VectorDY(m) Distance(m)----------------------------------------------------------------------------------1 7502-1 CPI1056-1 -21.743 -2655.885 2655.9742 7502-1 CPI1057 824.514 -2619.9552746.6323 7502-1 JM7502 -566.646 -235.947 613.8064 7502-1 JM7502 -566.644 -235.945 613.8055 CPI1057 CPI1056-1 -846.255 -35.930 847.0186 CPI1060 7502-1 603.591 -3688.679 3737.7377 CPI1060 JM7502 36.945 -3924.627 3924.8018 CPI1061 7502-1 1608.884 -4121.537 4424.4309 CPI1061 CPI1060 1005.291 -432.859 1094.52210 CPI1061 JM7502 1042.238 -4357.483 4480.39311 JM7502 CPI1056-1 544.904 -2419.940 2480.53012 JM7502 CPI1057 1391.159 -2384.010 2760.222--------------------------------------------------------------------------------------平差坐标(X,Y)--------------------------------------------------------------------------------------No. Name X(m) Y(m) Mx(cm) My(cm) Mp(cm) --------------------------------------------------------------------------------------1 CPI1056-1 4755885.4720 510504.41312 CPI1057 4756731.7460 510540.34803 CPI1060 4755303.6060 516849.12564 CPI1061 4754298.2900 517281.99255 JM7502 4755340.5495 512924.40676 7502-1 4755907.2116 513160.3612 0.14 0.14 0.20 --------------------------------------------------------------------------------------最弱点--------------------------------------------------------------------------------------No. Name MX(cm) MY(cm) MP(cm)--------------------------------------------------------------------------------------6 7502-1 0.14 0.14 0.20--------------------------------------------------------------------------------------误差椭圆参数(E,F,T)--------------------------------------------------------------------------------------No. Name E(cm) F(cm) T(dms)--------------------------------------------------------------------------------------1 CPI1056-1 0.00 0.00 0.00002 CPI1057 0.00 0.00 0.00003 CPI1060 0.00 0.00 0.00004 CPI1061 0.00 0.00 0.00005 JM7502 0.00 0.00 0.00006 7502-1 0.15 0.13 46.3509--------------------------------------------------------------------------------------二维基线向量残差--------------------------------------------------------------------------------------No. From To V_DX(cm) V_DY(cm)--------------------------------------------------------------------------------------1 7502-1 CPI1056-1 0.19 -0.222 7502-1 CPI1057 -0.02 0.103 7502-1 JM7502 -0.36 -0.154 7502-1 JM7502 -0.48 -0.365 CPI1057 CPI1056-1 0.07 -0.386 CPI1060 7502-1 -0.18 -0.147 CPI1060 JM7502 -0.58 -0.218 CPI1061 7502-1 -0.28 -0.099 CPI1061 CPI1060 0.12 0.0910 CPI1061 JM7502 -0.62 -0.3611 JM7502 CPI1056-1 0.39 0.1212 JM7502 CPI1057 0.42 0.46--------------------------------------------------------------------------------------二维基线向量可靠性--------------------------------------------------------------------------------------No. From To 内部可靠性DX DY--------------------------------------------------------------------------------------1 7502-1 CPI1056-1 0.77 0.722 7502-1 CPI1057 0.81 0.743 7502-1 JM7502 0.81 0.794 7502-1 JM7502 0.81 0.895 CPI1057 CPI1056-1 0.99 0.996 CPI1060 7502-1 0.68 0.627 CPI1060 JM7502 0.86 0.918 CPI1061 7502-1 0.70 0.679 CPI1061 CPI1060 0.97 0.9410 CPI1061 JM7502 0.85 0.8811 JM7502 CPI1056-1 0.90 0.8712 JM7502 CPI1057 0.92 0.90累计内部可靠性 10.08 9.92平均内部可靠性 0.84 0.83内部可靠性总和 20.00内部可靠性均值 0.83--------------------------------------------------------------------------------------------------平差后方位角、边长及精度--------------------------------------------------------------------------------------------------No. FROM TO A(dms) MA(s) S(m) MS(cm) MS:S ppm--------------------------------------------------------------------------------------------------1 7502-1 CPI1056-1 269.31517 0.11 2656.0371 0.14 1/1887000 0.532 7502-1 CPI1057 287.28088 0.11 2746.6937 0.13 1/2036000 0.493 7502-1 JM7502 202.36235 0.45 613.8244 0.15 1/419000 2.384 7502-1 JM7502 202.36235 0.45 613.8244 0.15 1/419000 2.385 CPI1057 CPI1056-1 182.25533 0.00 847.0366 0.00 0 0.006 CPI1060 7502-1 279.17353 0.08 3737.82320.14 1/2719000 0.377 CPI1060 JM7502 270.32215 0.00 3924.89280.00 0 0.008 CPI1061 7502-1 291.19253 0.07 4424.53090.13 1/3308000 0.309 CPI1061 CPI1060 336.42157 0.00 1094.54740.00 0 0.0010 CPI1061 JM7502 283.27052 0.00 4480.49760.00 0 0.0011 JM7502 CPI1056-1 282.41238 0.00 2480.58650.00 0 0.0012 JM7502 CPI1057 300.15552 0.00 2760.28320.00 0 0.00--------------------------------------------------------------------------------------------------最弱边--------------------------------------------------------------------------------------------------No. FROM TO A(dms) MA(s) S(m)MS(cm) MS:S ppm--------------------------------------------------------------------------------------------------3 7502-1 JM7502 202.36235 0.45 613.82440.15 1/419000 2.38--------------------------------------------------------------------------------------------------相邻点坐标分量及其相对中误差--------------------------------------------------------------------------------------------------No. FROM TO dX(m) dY(m) mdX(cm) mdY(cm)--------------------------------------------------------------------------------------------------1 7502-1 CPI1056-1 -21.7396 -2655.9481 0.14 0.14 合格2 7502-1 CPI1057 824.5344 -2620.0132 0.14 0.14 合格3 7502-1 JM7502 -566.6621 -235.9545 0.14 0.14 合格4 7502-1 JM7502 -566.6621 -235.9545 0.14 0.14 合格5 CPI1057 CPI1056-1 -846.2740 -35.9349 0.00 0.00 合格6 CPI1060 7502-1 603.6056 -3688.7644 0.14 0.14 合格7 CPI1060 JM7502 36.9435 -3924.7189 0.00 0.00 合格8 CPI1061 7502-1 1608.9216 -4121.6313 0.14 0.14 合格9 CPI1061 CPI1060 1005.3160 -432.8669 0.00 0.00 合格10 CPI1061 JM7502 1042.2595 -4357.5858 0.00 0.00 合格11 JM7502 CPI1056-1 544.9225 -2419.9936 0.00 0.00 合格12 JM7502 CPI1057 1391.1965 -2384.0587 0.00 0.00 合格--------------------------------------------------------------------------------------------------。
项目总结报告目录1 项目属性1.1 坐标系统1.2 解算数据2 观测文件3 基线解算3.1 基线成果3.2 重复基线检查3.3 同步环检查3.4 异步环检查4 平差结果4.1 WGS84自由网平差结果4.2 二维约束平差结果1 项目属性项目名称:项目单位:责任人:开始日期:结束日期:描述:1.1 坐标系统坐标系名称:椭球:椭球长半轴:椭球扁率倒数:格网文件:投影方法: Guass 3中央经线: 000:00:00.00000E中央纬度: 000:00:00.00000N原始纬度: 000:00:00.00000N比例系数: 1投影面高程(m): 0第一纬度: 000:00:00.00000N第二纬度: 000:00:00.00000N北向加常数(m): 0东向加常数(m): 5000001.2 解算数据观测文件总数: 16站点个数: 10形成基线总条数: 24形成重复条数: 3 合格: 3 不合格: 0 形成同步环个数: 16 合格: 13 不合格: 3 形成异步环个数: 12 合格: 12 不合格: 03.1 基线成果3.2 重复基线检查3.3 同步环检查3.4 异步环检查4 平差结果4.1 WGS84自由网平差结果基线条数: 24平差点数: 10基线标准差置信度(松弛因子): 10.00σTau检验显著水平: 1.00%单位权中误差比: 0.5889x2检验值: 26.5025x2理论范围: 24.3110 - 73.1661 x2检验结果: True4.1.1 平差后的基线及标准差4.1.2 基线改正数及标准差4.1.3 自由网平差坐标平差后最弱边和最弱点基线名中误差_DX(mm) 中误差_DY(mm) 中误差_DZ(mm) 中误差(mm) 相对误差L1-20460.zsd-LDX10460.zsd 1.3 2.7 2.0 3.6 1:127466 站点名中误差_N(mm) 中误差_E(mm) 中误差_U(mm) 点位中误差(mm)LDX1 1.5 1.5 2.9 3.64.2 二维约束平差结果基线条数: 24平差点数: 10基线标准差置信度(松弛因子): 10.00σTau检验显著水平: 1.00%单位权中误差比: 4.6892x2检验值: 159.4328x2理论范围: 16.5013 - 58.9639x2检验结果: False平面四参数:X 平移(m): 86.1402404345933 Y 平移(m): 2.25951627359944 旋转: -000:00:03.12246 缩放: 0.999985588762776高程拟合参数:A:-24.4379250480533B:1.86114109580293E-05C:5.27838445439617E-05D:0E:0F:0X0:2712615.37159918Y0:482231.6232834314.2.1 平差后的基线及标准差4.2.2 基线改正数及标准差4.2.3 二维约束平差坐标平差后最弱边和最弱点基线名中误差_DN(mm) 中误差_DE(mm) 中误差(mm) 相对误差L9-10462.zsd-LD100462.zsd 4.3 4.8 6.4 1:88508 站点名中误差_N(mm) 中误差_E(mm) 点位中误差(mm)LD10 3.8 4.6 6.0。
1、GPS卫星星座配置有(D)颗在轨卫星。
A. 21B. 12C. 18D. 242、UTC是指( C)。
A. 协议天球坐标系B. 协议地球坐标系C. 协调世界时D. 国际原子时3、AS政策是指( D )。
A. 紧密定位服务B. 标准定位服务C. 选择可用性D. 反电子欺骗4、GPS定位中,信号传播过程中引起的误差主要包括大气折射的影响和(A)影响。
A. 多路径效应B. 对流层折射C. 电离层折射D. 卫星钟差5、一般地,单差观测值是在( A )的两个观测值之间求差。
A. 同卫星、同历元、异接收机B. 同卫星、异历元、异接收机C. 同卫星、同历元、同接收机D. 同卫星、异历元、异接收机6、双差观测方程可以消除( D )。
P62A. 整周未知数B. 多路径效应C. 轨道误差D. 接收机钟差7、C/A码的周期是( A )。
A. 1msB. 7天C. 38星期D. 1ns8、在GPS测量中,观测值都是以接收机的( B )位置为准的,所以天线的相位中心应该与其几何中心保持一致。
A、几何中心B、相位中心C、点位中心D、高斯投影平面中心9、岁差和章动旋转变换是用于哪两个坐标系之间的转换( A )。
A、瞬时极天球坐标系与平天球坐标系B、瞬时极天球坐标系与平地球坐标系C、瞬时极天球坐标系与瞬时极地球坐标系D、平天球坐标系与平地球坐标系10.GPS广播星历中不包含(❍)GPS卫星的六个轨道根数 GPS观测的差分改正●GPS卫星钟的改正❍GPS卫星的健康状态11.以下哪个因素不会削弱GPS定位的精度(❍)晴天为了不让太阳直射接收机,测站设在大型水库旁边●在SA期间进行GPS导航定位❍夜晚进行GPS观测12.GPS卫星之所以要发射两个频率的信号,主要目的是( )消除对流层延迟 消除电离层延迟●消除多路径误差❍增加观测值个数13.GPS观测值在接收机间求差后可消除( ●)电离层延迟 接收机钟差●卫星钟差❍对流层延迟14.GPS测量中,卫星钟和接收机钟采用的是哪种时间系统( )GPS时 恒星时●国际原子时❍协调世界时15、GPS定位的实质就是根据高速运动的卫星瞬间位置作为已知数据,采用( A )的方法,确定待定点的空间位置。
中海达静态数据处理软件HGO基线处理技巧1、基线清理数据量大的时候,基线解算比较耗时。
GPS观测接收机数量较多时,会因为自然同步产生许多长基线,即许多相距较远的点连接而成的基线。
这些长基线往往同步观测时间不长,属于不必要的基线,对于控制网质量也无多大益处,所以为了节省计算时间,应在基线解算前将其清理删除。
删除时可在图上选择,也可以在基线表中根据距离选择删除。
2、处理超限闭合环基线解算完成后,首先要检查环闭合差(同步或异步环),对于闭合差大的环,应该进行处理。
闭合环超限处理是一项繁琐、耗时的工作,也是GPS控制网数据处理的主要内容。
主要的技巧和方法可以归纳为:(1)、基线解算的精度指标rms和ratio是基线解算质量的参考指标,前者是中误差,后者是方差比(ratio=〖rms〗_max/〖rms〗_min),rms越小,表明基线解算质量越高,ratio越大,表明整周未知数解算越可靠,所以重解基线,要关注这两项指标,但是这两项指标只作参考,最重要的指标还是闭合差。
(2)、超限基线处理过程中一些基线要重新解算,解算后会影响到相关环闭合差,所以处理需要反复进行。
作为一般的原则,首先处理相对闭合差较大的环,然后处理环闭合差较小的环。
(3)、整理归纳超限闭合环,分析是否涉及到一条共同基线,例如几组超限闭合环(J012,J015,J016)、(J013,J015,J102)、…,(J012,J020,J015)就涉及到共同基线J012→J015,这条基线有问题的可能性就较大。
(4)、处理时首先分析可能有问题的基线是否必要,如果是连接两个不相邻的点,并且涉及到环甚多,则可以直接将其删除。
(5)、如果一个闭合差超限的环,相关基线均不能简单删除(删除后影响图形结构,减少了重要环路),应该改变基线解算参数,重新计算相关基线。
方法是在选中重解基线,更改高度截止角,采样间隔,历元间隔、等设置,保存至选中基线,重新解算。
(6)、如果反复修改设置重解基线后,仍不能减小环闭合差,则可将闭合差超限环中的基线,分别与周边的基线组成闭合环,检查其闭合差。