机电系统建模与仿真试题
- 格式:pdf
- 大小:297.38 KB
- 文档页数:9
1、ADAMS 软件在静力学、_______学和动力学方面的功能非常强,但在三维建模、科学计算与控制、___________分析方面相对较差。
2、某典型二阶系统的传递函数为216()416
G s s s =++,则该系统的固有频率n ω=____________rad/s ,阻尼系数ξ=__________。
3、MATLAB 中,对连续系统的单位阶跃响应的调应指令格式是__________,对连续系统的单位脉冲响应的调应指令格式是__________。
4、某机构先绕Ox 旋转ϕ角,再绕Oz 轴旋转ψ角,最后Oy 旋转θ角,试求出旋转矩阵。
5、试编制MATLAB 程序指令,以绘制开环传递函数25()(21)
G s s s =
+的Bode 和Nichols 图
6、何为半物理仿真?半物理仿真主要有哪几种类型?
7、已知系统的传递函数模型为43254326425()87537s s s G s s s s s +++=++++,试写出其零极点增益模型、传递函数模型和状态空间模型的MATLAB 函数表达式;并写出其阶跃时间响应的MATLAB 函数表达式。
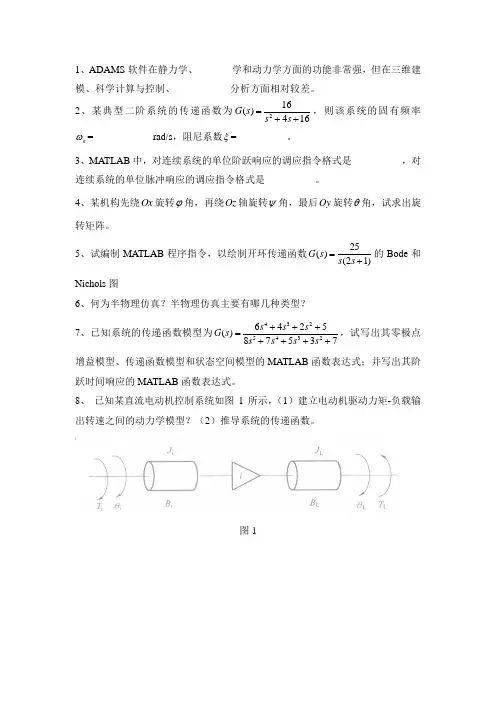
8、 已知某直流电动机控制系统如图1所示,(1)建立电动机驱动力矩-负载输出转速之间的动力学模型?(2)推导系统的传递函数。
图1。
1、下列为比例环节的是 ( )A 、10;B 、1/(s+1);C 、1/s ;D 、s+1。
2、下列不是数字仿真所具有的优点的是( )A 、经济;B 、安全;C 、环保D 、快捷。
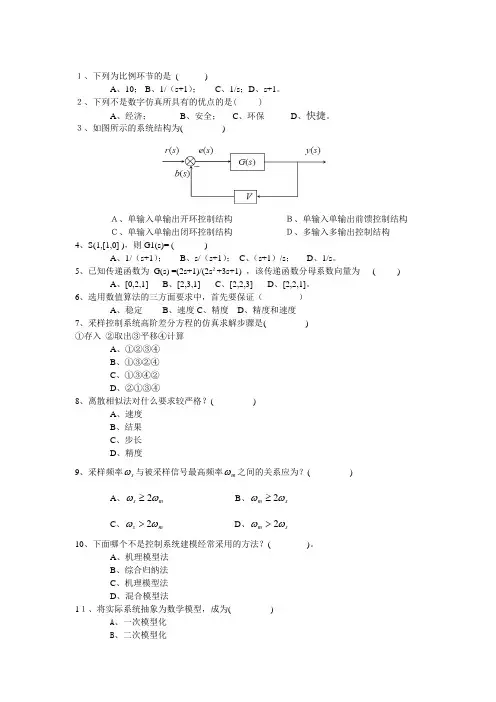
3、如图所示的系统结构为( )A、单输入单输出开环控制结构 B、单输入单输出前馈控制结构 C、单输入单输出闭环控制结构 D、多输入多输出控制结构4、S(1,[1,0] ),则G1(s)= ( )A 、1/(s+1);B 、s/(s+1);C 、(s+1)/s ;D 、1/s 。
5、已知传递函数为 G(s) =(2s+1)/(2s ²+3s+1) ,该传递函数分母系数向量为 ( )A 、[0,2,1]B 、[2,3,1]C 、[2,2,3]D 、[2,2,1]。
6、选用数值算法的三方面要求中,首先要保证( )A 、稳定B 、速度C 、精度D 、精度和速度7、采样控制系统高阶差分方程的仿真求解步骤是( )①存入 ②取出③平移④计算A 、①②③④B 、①③②④C 、①③④②D 、②①③④8、离散相似法对什么要求较严格?( )A 、速度B 、结果C 、步长D 、精度9、采样频率s ω与被采样信号最高频率m ω之间的关系应为?( )A 、m s ωω2≥B 、s m ωω2≥C 、m s ωω2>D 、s m ωω2>10、下面哪个不是控制系统建模经常采用的方法?( )。
A 、机理模型法B 、综合归纳法C 、机理模型法D 、混合模型法11、将实际系统抽象为数学模型,成为( )A 、一次模型化B 、二次模型化C、三次模型化D、四次模型化12、下列不属于模拟仿真优缺点的是( )A、描述连续的物理系统的动态过程比较自然而逼真B、仿真速度极快,失真小,结果可信度高C、受元器件性能的影响,仿真精度较低D、仿真实验的自动化程度较高13、下列不属于仿真系统具有的三种特性的是( )A、整体性B、相关性C、隶属性D、独立性14、控制系统常用的实验方法不包括:( )A、解析法B、实验法C、仿真实验法D、时域法15、下列不属于建立系统模型的内容的选项是:( )A、确定模型的结构,建立系统的约束条件B、将理论清晰、概念明确但很计算复杂的工作交给计算机C、测取有关的模型数据D、检测所建立的数字模型的正确性。
机电系统建模与仿真张立勋版课后答案
1、光机电一体化的系统设计原则主要包括(D)。
A、机电互补原则。
B、功能优化原则。
C、自动化原则。
D、效益最大原则。
E、开放原则。
2、模拟信号数字化的第一步是在时间上对信号进行(B)处理。
A、量化处理。
B、采样离散化处理。
C、编码处理。
D、调制处理。
3、PCM是指(D)。
A、脉幅调制。
B、脉宽调制。
C、脉位调制。
D、脉冲编码调制。
4、经采样后的信息属于(B)。
A、数字信号。
B、离散化的模拟信号。
C、连续模拟信号。
D、调制信号。
5、数字信号是对时间离散模拟信号进行(A)处理后得到的。
A、量化处理。
B、采样离散化处理。
C、编码处理。
D、调制处理。
1 机电系统仿真35套试卷汇总试卷1(填空题型)1.船舶制造中,按照一个比例尺缩小建立一个模型,然后将其放入水池中进行实验研究,满足 相似原则。
几何2.函数sys = tf (num ,den ,Ts )表示 , 为采样时间,若Ts = -1或[],则表示 。
Z 传递函数,Ts ,时间未指定3.物理仿真和数学仿真的显著区别是物理仿真有 介入,而数学仿真没有。
实物4.系统模型分为两大类,即 模型和 模型。
物理,数学5.常用的数值积分法有: 和 。
欧拉(Euler )法, 龙格-库塔(Runge-Kutta )法6.按照计算机的类型分类,仿真分为 、 、 、 和全数字仿真。
模拟仿真,数字仿真,混合仿真,分布式数字仿真7.虚拟现实的三个重要特征 、 、 。
交互,沉浸,想象8.仿真实验所遵循的基本原则是 。
相似原理9.数字仿真三个基本要素 、 与 。
实际系统,数学模型,计算机10.在生成bode 图频率序列时,使用 函数可以得到对数等间距的序列。
Logspace试卷2(填空题型)1.不同物理对象的传递函数可以相同,这符合 相似。
性能2.离散系统分为 系统和 系统。
离散时间,离散事件3.将模拟仿真和数字仿真结合起来的仿真实验系统,称为 。
混合仿真4. 、 、 是虚拟现实具有的最重要的三个特征。
交互,沉浸,想象5.输入数据块、初始化块、 、输出结果块是构成一个完整的仿真程序必须至少建立的四个组成部分。
运行计算块6.控制系统常用的分析方法有 、 、 三种。
时域分析,频域分析,根轨迹7.组成系统的三个要素包括 、 、 。
实体,属性,活动8.MATLAB 中0/0无意义,MATLAB 用 表示。
nan9.以时间为分类依据,系统可以分为 系统、 系统和 系统。
连续,离散,混合10.传递函数G (s )=213+-s s s )(二对组模型的分子向量num = ,分母向量den= 。
[1 -1 0],[1 0 0 2]试卷3(填空题型)1. 是对系统特征与变化规律的一种定量抽象,是人们认识事物的一种手段。
机电仿真样卷7一.简答题。
(6*5’)1.按照模型分类,仿真系统模型如何分类?物理模型,数学模型。
2.在MATLAB中,用什么产生全0矩阵(零矩阵)?用什么产生全1矩阵(幺矩阵)?zeros,ones。
3.虚拟现实技术具有什么样的特征?交互,沉浸,想象。
4.试述系统的组成。
实体,属性,活动。
5.为什么说龙格—库塔法精度比欧拉法高?龙格—库塔法具有二阶计算精度,而欧拉法具有一阶精度,所以,龙格—库塔法精度比欧拉法高。
6.在MATLAB中,如何表示A和B对应单个元素之间相乘?A.*B二.填空题。
(10*1’)1.在MATLAB中,____和_____用来实现状态方程与零极点增益形式间转换。
ss2zp(),zp2ss()2.在MATLAB中,转置运算符是____________。
单撇号(')3.建模三要素是:____,______,____________。
目的、方法、验证4.MATLAB中用___________来求矩阵A的全部特征值,构成向量E。
E=eig(A)5.流程控制中的循环模式一般有____,______和______三种。
For循环,While循环,If-Else-End循环三.判断题。
(10*1’)1.\ :左除,如A\B = B*inv(A),/ :右除,如B/A = inv(A)*B 。
2.Matlab工具箱提供了LTI(Linear Time Invariable)模型对象。
使控制系统各种模型相互转换非常方便。
3.四阶龙格-库塔法求解精度不高,不能接近真值。
4.系统具有整体性,无关性,隶属性的特性。
5.eye:产生单位矩阵。
rand:产生0~1间均匀分布的随机矩阵。
6.CAD技术的一般概念是计算机辅助设计。
7.函数sys = tf(num,den,Ts)表示Z传递函数,Ts为采样时间,若Ts=-1或[],则时间未指定。
8.状态方程形式适用于控制系统输入、输出为单变量的系统。
《电力电子系统建模与仿真》题集一、选择题(每题2分,共20分)1.在电力电子系统建模过程中,哪一种软件工具常被用于进行系统级仿真分析?( )A. Microsoft OfficeB. AutoCADC. MATLAB/SimulinkD. Photoshop2.PWM (脉宽调制)技术中,通过调节什么参数来控制开关管的导通时间?( )A. 电压幅值B. 电流频率C. 脉冲宽度D. 电容容量3.在Simulink环境中,哪个模块库提供了丰富的电力电子元件模型用于系统仿真?( )A. Simulink Control DesignB. SimPowerSystemsC. Communications System ToolboxD. Robotics System Toolbox4.电力电子系统建模的主要目的是什么?( )A. 提高系统美观性B. 分析和优化系统性能C. 增加系统复杂性D. 降低系统成本5.在进行电力电子系统仿真时,哪个因素对于仿真结果的准确性至关重要?( )A. 计算机的显示器尺寸B. 元器件模型的精度C. 仿真软件的安装位置D. 操作系统的版本6.SPWM (正弦脉宽调制)技术主要应用于哪种电力电子变换器?( )A. DC-DC变换器B. AC-DC整流器C. DC-AC逆变器D. AC-AC变频器7.PID控制器在电力电子系统中主要起什么作用?( )A. 增加系统噪声B. 提高系统稳定性C. 降低系统效率D. 增加系统功耗8.在电力电子系统仿真中,设置合适的仿真步长对结果有何影响?( )A. 不影响仿真结果B. 提高仿真速度但降低精度C. 平衡仿真速度和精度D. 只影响仿真过程中的动画效果9.电力电子系统中的核心元件是什么?( )A. 电阻和电容B. 电感和变压器C. 电力电子开关器件D. 传感器和执行器10.在进行DC-DC变换器仿真时,需要关注哪些性能指标?( )A. 变换效率和输出电压纹波B. 变换器的重量和体积C. 变换器的颜色和材质D. 变换器的生产厂家和品牌二、填空题(每题2分,共20分)1.电力电子系统建模中,常用的两种仿真方法是________________和________________。

机电系统仿真技术试题姓名:刘丽欢 学号:0009 专业:机械电子工程 电话: 一、用MATLB 指令求解下列各题1. 求⎥⎦⎤⎢⎣⎡=5361A 的特征值和特征向量。
>> A=[1,6;3,5];>> [V ,D]=eig(A) V =-0.9125 -0.6676 0.4092 -0.7445 D =-1.6904 0 0 7.6904 2. 求⎥⎦⎤⎢⎣⎡=3752B 的特征多项式。
>> B=[2,5;7,3]B =2 5 73 >> C=poly(B) C =1.0 -5.0000 -29.0000该矩阵的特征多项式为295)(2--=S S s P3. 已知⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=200310211E ,求其约旦标准形。
>> E=[1 1 2;0 1 3;0 0 2];C=jordan(E) C =2 0 0 0 1 1 0 0 1E 的约旦标准形是⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡100110002 4. 求递推方程)2(4)1(3)(----=n f n f n f 的通解。
>> f=maple('rsolve(f(n)=-3*f(n-1)-4*f(n-2),f(n))'); disp('f(n)='),disp(f) function work22(n,i,j) syms a b A=ones(n) for a=1:nfor b=1:nif (a+b)==(i+j) A(a,b)=0; end end end disp(A) f(n)=(3/7*i*f(1)*7^(1/2)+f(1)+1/7*i*f(0)*7^(1/2)+3*f(0))*(-8/(3-i*7^(1/2)))^n/(3-i*7^(1/2))-1/7*i*7^(1/2)*(3*f(1)+i*f(1)*7^(1/2)+f(0)+3*i*f(0)*7^(1/2))*(-8/(3+i*7^(1/2)))^n/(3+i*7^(1/2)) 5. 求定积分⎰--15152/221dx e x π>> syms x;f=exp(-x^2/2); a=int(f,-15,15); an=a/(2*pi)^0.5 an =/*erf(15/2*2^(1/2))*2^(1/2)*pi^(1/2) 二、 完成下列各个程序段 1.求1000以内的质数。
机电控制系统模拟题一、二、三、四、五答案一、简答题1、简述控制系统有哪些要求?解:1.稳定性 2.准确性 3.快速性2、步进电机有哪些特点解:1。
步进电机本体部件少,无刷,价格便宜,可靠性高。
2.位移与输入脉冲成正比,速度与输入脉冲频率成正比 3.步距值不受各种干扰因素的影响。
4.步距误差不长期积累 5.控制性能好。
6.停止时,具有自锁能力,这对于位置控制显得很重要 7.步距角选择范围大8.可以达到较高的调速范围。
9.带惯性负载的能力较差10.步进电机的驱动电源直接关系到运行性能的优劣。
4、 负载转矩和转动惯量对步进电动机的启动频率和运行频率有什么影响? 解:11、有静差调节系统和无静差调节系统的含义是什么? 解:有静差调节系统:12、积分调节器为什么能消除误差? 解:稳态误差13、什么叫调速范围?什么叫静差度?这两项指标有什么关系? 解:调速范围(D ):在额定负载转矩下电动机可能跳到的最高转速max n 与最低转速min n 之比。
静差度(S ):直流他励电动机工作在某条机械特性上,由理想空载到到额定负载运行的转速降 ΔN n 与理想空载转速0n 之比,取其百分数称为该特性的静差率。
关系:)1(max S n S n D N -∆=14、直流调速有哪些方法?比较各种方法的特点。
解:略,见课件15、简述直流桥式双极型可逆pwm 变换器原理 解:略,见课件16、双闭环调速系统中转速调节器的作用是什么?它的输出限幅值按什么进行调整?电流调节器的作用是什么?它的限幅值按什么来整定? 解:双闭环调速系统的静特性在负载电流小于I dm 时表现为转速无静差,这时,转速负反馈起主要调节作用。
当负载电流达到I dm 后,转速调节器饱和,电流调节器起主要调节作用,系统表现为电流无静差,得到过电流的自动保护。
转速调节器ASR 的输出限幅电压U *im 决定了电流给定电压的最大值;电流调节器ACR 的输出限幅电压U cm 限制了电力电子变换器的最大输出电压U dm 转速调节器的作用(1)转速调节器是调速系统的主导调节器,它使转速 n 很快地跟随给定电压变化,稳态时可减小转速误差,如果采用PI 调节器,则可实现无静差。

机电仿真样卷2一.简答题。
(6*5’)1.系统建模的三要素是什么?目的、方法、验证。
2.试述CAD 技术的一般概念。
计算机辅助设计。
将计算机和设计者结合起来,加快设计进程,提高设计质量的技术。
3.在MATLAB 中,如何统计字符串K 中小写字母的个数?length(K)。
4.常用的数值积分法有哪些?欧拉法, 龙格——库塔法。
5.试分析模拟仿真的优缺点。
适于连续系统仿真,快而精确;不适用于离散系统仿真。
6.系统有哪三大特性?整体性,相关性,隶属性。
二.填空题。
(10*1’)1.仿真是指____________________________;仿真的基本原则是____________________________。
在模型上所进行的系统性能分析与研究的实验方法;相似原理。
2.数字仿真三要素是_______,_________和____________。
实际系统,数学模型,计算机。
3.在MATLAB 中,应用____删除矩阵中的元素。
[ ]4.11101110()mm m m n n n n b s b s b s b G s a s a sa s a ----+++=+++ 的传递函数模型:110[]m m num b b b b -= 是___________________;分子向量110[]n n den a a a a -= 是___________________。
分母向量5.微分方程形式的初始条件为____________:设线性定常系统输入、输出量是_______,分别为 u(t), y(t)。
0 , 单变量三.判断题。
(10*1’)1.物理仿真有非实时性与不在线的特点;数学仿真有实时性与在线的特点。
2.Matlab 中的函数文件不可以直接运行。
3.微分方程与传递函数形式的模型参数向量完全一样。
4.Matlab 中用函数tf2zp()和zp2tf()用来完成传递函数与部分分式形式两种形式之间的转换。
《系统建模与仿真》复习题样例一、单项选择题(每题0.5分,共32题) 1、WITNESS 建模过程中,需要修改布局窗口的名称和背景颜色,可以通过下列哪个菜单操作完成(操作完成()。
----序号473 A 、VIEW->Screen EditorB 、Window->Interact BoxC 、Window->ControlD 、Window->Designer Elements 2、在程序执行时,根据不同的条件,选择执行不同的程序语句,用来解决有选择、有转移的诸多问题的结构是( )。
----序号237 A 、顺序结构、顺序结构 B 、循环结构、循环结构 C 、分支结构、分支结构 D 、模块结构、模块结构3、零件(part )到达系统的时间间隔规律在零件详细设计对话框的()到达系统的时间间隔规律在零件详细设计对话框的()中进行设置。
----序号148A 、typeB 、first arrivalC 、inter arrivalD 、to4、机器(machine )元素的静态显示图标是由()元素的静态显示图标是由()显示项目确定的----序号99 A 、name B 、icon C 、style D 、text5、图标代表的是那种类型的元素(代表的是那种类型的元素()。
----序号461 A 、Fluid B 、Pipe C 、Processor D 、Tank6、在Index 型输送链中对其长度进行设置需要在conveyor 详细设计对话框中的( )进行设置。
----序号168A 、length in partsB 、index timeC 、actions on finishD 、from7、如果要对容器的轮廓进行可视化设计以便能看到流体经过该容器,我们需要对容器的( )属性进行设置。
----序号309A 、tankB 、contentsC 、mixD 、laborqueue8、一系统中有一流体(fluid )元素oil ,系统运行100min 后检查该流体在某一处理器Processor 中的在制品库存,所用到的函数是(中的在制品库存,所用到的函数是()。