自由边界条件下克拉尼图形的模拟
- 格式:doc
- 大小:199.00 KB
- 文档页数:11
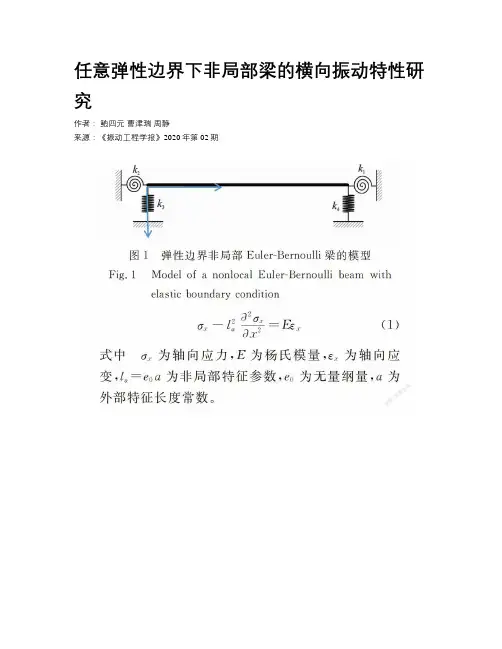
任意弹性边界下非局部梁的横向振动特性研究作者:鲍四元曹津瑞周静来源:《振动工程学报》2020年第02期摘要:基于非局部理論,对任意弹性边界Euler-Bernoulli梁的横向振动特性进行分析。
在结构两端边界引人横向位移弹簧和旋转约束弹簧,通过设置其刚度大小来模拟从自由到固支的各种边界条件。
计算中先将梁的位移函数以改进傅里叶级数形式表示,然后采用基于Lagrange 泛函的瑞利一里兹法建立关于改进傅里叶级数系数的线性方程组。
根据此方程组有非零解的条件,通过求解广义特征值问题得到梁的固有频率和振型曲线。
算例结果表明所提方法具有合理性且具有良好的精度,并进一步探究非局部影响系数与弹性边界约束刚度对非局部梁振动的影响。
关键词:结构振动;横向振动;非局部理论;谱几何法;弹性边界条件中图分类号:0327;0343文献标志码:A 文章编号:1004-4523(2020)02-0276-09DOI:10.16385/ki.issn.1004-4523.2020.02.007引言自从Iijima1991年发现碳纳米管以来,工程结构逐渐向微型化、智能化的方向发展,而纳米梁作为重要构件在微机电系统、生物传感器和原子力显微镜等领域得到日益广泛的应用。
在研究微尺度结构力学性能的诸多方法中,实验研究由于对试样、仪器和测试方法的严苛要求,以及对精度控制的困难性而备受局限。
分子动力学模拟因程序计算量巨大,计算效率较低而难以进行。
在微纳米尺度下,材料特征长度尺寸接近材料颗粒尺寸,结构的尺度效应不可忽略,传统连续介质理论已无法准确预测微纳米尺度结构的力学性能。
因此,考虑尺度效应的非局部理论成为微纳米力学领域的一个研究重点。
作为在经典连续介质理论基础上的扩充与发展,非局部理论能够计及微观尺度效应,为解决考虑到内部微观或细观结构的问题奠定了理论基础。
非局部理论的基本思想是某点的应力状态不仅与该点的应变状态有关,同时与整个域内所有点的应变状态有关。
自由面流体力学问题的数值模拟与优化自由面流体力学问题是指涉及自由表面的流体流动问题,如水波、液滴、水柱等。
这类问题的数值模拟与优化是研究自由面流体力学问题的重要手段之一。
在自由面流体力学问题的数值模拟中,常用的方法有Eulerian方法和Lagrangian方法。
Eulerian方法将流体看作是通过固定的网格单元流动的,通过对流体流动的控制方程进行离散化求解,得到流体的速度和压力场。
Lagrangian方法则是跟踪流体中的每个质点的位置和速度,通过求解质点的运动方程来模拟流体的运动。
这两种方法各有优势,选择合适的方法取决于具体的问题和模拟要求。
在自由面流体力学问题的数值模拟中,常用的数值方法有有限差分法、有限元法和边界元法等。
有限差分法将偏导数用差分近似表示,将控制方程离散化为代数方程组,通过求解方程组来得到数值解。
有限元法则将流体域划分为有限个单元,通过对单元内的控制方程进行积分和离散化,得到数值解。
边界元法则将流体域划分为内部和边界两部分,通过求解边界上的积分方程来得到数值解。
这些方法在数值模拟自由面流体力学问题时,都需要考虑到自由面的边界条件和流体的非线性特性。
在自由面流体力学问题的数值模拟中,还需要考虑到模型的验证和验证。
模型验证是指将数值模拟结果与实验数据进行对比,验证模型的准确性和可靠性。
模型优化则是通过调整模型的参数和算法,使得数值模拟结果更加接近实际情况。
模型优化可以采用传统的试错方法,也可以采用现代的优化算法,如遗传算法、粒子群算法等。
通过模型验证和优化,可以提高自由面流体力学问题的数值模拟的准确性和可靠性。
总之,自由面流体力学问题的数值模拟与优化是研究自由面流体力学问题的重要手段。
通过选择合适的数值方法和算法,并进行模型验证和优化,可以得到准确可靠的数值模拟结果,为解决实际问题提供重要的参考和指导。
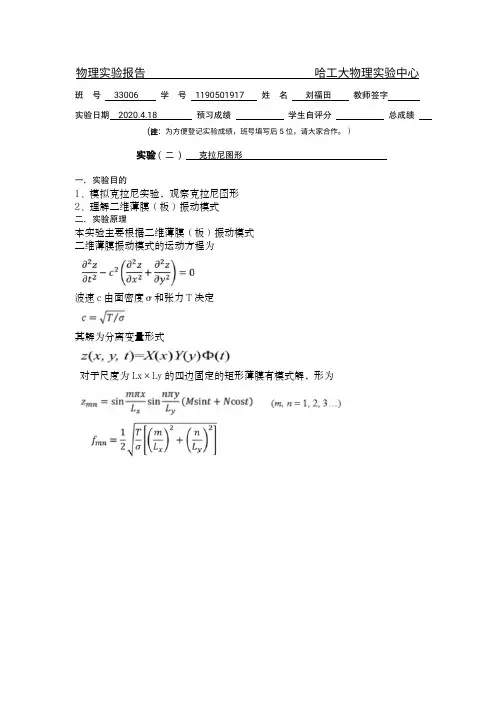
液体表面驻波的演示和驻波波长的测量卢桂林;钟浩源;谭铝平;翟若迅;白在桥【摘要】将液体平铺在透明亚克力平板上,在表面张力的作用下得到均匀的液膜.驱动平板上下振动,在合适的频率下可在液膜表面得到稳定的驻波图样.通过光学方法将驻波图样投影到屏幕上,适当地调制投影光源,可以显示不同相位的驻波峰值图样.利用自制装置演示了不同形状液膜的驻波,测量了驻波波长,并得到液体毛细波的色散关系.【期刊名称】《物理实验》【年(卷),期】2019(039)005【总页数】5页(P29-33)【关键词】驻波;波长;毛细波;色散关系【作者】卢桂林;钟浩源;谭铝平;翟若迅;白在桥【作者单位】北京师范大学物理学系,北京100875;北京师范大学物理学系,北京100875;北京师范大学物理学系,北京100875;北京师范大学物理学系,北京100875;北京师范大学物理学系,北京100875【正文语种】中文【中图分类】O353.5在物理教学中,水波经常被用来演示一般的波动规律,比如波的干涉和衍射. 水波的定量测量比较复杂[1-4],一般需要水槽和造波装置[5-6]. 本文提出简便的水波驻波观察和测量方法:将透明亚克力平板切割成一定形状和尺寸的承液板,把液体铺在承液板上,在表面张力作用下形成1层液膜,将驱动承液板放置在振动台上,使之上下微幅振动. 在合适的驱动频率下,液膜表面可形成稳定的驻波图样. 由于没有水槽壁的摩擦,波在液膜边界的反射系数更高,产生的驻波图样更完整、清晰. 该方法既可以演示不同形状液膜的驻波图样,也可以定量测量液体毛细波的色散关系,进而得到液体的表面张力系数.1 理论分析1.1 水波的色散关系水波的回复力包括重力和表面张力,水波的波速与波长和水深都有关系. 水波振幅比较小时,忽略高阶效应,线性水波的色散关系为(1)其中,ω为角频率,k为波数,g,σ,ρ,h分别为重力加速度、液体表面张力系数、液体密度和液体深度. (1)式的推导可参见文献[7].与空气中的声波或真空中的光波不同,水波的ω不与k成正比,这说明水波有色散,相速度与群速度不相等,它们随波长的改变而改变. 对于长波(k→0),表面张力可以忽略,此时称为重力波. 如果水深远小于波长,则有近似无色散,但波速与成正比. 如果水深远大于波长,则对于短波重力可以忽略,此时称为毛细波. 如果深度足够,满足tanh (kh)≈1,则有1.2 驻波图样用前述的方法得到的水膜厚度约为3 mm,而平板的尺度在10 cm,因此除了弧形的边缘部分,水膜可认为厚度均匀. 液膜上驻波图案对应于水波方程在给定边界条件下的本征函数. 但边界条件的数学形式并不容易确定,精确的驻波形式不易计算. 不过驻波产生的机制并不复杂:水波在液膜边界反射改变方向,不同行进方向的行波叠加而形成驻波. 对于几种简单形状的液膜,可以结合实验现象写出其驻波形式. 对于正方形水膜,驻波形式为u(x,y,t)=C[cos (kx)+cos (ky)]cos (ωt).(2)对于正三角形或正六边形水膜,驻波形式为(3)其中(ki,qi)=k[cos (iπ/3),sin (iπ/3)],C为常量. 这里ω和k满足色散关系(1)式,而且只能取由液膜形状确定的离散值.为便于理解,用Matlab画出2种驻波图样,见图1和图2. 图中黄色代表波峰,蓝色代表波谷,随时间推移,波峰和波谷位置周期性互换.图1 正方形水膜上的驻波图样(a)t=0(b)t=π图2 正三角形和正六边形水膜上的驻波图样需要指出的是,对于正方形水膜上的驻波,峰值点和谷值点各形成正方点阵,每套点阵相差1个平移,空间周期都是λ=2π/k. 而正三角形或正六边形水膜上的驻波图样则不然,峰值和谷值形成的点阵形状并不相同,分别为正三角形点阵和类似蜂窝状网格.1.3 驻波成像由于液体透明而且驻波的振幅很小,不便于直接观察. 1束平行光透过液膜,液膜表面波可以看成若干凸透镜(波峰)与凹透镜(波谷)的组合,其中凸透镜可以使光束会聚,在观察屏上形成亮点或亮线(见图3).图3 水波波峰成像示意图假设液膜按(2)式振动. 当cos (ωt)=1时,振幅达到最大,此时原点处有1个峰值.当x,y趋于0时,所以液面最大的曲率为对应最短的焦距为其中n=1.33为水的折射率. 若fmin=16 cm,代入实验的典型值k=1 000 m-1,得到振幅2c=0.038 mm,远小于液膜厚度.2 实验装置和实验方法2.1 实验装置实验装置包括振动台、液膜和投影光路3部分,实物图和示意图分别见图4和图5.由于实验需要的振幅很小,选用4个4寸低音扬声器作为振动源. 用1块挖去4个圆孔的平板将扬声器的相对位置固定,并放置在装有调平地脚的平台上. 信号发生器输出正弦波,经功率放大器后串联通过4个扬声器,保证它们同步振动. 将边长16 cm的正方体支架的4个脚分别放在4个扬声器的振膜上. 平台和支架均由透明亚克力板切割粘接制成.承液板用透明亚克力板切割而成. 虽然液膜的厚度不能调节,但由于激光切割的便利性,水膜的形状和尺寸很容易改变,方便研究边界形状对液膜驻波图样的影响. 将承液板放在正方体支架的上表面. 支架内部放置倾斜角为45°的平面反射镜. 支架前表面粘1张硫酸纸作为投影屏,如图5所示.图4 实验装置实物图图5 实验装置示意图实验用激光做投影光源. 激光经扩束和平面镜反射后从正上方垂直照射到液膜上,然后经过正方体支架内部的反射镜,投射在屏上. 屏到液膜的光路约为16 cm. 由于视觉暂留现象,如果保持光源常亮,人眼看到的图案是不同振动相位的叠加效果.为了克服视觉暂留,实验采用的激光器有输出调制功能. 采用与振动信号同频率而且相位差和宽度都可调的脉冲信号调制激光输出,可以观察到特定相位的驻波图案,同时也提高了显示图像的对比度.2.2 实验方法在完成水平调节以及液膜准备之后,操作步骤为:1)保持光源常亮,调节振动台驱动信号频率,找到液膜共振频率,调节驱动振幅,使投影屏上的图案尽量清晰.2)将光源调制信号频率调至振动台频率,调节相位延迟与脉冲宽度,观察液膜振幅最大时刻对应的驻波图样,完成需要的测量.重复步骤1)和2),完成一系列共振模式的观察和测量.为了实验方便,并提高测量精确度,利用摄像头采集图像,并用LabVIEW编写控制和测量程序. 图6为LabVIEW程序的前面板,主要分为5个区域:Ⅰ区为摄像头采集到的成像图,由于使用激光的波长为532 nm,程序做了简单的图像处理,只显示绿色分量,这样可以滤除环境杂光. Ⅱ区为控制部分,通过VISA控制信号发生器,调节振源频率、振幅、振源与光源调制信号的频率差、调制信号的相位和占空比. Ⅲ区控制图像的测量区域,在采集图像的特定位置选取矩形区域. 程序将所选区域的光强按垂直方向求和,得到一维光强分布. 然后对数据进行低通滤波(相当于长时间取平均),结果在Ⅳ区用图形显示,图中每个峰值代表Ⅰ中矩形框中的1条亮线. 图形显示控件有若干光标,左右移动可以对峰值定位. 光标位置坐标在Ⅴ区显示.图6 控制测量前面板在做图像测量之前需要进行长度定标. 定标采用图7所示的定标板,由多条平行的透光缝组成,缝间距为5 mm. 将定标板放液膜的位置,测量图像中亮条纹的位置,定出标度系数.图7 定标狭缝板3 结果与分析3.1 驻波演示图8为不加光源调制时一些液膜上的驻波投影图,其中正方形板得到正方形网格,圆形板得到同心圆圈,三角形和六边形板均得到正六边形蜂窝状网格加中心亮点图案.(a)正方形板 (b)圆形板(c)六边形板 (d)三角形板图8 未经激光调制的成像图用与振源同频率、占空比为10%的脉冲调制光源输出,在合适的相位差下,得到清晰的驻波图案,结果见图9. 与不加调制的图像相比,调制后的图案更清晰、对比度更高. 图9(a)和9(b)中亮线数目减半. 图9(c)和9(d)中,正三角形和正六边形板的图案由图8(c)和8(d)分裂为六边形蜂窝状网格和三角形格点2套图案,这与Matlab模拟结果一致.(a)正方形板 (b)圆形板(c)六边形板(d)三角形板图9 经激光调制的成像图3.2 驻波波长测量使用正方形液膜,调节振源频率得到一系列共振,记录信号发生器频率f,并从对应驻波图案中测出波长λ(定标系数为0.087 3 mm/pixel). 自来水和肥皂水的测量结果见表1.表1 水波的频率与波长f自/Hzλ自/mmf肥/Hzλ肥/mm239.270217.724258.663296.241 307.552355.658 337.233385.037 366.772414.971396.455444.646 435.917484.401 465.619514.064 495.339553.950554.901603.762 624.455633.569 664.308714.134753.901823.598自来水和肥皂水的色散关系曲线见图10. 由于液膜深度在3 mm左右,测量区间的波数满足tanh (kh)≈1,按照拟合测量数据,得到自来水和肥皂水的表面张力系数分别为5.00×10-2N/m和2.55×10-2N/m. 该结果与用拉脱法测得的结果基本一致.用ω2-gk与k做双对数图,拟合结果见图11. 自来水数据的斜率为3.03,肥皂水数据的斜率为3.38,斜率与理论值基本符合. 自来水的数据与理论更符合,这可能是肥皂水表面张力系数小,低频时容易引起非线性效应造成的.图10 自来水和肥皂水的色散曲线图11 ln (ω2-gk)与lnk的关系4 结束语直接观察铺在透明亚克力板上的水膜(相当于1颗扁平的大水滴)上的驻波,通过光学方法将驻波图样投影在屏幕上,可以演示不同的驻波图案,并且可以测量毛细波的色散关系. 承液板容易加工成不同的形状与尺寸,方便进行设计性实验,探究液膜边界对波动的影响. 通过光源调制,可显示不同时刻的驻波图样. 基于图像的测量系统,操作简便而且结果比较准确. 与克拉尼图形实验相互参照,该装置可用来演示二维驻波,也可以作为液体表面张力系数的测量装置,引入大学物理实验教学.【相关文献】[1] 丁力,娄昊楠,吕景林,等. 水波频闪法测量液体表面张力系数[J]. 大学物理实验,2005,18(3):8-10.[2] 杨泓,谯楷耀,阮承宗. 水波色散关系测量方法探讨[J]. 大学物理,2016,35(10):52-55.[3] Behroozi F, Perkins A . Direct measurement of the dispersion relation of capillary waves by laser interferometry [J]. American Journal of Physics, 2006,74(1):957-961.[4] Ströbel B. Demonstrati on and study of the dispersion of water waves with a computer-controlled ripple tank [J]. American Journal of Physics, 2011,79(6):581-590.[5] 钱小匀,张进治,安艳伟,等. 基于光学投影的智能化水波演示仪[J]. 物理实验,2016,36(12):12-15.[6] 欧阳丽婷,杨旭东,刘敏蔷,等. 水面驻波演示仪[J]. 物理实验,2016,36(2):26-28.[7] 吴秀芳. 水面波的几何结构及色散关系[J]. 大学物理,1989,8(11):10-14.。
不同边界条件及出境径向条件下圆柱细长体流动的数值模拟数值模拟在科学和工程领域中扮演着重要的角色,通过计算机模拟可以对各种复杂的流体力学问题进行研究和分析。
本文将讨论在不同边界条件及出境径向条件下圆柱细长体流动的数值模拟。
一、引言圆柱细长体是一种常见的工程结构,其在空气动力学、水动力学以及风工程等领域中具有重要的应用。
了解圆柱细长体在不同边界条件下的流动特性,有助于设计和优化工程结构。
二、数值模拟方法数值模拟方法是通过离散化流动域和运用数值计算方法来模拟真实流动情况的一种方法。
通常使用计算流体力学(CFD)方法进行数值模拟。
在本研究中,我们将采用有限体积法(FVM)作为数值模拟的基本方法。
三、边界条件边界条件是数值模拟中的重要考虑因素,它们可以模拟真实流动中物体与周围环境之间的相互作用。
在不同边界条件下,圆柱细长体流动的结果也会有所不同。
1. 自由流出口边界条件自由流出口条件通常用于模拟圆柱细长体在无限远处的流动情况。
在这种边界条件下,流动场中的压力和速度都按照自由流出的方式进行计算。
2. 固壁边界条件固壁边界条件用于模拟圆柱细长体表面与流体之间的接触。
在这种边界条件下,流体在圆柱表面处的速度与圆柱表面速度相同,并且流体在圆柱表面处的压力等于大气压力。
3. 流体入口边界条件流体入口边界条件用于定义流体进入计算区域的入口条件。
在这种边界条件下,可以设置不同的入口速度和入口压力,用以模拟不同流速和流态的流动情况。
四、出境径向条件出境径向条件是在数值模拟中常用的一种边界条件,用于模拟流体在离开计算区域时的流动情况。
在圆柱细长体的流动模拟中,我们可以设置出境径向条件,以模拟流体离开圆柱细长体时的流动状况。
五、数值模拟结果与讨论通过数值模拟可以得到圆柱细长体在不同边界条件及出境径向条件下的流动特性。
我们可以观察到不同边界条件和出境径向条件对圆柱细长体流动的影响。
1. 不同边界条件的影响当圆柱细长体的表面与流体之间有接触时,固壁边界条件可以很好地模拟圆柱细长体周围的流动现象。
自由边界条件壳体问题的bubble-稳定化混合有限元方法段火元
【期刊名称】《纯粹数学与应用数学》
【年(卷),期】1999(015)004
【摘要】针对自由边界条件壳体问题的经典混合变分模型发展局部bubble-函数稳定化有限元逼近方法:逐单元附加带嵌入bubble-函数的局部双线性型的稳定化法.已证明离散方程具有一致稳定性,从而经典Inf-Sup条件被避免;同时给出最优误差估计.
【总页数】7页(P12-18)
【作者】段火元
【作者单位】中国科学院计算数学与科学工程计算研究所,北京,100080
【正文语种】中文
【中图分类】O343.2;O241.82;O242.21
【相关文献】
1.二阶椭圆边值问题的一种新型稳定化非协调混合有限元方法 [J], 荆菲菲;苏剑;陈浩
2.线弹性问题局部稳定化混合有限元方法的分析 [J], 周天孝;周磊
3.自由边界条件轴对称薄圆柱壳体的混合有限元数值解 [J], 段火元
4.Bubble-函数稳定化混合有限元分析 [J], 段火元
5.具有混合边界条件的地下水污染模型的混合元——特征有限元方法 [J], 杨守志;杨晓忠
因版权原因,仅展示原文概要,查看原文内容请购买。
simlab边界条件
边界条件在有限元分析中起着至关重要的作用,它们用于模拟结构或系统的边界行为。
对于SimLab软件,边界条件可以分为几种类型,包括固支条件、位移边界条件、力边界条件和热边界条件。
固支条件用于模拟结构的支撑部分,它们阻止了结构在特定方向上的运动。
在SimLab中,可以通过选择固支边界条件来限制结构的自由度,使其在特定方向上不能移动或旋转。
位移边界条件用于指定结构或系统的特定部分的位移。
通过在SimLab中设置位移边界条件,用户可以模拟施加外部力后结构的位移响应,或者在特定部分施加位移来模拟实际工程中的情况。
力边界条件用于模拟施加在结构上的外部力或压力。
SimLab允许用户在模拟中指定施加在结构上的力的大小、方向和作用位置,从而可以准确地模拟结构在外部载荷下的响应。
热边界条件用于模拟结构或系统在温度变化下的行为。
通过在SimLab中设置热边界条件,用户可以模拟结构在不同温度条件下的热传导、热膨胀等行为。
总的来说,SimLab提供了丰富的边界条件选项,可以帮助用户准确地模拟结构或系统在不同工况下的行为。
通过合理设置边界条件,用户可以得到准确的仿真结果,从而指导工程设计和优化。
3dec动力问题的边界条件1. 引言在地质工程领域,3DEC(Distinct Element Code)是一种常用的数值模拟软件,用于模拟岩石和土壤的力学行为。
在使用3DEC进行动力问题模拟时,合理设置边界条件是确保模拟结果准确性和可靠性的关键因素之一。
本文将重点讨论3DEC动力问题的边界条件,并探讨其对模拟结果的影响。
2. 常见边界条件2.1 固定边界条件在一些情况下,岩石或土壤体受到固定约束,即不能发生位移。
这种情况下,可以将边界设置为固定边界条件。
固定边界可以通过设置节点或面元素为固定状态来实现。
2.2 自由面边界条件自由面是指没有受到约束或受到很少约束的岩石或土壤表面。
自由面常见于露天开采、挖掘工程等情况下。
在3DEC中,可以通过设置节点或面元素为自由状态来实现自由面边界条件。
2.3 周期性边界条件周期性边界常用于模拟周期性加载、振动等情况。
例如,在地震工程中,周期性加载是重要考虑因素之一。
通过设置周期性边界条件,可以模拟周期性加载或振动下的岩石或土壤响应。
3. 边界条件的设置方法3.1 通过GUI设置边界条件3DEC提供了直观的图形用户界面(GUI),可以通过该界面方便地设置边界条件。
用户可以选择节点或面元素,并在图形界面中进行相应的操作,如选择固定状态、自由状态或周期性状态。
3.2 通过脚本设置边界条件除了GUI,3DEC还支持使用脚本进行边界条件的设置。
用户可以使用脚本语言(如Python)编写相应的代码,实现自动化、批量化地设置边界条件。
4. 边界条件对模拟结果的影响4.1 固定边界条件对模拟结果的影响固定边界条件在一些情况下是合理和必要的,如岩石体受到坚固支撑时。
然而,在一些情况下,固定边界可能会对模拟结果产生不合理影响。
例如,在地震工程中,如果将所有节点都设置为固定状态,则无法准确模拟地震波传播和土体响应。
4.2 自由面边界条件对模拟结果的影响自由面是岩石或土壤表面的一种特殊边界条件。
振荡器驱动方板的有限元模型和克拉尼图形
曹磊磊;陈海峰;常博
【期刊名称】《噪声与振动控制》
【年(卷),期】2024(44)1
【摘要】振荡器驱动的方板在稳态振动时所形成的克拉尼图形(驻波节线图形)在噪声源识别和颗粒移动操控等领域得到广泛应用。
现有的对方板克拉尼图形的研究多采用实验和近似的理论分析方法。
基于参数分析建立振荡器驱动方板的简化有限元模型和适当的边界条件,进而通过固有频率和振型分析,根据振型有效质量的大小预测和再现多组实验中出现的共振频率和克拉尼图形。
对薄板在任意驱动频率下的稳态振动,通过振型叠加法快速准确计算出其振幅节线图形,与实验中相同频率下的克拉尼图形几乎相同。
振荡器驱动的方板在共振频率下的克拉尼图形可解释为固有频率对应的振型,在非共振频率下的克拉尼图形可以解释为多个振型的叠加。
通过建立具有适当边界条件的有限元模型,对振荡器驱动方板的克拉尼图形给出具有明确物理意义解释。
【总页数】8页(P104-110)
【作者】曹磊磊;陈海峰;常博
【作者单位】陕西科技大学机电工程学院
【正文语种】中文
【中图分类】O321;O326;O242.21
【相关文献】
1.压电智能板动力学有限元模型建立及振动控制(Ⅱ)——压电智能板振动控制
2.网格图形显示三维有限元模型
3.网络图形显示三维有限元模型
4.基于克拉尼图形的“音调与频率关系”创新实验
5.物理学史中的七月 1680年7月8日:启发18世纪“克拉尼图形”的早期实验
因版权原因,仅展示原文概要,查看原文内容请购买。
疲劳试验中边界条件的模拟
李清蓉
【期刊名称】《直升机技术》
【年(卷),期】2002(000)001
【摘要】本文主要以某型机上下夹板组件疲劳试验为例,阐述了疲劳试验中试验边界条件的模拟方法及其重要性.
【总页数】4页(P29-32)
【作者】李清蓉
【作者单位】中国直升机设计研究所,景德镇,333001
【正文语种】中文
【中图分类】V216.3
【相关文献】
1.CADI磨球落球疲劳试验中的应力数值模拟及失效分析 [J], 赵雪勃;彭云成;杨兆禹;刘金海;焦永树;李国禄;阎殿然
2.瑞雷波数值模拟中的边界条件及模拟实例分析 [J], 熊章强;张大洲;秦臻;周文斌
3.波动数值模拟中的外推型人工边界条件 [J], 邢浩洁;李小军;刘爱文;李鸿晶;周正华;陈苏
4.弹性波数值模拟中的高斯型混合吸收边界条件及其GPU并行 [J], 王绍文;宋鹏;谭军;解闯;毛士博;王倩倩
5.不同内边界条件下SEP事件实例的集合数值模拟及其在SEP事件预报中的应用[J], 杜晨曦;敖先志;罗冰显;王晶晶;李刚
因版权原因,仅展示原文概要,查看原文内容请购买。
简论开口边界条件
何吉欢
【期刊名称】《上海大学学报(自然科学版)》
【年(卷),期】1998(000)002
【摘要】在实际计算时,流体的求解域往往是有很限的,这样就存在一个开口边
界条件问题。
Papanastasiuou提出了自由边界条件或称无边界条件,很好地解决了形口边界问题,本文将在现有文献的基础上,进一步阐述了边界条件及其实质。
【总页数】1页(P213)
【作者】何吉欢
【作者单位】上海市应用数学和力学研究所
【正文语种】中文
【中图分类】O351
【相关文献】
1.任意边界条件下中心开口矩形板自由振动特性分析 [J], 邱永康;李天匀;朱翔;郭
文杰;毛艺达
2.采用第一类边界条件数值模拟具有开口的大空间建筑室内速度场与温度场 [J],
黄晨;李美玲;左涛;叶剑军
3.声波正演中一种新的边界条件--双重吸收边界条件 [J], 李文杰;魏修成;刘洋
4.如何让农村初中的学生敢开口、想开口说英语 [J], 谢成兰
5.Monte Carlo统计力学的一种新型边界条件—随机边界条件 [J], 张红东;陆建明;杨玉良
因版权原因,仅展示原文概要,查看原文内容请购买。
力学课堂中拉压杆变形数值模拟案例在力学课堂中,拉压杆的变形是一个非常重要的概念。
它可以帮助学生更好地理解杆件在力作用下的变形以及力的分布情况,从而更好地解决相关问题。
为了加深同学们对这一概念的理解,以下是一个拉压杆变形数值模拟案例。
拉压杆是一种常见的机械装置,它的分布在各个机械装置中。
在杆件受力作用下,会发生形变,这种形变一般分为拉伸和压缩两种。
下面我们以一根钢杆为例,构建一个数值模拟来分析它在受外界力的作用下的变形情况。
假设钢杆的形状为一个圆柱体,直径为1cm,长度为10cm。
为了简化问题,我们假设钢杆的杨氏模量为210Gpa,泊松比为0.3。
杆件上的外力是一个垂直于钢杆的静力负载,大小为1N。
首先,我们需要确定杆件的初始状态。
在初始状态下,钢杆的直径为1cm,长度为10cm,没有受到外力作用,因此在拉压杆变形时,我们需要将这些参数输入到计算机中。
接下来,我们需要在计算机中使用有限元分析方法来计算杆件的应力分布情况。
有限元分析是一种常用的数值计算方法,它可以将物体划分成若干个小元件,然后逐一计算每个小元件上的应力和变形情况,最终得出物体的整体应力和变形情况。
在松弛应力后,模型发生的位移被用于重定位施加的载荷点。
施加死载的节点通常作为边界条件之一,位移约束的节点通常作为边界条件之二。
约束的节点可能会阻碍所有的轴向位移,或者使节点上的轴向位移与与之相邻的节点相同。
最后,通过选择适当的材料特性,使用该模型可以计算杆件变形后的应力分布情况。
应用有限元分析,可以得到杆件受力后的应变和位移分布情况。
然后,我们可以将这些数据输入到计算机辅助设计软件中进行模拟。
模拟可以帮助学生更加直观地了解受力后,杆件发生的形变情况和应力分布情况。
这样可以帮助学生更好地理解拉压杆变形的本质和机制,这有助于他们解决相关问题。
假设我们得到了一张拉压杆在受到外力作用下,底部弯曲的变形示意图。
从图中我们可以看到,一开始杆件几乎没有发生变形,但是随着外力的逐渐加大,钢杆开始产生弯曲,形成了一个弧形。
课程设计
题目:自由边界条件下克拉尼图形的模拟
学院:物理工程学院
姓名:文美乐
专业:应用物理1203班
学号:121410020322
t=0:pi/20:4*pi; %0到4pi,每隔Pi/20取一个数
x=0:0.1*pi:4*pi; %0到4pi,每次增加0.1pi
m=moviein(40); %定义一个40列的矩阵m,以存储40帧画面,每列对应一帧画面for i=1:40;
y=sin(x+t(i));
plot(x,y ,'o');
m(:,i)=getframe; %依次将40帧画面存入矩阵m
end
movie(m,10,20) %将40帧画面演示10次,每秒20帧画面
图形:
t=0:pi/20:4*pi; %0到4pi,每隔Pi/20取一个数
x=0:0.1*pi:4*pi; %0到4pi,每次增加0.1pi
m=moviein(40); %定义一个40列的矩阵m,以存储40帧画面,每列对应一帧画面for i=1:40 ;
y1=sin(x+t(i));
y2=sin(x-t(i));
y=y1+y2;%两列行波叠加
plot(x,y1,x,y2,x,y);
m(:,i)=getframe; %依次将40帧画面存入矩阵m
end
movie(m,10,20) %将40帧画面演示10次,每秒20帧画面
图形:
t=[0:pi/20:4*pi];%0到4*pi,每隔pi/20取一个数
x=[0:0.1*pi:4*pi];%0到4*pi,每次增加0.1*pi
y=x;
[X,Y]=meshgrid(x,y);%定义数组x,y,
m=moviein(40); %定义一个40列的矩阵m,以存储40帧画面,每列对应一帧画面for i=1:40 ;
Z=sin(X+t(i))+sin(X-t(i));%定义z函数
mesh(X,Y,Z);%画三维图
m(:,i)=getframe; %依次将40帧画面存入矩阵m
end
movie(m,10,20) %将40帧画面演示10次,每秒20帧画面
图形:
双原子
clear;clc %清除窗口
A=[1,-1;-1,1];
[w,v]=eig(A) %矩阵A的特征值w,特征向量v
t=[0:pi/20:2*pi]; %0到2pi,每隔Pi/20取一个数
z1=w(1)*cos(v(4)*t); %第一个小球的位移
z2=w(4)*cos(v(4)*t); %第二个小球的位移
figure;
hold on;
box on;
r = 0.1; %小球半径
xr1 = r*cos(t)+0.2; yr1 = r*sin(t)+z1(1); %第一个小球xr2 = r*cos(t)-0.2; yr2 = r*sin(t)+z2(1); %第二个小球hb1 = fill(xr1, yr1, 'r'); %绘制第一个小球
hb2 = fill(xr2, yr2, 'y'); %绘制第二个小球
axis([-1 7 -1.2 1.2]); %坐标轴范围设置
axis equal; %坐标轴属性设置
for i = 1 : length(t)
set(hb1,'YData',r*sin(t)+z1(i)) ;
%移动第一个小球
set(hb2,'YData',r*sin(t)+z2(i));
% 移动第二个小球
pause(0.05);%延时播放
end
图形:
十原子运动
clc;
clear all;
A=[1 -1 0 0 0 0 0 0 0 0;-1 2 -1 0 0 0 0 0 0 0;0 -1 2 -1 0 0 0 0 0 0;0 0 -1 2 -1 0 0 0 0 0;0 0 0 -1 2 -1 0 0 0 0;0 0 0 0 -1 2 -1 0 0 0;0 0 0 0 0 -1 2 -1 0 0;0 0 0 0 0 0 -1 2 -1 0;0 0 0 0 0 0 0 -1 2 -1;0 0 0 0 0 0 0 0 -1 1];
[W,V]=eig(A) %矩阵A的特征值w,特征向量v
lin=5;
w1=(W(1,lin));
w2=(W(2,lin));
w3=(W(3,lin));
w4=(W(4,lin));
w5=(W(5,lin));
w6=(W(6,lin));
w7=(W(7,lin));
w8=(W(8,lin));
w9=(W(9,lin));
w10=(W(10,lin)); %振幅w
v1=sqrt(V(1,1));
v2=sqrt(V(2,2));
v3=sqrt(V(3,3));
v4=sqrt(V(4,4));
v5=sqrt(V(5,5));
v6=sqrt(V(6,6));
v7=sqrt(V(7,7));
v8=sqrt(V(8,8));
v9=sqrt(V(9,9));
v10=sqrt(V(10,10)); %频率v
t=linspace(0,2*pi);
z1=w1*cos(v10*t);
z2=w2*cos(v10*t);
z3=w3*cos(v10*t);
z4=w4*cos(v10*t);
z5=w5*cos(v10*t);
z6=w6*cos(v10*t);
z7=w7*cos(v10*t);
z8=w8*cos(v10*t);
z9=w9*cos(v10*t);
z10=w10*cos(v10*t); %十个小球分别的位移
figure;
hold on;
box on;
r=0.1;
xr1=r*cos(t)-1.8;yr1=r*sin(t)+t(1);
xr2=r*cos(t)-1.4;yr2=r*sin(t)+t(1);
xr3=r*cos(t)-1.0;yr3=r*sin(t)+t(1);
xr4=r*cos(t)-0.6;yr4=r*sin(t)+t(1);
xr5=r*cos(t)-0.2;yr5=r*sin(t)+t(1);
xr6=r*cos(t)+0.2;yr6=r*sin(t)+t(1);
xr7=r*cos(t)+0.6;yr7=r*sin(t)+t(1);
xr8=r*cos(t)+1;yr8=r*sin(t)+t(1);
xr9=r*cos(t)+1.4;yr9=r*sin(t)+t(1);
xr10=r*cos(t)+1.8;yr10=r*sin(t)+t(1); %十个小球分别得初始位置hb1=fill(xr1,yr1,'r');
hb2=fill(xr2,yr2,'r');
hb3=fill(xr3,yr3,'r')
hb4=fill(xr4,yr4,'r')
hb5=fill(xr5,yr5,'r');
hb6=fill(xr6,yr6,'r');
hb7=fill(xr7,yr7,'r');
hb8=fill(xr8,yr8,'r');
hb9=fill(xr9,yr9,'r');
hb10=fill(xr10,yr10,'r'); %十个小球分别得初始位置绘图axis([-3 4 -1 1]) %坐标轴范围设置
axis equal; %坐标轴属性设置
for i=1:length(t)
set(hb1,'Ydata',r*sin(t)+z1(i));
set(hb2,'Ydata',r*sin(t)+z2(i));
set(hb3,'Ydata',r*sin(t)+z3(i));
set(hb4,'Ydata',r*sin(t)+z4(i));
set(hb5,'Ydata',r*sin(t)+z5(i));
set(hb6,'Ydata',r*sin(t)+z6(i));
set(hb7,'Ydata',r*sin(t)+z7(i));
set(hb8,'Ydata',r*sin(t)+z8(i));
set(hb9,'Ydata',r*sin(t)+z9(i));
set(hb10,'Ydata',r*sin(t)+z10(i));
pause(0.1); %延时播放
end
频率为5的图像:
频率为6的图像:。