“低慢小”目标的光电与雷达复合探测跟踪方法
- 格式:docx
- 大小:29.26 KB
- 文档页数:4

制导雷达探测跟踪“低慢小”目标问题简析
苏垣生;薛晓峰;谢巧平;高兵
【期刊名称】《地面防空武器》
【年(卷),期】2011(042)003
【摘要】在分析低慢小目标对制导雷达探测、跟踪能力的基础上,根据雷达系统的功能组成,提出改进处理方法为完成抗击低空慢速小目标的防空作战任务提供决策建议.
【总页数】2页(P24-25)
【作者】苏垣生;薛晓峰;谢巧平;高兵
【作者单位】空军指挥学院;空军指挥学院;空军指挥学院战术教研室;空军指挥学院战术教研室
【正文语种】中文
【相关文献】
1.低慢小目标雷达探测技术研究
2.关于采用粒子滤波器检测跟踪低小慢目标的研究
3.跟踪低慢小目标高精度方位测角方法的研究
4."低慢小"目标定位跟踪算法研究
5.光电转塔自动搜索跟踪监视低小慢目标控制方法
因版权原因,仅展示原文概要,查看原文内容请购买。

• 159•裂纹是由塑性变形的累积造成的,从图2和图3可以看出,在536s 左右,加载的间隙出现了明显的声发射信号,最大幅值达到71dB ,并且在此后的实验过程中,越来越多的声发射信号出现在加载间隔的时间内,在时间轴上越来越密,信号的计数值和持续时间开始递增,说明机匣在塑性变形的累积下开始产生较为严重的损伤,微观裂纹开始萌生。
图4 绝对能量和累计绝对能量在762s 以后,实验采集的声发射撞击信号的计数值和持续时间都有了明显下降,说明此时机匣加载的声发射活动量减少,进入加工硬化阶段。
此阶段出现了少量高幅值的信号,与大部分撞击点分离,并且具有很高的绝对能量。
从762s 至1175s ,随着载荷的增加,累积绝对能量近似呈指数上升,见图4,在此阶段内,机匣材料内部的微观裂纹开始扩展,释放了大量的能量,最终在1175s左右出现断裂。
图5 持续时间随时间变化曲线4.总结对静载试验下的钛合金机匣进行了声发射监测,采用经历图分析法分析了不同损伤程度的声发射参数特征。
在弹性变形阶段几乎不产生声发射,塑性变形阶段的声发射活动量较大,且具有高振铃计数和高幅值,但绝对能量较小。
加工硬化及断裂阶段的声发射活动量减少,信号的计数和持续时间较小,但有绝对能量和幅值很大的信号产生。
机匣不同损伤阶段的声发射信号特征表明,声发射技术可以有效地监测钛合金构件的损伤情况。
现代战争中,小型低空飞行器因其具有飞行高度较低、小巧灵活以及良好的隐蔽性等多种优势特性,故而得到了相对广泛的运用。
该类目标具有低空慢速的特性。
因此本文以小型低空飞行器为研究对象,对低空慢速目标检测、跟踪方法以及数据处理进行简要分析。
引言:低空环境具有较多的地物杂波,特别是在高层建筑环境下,其产生的回波极有可能掩盖待测目标回波,加之受到较强的多径效应影响,进而导致低空目标检测与实时跟踪难度较大。
探究低空慢速目标检测与跟踪方法及数据处理方式,可有效提高小型低空飞行器的目标检测与跟踪成效、优化相关数据处理结果等。
Electronic Technology •电子技术Electronic Technology & Software Engineering 电子技术与软件工程• 101【关键词】圆形阵列 低慢小目标 跟踪加搜索1 绪论低空慢速小目标是对低空或超低空飞行、速度较慢等特征的各种小型飞行器和空漂物的统称(以下简称为“低慢小”目标)。
如何防范“低慢小”目标的干扰破坏,是重大活动安保的难题之一。
解决“低慢小”航空器探测问题的途径主要有三种:声学探测、光电探测(可见光、激光、红外)和雷达探测。
由于小型飞行器的噪声与周围环境噪声相比非常小,这就使得声学探测的距离会很近;又由于小型飞行器的动力系统红外辐射特征低,使得红外探测手段较难发现。
雷达探测难点表现在目标所处城市背景复杂、目标的速度慢、目标飞行的高度低、容易被强地物杂波和强噪声所淹没,导致雷达回波信号的信杂比或信噪比低,影响雷达的检测性能。
针对上述问题,本文介绍一种新体制圆阵雷达用于“低慢小”目标探测。
2 圆阵雷达介绍目前相控阵雷达天线基本上是平面阵列形式。
平面阵列天线存在着一些缺点,例如,波束扫描范围窄,天线单元驻波随扫描角增大而变化,难以实现宽角扫描匹配,天线副瓣电平也往往随扫描角增大而提高。
与传统的平面相控阵相比,圆阵列具有良好的全方位扫描能力。
圆阵列可简单而灵活地操控波控的方位,其增益和方向图等性能基本不变。
同时,圆结构的对称性保持了单元间的互耦平衡,利于实际工程设计。
本文介绍的圆阵雷达用来探测低空慢速飞行小目标,同时获取所探测到目标的距离、方位、仰角和速度等信息。
下面论述圆阵雷达在低小慢目标探测方面的独特优势。
2.1 搜跟合一技术传统的机械扫描雷达跟踪目标往往会选择TWS 跟踪技术。
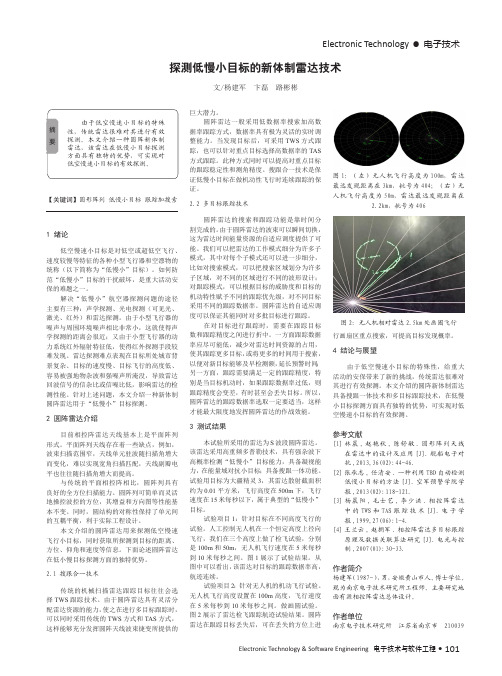
由于圆阵雷达具有灵活分配雷达资源的能力,使之在进行多目标跟踪时,可以同时采用传统的TWS 方式和TAS 方式,这样能够充分发挥圆阵天线波束捷变所提供的探测低慢小目标的新体制雷达技术文/杨建军 卞磊 路彬彬巨大潜力。

低空慢速小目标探测与定位技术研究作者:李菠孟立凡李晶刘春美黄广炎来源:《中国测试》2016年第12期摘要:城市大型集会、活动中安保工作的一大主要任务是防止恐怖分子利用航模等低空慢速小型飞行器进行破坏活动,由于城市环境的复杂性以及低空慢速小目标(以下简称“低慢小”)的特殊性,像雷达等传统的探测方法很难准确探测定位。
针对这一难题,设计基于激光探测技术的低慢小探测与定位系统。
系统包含激光脉冲发射、雪崩光电二极管偏置、弱光信号处理和计时电路等主要结构。
利用标准时基发生器对计时电路进行验证,采用线性拟合方法使时间测量的精度达到10-10量级。
经过试验测试,该系统能够在近距离范围内对低慢小进行快速定位,0~100 m距离范围内测距误差为±0.6 m;0~60 m高度范围内测高误差为±0.6 m;0~35 km/h速度范围内测速误差为±1.3 km/h。
关键词:低慢小目标;城市环境;激光探测技术;微弱光电信号处理文献标志码:A 文章编号:1674-5124(2016)12-0064-060 引言低空慢速小目标(以下简称“低慢小”),是指具有低空飞行、飞行速度慢、不易被侦测发现等特征的小型航空器和空飘物的统称[1]。
目前见到的低慢小主要包括航空模型、航天模型、热气飞艇、热气球等。
低慢小由于体积小、操作简单、飞行高度低、地物遮挡多,空军和雷达设备无法覆盖,防范处置低慢小的干扰破坏,已成为重大安保活动的世界性难题,突出表现为管控难、侦测难、处置难[2-3]。
对于低慢小目标的探测,国内外运用了各种技术手段。
航天科工集团采用光电探测技术对低慢小目标进行探测,主要利用红外自动搜索技术对低慢小进行自动搜索,再利用智能图像处理和高精度转台控制技术实现对目标的自动跟踪,同时利用激光测距仪可对目标进行实时定位。
日本Alsok公司,开发出了“音频指纹”探测技术,该技术通过对无人机螺旋桨的旋转声音进行探测。
传统雷达通常探测高空快速大目标(简称高大快目标),而对低空慢速小目标(简称低慢小目标)无法有效探测,进而无法对低空安全做出有效防范。
低慢小目标通常包括:鸟类、无人机、航模、热气球、滑翔伞等等。
鸟击航班一直都是航空飞行安全的一大隐患,对机场近空鸟类的防范关系到飞行器与司乘人员的生命安全。
近年来随着消费级无人机技术的成熟与成本下降,小型无人机异常活跃,给社会经济与人们生活带来便利的同时也深深的威胁着低空的安全。
低慢小目标探测雷达应运而生,在一定范围内及时发现低慢小飞行目标并且采取相应的处置手段,维护低空空域的安全。
鸟击是指航空器在起降或飞行过程中与鸟类、蝙蝠等动物相撞的事件,或者是因为动物活动影响到正常飞行活动的事件。
据统计,仅北美地区每年鸟击所造成的军用和民用航空经济损失就超过5亿美元,欧洲每万次飞机起降平均有5.7次鸟击,严重的鸟击事件甚至可能威胁到乘客的生命安全。
根据民航总局发布的《2012年度中国民航鸟击航空器信息分析报告》,中国全行业共发生2553起鸟击事件,其中事故征候148起,占全部事故征候总数的55%;发生在机场责任范围内的鸟击事件429起,共涉及85家机场,带来的经济损失为1.87亿元人民币,主要来自机械维修和航线运营方面的不完全统计数据,不包括航班取消、延误等引起的间接损失。
鸟击分析报告显示,飞机最易遭受鸟击的部位为发动机;起飞、爬升、进近、着陆等低高度阶段为鸟击多发阶段,占确定鸟击飞行阶段报告的86%,其中0~100米发生的鸟击事件超过半数;春秋季为鸟击事件高发季节,夜晚及晨昏的低能见度条件下为鸟击事件高发时段;华东、中南和西南地区为我国鸟击事件高发区域。
目前,我国民航的鸟情观测手段仍非常有限,基本停留在人工处理阶段,但在目测困难的黎明、黄昏和夜晚,恰恰是鸟击事件的高发期,迫切需要相关技术手段的支持来辅助开展驱鸟工作。
探鸟雷达系统的优点在于不受能见度和恶劣天气等因素的限制,能够全天候自动运行,与常规鸟类活动监测方法相比,具有速度快、灵敏度高、全天候、自动化、监测面积大、适用范围广等优点,具有非常好的市场发展前景。
第51卷 第3期 激光与红外Vol.51,No.3 2021年3月 LASER & INFRAREDMarch,2021 文章编号:1001 5078(2021)03 0343 06·光电技术与系统·光电转塔自动搜索跟踪监视低小慢目标控制方法张龙浩,陈国强,徐 梁,沈 腾,程庆敏(中国航空工业集团公司洛阳电光设备研究所,河南洛阳,471000)摘 要:对低小慢目标的自动搜索跟踪监视具有重要的意义,针对目前对光电探测低小慢目标自动化程度低的问题,提出一种对低小慢目标实现全自动搜索跟踪监视的光电转塔控制方法。
在雷达系统发现低小慢目标并给出目标的预测地理位置后,光电转塔内的传感器自动控制系统会自动控制可见光传感器和红外传感器视场将目标以合适的大小显示在图像中,并且自动调焦使目标清晰;光电转塔运动自动控制系统会控制转塔对准目标预测点,控制图像处理器检出低小慢目标,将目标拉到图像中心显示、持续跟踪并识别。
试验结果表明该方法可以在多种天气条件下全自动实现对多种低小慢目标发现、自动跟踪监视、识别,实现了系统全自动化工作。
关键词:低小慢目标;光电转塔;自动控制系统;光电探测;红外小目标中图分类号:TP273 文献标识码:A DOI:10.3969/j.issn.1001 5078.2021.03.015Thecontrolmethodofelectro opticalsystemforautomaticsearching,trackingandmonitoringlow smallandslowtargetsZHANGLong hao,CHENGGuo qiang,XULiang,SHENTeng,CHENGQing min(LuoyangElectro opticalEquipmentResearchInstituteofAVIC,Luoyang471000,China)Abstract:Searchingtrackingandmonitoringoflow smallandslowtargetsautomaticallyhasimportantsignificance.Asthelevelofautomationoflow smallandslowtargetsphotoelectricdetectionnowislow,akindofnewautomaticcontrolmethodisprovided.Aftertheradarsystemfindsthetargetandgivesitspredictedgeographiclocation,thesensorauto maticcontrolsystemintheelectro opticalsystemwillautomaticallycontroltheviewfieldofvisiblelightsensorandin fraredsensortodisplaythetargetsintheimageatanappropriatesize,anditwillalsoautofocusandmakethetargetclear;themovementautomaticcontrolsystemoftheelectro opticalsystemwillcontroltheturrettoautomaticallyaimatthetargetpredictionpoint,controlimageprocessordetectiontargets,andpullthetargettothecenteroftheimagefordisplay,continuoustrackingandrecognition.Thetestsresultsshowthatthecontrolmethodcandiscover,trackandmo nitorvariouslow smallandslowtargetsundervariousweatherconditions,andworkfullyautomatically.Keywords:low smallandslowtarget;electro opticalsystem;automaticcontrolsystem;photoelectricdetection;infraredsmalltarget作者简介:张龙浩(1988-),男,硕士,工程师,主要从事光电吊舱控制技术的研究。
“低慢小”目标的光电与雷达复合探测
跟踪方法
摘要:光电跟踪系统的研究多偏于对图像检测算法的提升,奚玉鼎提出一种
快速搜索控制“低慢小”目标的光电系统,该系统利用相机采集图像,经过图像
处理检测算法实现“低慢小”目标的搜索探测。
通过可见光和红外图像的有效融
合来检测“低慢小”,提出了一种基于一维信息熵和加权平均的ROI提取模块,
减少背景信息的干扰;其次,利用局部SuBSENSE方法进行局部背景建模,完成“低慢小”目标的精确检测。
以上研究,大多都集中在目标检测跟踪研究,重点
多偏于算法提升,较少涉及搜索跟踪切换关键环节。
雷达系统和光电系统各有优
缺点,对于一套完整的“低慢小”探测跟踪系统,雷达主要负责目标探测,其探
测距离和探测范围指标均优于光电系统。
而从目标定位精度上来说,雷达系统的
精度在度级,而光电系统的精度在微弧度级。
雷达有近距离盲区,无法对近距离
目标进行探测,此时光电跟踪系统可以弥补雷达探测盲区。
雷达仅获取目标的位
置信息,以及目标移动速度信息,SAR成像周期较长,而光电系统能够实时获得
目标的可视化图像和视频信息,同时光电系统跟踪时可利用雷达探测的目标距离
信息进行焦距调节。
单台雷达对目标的位置测量,其距离与角度上的系统偏差对
于所有的目标都相同,所以对跟踪系统的性能不会造成较大的影响和提升。
本文
主要分析“低慢小”目标的雷达与光电复合探测跟踪方法。
关键词:低慢小;脉冲多普勒雷达;光电;数据配准;扩展卡尔曼
引言
“低慢小”目标是指较低空域飞行,较慢飞行速度,且外形特性小(不易被
发现)的飞行器与悬空物。
常见的“低慢小”目标有多旋翼无人机,固定翼轻型
飞机,热气球等。
由于“低慢小”目标体积小,机动性强,具有一定载弹能力,
很容易对机场,油田等有关国防、民生的重要的设施构成威胁,所以对“低慢小”目标进行全天时,全天候探测与防范有着重要意义和价值。
基于雷达的“低慢小”
目标探测研究通常是基于检测算法的提升进而检测能力,针对强杂波环境下的小目标被杂波淹没的情况,利用小波变换和主成分分解可以实现雷达小目标信号与杂波信号的分离,从而达到杂波抑制和小目标检测的目的。
脉冲多普勒雷达在相同条件下CFAR和CNN的检测结果,具有更优的检测性能。
以上研究都是针对单雷达系统对于“低慢小”目标搜索模式下,提高检测能力,但由于雷达系统测角能力低,且难以探测目标的轮廓特征和种类,因此较难满足实际复杂背景下的“低慢小”目标探测与跟踪能力。
1、复合探测跟踪平台组成
复合探测跟踪平台由雷达和光电系统组成。
由于“低慢小”目标低空、慢速的运动特点,探测系统需要同时具备较高距离的分辨率及较大的探测距离,雷达面临的问题有目标飞行高度低,地面回波强,地表特征较为复杂,对于雷达需实现在较低信杂比背景下实现强杂波抑制,并且采用自适应CFAR检测算法检测出目标,同时使用单脉冲测角实现对目标空间坐标的测量。
脉冲多普勒雷达是基于运动目标多普勒效应探测目标相对运动速度的全相参体制雷达,可全天候探测目标,实时更新目标位置信息及速度等信息,并且脉冲多普勒雷达同时具备宽脉冲雷达较高的距离分辨率和窄脉冲雷达较高的速度分辨率。
光电跟踪系统内有长焦的高清可见光传感器和长焦的制冷型红外传感器两种传感器,具有昼夜间成像功能,可通过可见光传感器与红外传感器采集目标的图像,结合智能跟踪决策及算法设计,进行目标跟踪与识别,得到目标在图像中心水平和垂直上的像素距离,即脱靶量。
根据目标在图像中心的角度以及像素点大小可以换算成目标的方位和俯仰角的偏差,同时根据转台内的惯性姿态测量单元及伺服控制系统可得到目标的绝对位置。
“低慢小”目标的运动对雷达回波的功率调制主要体现在目标时间序列上,可以从目标的起伏变化规律中提取目标的姿态变化和运动情况。
全息雷达的连续探测和高数据率特点,使得目标的运动特征可以获取得更为精细,从而可以提取运动特征并进行目标分类识别。
2、基于移动通信信号的“低慢小”目标定位技术要点
2.1复合探测配准算法
雷达与光电复合探测系统实现的主要流程:雷达扫描探测到目标后,将目标
位置信息配准到光电系统下,光电系统指向该目标所在方向,实现目标跟踪与锁定,此时光电系统与雷达跟踪同一目标,雷达系统与光电系统探测目标数据进行
时间配准。
雷达作为具有主动探测能力的系统,为提高整体探测系统的隐蔽性,
雷达可为光电跟踪系统提供间歇性的辅助,利用雷达的远距离探测能力,为光电
提供预警引导功能,实现目标的高效探测与跟踪。
该模式的基本思路:通过功耗
较大,误差较大,探测距离较远的雷达牵引功耗较小,精度较高、探测距离较短
的光电,资源消耗大的雷达间歇牵引功耗较小的光电,从而提高系统的整体探测
效率与跟踪精度。
当雷达与光电系统对目标同时跟踪模式下,当光电系统探测到
目标后,以合适的大小显示在图像中,雷达探测到目标的距离可用于光电自动调焦,从而提高光电系统对目标的跟踪能力,在雷达系统与光电系统的复合探测跟
踪下,光电的跟踪能力明显提高,同时能提高对目标的跟踪时间,降低跟踪丢失
的概率。
目前脉冲多普勒雷达可以对探测范围内的目标进行自动跟踪,但是雷达
无法探测到目标的种类和外形等目标外部特征。
目前许多“低慢小”的光电探测
系统依赖与手动搜索,自动化程度较低,无法实现无人化的监视等,雷达与光电
复合探测跟踪能实现搜索、跟踪和识别。
2.2时差定位技术
时差定位技术主要是借助多个移动通信基站,结合信号时间差作为定位评估
证据,其技术原理是借助信号观测站形成的曲线交点知晓航飞位置,此时能够准
确排除空间措施为止,从二维空间逐渐上升为三维空间。
为了保证此项技术形成
的时间差数据具有参考性,应设有四个以上的信号接收站,由此在曲面覆盖范围
内获取信号值。
于时差定位技术导向下需要选取适宜的基站分布方式。
其中较为
常见的有平行四边形以及星形、菱形分布形式。
为了验证时差定位技术下与之匹
配的基站布局,可以采用对比实验仿真设计法,对不同基站分布结果予以统计,
从而确认最佳基站分布方式。
首先,在该实验中可以设计10km的基站间距,而
后从中分析基站位置的调整是否影响定位准确性。
结合相关研究推断出:若“低
慢小”目标朝着背向基站的方向航飞,会在航飞距离延长时,出现精度下降情况,在星形基站分布格局下,基本上无模糊定位区域。
而在菱形场景下,因部分基站
与定位对象的距离存在差异性。
所以,极易在横纵轴15°与45°范围内呈现高
精度定位趋势,而局部区域会明显面临定位不准风险。
若按照平行四边形方式布
设基站,因其与上述菱形存在相似性,且最终测定的仿真结果也相差无几,自此
确定星形布设基站的方式可行性更强。
出于对“低慢小”目标位置的精准确认,
需要按照星形布设基站,而且也要对定位技术进行深层次分析,搭配定位软件,
直观的呈现各点位数据信息,继而达成可视化高精度定位目的。
结束语
本文提出雷达与光电系统复合探测“低慢小”目标的方法,先利用雷达系统
做大范围扫描,在获取目标位置信息后,与光电系统进行空间和时间的配准,其
中空间配准利用四元数法对目标坐标变换的实现,时间配准引入最常见的最小二
乘法,通过加权得到目标数据,多传感器的综合将得到目标更完整的信息,将每
个传感器的系统偏差来源逐一分析,尽可能消除其偏差,否则将产生虚警目标,
从而影响最终系统的决策稳定性。
最后利用光电系统高效地实现对目标的精确跟
踪并获取可视化的图像和视频信息,辅助目标识别。
“低慢小”目标机动性强,
传统的滤波算法仅针对一个运动模型,而“低慢小”目标运动状态并不是单一的,故提出了基于扩展卡尔曼的交互多模型算法(EKF-IMM)。
参考文献:
[1]张龙浩,陈国强,徐梁,沈腾,程庆敏.光电转塔自动搜索跟踪监视低小慢目
标控制方法[J].激光与红外,2021,51(3):343-348.
[2]赵晨帆,王萍,邢冠培,叶舟,王锦.卷积神经网络应用于雷达目标检测[J].
导弹与航天运载技术,2020(6):84-90.
[3]奚玉鼎,于涌,丁媛媛,李岩,唐正宏.一种基于低空全景图像的低慢小目标
检测方法[J].工业控制计算机,2018,31(5):66-68.
[4]王维佳,柏鹏,梁晓龙,张佳强.雷达辅助光电跟踪系统协同跟踪算法[J].
红外与激光工程,2017,46(12):209-215.
[5]刘芳,杨安喆,吴志威.基于自适应Siamese网络的无人机目标跟踪算法[J].航空学报,2020,41(1):248-260.。