曲柄滑块机构的概率设计及精度综合
- 格式:pdf
- 大小:227.59 KB
- 文档页数:2
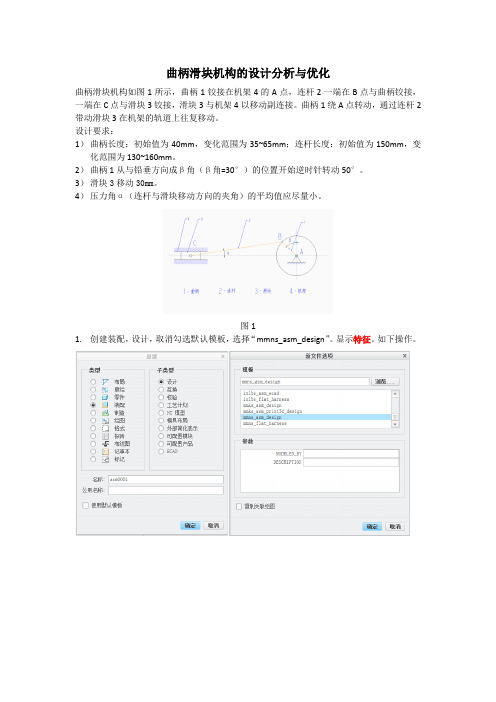
曲柄滑块机构的设计分析与优化曲柄滑块机构如图1所示,曲柄1铰接在机架4的A点,连杆2一端在B点与曲柄铰接,一端在C点与滑块3铰接,滑块3与机架4以移动副连接。
曲柄1绕A点转动,通过连杆2带动滑块3在机架的轨道上往复移动。
设计要求:1)曲柄长度:初始值为40mm,变化范围为35~65mm;连杆长度:初始值为150mm,变化范围为130~160mm。
2)曲柄1从与铅垂方向成β角(β角=30°)的位置开始逆时针转动50°。
3)滑块3移动30mm。
4)压力角α(连杆与滑块移动方向的夹角)的平均值应尽量小。
图11.创建装配,设计,取消勾选默认模板,选择“mmns_asm_design”。
显示特征。
如下操作。
2.添加参数。
主菜单:工具》参数。
添加参数:曲柄长40.连杆长150.如下所示3.创建元件。
名字为gujiamoxing。
按如下设置。
4.激活骨架模型。
模型树GUJIAMOXING.ASM右击,选择激活。
如下图5.设置收缩包络及隐藏工作面。
单击模型》收缩包络。
单击参照》包括基准。
按住ctrl键选中三个坐标面,确定如下。
退出后,在模型树同时选中三个平面,右击,单击隐藏工作平面(此工作平面属于组件)。
结果如下。
6.进行如下草绘。
草绘放置在front平面,参考:right平面,方向:右(在工作区选择平面)。
(此坐标平面属于骨架模型,与上面不同)。
选择top面为参照后关闭参照对话框,进行草绘。
7.激活窗口,添加关系。
视图》激活。
工具》关系。
按如下添加关系。
查找范围栏选择特征,后面选择草绘。
参数栏添加下列参数:曲柄长,0;连杆长,0;关系栏单击视图中的尺寸进行添加:d5=曲柄长:1*2;d4=连杆长:18.激活模型树及创建机架元件。
右击激活;创建元件,命名BODY_SKEL_JIJIA,按如下操作进行;在链框中选择草绘中的机架线,如下图所示。
单击确定。
再确定退出。
模型树生成BODY_SKEL_JIJIA_PART项。
曲柄滑块机构的运动精度分析与计算宋亮;赵鹏兵【摘要】曲柄滑块机构是一种典型的四连杆机构,尽管设计时理论计算可以达到很高的精度,但是由于构件的制造误差及运动副的配合间隙等因素,会使机构在运动中产生输出误差,有时还会显著超出机构设计的允许误差.依据概率统计的相关理论进行机构设计,即考虑构件制造尺寸的随机误差,以保证机构运动的精度在允许的误差范围内.利用MATLAB进行仿真计算和实例研究,得出了理论设计和精度分析的计算结果.该方法准确、效率高、而且适合其它类型的机构设计,具有较大的工程实际应用价值.%Slider-crank mechanism is a typical four-bar linkage, in spite of the high precision when it' s calculated theoretically. The manufacturing error and kinematic pair clearance of the components will lead to the output error during the motion of the mechanism. Sometimes,it will significantly exceed the tolerance of the design. According to the probability and statistics theory, the mechanism is designed, that' s considering the random error of the component to make sure that the motion accuracy is in the allowed error range. Utilizing MATLAB to simulate and calculate based on case studies. and the theoretical design and accuracy analysis are obtained. This method is accurate and very efficiently, it also can be used in other kind of mechanism design, and it has much more practical value in engineering.【期刊名称】《科学技术与工程》【年(卷),期】2011(011)010【总页数】5页(P2201-2205)【关键词】曲柄滑块机构;运动学;概率设计;等影响法;精度分析【作者】宋亮;赵鹏兵【作者单位】海军装备部,西安,710043;西北工业大学现代设计与集成制造技术教育部重点实验室,西安,710072【正文语种】中文【中图分类】TH112.1曲柄滑块机构是一种单移动副的四连杆机构,如图1和图2所示,分别为对心和偏心曲柄滑块机构。

曲柄滑块机构的设计页 HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】本篇再考察一道曲柄滑块机构的设计。
同样是给定行程速比系数来确定杆长。
设计一偏置曲柄滑块机构,已知滑块的行程速比系数为,滑块的行程50 ,导路的偏距20 ,求曲柄和连杆长度,并求其最大压力角。
问题分析首先设计机构,然后再求最大压力角。
机构的设计。
先计算出行程速比系数如下那么根据题意,最后的结果应当如下图。
滑块的两个极位之间距离是50mm,而固定铰链A在与CD平行20mm的直线上,而且A点到C,D的夹角是36度。
图解总是从已知条件开始,然后逐步确定未知因素。
本问题中知道三个数字:50mm,20mm,36度。
而这个36度时与DC的距离相关的,所以图解时先画出滑块的两个极限位置,然后确定铰链A 所在的水平线,接着就是根据36度这个条件最终确定A的位置。
(1)确定滑块的极位及固定铰链A所在的直线先绘制水平线段C2C1,使得其距离为50mm.然后在其上方20mm的地方绘制一条水平直线I.那么铰链A就应该在这条直线上。
(2)根据极位夹角确定铰链A所在的圆下面要根据极位夹角来确定A所在的曲线,这样,该曲线与上述曲线相交就可以唯一确定A点的位置。
A点到C1,C2形成的夹角是36度。
那么所有与C1,C2形成夹角为36度的点有什么特征呢?---圆周角具有这种特征。
从几何知道,在一个圆上面,对应于同一个圆弧的圆周角都相等。
基于这一点,过C2做直线垂直于C2C1,而作射线C1E与C2C1夹角为90-36=54度,二者交于点E,则C2EC1这个角度就是36度。
现在以C1E为直径做一个圆,则在该圆上任意取一点,该点与C2C1连线的夹角就都是36度,从而A点必然在该圆上面。
根据上述规则做出的上图发现,该圆与水平线I并不相交。
这意味着作图有问题。
实际上,刚才作的C1E在C2C1之下,所以导致不相交。
因此改变策略,在C2C1之上作C1E,使得它与C2C1的夹角为54度。

曲柄压力机的曲柄滑块工作机构设计1摘要曲柄压力机广泛应用于冲裁,弯曲,校正,模具冲压等工作。
本次设计的为开式固定台式中型,公称压力为1600KN曲柄压力机。
本设计主要进行该曲柄压力机曲柄滑块工作机构的设计。
在设计中,首先根据该压力机要保证的主要技术参数——公称压力、滑块行程等,初步估算曲柄,连杆,滑块,导轨相关尺寸,然后分别对其进行校核,修正,最终确定各零部件尺寸;进行装模高度调节装置设计,并最终完成该曲柄滑块工作机构设计。
关键字:公称压力;曲轴;连杆;导轨;调节装置AbstractCrank press machine widely used in punching, bending, stamping die correction, etc.. The design for a fixed desktop and medium-sized, nominal pressure 1600KN crank press.The design of the division of labor is different, mainly completes the design of slider - crank mechanism of crank press. Designed mainly according to the overall design to determine the main parameters of the press, the nominal pressure, stroke parameters refer to the relevant manual crank connecting rod, a preliminary estimate, slide rail, correlation dimension, and then checking, correcting, ultimately determine the components size, and according to the requirements to complete the die height adjustment device design. Last write detailed slider crank mechanism design specifications, out major parts diagram.key word:nominal pressure,crankshaft,pitman,rack,regulating block.目录第一章曲柄压力机的工作原理及主要参数 (1)1.1压力机技术参数 (1)1.2 曲柄压力机的工作原理 (1)1.3曲柄压力机工作的特点 (2)1.4 曲柄形式 (2)1.4.1、曲轴驱动的曲柄滑块机构 (3)1.4.2、偏心轴驱动的曲柄滑块机构. 41.4.3、曲拐驱动的曲柄滑块机构 (4)1.5.4、偏心齿轮驱动的曲柄滑块机构41.4.5各种结构的区别及最终确定设计设计思路 (6)第二章曲柄滑块机构的构成及相关分析 (7)2.1压力机曲柄滑块机构的构成 (7)2.2曲柄压力机滑块机构的运动规律分析。

中国矿业大学成人高等教育本科毕业设计(论文)任务书学院(函授站)专业班级学生姓名任务下达日期:年月日任务完成日期:年月日毕业设计(论文)题目:曲柄滑块机构设计主要内容和要求:1、曲柄滑块的设计(1)曲柄滑块的组成(2)曲柄滑块的运动规律(3)曲柄滑块机构的的特性分析(4)计算滑块的运动范围(5)画出曲柄滑块的轮廓图(6)设计、绘制草图(7)各部件的连接设计2、机构的加工(1)机架的加工工艺分析(2)机架的加工程序3、零件图4、装配图5、参考资料院长(函授站站长)签字:指导教师签字:机械工程(函授)毕业设计指导书一、毕业设计的目的1、通过设计使学生综合运用有关课程的知识,巩固、深化、扩展有关机械设计方面的知识,树立正确的设计思想。
2、培养学生分析和解决工程实际问题的能力,使学生掌握简单机械的一般设计方法和步骤。
3、提高学生的有关设计能力,如计算能力、绘图能力等,使学生熟悉设计资料的使用,掌握经验估算等机械设计的基本技能。
4、掌握NC典型零件的加工方法二、设计内容:设计一对心曲柄滑块机构,曲柄滑块机构的结构图如下:图1 曲柄滑块机构三、原始数据A=400、B=120、C=240四、设计要求:1、采用无纸化绘制出曲柄滑块机构的总装图和零件图,零件图数量不得少于五张。
2、编写二到三个典型零件的加工工艺和CNC加工程序。
3、编写设计任务书一套。
五、设计内容和步骤本次设计分为三个阶段,计划在三个月内完成,各阶段的设计内容和步骤如下:第一阶段:1、设计准备工作(1)熟悉任务书,明确设计的内容和要求;(2)熟悉设计指导书,有关资料、图纸等。
2、总体设计(1)初步确定各部件结构、尺寸;(2)绘制各部件草图;第二阶段:3、零件图的绘制4、装配图的绘制第三阶段:5、编制数控加工程序6、总结写出设计总结,包括课题完成情况,以及个人收获体会。
8、答辩(1)作好答辩准备(概述自己设计的思路和过程,设计的特点);(2)参加答辩(包括个人陈述和答辩组老师提问)。

本篇再考察一道曲柄滑块机构的设计。
同样是给定行程速比系数来确定杆长。
设计一偏置曲柄滑块机构,已知滑块的行程速比系数为1.5,滑块的行程50 ,导路的偏距20 ,求曲柄和连杆长度,并求其最大压力角。
问题分析首先设计机构,然后再求最大压力角。
机构的设计。
先计算出行程速比系数如下那么根据题意,最后的结果应当如下图。
滑块的两个极位之间距离是50mm,而固定铰链A 在与CD平行20mm的直线上,而且A点到C,D的夹角是36度。
图解总是从已知条件开始,然后逐步确定未知因素。
本问题中知道三个数字:50mm,20mm,36度。
而这个36度时与DC的距离相关的,所以图解时先画出滑块的两个极限位置,然后确定铰链A所在的水平线,接着就是根据36度这个条件最终确定A的位置。
(1)确定滑块的极位及固定铰链A所在的直线先绘制水平线段C2C1,使得其距离为50mm.然后在其上方20mm的地方绘制一条水平直线I.那么铰链A就应该在这条直线上。
(2)根据极位夹角确定铰链A所在的圆下面要根据极位夹角来确定A所在的曲线,这样,该曲线与上述曲线相交就可以唯一确定A点的位置。
A点到C1,C2形成的夹角是36度。
那么所有与C1,C2形成夹角为36度的点有什么特征呢?---圆周角具有这种特征。
从几何知道,在一个圆上面,对应于同一个圆弧的圆周角都相等。
基于这一点,过C2做直线垂直于C2C1,而作射线C1E与C2C1夹角为90-36=54度,二者交于点E,则C2EC1这个角度就是36度。
现在以C1E为直径做一个圆,则在该圆上任意取一点,该点与C2C1连线的夹角就都是36度,从而A点必然在该圆上面。
根据上述规则做出的上图发现,该圆与水平线I并不相交。
这意味着作图有问题。
实际上,刚才作的C1E在C2C1之下,所以导致不相交。
因此改变策略,在C2C1之上作C1E,使得它与C2C1的夹角为54度。
然后以C1E为直径作出一个圆。
该圆与直线I有两个交点:A1和A2。
disp ' ****** 曲柄滑块机构的等影响法精度综合*******'N=input(' 输入机构运动精度影响尺度数目N = ');H=input(' 输入滑块行程的均值(mm) H = ');P=input(' 输入曲柄轴心至滑销最远距离(mm) P = ');DH=input(' 输入滑块位置允许误差(mm) DH = ');disp ' @@@@@@ 计算结果@@@@@@'R=H/2;fprintf(' 曲柄长度的均值R = %3.3f mm \n',R)L=P-R;fprintf(' 连杆长度的均值L = %3.3f mm \n',L) theta=0:10:360;hd=theta.*pi/180;% 计算曲柄长度和滑块长度的影响系数(偏导数的最大绝对值)CR=1-cos(hd);CL=0.5.*sin(hd).^2;CRm=max(abs(1-cos(hd)));CLm=max(abs(0.5.*sin(hd).^2));fprintf(' 曲柄长度影响系数的最大绝对值CRm = %3.6f \n',CRm) fprintf(' 连杆长度影响系数的最大绝对值CLm = %3.6f \n',CLm) % 计算曲柄长度和滑块长度的最大允许偏差DRm=DH/sqrt(N)/CRm;DLm=DH/sqrt(N)/CLm;fprintf(' 曲柄长度允许的最大偏差DRm = %3.6f mm \n',DRm) fprintf(' 连杆长度允许的最大偏差DLm = %3.6f mm \n',DLm) plot(theta,CR,'r')hold;gtext('曲柄长度影响系数曲线')title('\bf 机构尺度影响系数线图')xlabel('\bf 曲柄转角\theta(°)')ylabel('\bf 尺度影响系数')plot(theta,CL,'k')gtext('连杆长度影响系数曲线')grid on****** 曲柄滑块机构的等影响法精度综合*******输入机构运动精度影响尺度数目N = 2输入滑块行程的均值(mm) H = 100输入曲柄轴心至滑销最远距离(mm) P = 300输入滑块位置允许误差(mm) DH = 0.5@@@@@@ 计算结果@@@@@@曲柄长度的均值R = 50.000 mm连杆长度的均值L = 250.000 mm曲柄长度影响系数的最大绝对值CRm = 2.000000连杆长度影响系数的最大绝对值CLm = 0.500000曲柄长度允许的最大偏差DRm = 0.176777 mm 连杆长度允许的最大偏差DLm = 0.707107 mm。
关于偏置式曲柄滑块机构的优化设计及运动分析论文关于偏置式曲柄滑块机构的优化设计及运动分析论文1引言曲柄滑块机构是机械设计中常用的一种机构。
按行程速比系数K 设计平面曲柄滑块机构的问题一般归纳为:已知滑块行程H、行程速比系数K,通常有辅助条件,如给定偏距e(或给定曲柄长度r2,或给定连杆长度r3),来设计曲柄滑块机构(即确定未知长度尺寸),最后校验最小传动角γmin。
对该问题的求解,传统采用简单、直观的图解法,但设计精度较低。
利用Matlab解析法可迅速精确地设计曲柄滑块机构。
机构运动分析是根据给定的原动件运动规律,求出机构中其它构件的运动。
通过分析可以确定某些构件运动所需的空间,校验其运动是否干涉;速度分析可以确定机构从动件的速度是否合乎要求;加速度分析为惯性力计算提供加速度数据。
运动分析是综合分析和力分析的基础。
使用Matlab中的Simulink,可对动态系统进行建模、分析和仿真。
从而在形成实际系统前,能进行适时的修正,以减少总体设计时间,实现高效开发的目的。
2优化设计2.1设计实例及方程例如:要求设计滑块的'行程H=100mm,K=1.25,γmin≥40°的曲柄滑块机构。
式中:r1为滑块位移;r2为曲柄长度;r3为连杆长度;r4为偏距。
根据图1建立矢量方程:r2+r3=r1+r4速度方程的矩阵形式:1r3sinθ30-r3cosθ3·r1ω3=-ω2r2sinθ2ω2r2cosθ2加速度方程的矩阵形式:1r3sinθ30-r3cosθ3¨r2α3=-α2r2sinθ2-r2ω22cosθ2-r3ω23cosθ3α2r2cosθ2-r2ω22sinθ2-r3ω23sinθ3根据行程,极位夹角,行程速比系数,最小传动角的定义可推出以下方程:θ=K-1K+1×180°θ=arcsinr4r3-r2-arcsinr4r3+r2H=(r2+r3)2-r24-(r3-r2)2-r24γmin=arcosr2+r4r3式中:K为行程速比系数;H为行程;θ为极位夹角;γmin为最小传动角。