现代控制理论基础
- 格式:doc
- 大小:995.00 KB
- 文档页数:6
Elements of Modern Control Theory主讲:董霞现代控制理论基础西安交通大学机械工程学院Email:xdong@办公地点:西二楼东207参考教材《现代控制工程》王军平董霞主编西安交通大学出版社教材《现代控制理论基础》(机械类)何钺编机械工业出版社《现代控制工程》(第三版)Katsuhiko Ogata著卢伯英、于海勋译电子工业出版社第一章绪论现代控制理论是在20世纪50年代末、60年代初形成的控制理论。
之所以称其为现代控制理论是与经典控制理论相比较而言的。
1.1 控制理论发展简史目前国内外学术界普遍认为控制理论经历了三个发展阶段:经典控制理论现代控制理论智能控制理论这种阶段性发展是由简单到复杂、由量变到质变的辩证发展过程。
并且,这三个阶段不是相互排斥,而是相互补充、相辅相成的,它们各有其应用领域,并还在不同程度地继续发展着。
控制理论中反馈的概念代表性人物:瓦特(J.Watt),于1788年发明了蒸汽机飞球调速器。
这是一个典型的自动调节系统,由此拉开了经典控制理论发展的序幕。
控制理论诞生前,人们对于反馈就有了认识。
经典控制理论的诞生1868年,英国物理学家J.C.Maxwell 发表《论调速器》论文,解决了蒸汽机调速系统中出现的剧烈振荡问题;1877年,英国科学家E.J. Routh 建立了劳斯稳定性判据;1895年,德国数学家A. Hurwitz 提出了胡尔维茨稳定性判据;1892年,俄国数学家A. M.Lyapunov 发表了专著《论运动稳定性的一般问题》;1922年,美国的N. Minorsky 研究出用于船舶驾驶的伺服机构并提出PID 控制方法;1932年,美籍瑞典人H. Nyquist 提出了频域内研究系统稳定性的频率判据;经典控制理论的诞生1940年,H. W.Bode引入了对数坐标,使频域稳定性判据更适合工程应用;1942年,H. Harris引入了传递函数概念;1948年,W.R. Evans提出了根轨迹方法;1948年,N. Wiener发表了著名的《控制论》,标志着经典控制理论的诞生。
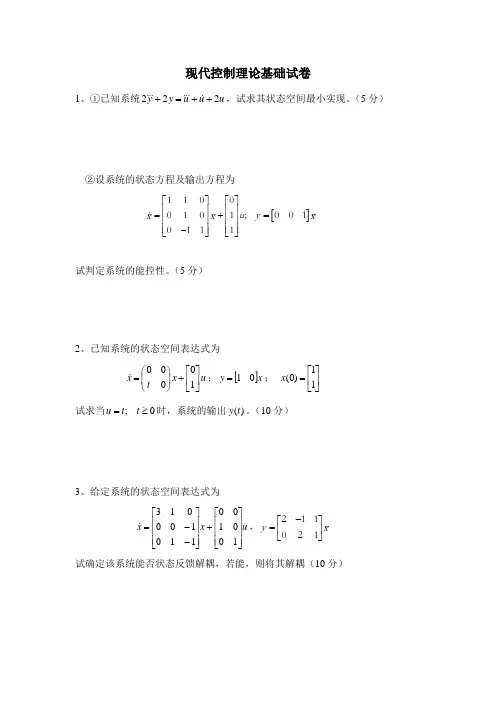
现代控制理论基础试卷1、①已知系统u u uy y 222++=+ ,试求其状态空间最小实现。
(5分)②设系统的状态方程及输出方程为11000101;0111x x u ⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦[]001y x =试判定系统的能控性。
(5分)2、已知系统的状态空间表达式为00001⎛⎫⎡⎤=+ ⎪⎢⎥⎝⎭⎣⎦x x u t ;[]x y 01=; ⎥⎦⎤⎢⎣⎡=11)0(x 试求当0;≥=t t u 时,系统的输出)(t y 。
(10分)3、给定系统的状态空间表达式为u x x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=100100110100013 ,211021y x -⎡⎤=⎢⎥⎣⎦ 试确定该系统能否状态反馈解耦,若能,则将其解耦(10分)4、给定系统的状态空间表达式为[]12020110,1001011--⎡⎤⎡⎤⎢⎥⎢⎥=-+=⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦x x u y x设计一个具有特征值为 1 1 1---,,的全维状态观测器(10分)5、①已知非线性系统 ⎩⎨⎧--=+-=2112211sin 2x a x x x x x试求系统的平衡点,并确定出可以保证系统大范围渐近稳定的1a 的范围。
(5分)②判定系统11221223x x x x x x =-+⎧⎨=--⎩在原点的稳定性。
(5)6、已知系统 u x x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=110011 ,试将其化为能控标准型。
(10分)7、已知子系统1∑ 111121011x x u -⎡⎤⎡⎤=+⎢⎥⎢⎥-⎣⎦⎣⎦,[]1110y x = 2∑ []22222110,01011x x u y x -⎡⎤⎡⎤=+=⎢⎥⎢⎥-⎣⎦⎣⎦ 求出串联后系统∑1∑ 2∑ 及其传递函数矩阵 (10分)。
答案1① 解 取拉氏变换知 )()2()()22(33s u s s s y s ++=+21121)1(21)(2213++-=+++=s s s s s g (3分) 其状态空间最小实现为u x x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡-=101110 ; 21021+⎥⎦⎤⎢⎣⎡=x y (2分)② 解1n c u BABA B -⎡⎤=⎣⎦ (2分)012111101⎡⎤⎢⎥=⎢⎥⎢⎥-⎣⎦,秩为2, 系统状态不完全能控。


现代控制理论基础试题一、选择题:1. 什么是现代控制理论的核心概念?A. 反馈原理B. 开环控制C. 传感器D. 控制算法2. 当系统的输出信号与期望的参考信号之间存在差异时,现代控制理论会采取以下哪种策略进行调节?A. 开环控制B. 闭环控制C. 反馈控制D. 前馈控制3. 现代控制系统通常包括哪些基本组成部分?A. 传感器、执行器、控制器B. 输入信号、输出信号、执行器C. 控制器、执行器、参考信号D. 反馈信号、执行器、控制器4. 现代控制理论的主要目标是什么?A. 降低系统效应B. 提高系统稳定性C. 增加系统响应速度D. 最小化系统误差5. 在现代控制系统中,传感器的作用是什么?A. 通过收集系统的反馈信息B. 将输入信号转化为输出信号C. 控制执行器的动作D. 校准控制器的参数二、填空题:6. 现代控制理论中,PID控制器中的比例、积分和微分项分别代表什么?比例项:_______积分项:_______微分项:_______7. 现代控制理论中,系统的稳定性通常通过计算系统的_________来判断。
8. 现代控制理论中,增益裕度是衡量系统稳定性的一个指标,它表示系统输出响应对增益变化的___________。
三、简答题:9. 请简述开环控制和闭环控制的区别。
10. 现代控制系统常用的传感器有哪些?请简要介绍一个传感器的工作原理。
四、分析题:11. 现代控制系统中的反馈环节起到了重要的作用,请你用一个简单的图示来说明反馈控制系统的基本结构。
12. 现代控制理论中,经典PID控制器在某些系统中可能存在不足之处。
请你简要分析当系统存在非线性或时变特性时,经典PID控制器可能出现的问题,并提出解决方案。
结束语:通过本试题,我们回顾了现代控制理论的核心概念、基本组成部分以及控制策略。
掌握现代控制理论对于工程实践具有重要的意义,它可以帮助我们设计和优化各种控制系统,提高系统的性能和稳定性。
希望通过这些试题的训练,您能够对现代控制理论有更深入的理解,并能够在实际应用中灵活运用。
I、描述部分更多免费资料,尽在第一章系统描述引言一个复杂系统可能有多个输入和多个输出,并且以某种方式相互关联或耦合。
为了分析这样的系统,必须简化其数学表达式,转而借助于计算机来进行各种大量而乏味的分析与计算。
从这个观点来看,状态空间法对于系统分析是最适宜的。
经典控制理论是建立在系统的输入-输出关系或传递函数的基础之上的,而现代控制理论以n个一阶微方程来描述系统,这些微分方程又组合成一个一阶向量-矩阵微分方程。
应用向量-矩阵表示方法,可极大地简化系统的数学表达式。
状态变量、输入或输出数目的增多并不增加方程的复杂性。
事实上,分析复杂的多输入-多输出系统,仅比分析用一阶纯量微分方程描述的系统在方法上稍复杂一些。
本文将主要涉及控制系统的基于状态空间的描述、分析与设计。
本章将首先给出状态空间方法的描述部分。
将以单输入单输出系统为例,给出包括适用于多输入多输出或多变量系统在内的状态空间表达式的一般形式、线性多变量系统状态空间表达式的标准形式(相变量、对角线、Jordan、能控与能观测)、传递函数矩阵,以及利用MATLAB进行各种模型之间的相互转换。
第二章将讨论状态反馈控制系统的分析方法。
第三章将给出几种主要的设计方法。
本章节为控制系统状态空间分析的引言。
节介绍传递函数的状态空间表达式,并给出状态空间表达式的各种标准形。
节讨论用MATLAB进行系统模型的转换(如从传递函数变换为状态空间模型等)。
参考教材本讲义的主要参考教材[1][美]Katsuhiko Ogata着,卢伯英,于海勋等译,《现代控制工程》(第三版),电子工业出版社,2000年。
[2]郑大钟编着,《线性系统理论》,清华大学出版社,1990年。
[3]常春馨主编,《现代控制理论基础》,机械工业出版社,1988年。
其他参考教材[4][日]绪方胜彦着,卢伯英等译,《现代控制工程》,科学出版社,1972年。
[5]王照林等编,《现代控制理论基础》,国防工业出版社,1981年。
现代控制理论基础
1.一个线性系统的状态空间描述( B )
A.是唯一的; B.不是唯一的
C.是系统的内部描述;D.是系统的外部描述
2.设系统的状态空间方程为=X+u,则其特征根为( D )
A. s1= -2,s2= -3;B. s1= 2,s2= 3;C. s1= 1,s2= -3;D.s1=-1,s2=-2 3.状态转移矩阵(t)的重要性质有( D)。
A.φ(0)=0; B.φ-1(t)= -φ(t);
C.φk(t)=kφ(t);D .φ(t1+t2)=φ(t1)·φ(t2)4.系统矩阵A=,则状态转移矩阵φ(t)= ( C)
A. ; B. ; C. ; D. ;
5. 设系统=X+u,y=x,则该系统( A )。
A.状态能控且能观测; B.状态能控但不能观测;
C.状态不能控且不能观测 D.状态不能控且能观测;
6.若系统=X+u,y=x是能观测的,则常数a取值范围是( C)。
A.a ≠ 1;B.a = 1;C.a ≠ 0;D.a = 0;
7. 线性系统和互为对偶系统,则(AD)
A.C1=B2T;B. C1=B2;C. C1=C2;D.C1=B2T
8. 李雅普诺夫函数V(x)=(x1+x2)2,则V(x)是(C)
A.负定的;B.正定的;C.半正定的;D.不定的
9.单位脉冲响应的拉氏变换为(B)
A.; B.; C. 0; D. 1
10.通过状态反馈能镇定的充分必要条件是,渐近稳定的子系统是(B)
A.能控; B.不能控; C.能观测; D.不能观测
二.填空题(每空1分,10分)
11.状态方程揭示了系统的内部特征,也称为内部描述。
12.已知系统矩阵,则特征多项式为S2-S+1 。
13.对于完全能控的受控对象,不能采用输出反馈至参考信号入口处的结构去实现闭环极点的任意配置。
14.在状态空间分析中,常用状态结构图来反映系统各状态变量之间的信息传递关系。
15.为了便于求解和研究控制系统的状态响应,特定输入信号一般采用脉冲函数、阶跃函数和斜坡函数等输入信号。
16.若已知线性系统的矩阵【A AB A2B】的秩为3,那么该系统是能控的。
17.当且仅当系统矩阵A的所有特征值都具有负实部时,系统在平衡状态时渐近稳定的。
18.同一个系统,状态变量的选择不是唯一的。
19.控制系统的稳定性,包括外部稳定性和内部稳定性。
20.能观测性是反映输出对系统状态的判断能力。
三.名词解释(共20分)
21.状态空间描述(3分)
答:用状态变量构成输入,输出与状态之间的关系方程组即为状态空间描述。
22. 零输入响应(3分)
答:是指系统输入为零时,由初始状态引起的自由运动。
23.稳定(3分)
答:系统稳定性包括外部稳定和内部稳定;外部稳定是指系统在零初始条件下通过其外部状
态,即由系统的输入和输出两者关系所定义的外部稳定性;内部稳定是指系统在零输入条件下通过其内部状态变化所定义的内部稳定性。
李雅普诺夫定义下的稳定:设系统的初始状态位于以平衡状态为球心,半径为δ的闭球域S(δ)内,用数学表达式可表示为≤δt=,若系统方程的解在
t→∞的过程中都位于以平衡状态为球心,任意规定半径ε的闭球域S(ε)内,用数学表达式为:
≤εt≥
则称该系统在平衡状态是稳定的。
24.对偶原理(3分)
答:设和是互为对偶的两个系统,则的能控性等价于的能观测性,的能观测性等价于的能控性。
25.状态观测器(3分)
答:状态重构的新系统是利用原系统中能直接量测到的信号作为输入,而它的输出状态在一定条件下能与原系统的状态保持相等,称这个用以实现重构状态的新系统为状态观测器。
四.简答题(共15分)
26.已知3阶系统的状态空间描述,试画出系统状态结构图。
+u
y=
解:
27.简述状态空间描述与传递函数的区别
答:经典控制理论中,对一个线性定常系统,是用传递函数来描述的,它反映系统输出响应与输入的关系,称为外部描述。
它一般只能处理但输入单输出系统,并且对存在于系统内部的中间变量是不能描述的。
状态空间描述是由状态变量构成的一阶微分方程组来描述,揭示了系统的内部特征,它可以处理多输入多输出系统,而且还可以方便的处理初始条件。
28.简述传递函数矩阵的实现问题。
所谓实现问题,就是根据给定的传递函数阵W(S),求其相应的状态空间描述的问题。
就是对于给定的传递函数阵W(S),寻求一个状态空间描述,是分式C(SI-A)-1B+D= W(S)
成立,称该状态空间描述为传递函数阵地一个实现。
29.简述李雅普诺夫第二法的含义
李雅普诺夫第二法是从系统能量的观点出发,对系统进行稳定性分析的。
它的基本思想是如果一个系统,它的总能量连续地减小,直到平衡状态时会衰减到最小值,那么这个系统就是渐近稳定的。
30.简述状态方程= Ax + Bu,x(0)=0,t≥0的解的表达式x(t)=的
物理含义。
答:物理含义:系统的运动有两部分组成,其中第一项是初始状态的转移项,第二项为控制输入作用下的受控项。
正是由于受控项的存在,提供了通过选取合适的输入u,是状态x(t)的轨迹满足期望要求的可能性,这是我们分析系统的结构特性和对系统进行综合的基本依据。
五.计算题(共15分)
31.设系统的状态空间描述为=X,试分析系统在平衡状态的稳定性。
解:(1)求平衡状态,令=0,得=0;即x e1=x e2=0
(2)选取李雅普诺夫函数V(x),并求其对t的导数,
V(x) = x12+ x22>0
其导数 = 2x1+2x2= 2x1(-x1-x2)+2x2(x1-2x2)=-2x12-4x22<0
<0
可见其导数是负定的,根据李雅普诺夫第一判据可知,系统在平衡状态下x e=T处是渐近稳定的。
32.已知状态转移矩阵Ф(t)=,试求系统矩阵A和Ф-1(t)。
解:=
Ф-1(t) = Ф(-t) =
系统矩阵A=,其中t=0,
则A=
33.已知系统的状态空间描述=X+u,y=x,
(1) 求系统的传递函数W(S)
(2) 试设计状态反馈控制器,使闭环系统的极点为-1,-1。
解:(1) W(s)=c(sI-A)-1b=
=
=
(2) 传递函数无零极点对消,受控系统完全能观测;
由于是单输入-单输出系统,设反馈矩阵G=;
则观测器的特征方程有
f(λ)= det [λI-(A-Gc)]==λ2+(2g1-1) λ+(2g2-2g1) 根据给定的期望极点,求出期望的观测器特征方程为:
f()=( λ+1)2=λ2+2λ+1
比较两式中λ的同次项系数,系数相等得:
2g1-1=2;2g2-2g1=1;
解得:g1=1.5;g2=2
即:G=。