第3章 三维运动估计
- 格式:ppt
- 大小:1.28 MB
- 文档页数:30
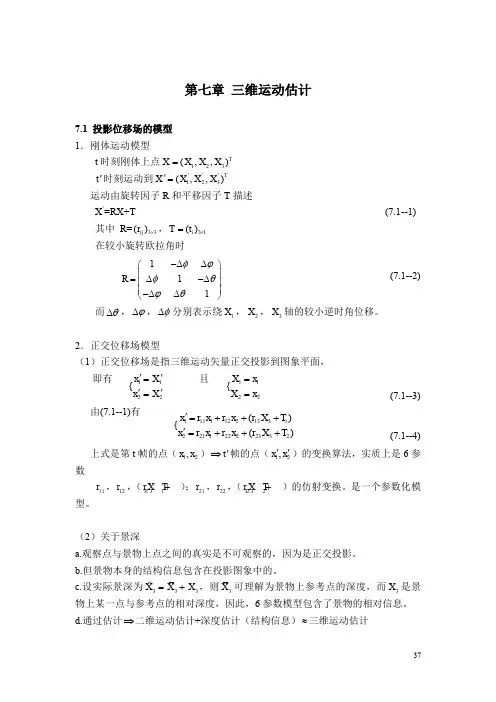
第七章 三维运动估计7.1 投影位移场的模型 1.刚体运动模型t 时刻刚体上点123(,,)T X X X X =t '时刻运动到'''123(,,)T X X X X '= 运动由旋转因子R 和平移因子T 描述X ’=RX+T (7.1--1) 其中 R=33()ij r ⨯,31()i T t ⨯= 在较小旋转欧拉角时(7.1--2) 而θ∆,ϕ∆,φ∆分别表示绕1X ,2X ,3X 轴的较小逆时角位移。
2.正交位移场模型(1)正交位移场是指三维运动矢量正交投影到图象平面,即有 且 (7.1--3) 由(7.1--1)有(7.1--4) 上式是第t 帧的点(12,x x )⇒t '帧的点(12,x x '')的变换算法,实质上是6参数11r ,12r ,(1331rX T +);21r ,22r ,(2332rX T +)的仿射变换。
是一个参数化模型。
(2)关于景深a.观察点与景物上点之间的真实是不可观察的,因为是正交投影。
b.但景物本身的结构信息包含在投影图象中的。
c.设实际景深为333X X X =+,则3X 可理解为景物上参考点的深度,而3X 是景物上某一点与参考点的相对深度,因此,6参数模型包含了景物的相对信息。
d.通过估计⇒二维运动估计+深度估计(结构信息)≈三维运动估计111R φϕφθϕθ-∆∆⎛⎫ ⎪=∆-∆ ⎪ ⎪-∆∆⎝⎭1122{x X x X ''=''=1122{X x X x ==1111122133122112222332(){()x r x r x r X T x r x r x r X T '=+++'=+++3.透视位移场模型(1)透视位移场可由透视模型(7.1--5)代入(7.1--1)式得到(令f=1)(7.1--6)(2)这是非线性模型(3)对三维空间中任意形状运动表面有效,因为深度参数3X 是独立的。
三维物体识别与姿态估计算法研究第一章引言1.1 研究背景三维物体识别与姿态估计是计算机视觉领域的重要研究方向。
随着计算机硬件性能的提升和深度学习的兴起,三维物体识别与姿态估计在各个领域中得到了广泛应用。
通过精确地估计三维物体的姿态,可以实现多个领域的应用,如虚拟现实、机器人操作、自动驾驶等。
1.2 研究意义三维物体识别与姿态估计的研究对于提升计算机视觉系统的性能和应用的效果具有重要意义。
准确地识别和估计物体的姿态可以帮助计算机视觉系统更好地理解环境和实现自主决策。
同时,三维物体识别与姿态估计的应用潜力巨大,可以应用于智能家居、智能制造、医疗健康等领域。
1.3 研究目标本文旨在对三维物体识别与姿态估计的算法进行研究,提出有效的方法和技术,提高物体识别和姿态估计的准确性和实时性。
通过实验和分析,评估不同算法在不同场景下的性能表现,为实际应用提供有效解决方案。
第二章相关技术综述2.1 三维物体识别方法2.1.1 基于深度学习的方法深度学习在三维物体识别中取得了巨大成功,特别是基于卷积神经网络(CNN)的方法。
这些方法通过学习大量的标注数据,自动地学习物体的特征表示,实现了出色的识别性能。
2.1.2 基于特征描述子的方法传统的基于特征描述子的方法在三维物体识别中仍然有重要的作用。
这些方法通过提取物体的局部特征,并构建描述子进行匹配和识别。
例如,SIFT、SURF等特征描述子在三维物体识别领域具有广泛的应用。
2.2 姿态估计方法2.2.1 基于模型的方法基于模型的方法通过建立物体的几何模型和姿态变换模型,实现对物体姿态的估计。
这些方法通常需要预先建立物体的模型,然后通过匹配和优化过程估计姿态。
2.2.2 基于深度学习的方法深度学习在姿态估计中也取得了显著的进展。
通过将姿态估计问题转化为回归或分类任务,基于深度学习的方法可以学习到更准确的姿态表示和预测方法。
第三章研究方法与实现3.1 数据集为了验证算法的性能,我们使用了多个公开的三维物体识别与姿态估计数据集,如ObjectNet3D、LINEMOD和YCB等。
运动估计一、概述运动估计的基本思想是将图像序列的每一帧分成许多互不重叠的宏块,并认为宏块内所有象素的位移量都相同,然后对每个宏块到参考帧某一给定特定搜索范围内根据一定的匹配准则找出与当前块最相似的块,即匹配块,匹配块与当前块的相对位移即为运动矢量。
视频压缩的时候,只需保存运动矢量和残差数据就可以完全恢复出当前块。
这段来源于百度:第一句,说把一帧分成许多不重叠的宏块,涉及到几个概念,一个是分隔,一个是不重叠,一个是宏块,H.264的宏块,都是16*16的像素块,其中又有一个隐含的概念,就是一个宏块包含亮度,色度U和色度V,其中.二比一的关系。
第二句,认为宏块内所有像素的位移量都相同。
当然,实际情况可能是一个宏块内的像素属于两个运动物体,比如属于两只小鸟,分别飞往两个方向,这样的话,这分属于两个小鸟的像素的位移,包括移动距离和方向,都是不一样的,但这样太复杂了,而且,H.264里,用到这个位移,它并不是要真的研究位移,只是为了压缩样本像素的网络传输,所以,在高度复杂的问题面前,没必要纠结对与错。
而是把宏块作为一个整体来看的。
它只是要在参考帧中找到一个类似的块来求差,而参考帧的这个块,也许和当前的块根本就没任何关系。
我是这样猜出想的,比如这个帧里,有一块纯黑的区域,在同一个帧里,还有另一块纯黑的区域,如下图:假定这个图从左向右移动,它就成了一段连续的,相似的动画,或者叫一个序列算了。
这样的话,在上面的那个黑色区域里的某一个宏块,可以用前一帧对应位置附近的一个黑色宏块作参考,也可以用前一帧里,下面这个黑色区域里的一个宏块作参考,在小范围里来说,压缩效果是一样的。
看H.264里,有个最优匹配的概念,对于这个纯色的图来说,没什么太大的感觉,如果对于那些花花绿绿的真彩色图来说,很少存在这样的纯色块,那个最优匹配应该就有优势了。
在真彩色的每一个宏块,它并不见的能找到一个和它一样样的宏块来作参考,一般也就找个比较接近的,那这个最优匹配,就是找最近似的了吧,如何认为是最近似的,好像是H.264里的SAE什么的,不管是不是它,肯定有一个判断的标准。

《计算机视觉》课程教学大纲课程编号:50420031课程名称:计算机视觉英文名称:Computer Vision课程类别:专业限选课学分:2学时:40开课学期:二开课周次:11-20开课教研室:自动化系计算机控制教研室任课教师及职称:刘禾教授先修课程:图像处理与分析适用专业:模式识别与智能系统、控制理论与控制工程课程目的和基本要求:课程设置的目的使硕士研究生掌握介绍计算机视觉的基本理论和基本方法。
通过课程学习要求学生觉掌握的计算机视觉基本理论与方法以及计算机视觉的一些典型应用,了解国内外最新研究成果。
通过本课程学习使学生掌握计算机视觉的基本概念、基本理论和方法,初步具有运用相应理论解决实际问题的能力。
课程主要内容:全部课程内容分九章,各章具体内容、学时分配如下:第一章概述(2 学时)内容:计算机视觉的基本概念,Marr视觉计算理论,成像几何基础,计算机视觉的应用。
第二章人类视觉(2 学时)内容:人类视觉简介,视觉信息的多层处理。
第三章边缘检测(4 学时)内容:经典微分算子的边缘检测、LOG滤波器与马尔-希尔德累思边缘检测算子、多灰度图像的边缘聚焦法、坎尼边缘检测算子和基于梯度信息的自适应平滑滤波。
第四章明暗分析(2 学时)内容:图像辐射图,表面方向,反射图,由图像明暗恢复形状。
第五章深度分析(4 学时)内容:三维感知基本理论和方法,立体成像原理,被动立体测定技术和主动立体测定技术。
第六章标定问题(6 学时)内容:图像表征与摄像机标定,其中包括透视投影变换、摄像机的标定、摄像机的运动控制模型,双目立体标定。
第七章三维场景表示(4 学时)内容:三维空间曲面的表示,曲面分割等。
第八章二维运动图像分析(4 学时)内容:图像运动特征提取的基本方法,由局部光流恢复结构与运动参数估计,基于块的运动分析。
第九章三维运动估计(4 学时)内容:三维运动与结构估计、由运动与立体观测恢复3—D结构和基于生物视觉运动感知原理的多速度运动检测;基于CAD模型的三维机器视觉。

运动物体三维建模与姿态估计算法研究随着科技的不断发展,计算机视觉技术在运动物体三维建模和姿态估计方面的应用越来越广泛。
在计算机视觉领域中,运动物体三维建模和姿态估计是两个核心问题,主要通过运用计算机视觉技术来实现的。
运动物体三维建模和姿态估计技术可以直观地获得物体的三维信息,从而为后续的应用做好准备。
一、运动物体三维建模运动物体三维建模是指通过一系列的图像和视频数据来重建物体的三维形状和纹理信息,为计算机视觉的研究提供重要基础。
这里我们介绍基于静态物体三维重建技术的运动物体三维建模方法。
基于静态物体三维重建技术的运动物体三维建模方法主要通过多视角的图像和视频数据来恢复物体表面的三维形状和纹理信息,具体流程包括以下步骤:1.采集多视角图像或视频序列采集多视角图像或视频序列是三维重建的第一步,通过多视角的图像或视频序列可以确定运动物体每个时刻的位置,获得运动物体的多个角度的信息。
2.相机标定相机标定是三维重建的必要步骤,主要用于校正多视角图像或视频序列中的畸变,确定相机内外参数。
在标定中需要使用棋盘格等规则的物体作为标定物来提取图像中相应的特征点,进而计算相机的内外参数。
3.特征点匹配特征点匹配是三维重建的关键步骤,通过在不同视角下对图像或视频序列进行特征点提取和匹配,建立起不同视角下的对应关系,获得物体运动轨迹。
在特征点匹配中可以采用基于局部特征描述的算法,例如SIFT、SURF、ORB等算法。
4.三维重建三维重建是运动物体三维建模的核心步骤,根据不同视角下的特征点匹配结果,将二维图像坐标投影到三维空间中,利用三角化算法计算出每个三维点的坐标。
最后,通过网格化方法得到三维运动物体的模型。
二、姿态估计姿态估计是指根据给定的图像或视频序列,对运动物体的姿态角进行估计,以获得物体的姿态信息。
姿态估计在计算机视觉中有着广泛的应用,例如人体识别、物品抓取和机器人导航等。
目前,常用的姿态估计算法主要包括基于模型的方法和基于特征点的方法。

理论力学中的三维运动分析理论力学是物理学的基础学科,用数学语言描述和分析物体运动的规律。
在理论力学中,三维运动的分析是一项重要的任务,它涉及到了物体在三个独立方向上的运动特性。
下面将介绍理论力学中三维运动的基本概念和分析方法。
一、三维运动的基本概念三维运动是指物体在空间中的运动,涉及到三个互相垂直的坐标轴。
通常我们使用直角坐标系来描述三维空间,其中x轴、y轴和z轴分别表示三个独立的方向。
物体在这三个方向上的位移、速度和加速度都是独立的,需要分别进行分析。
二、三维运动的位移分析对于三维运动,我们可以通过矢量的概念来描述物体的位移。
位移矢量以起点和终点为基准点,表示物体从起点到终点的位移。
在三维空间中,我们可以使用三维位移矢量来表示物体在x轴、y轴和z轴上的位移分量。
通过矢量的加法和减法,我们可以求得物体在三个方向上的总位移。
三、三维运动的速度分析在理论力学中,速度被定义为单位时间内物体位移的改变率。
对于三维运动,我们可以通过计算物体在x轴、y轴和z轴上的速度分量来得到物体的三维速度。
根据速度的定义,我们可以得到速度矢量的大小和方向,表示物体在空间中运动的快慢和方向。
四、三维运动的加速度分析加速度是速度的变化率,表示单位时间内速度的改变量。
对于三维运动,我们可以分别计算物体在x轴、y轴和z轴上的加速度分量。
通过矢量运算,我们可以求得物体的三维加速度矢量。
加速度的大小和方向可以帮助我们判断物体在空间中的运动情况。
五、三维运动的运动方程根据牛顿第二定律,在理论力学中可以得到三维运动的运动方程。
运动方程在三个方向上分别对位移、速度和加速度进行了描述。
通过求解运动方程,我们可以得到物体的位移、速度和加速度在时间上的变化规律,从而对物体的运动进行准确的分析和预测。
六、三维运动的实例分析为了更好地理解三维运动的分析方法,下面以抛体运动为例进行分析。
抛体运动是一个常见的三维运动,物体在水平方向和竖直方向上同时进行运动。
关于主动3—D运动估计算法的研究
杨敬安
【期刊名称】《合肥工业大学学报:自然科学版》
【年(卷),期】1998(021)001
【摘要】文章提出主动观察者通过控制摄象机旋转实现凝视与跟踪的主动3-D运动估计算法,算法示出主动观察者能够控制其gaze使环境特征在其图象上保持固定,把不适定问题转变为适定问题,从而缩减了待解问题的维数及运动参数,大大简化计算的复杂性。
有效地进行3-D运动估计,自运动复原以及碰撞时间的计算。
【总页数】8页(P1-8)
【作者】杨敬安
【作者单位】合肥工业大学
【正文语种】中文
【中图分类】TP391.41
【相关文献】
1.主动段弹道跟踪与关机点估计算法研究 [J], 钮俊清;任清安
2.基于运动矢量时-空特性的快速运动估计算法研究 [J], 刘龙;宋琦军;赵太飞;元向辉
3.基于IMM-SRCDKF的高速机动目标运动状态估计算法研究 [J], 付磊; 张龙; 张丁
4.基于IMM-SRCDKF的高速机动目标运动状态估计算法研究 [J], 付磊; 张龙; 张
丁
5.纵横向运动耦合时车辆状态估计算法研究 [J], 周兴林;袁琛琦;盛中华
因版权原因,仅展示原文概要,查看原文内容请购买。
第七章 三维运动估计7.1 投影位移场的模型 1.刚体运动模型t 时刻刚体上点123(,,)T X X X X =t '时刻运动到'''123(,,)T X X X X '= 运动由旋转因子R 和平移因子T 描述X ’=RX+T (7.1--1) 其中 R=33()ij r ⨯,31()i T t ⨯= 在较小旋转欧拉角时(7.1--2) 而θ∆,ϕ∆,φ∆分别表示绕1X ,2X ,3X 轴的较小逆时角位移。
2.正交位移场模型(1)正交位移场是指三维运动矢量正交投影到图象平面,即有 且 (7.1--3) 由(7.1--1)有(7.1--4) 上式是第t 帧的点(12,x x )⇒t '帧的点(12,x x '')的变换算法,实质上是6参数11r ,12r ,(1331rX T +);21r ,22r ,(2332rX T +)的仿射变换。
是一个参数化模型。
(2)关于景深a.观察点与景物上点之间的真实是不可观察的,因为是正交投影。
b.但景物本身的结构信息包含在投影图象中的。
c.设实际景深为333X X X =+,则3X 可理解为景物上参考点的深度,而3X 是景物上某一点与参考点的相对深度,因此,6参数模型包含了景物的相对信息。
d.通过估计⇒二维运动估计+深度估计(结构信息)≈三维运动估计111R φϕφθϕθ-∆∆⎛⎫ ⎪=∆-∆ ⎪ ⎪-∆∆⎝⎭1122{x X x X ''=''=1122{X x X x ==1111122133122112222332(){()x r x r x r X T x r x r x r X T '=+++'=+++3.透视位移场模型(1)透视位移场可由透视模型(7.1--5)代入(7.1--1)式得到(令f=1)(7.1--6)(2)这是非线性模型(3)对三维空间中任意形状运动表面有效,因为深度参数3X 是独立的。