舰载机起降限制区域及主要影响参数
- 格式:pdf
- 大小:1.25 MB
- 文档页数:7
最近,委员在网友“007兄弟”的博客上看到了辽宁号航母的一张俯视图。
图中除了可以看到航母甲板上的几条主要画线外,还有一些比较暗淡的画线,委员判断它们是舰载机停放点的标注线,用来帮助甲板调度人员准确放置舰载机。
委员认为,基于航母舰载机调度的通常规律,我们这些业余爱好者也可以通过这些标注线观察出辽宁号航母的舰载机调度操作模式。
以下就是委员自己的一些分析。
欢迎讨论,谢绝查水表。
首先说说那些“舰载机调度的通常规律”。
委员认为结合辽宁号的舰体布局,主要有以下几点:1.舰载机起飞前需要加油、挂弹、测试发动机工况。
这些操作非常危险,不能在甲板下机库内完成,只能在甲板上进行。
所以甲板调度人员必须为舰载机的起飞前准备工作预留时间和甲板空间。
尤其是发动机测试,高温气流会从发动机喷口射出很远距离,极易伤害甲板上的人员和设备。
所以,测试发动机时舰载机必须停放在甲板边缘处的停放点,且尾部朝向甲板外。
2.舰载机降落后也需要在甲板上短暂停放,进行简单的检查,然后通过升降机送下机库。
3.舰载机的起飞和降落操作需要分享有限的甲板空间。
为保证安全操作,提高调度效率,起飞和降落操作应尽量选择互不干扰的停放点和跑道。
4.舰载机的起飞和降落操作都非常危险,事故概率很高。
万一飞机坠毁在航母附近海面,需要尽快营救落水飞行员。
所以舰载机起降操作期间航母甲板上或者周边空域应保留有至少一架搜救直升机。
5.为了保护航母安全,航母甲板上应当为少数值班战机留出位置,保证它们可以在短时间内起飞截击来袭敌机。
6.辽宁号有三个固定翼舰载机起飞点。
两个短起飞点位于前甲板,对应起飞线长度约为105米。
从这里起飞的歼15战机滑跑距离不足,只能携带少量弹药和燃油,战斗力和续航力均较低,不适合执行攻击性任务。
三号长起飞点位于后甲板,对应起飞线长约195米,可以保证战机满载弹药和油料起飞,战斗力和续航力均明显高于短点起飞的战机。
7.辽宁号的两个升降机均位于右舷。
因此,左舷停机区应尽量留给待命值班的备用飞机。
2020年12月第38卷第6期西北工业大学学报JournalofNorthwesternPolytechnicalUniversityDec.Vol.382020No.6https://doi.org/10.1051/jnwpu/20203861249收稿日期:2020⁃02⁃27作者简介:马凯超(1988 ),航空工业第一飞机设计研究院工程师,主要从事飞机载荷设计与试飞技术研究㊂舰载螺旋桨运输机发动机短舱飞行载荷设计马凯超,唐长红,张建叶,牛孝飞,范庆志(航空工业第一飞机设计研究院,陕西西安㊀710089)摘㊀要:舰载螺旋桨运输机布局紧凑,发动机短舱尺寸和质量较大,受螺旋桨滑流影响显著,飞行载荷问题突出,国内设计经验仍显不足㊂研究了某飞机发动机短舱的气动载荷㊁惯性载荷㊁陀螺力矩等设计方法及相关的设计规范约束与全机机动仿真技术㊂首先通过对规范的理解和选择确定短舱飞行载荷设计范围;建立机动仿真模型,获得短舱典型载荷工况;通过CFD方法获得有㊁无滑流影响的短舱压力分布数据;计算㊁筛选短舱的设计载荷与设计载荷工况;对比有/无滑流影响的气动载荷计算结果㊂研究表明:短舱的设计载荷工况出现在最大法向载荷系数(nZ)下的急剧俯仰机动㊁设计俯冲速度(VD)下的偏航机动㊁最大着舰质量下的发动机最大拉力等情况中;短舱侧向以气动载荷为主;法向以惯性载荷为主,极值情况下惯性力超过气动力4倍;某些机动/状态下,螺旋桨滑流可使短舱总气动力增大90%以上,靠近螺旋桨区域增幅更大㊂关㊀键㊀词:舰载螺旋桨运输机;发动机短舱;气动载荷;惯性载荷;设计规范;机动仿真;螺旋桨滑流;设计载荷工况中图分类号:V215.3㊀㊀㊀文献标志码:A㊀㊀㊀文章编号:1000⁃2758(2020)06⁃1249⁃08㊀㊀舰载螺旋桨运输机是舰载运输机的主要形式,受性能指标㊁舰机适配性等约束,具有翼载荷大㊁布局紧凑㊁动力需求大㊁气动外形复杂等特点[1⁃2]㊂发动机短舱作为一个位于机身外侧㊁螺旋桨正后方的翼吊集中质量大尺寸部件,包含着发动机㊁起落架㊁发动机固定装置㊁液压㊁环控等系统设备,在飞机做机动㊁遭遇突风㊁加速着舰(舰载机特有)等过程[3]中受螺旋桨拉力㊁气动力㊁惯性力㊁陀螺力矩等因素的综合影响,飞行载荷问题突出㊂同时,发动机短舱是受螺旋桨滑流影响最大的部件之一,滑流显著改变了短舱表面流场和压力分布,进而显著改变了其气动载荷[4]㊂综上,舰载螺旋桨运输机发动机短舱(以下简称 短舱 )的飞行载荷设计中,需重点考虑各种情况下的气动载荷㊁惯性载荷㊁陀螺力矩以及螺旋桨滑流的影响等[5]㊂目前国内在该问题上的设计思想和经验均有待加强㊂首先,应明确飞行载荷设计的目标是确定气动载荷㊁惯性载荷㊁陀螺力矩等力和力矩的单值/组合边界值,即提出设计载荷(designloads),同时明确对应的工况,即设计载荷工况(designloadcases)[6]㊂其次,短舱的飞行载荷设计不是孤立的,需与全机其他部件同时进行㊂全机飞行载荷设计的输入包括重量㊁惯量㊁高度㊁速度㊁载荷系数包线等,以及通过风洞实验和/或CFD方法建立的全机/部件气动特性数据㊁压力分布数据,并考虑结构弹性的影响[5,7⁃9]㊂对这些输入数据建立满足载荷设计规范要求和具体算例需求的全机机动仿真模型㊁部件载荷模型等,以得到全机/部件的典型载荷工况(typicalloadcases)㊁计算部件的总载荷与分布载荷,进而从中筛选出短舱的设计载荷工况与设计载荷㊂针对某飞机短舱飞行载荷设计的理论和工程实践需要,研究了以下内容:①理解㊁筛选航空规章和设计指南中适用于本问题的条款,确定载荷设计范围;②研究全机机动仿真和短舱气动载荷建模关键技术;③根据设计范围简化惯性载荷㊁陀螺力矩和反扭矩模型;④结合CFD方法,确立全套短舱飞行载荷设计输入;⑤求解㊁筛选设计载荷与设计载荷工况,分析主要载荷项占比及螺旋桨滑流对气动载荷西㊀北㊀工㊀业㊀大㊀学㊀学㊀报第38卷影响㊂1㊀设计规范与设计范围1.1㊀设计规范根据‘中国民用航空规章第25部C分部 结构“(以下简称 规范 )[10]中的要求,短舱的严重载荷情况应重点关注对称机动引起的法向载荷㊁滚转机动引起的法向和侧向载荷㊁偏航机动引起的侧向载荷及其他相关的规范条款,如表1所示㊂对某飞机,应在充分理解规范条款的前提下,将其具体为载荷设计模型和约束条件㊂表1㊀与短舱飞行载荷设计相关的规范条款条款编号条款名称25.331对称机动情况25.333飞行机动包线25.335设计空速25.337限制机动载荷系数25.341突风和紊流载荷25.349滚转情况25.351偏航机动情况25.361发动机扭矩25.363发动机和辅助动力装置支架的侧向载荷25.367发动机失效引起的非对称载荷25.371陀螺载荷1.2㊀设计范围文献[5]要求,螺旋桨飞机的发动机短舱应能承受飞机在机动㊁突风㊁尾旋等情况下由于螺旋桨拉力㊁扭矩㊁陀螺力矩引起的载荷㊁气动载荷和惯性载荷;此外,需考虑侧向载荷与发动机停车载荷情况㊂同时也指出,在考虑发动机短舱载荷时,突风情况仅针对机翼面积大于100m2的飞机,尾旋情况仅适用于允许进入尾旋的飞机㊂文献[11]指出,不同飞机的不同部件应设定各自的载荷设计范围,确保既不遗漏可能的严重载荷情况,又不使得计算量过大㊂根据以上要求,结合某飞机的特点,制定短舱飞行载荷设计范围,见表2㊂其中,由于某飞机机翼面积不大于100m2,且不允许进入尾旋,故只需考虑各种机动和发动机停车状态下的载荷情况㊂表2㊀短舱飞行载荷设计范围序号载荷情况主要载荷项载荷类型1大迎角俯冲拉起惯性载荷㊁陀螺力矩对称机动载荷2小迎角俯冲拉起惯性载荷㊁法向气动载荷㊁陀螺力矩对称机动载荷3最大负迎角飞行惯性载荷㊁陀螺力矩对称机动载荷4最小负迎角飞行惯性载荷㊁法向气动载荷㊁陀螺力矩对称机动载荷5俯仰平面内飞机直线加速度与角加速度综合作用惯性载荷㊁气动载荷㊁陀螺力矩对称机动载荷6最大拉力螺旋桨最大拉力㊁反扭矩配平状态载荷7起飞功率发动机反扭矩与机动包线A点限制载荷的75%同时作用气动载荷㊁惯性载荷㊁陀螺力矩㊁反扭矩对称机动载荷8最大连续功率发动机反扭矩与机动包线A点限制载荷同时作用气动载荷㊁惯性载荷㊁陀螺力矩㊁反扭矩对称机动载荷9起飞功率发动机反扭矩的1.6倍与1g平飞载荷同时作用气动载荷㊁惯性载荷㊁陀螺力矩㊁反扭矩配平状态载荷10侧向惯性载荷情况惯性载荷非对称机动载荷11侧向惯性载荷与最大拉力组合惯性载荷㊁气动载荷㊁螺旋桨最大拉力㊁反扭矩非对称机动载荷12稳定侧滑侧向气动载荷非对称机动载荷13偏航平面内飞机直线加速度与角加速度综合作用惯性载荷㊁气动载荷㊁陀螺力矩非对称机动载荷14倾斜平面内飞机直线加速度与角加速度综合作用惯性载荷㊁气动载荷非对称机动载荷15发动机停车气动载荷㊁惯性载荷㊁陀螺力矩发动机停车状态载荷㊃0521㊃第6期马凯超,等:舰载螺旋桨运输机发动机短舱飞行载荷设计2㊀设计模型2.1㊀全机机动仿真模型全机机动仿真的基本模型为飞机六自由度运动微分方程,详见文献[12⁃13]㊂工程实践中,如何从基本模型出发,针对不同机动/状态的特点建立细节模型,是更为迫切的需求㊂以偏航机动为例,机动仿真至少包含如下关键技术:①设计操纵面偏转㊁仿真飞机响应使侧滑角达到理论最大;②从连续机动过程中离散出载荷设计点,确保不遗漏严重载荷情况,且控制计算量;③确保机动仿真结果与设计规范的一致性㊂2.1.1㊀建模过程将某一偏航机动划分为如下2个过程:1)从方向舵突然偏转到最大超调侧滑考虑某飞机方向舵偏度δ按梯形输入(见图1)的开环响应㊂经过极短时间t1达到限偏δlim,设为特征点A;此时瞬时偏航角加速度㊆ψ达到极大值,如(1)式所示㊂Iz㊆ψmax=Nδδlim(1)㊀㊀引入副翼偏度ξ消除侧滑角β增大过程中的滚转力矩,使飞机达到最大超调侧滑角βmax,设为特征点B㊂但副翼偏转会阻滞侧滑角β的增大速率,用修正因子κ描述该效应,如(2)式所示㊂此过程中,飞机的俯仰力矩也在发生变化,引入升降舵偏度ε维持飞机法向载荷系数保持1.0㊂ε的理论推导较为复杂,实践中以时间间隔τ离散从特征点A到B的时间段t2-t1,在每一离散点求解飞机的俯仰力矩,配以相应的升降舵偏度㊂以上各操纵面偏度的仿真历程如图1所示㊂βact=κβκ=1-NδLδ/LξNδ1-NξLβ/LξNβìîíïïïï(2)式中:δ,ξ分别为方向舵偏度㊁副翼偏度;Lδ,Lξ,Lβ为滚转力矩各项导数;Nδ,Nξ,Nβ为偏航力矩各项导数㊂2)定常侧滑最大超调侧滑后飞机以震荡收敛的方式趋于定常侧滑,设达到定常侧滑为特征点C㊂对某飞机从B点到C点的仿真过程引入弹性修正,避免该过程的偏保守载荷设计,建模如(3)式图1㊀最大超调侧滑之前的偏航机动仿真所示㊂模型中新增了一个模态无耦合方程,模态力的弹性导数可参考文献[8]的理论推导;广义坐标qe以能消去刚体和弹性方程之间的惯性耦合项为约束选取㊂滚转力矩Le和偏航力矩Ne为新增项,由弹性模态变形产生㊂ṁv+mu̇ψ=YIx㊆ϕ=Lpp+Leqe+LξξIz㊆ψ=Nrr+Neqe+Nδδme㊆qe+cėqe+(ke-Qe)qe=Qrr+Qδδìîíïïïïïï(3)式中:Y为侧力;qe是广义坐标;ϕ,ψ分别为滚转角㊁偏航角;me,ce,ke分别为模态质量㊁阻尼㊁刚度;Qr,Qδ,Qe为模态力的弹性导数㊂2.1.2㊀典型载荷工况从2.1.1节产生的特征点A,B,C以及A到B之间的离散点中,选取出现操纵面偏度㊁三向角速度㊁三向角加速度极值的点,作为该偏航机动的载荷设计点㊂分析VMC(临界发动机停车时的最小操纵速度)到VD(设计俯冲速度)之间经历的偏航机动,汇集载荷设计点㊂每一载荷设计点对应着一个飞机高度㊁速度㊁迎角㊁侧滑角㊁载荷系数㊁螺旋桨拉力系数等状态参数和翼身组合体总载㊁尾翼总载等载荷参数的组合[6],这些即为某飞机从偏航机动筛选出的典型载荷工况㊂2.1.3㊀规范权衡以上偏航机动仿真需与表1中规范条款的约束相互权衡㊂例如规范第25.363条[10]对于横向限制载荷系数的约束为:此系数至少等于由偏航情况得到的最大载荷系数,但不小于下列数值:1)1.33;2)第25.333(b)条所述的飞行情况A的限制载荷系数的1/3 ㊂㊃1521㊃西㊀北㊀工㊀业㊀大㊀学㊀学㊀报第38卷若采纳该约束,则需对每一偏航机动逐点检查,剔除超出约束的载荷设计点㊂2.2㊀短舱气动载荷模型短舱尺寸大㊁外形不规则㊁处在螺旋桨滑流的强影响区域,对其分布式气动载荷建模如下:a)将每一个典型载荷工况中的状态参数变换到短舱局部坐标系下;b)对原始气动特性数据和压力分布数据进行状态插值,使其匹配于各典型载荷工况;c)划分面元,计算各面元形心处的压力系数,通过面积分获得短舱的气动力和气动力矩[1,5,8]㊂以上过程见(4)式αlocal=α+φ+arctanpy0uæèçöø÷-arctanqx0uæèçöø÷βlocal=β+ΔβCP,k=C0P,k+ΔCαlocalP,k+ΔCβlocalP,k+ΔCTcP,kF=-ðNk=1nkCP,kSkQM=-ðNk=1rkˑnkCP,kSkQìîíïïïïïïïïïï(4)式中:α,β为机身迎角㊁侧滑角;αlocal,βlocal为短舱局部坐标系原点(x0,y0,z0)处的当地迎角㊁侧滑角;φ为短舱安装角;Δβ为偏航机动引起的短舱侧滑角的增量;CP,k为第k个面元形心处的压力系数,其中k=1,2,3, ,N,N为面元总数;C0P,k,ΔCαlocalP,k,ΔCβlocalP,k,ΔCTcP,k分别为第k个面元形心压力系数原始值及其受短舱当地迎角㊁当地侧滑角㊁螺旋桨拉力系数影响的增量;Sk,nk,rk分别为第k个面元的面积(m2)㊁面元形心在局部坐标系中的单位法向量(垂直面元方向朝外为正)和形心方向矢量;Q为速压;F,M表示短舱的总气动力和气动力矩㊂2.3㊀其他模型2.3.1㊀惯性载荷模型完整的惯性载荷模型见文献[13],实践中可对全模型进行相应的简化㊂针对表2中某飞机各载荷计算情况特点,按机动类型建模如下(其中编号i=1,2, N表示短舱包络的所有集中质量附件,下同):a)对称机动忽略角加速度情况(见表2序号1 4)这种情况主要考虑垂直作用于短舱水平面的惯性载荷Fz,inertial=-ðNi=1nzGi(5)式中:Fz,inertial为法向惯性载荷;nz为飞机法向载荷系数;Gi为各附件质量㊂b)对称机动考虑角加速度情况(见表2序号5)Fz,inertial=-ðNi=1nzʃxi̇qgæèçöø÷GiMy,inertial=-JẏqFx,inertial=-ðNi=1zi̇qgGiìîíïïïïïï(6)式中:Fx,inertial为x向惯性载荷;My,inertial为y向惯性力矩;xi和zi分别为集中质量重心距飞机重心的x向㊁z向距离;̇q为俯仰角加速度;Jy为短舱对通过自身重心横轴的惯性矩㊂c)侧向惯性载荷情况(见表2序号7,8,12)Fz,inertial=-ðNi=1nyGi(7)㊀㊀但其绝对值不得小于Fz,inertial=ðNi=1̇p2yigGi(8)式中:ny为飞机侧向载荷系数;yi为水平面内集中质量重心距飞机重心的距离;̇p为滚转角加速度㊂d)非对称机动考虑角加速度情况(见表2序号10 11)偏航平面内Fy,inertial=-ðNi=1ny-xi̇rg-yir2gæèçöø÷GiMz,inertial=-JżrFx,inertial=-ðNi=1yi̇rgGiìîíïïïïïï(9)㊀㊀倾斜平面内Fz,inertial=-ðNi=1nz-yi̇pg-zip2gæèçöø÷GiMx,inertial=-JẋpFy,inertial=-ðNi=1zi̇pgGiìîíïïïïïï(10)式中:Fy,inertial为y向惯性载荷;Mx,inertial和Mz,inertial分别为x向㊁z向惯性力矩;Jx,Jz分别为短舱对通过自身重心纵轴和竖轴的惯性矩㊂2.3.2㊀陀螺力矩模型短舱的部分载荷计算情况需考虑2个转动部件的陀螺力矩:螺旋桨与涡轮转子㊂对于表2中的俯仰㊁偏航等机动情况和发动机停车状态,有㊃2521㊃第6期马凯超,等:舰载螺旋桨运输机发动机短舱飞行载荷设计My,gyro=rΩprop,max(Jprop+ηJrotor)Mz,gyro=qΩprop,max(Jprop+ηJrotor){(11)式中:My,gyro,Mz,gyro分别为y向和z向陀螺力矩;Ωprop,max为与各载荷情况相应的螺旋桨转速的最大值(rad/s);Jprop,Jrotor分别为螺旋桨和涡轮转子的转动惯量;η为发动机传动比㊂2.3.3㊀反扭矩模型表2中部分载荷情况需考虑螺旋桨反扭矩Mx,eng=-λPengΩprop(12)式中:Mx,eng为x向螺旋桨反扭矩;系数λ按设计规范的要求,对于涡轮螺旋桨为1.25[10];Peng为发动机轴功率,Ωprop为螺旋桨转速,这2个值根据表2中载荷设计情况的不同做配套变动(如起飞㊁巡航阶段均有规定的功率和转速),并取平均值㊂3㊀算㊀例3.1㊀偏航机动仿真结果一个完整的偏航机动仿真历程如图2所示,可见偏航角速度㊁角加速度等的极值出现在方向舵偏度曲线拐点附近,这些点最终都被筛选为短舱侧向典型载荷工况㊂图2㊀偏航机动仿真3.2㊀典型载荷工况筛选结果综合全机机动仿真结果,共筛选出318个针对短舱的典型载荷工况,包含163个对称机动工况,155个非对称机动㊁发动机停车等工况,其形式见表3㊂表3㊀典型载荷工况示例H/mα/(ʎ)β/(ʎ)δr/(ʎ)nynzTC机动/状态0-4.1-20-0.11.0VMC偏航32006.324.15.4-0.71.20.17VA偏航50001.2-12.6-2.91.11.1VD偏航50003.65000.01.00.10水平飞行0-11.2-1.0-0.50.0-1.00.0最小nZ非对称5.9000.02.00.01大nZ稳定俯仰0-3.99.4-0.6-0.41.00.05着舰构型侧向突风3.3㊀其他设计输入前文列出了针对某飞机短舱的载荷设计条款和设计范围,并获得了典型载荷工况㊂这里给出短舱的压力分布数据和质量分布数据等其他设计输入,从而使全套设计输入完整㊂某飞机的短舱(及螺旋桨)外形如图3a)所示;对短舱划分面元网格如图3b)所示㊂通过CFD计算,获得短舱表面压力分布㊂图4a)是某典型重量㊁全机巡航状态短舱3号框截面(属螺旋桨滑流强影响区)周向压力系数CP分布随迎角α的变化;图4b)是该截面在α=3ʎ时CP随拉力系数TC的变化㊂TC定义为图3㊀某飞机短舱及载荷计算网格TC=TQSW(13)㊃3521㊃西㊀北㊀工㊀业㊀大㊀学㊀学㊀报第38卷式中:T是单个螺旋桨产生的拉力;Q是速压;SW是机翼面积㊂可见随迎角改变,短舱上㊁下表面(θ=0ʎ,180ʎ,360ʎ附近)CP变化较为显著,且与翼面类部件相似,下表面由于受机翼干涉小而呈现更好的规律性;在中小迎角下,拉力系数的增大使短舱左㊁右表面正负压差增大,从而获得较大的侧向载荷㊂某飞机短舱各部分质量数据见表4,安装拉杆组件㊁主辅减震器㊁滑油及其他系统质量本文中不作赘述㊂表中G为质量,X,Y,Z分别为各质量块重心在全机坐标系下的坐标,Ix,Iy,Iz,Ixy,Ixz,Iyz为各质量块绕自身相应轴的惯性矩和惯性积㊂图4㊀短舱3号框截面压力分布数据表4㊀短舱质量数据名称G/kgX/mY/mZ/mIx/(kg㊃m2)Iy/(kg㊃m2)Iz/(kg㊃m2)Ixy/(kg㊃m2)Ixz/(kg㊃m2)Iyz/(kg㊃m2)螺旋桨292.09111.386 1.17293.48101.17100.756.112.350.87发动机12.742 0.97056.44447.74433.890.21-0.53-0.14壳体与挂架608.83813.300 1.052165.81649.32603.11-11.38-36.541.42起落架相关452.838244.19315.02114.6712.55-69.27-33.353.4㊀载荷计算结果对表3中的典型载荷工况分别计算气动载荷㊁惯性载荷㊁陀螺力矩和反扭矩㊂其中气动载荷与惯性载荷包含全机/局部坐标系下x,y,z方向的力㊁力矩分量;陀螺力矩和反扭矩只包含力矩分量㊂从中挑选出载荷分量的单值包线㊁组合包线的边界值,作为短舱的设计载荷㊂共得到26个设计载荷工况;表5列出了其中3个具有代表性的工况:表5㊀短舱设计载荷工况示例序号载荷项Fx/NFy/NFz/NMx/(Nm)My/(Nm)Mz/(Nm)机动构型1气动载荷5721.3-6564.88-15192.8759.8453014.5-21431.24惯性载荷11530.8-9313.8-65047.93151.39195828.3-49022.28陀螺力矩////-646.962474.82反扭矩///-20105.3//总载荷17252.1-15878.7-80240.7-16194.0248195.8-67978.7最大NZ急剧俯仰巡航2气动载荷5181.3-17111.4-17514.6-933.1254760.5-16951惯性载荷10611-8053.72-30237.9-4304.3452056-65995.4陀螺力矩2428.06668.46反扭矩-30305.7总载荷15792.3-25165.1-47752.6-35543.1109244.6-82277.9VD偏航巡航3气动载荷-203.922333.6856338.223618.9135-318.213202.046惯性载荷12633.31-242.463-26287.3839.848549809.83071.19陀螺力矩5910.435-9.652反扭矩-36888.5总载荷12429.3991.2228-25949.1-36029.73855402.023263.584最大着舰重量偏航着舰㊃4521㊃第6期马凯超,等:舰载螺旋桨运输机发动机短舱飞行载荷设计㊀㊀工况1包含短舱法向总载荷边界值,在最大法向载荷系数下的急剧俯仰机动中获得;由于短舱内装置㊁设备的质量较大,此情况下的惯性载荷远大于气动载荷,其中法向惯性力更是超过了法向气动力的4倍㊂工况2包含短舱侧向总载荷边界值,在设计俯冲速度(VD)下的偏航机动中获得,该机动的模拟引入了条款25.363(a)(1)中侧向载荷系数1.33的约束;此情况下侧向气动力的贡献大于惯性力,而法向则由于俯冲机动的特点,仍以惯性力为主㊂工况3为陀螺力矩边界值,在着舰构型㊁最大着舰重量㊁发动机最大拉力系数下的偏航机动中获得㊂综合这26个设计载荷工况,其中19个与惯性力/力矩的边界值相关,占73.1%;15个涉及气动力/力矩的边界值,占57.7%;5个与陀螺力矩相关,3个与反扭矩相关,分别占比19.2%与11.5%㊂可见惯性载荷与气动载荷是短舱设计载荷工况的主要贡献者㊂3.5㊀滑流影响螺旋桨滑流通过改变短舱表面的流场和压力分布,从而影响气动载荷项㊂以表3中 平飞加速 情况为例㊂该情况下飞机处于中高空㊁小表速㊁小迎角㊁平飞状态,通过调整螺旋桨拉力进行平飞加㊁减速配平,不做其他机动㊂表6列出的是此情况下短舱总气动力㊁短舱3号框以前部分(滑流强影响区)气动力随拉力系数TC增大而变化的情况,其中 增幅 一项均相对无动力状态而言㊂可见此情况下短舱气动力虽然不大,但随着螺旋桨滑流作用的增强,气动力增大的趋势非常明显㊂这与图4b)所示的压力分布变化的趋势是一致的㊂表6㊀某平飞加速机动短舱气动载荷增量TC3号框以前气动力/N增幅/%总气动力/N增幅/%无动力562.13-2966.31-0.01256.51123.533973.3333.950.061714.79205.054618.5055.700.12440.64334.185646.7190.364㊀结㊀论1)舰载螺旋桨运输机发动机短舱的法向主导载荷为惯性载荷,侧向主导载荷为气动载荷与惯性载荷;2)舰载螺旋桨运输机着舰时发动机处于最大拉力状态,在最大着舰质量的偏航机动中需关注短舱的陀螺效应;3)气动载荷与惯性载荷的边界值构成发动机短舱的主要设计载荷工况;4)螺旋桨滑流能显著改变短舱气动载荷,某些机动/状态下可使总气动力增大90%以上;靠近螺旋桨的区域甚至超过300%㊂参考文献:[1]㊀马凯超,徐岚玲,张建叶.舰载运输类飞机副翼飞行载荷设计[J].航空学报,2019,40(4):58⁃66MAKaichao,XULanling,ZHANGJianye.FlightLoadDesignofAileronofCarrier⁃BasedTransportCategoryAircraft[J].ActaAeronauticaetAstronauticaSinica,2019,40(4):58⁃66(inChinese)[2]㊀郭润兆,段卓毅,李小卫.舰载机机舰适配性体系研究[J].航空科学技术,2014,25(3):10⁃13GUORunzhao,DUANZhuoyi,LIXiaowei.StudyonAdaptationSystemofCarrier⁃BasedAircraft[J].AeronauticalScienceandTechnology,2014,25(3):10⁃13(inChinese)[3]㊀GOURED.EnablingtheCarrierStrikeGroup:theRoleoftheE⁃2andC⁃2[M].USA:LexingtonInstitute,2011[4]㊀张顺,郭少楠,庞辰,等.螺旋桨滑流对飞行器气动特性的影响机理研究[J].应用力学学报,2017,34(4):685⁃691ZHANGShun,GUOShaonan,PANGChen,etal.TheMechanismResearchoftheEffectsofSlipFlowEffectsonAircraftswithPropeller[J].ChineseJournalofAppliedMechanics,2017,34(4):685⁃691(inChinese)[5]㊀王仲燕.飞机设计载荷计算指南[M].北京:航空航天工业部,1990WANGZhongyan.AircraftLoadsDesignManual[M].Beijing:AeronauticsandAstronauticsIndustryMinistry,1990(inChi⁃nese)[6]㊀蒋祖国,田丁栓,周占廷.飞机结构载荷/环境谱[M].北京:电子工业出版社,2012JIANGZuguo,TIANDingshuan,ZHOUZhanting.LoadandEnvironmentSpectrumonAircraftStructure[M].Beijing:Publish⁃ingHouseofElectronicsIndustry,2012(inChinese)[7]㊀HOWED.AircraftLoadingandStructuralLayout[M].London:ProfessionalEngineeringPublishingLtd,2010[8]㊀WRIGHTJR,COOPERJE.IntroductiontoAircraftAeroelasticityandLoads[M].Chichester,England:JohnWiley&Sons㊃5521㊃㊃6521㊃西㊀北㊀工㊀业㊀大㊀学㊀学㊀报第38卷Ltd,2008[9]㊀朱自强,陈迎春,王晓璐.现代飞机的空气动力设计[M].北京:国防工业出版社,2011ZHUZiqiang,CHENYingchun,WANGXiaolu.AerodynamicDesignofModernAircraft[M].Beijing:NationalDefenseIndustryPress,2011(inChinese)[10]中国民用航空局.中国民用航空规章第25部[S].CCAR⁃25⁃R4CivilAviationAdministrationofChina.ChinaCivilAviationRegulationsPart25[S].CCAR⁃25⁃R4(inChinese)[11]丁亚修.民用飞机载荷计算研究与软件研制[D].西安:西北工业大学,2003DINGYaxiu.ResearchontheLoadCalculationMethodsandSoftwareofCivilAircraft[D].Xiᶄan:NorthwesternPolytechnicalUniversity,2003(inChinese)[12]埃特金.大气飞行动力学[M].何植岱,译.北京:科学出版社,1979ETKINB.DynamicsofAtmosphericflight[M].HEZhidai,Translator.Beijing:SciencePress,1979(inChinese)[13]‘飞机设计手册“总编委员会.飞机设计手册第9册[M].北京:航空工业出版社,2001TheEditorialBoardoftheHandbookofAircraftDesign.HandbookofAircraftDesign,Volume9[M].Beijing:AviationIndustryPress,2001(inChinese)[14]LOMAXTL.StructuralLoadsAnalysisforCommercialTransportAircraft:TheoryandPractice[M].USA:AIAAEducationSeries,1996FlightLoadDesignofNacelleofCarrier⁃BasedPropellerTransportAircraftMAKaichao,TANGChanghong,ZHANGJianye,NIUXiaofei,FANQingzhi(AVICtheFirstAircraftInstitute,Xiᶄan710089,China)Abstract:Thecarrier⁃basedpropellertransportaircrafthasacompactlayout,wherethelargenacelleinsizeandweightissensitivetopropellerslipstream,andthuscallsforsophisticatedflightloaddesignstudies,whicharestillinsufficientconsideringdomesticexperience.Indetail,thedesignmethodsonaerodynamicload,inertialload,gy⁃rostaticmoment,aswellasstudiesondesigncriteriaandmaneuversimulationtechnologyareshownforareferenceaircraft.Thedesignrangeappliedtothisnacelle sflightloadisfirstlydeterminedbyunderstandingandselectingthedesigncriteria.Thetypicalloadcasesofthenacellearederivedfromaircraftmaneuversimulation.ThedataofpressuredistributionunderaseriesofpropellerslipstreamstrengthsisobtainedbyCFDmethod.TheDesignLoadsandDesignLoadcasesofthenacellearecalculatedandselected.Theeffectsofthepropellerslipstreamarecom⁃paredinanexampleoftheincrementonaerodynamicloadinamaneuver.TheresultsshowthattheDesignLoadsofthenacelleareobtainedfromtheabruptpitchingmaneuverunderthemaximumnormalloadfactor(Nz),theya⁃wingmaneuverundertheDesignDiveSpeed(VD),andthemaximumpropellerpullunderthemaximumlandingweight;thetransverseloadsofthenacellearedominatedbytheaerodynamicload,andthenormalloadsaredomi⁃natedbytheinertialload,inwhichtheinertialforceexceedstheaerodynamicforceby4timesundertheextremecircumstances.Insomemanoeuvresorstatus,thetotalaerodynamicforceofthewholenacelleisincreasedbyabove90%duetopropellerslipstream;thefrontpartofthenacellewhichisclosetothepropellerseesamuchbiggerin⁃crement.Keywords:carrier⁃basedpropellertransportaircraft;nacelle;aerodynamicload;inertialload;designcriteria;ma⁃neuversimulation;propellerslipstream;designloadcases©2020JournalofNorthwesternPolytechnicalUniversity.ThisisanOpenAccessarticledistributedunderthetermsoftheCreativeCommonsAttributionLicense(http://creativecommons.org/licenses/by/4.0),whichpermitsunrestricteduse,distribution,andreproductioninanymedium,providedtheoriginalworkisproperlycited.。
第二十八届(2012)全国直升机年会论文舰载直升机对舰面环境的需求研究贾广生常斌姜滨(海军装备部,北京100036;海军装备研究院,上海200436;中航工业602所,景德镇333001)摘要:为了能够提升舰面环境对舰载直升机的支撑能力,为了舰载直升机能够在起降甲板安全起降、能够更加有效的完成使命任务,本文从舰载直升机的使用环境和起降作业特点出发,依据影响机舰适配性的主要舰面因素,重点从甲板尺寸、助降系统和舰船运动及舰艉流场等三个方面研究分析了舰载直升机舰面安全起降的需求。
关键词:舰载直升机;起降;舰面环境;需求1 概述为维护海洋权益、保障领海安全及保护远洋航线,各国海军迫切需要现代化的武器装备。
直升机以其独特的垂直起降、悬停、侧飞及后飞等飞行能力越来越受到海军的重视,舰载直升机已成为现代海军的重要组成部分。
舰载直升机在海上能够担负反潜反舰、侦察巡逻、搜寻救护、空中预警以及电子对抗、扫布水雷等多种使命,在现代海战及非战争军事行动中日益显示出其特有的作用和威力,具有“空中轻骑兵”的美誉。
舰载直升机是指在驱逐舰、护卫舰、两栖运输舰以及航空母舰等大中型水面舰艇上搭载、系留和起降的海军直升机。
与常规陆基直升机相比,舰载直升机有其特殊的使命任务、使用环境以及技术特点[5]。
舰载直升机在舰面起降甲板安全起降,是对舰载直升机最基本的要求,也是完成其它使命任务的前提。
甲板起降是牵涉机、舰两个平台相互协调配合的动态过程,也是舰船水动力学、直升机空气动力学、结构动力学、飞行力学及控制等多领域、多学科相互耦合的综合问题[2]。
具体说来,除了直升机平台本身,起降甲板尺寸大小、助降设备、舰船运动及舰艉流场等与舰船平台有关的因素也都会影响舰载直升机的舰面作业。
当前,舰载直升机已成为世界各国海军舰艇部队的标准配置。
为了能够提升舰面环境对舰载直升机的支撑能力,为了舰载直升机能够在起降甲板安全起降、能够更加有效的完成使命任务,有必要开展舰载直升机对舰面环境的需求研究。
航空母舰,无疑是近来中国领域里最受关注的热点,也是各类军事期刊耗费版面最多的一个话题。
笔者观察,大家的兴奋点多集中在航母战略、航母建造技术、舰载机、航母战斗群的作战能力等方面,却似乎忽略了一个重要的问题――机舰融合。
机舰融合问题的核心是如何保证舰载机安全、顺利地在航母甲板上完成起飞和降落。
舰载飞机和陆基飞机相比,最大的区别在于舰载飞机的起飞和降落是在一个有限的空间,又是在海上运动的平台上进行。
正是由于这种差别的存在,使舰载机的起飞和降落变得异常困难、异常危险。
比如,苏联搞苏-33的时候,仅在地面模拟训练(尼特卡)阶段,就发生了三起严重事故,至今俄罗斯能上舰执行任务的固定翼飞机的飞行员依然屈指可数。
目前,世界上舰载机起飞方式主要有垂直起飞、斜甲板滑跃起飞和弹射起飞等三种,而降落大多采用拦阻着舰方式。
本文着重介绍有关弹射起飞、拦阻着舰的空气动力学和飞行力学问题。
弹射起飞一、弹射对于一架放置在机库里待起飞的飞机来说,先要用升降机将其提升到飞行甲板上。
然后,按照起飞要求,预先设置平尾和襟副翼的偏角,平尾上偏一个角度,以便使飞机获得速度后立即产生一个上仰操纵力矩;襟副翼下偏一个角度,实际上是改变机翼翼型,以增大飞机的升力系数。
接着,飞行员进行飞行前检查,包括发动机试车、检查并调整相关控制器。
飞机滑行进入弹射器就位,将安装在前起落架上的弹射拉杆连接到弹射器拖曳装置上,使飞机稍低头,再用牵制杆把飞机与甲板上的牵制固定座连起来,使飞机固定在弹射器动力冲程的初始端。
飞行员把油门加到起飞位置,弹射器开始工作。
当牵制杆上释放部件的载荷达到释放值时,飞机被释放,开始弹射加速滑行。
滑行到弹射器冲程末端,飞机达到起飞离舰速度,飞机自动脱离弹射器,同时前起落架储存的能量开始释放,飞机迎角瞬间达到起飞角度,飞机飞离母舰。
在弹射起飞中,确定最小弹射末端速度是最重要的工作之一。
因为这个速度越大,飞机获得的升力就越大,飞机就越安全。
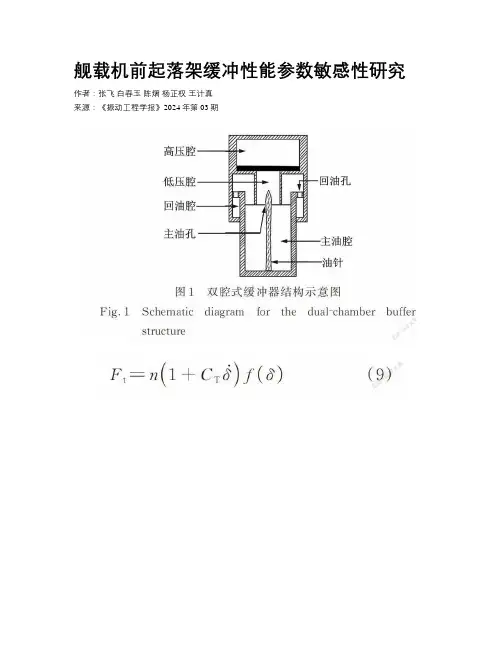
舰载机前起落架缓冲性能参数敏感性研究作者:张飞白春玉陈熠杨正权王计真来源:《振动工程学报》2024年第03期摘要為了同时满足缓冲和突伸性能,舰载机前起落架常采用双腔缓冲器设计。
以某型机前起落架为研究对象,建立前起落架缓冲性能分析动力学模型,并将仿真计算结果与试验结果进行验证对比,验证理论模型的有效性和正确性。
对缓冲器高、低压腔初始压力以及体积占比进行参数敏感性分析。
结果表明,高、低压腔初始充填压力和体积占比对起落架缓冲性能的影响有别于它们对突伸性能的影响,所以对舰载机前起落架缓冲器的设计需不断优化,同时兼顾缓冲和突伸性能。
关键词舰载机起落架; 缓冲性能; 双腔缓冲器; 落震试验; 落震动力学引言舰载机一般采用固定下滑角的方式着舰,下沉速度可达7 m/s甚至更快,是陆基飞机的2~3倍[1‑3]。
舰载机起落架作为飞机在着舰过程中主要的承力和缓冲部件,所吸收的能量是陆基飞机的4~6倍[4‑5],而起落架的缓冲性能及结构可靠性都需借助落震试验或仿真模拟的手段进行验证。
舰载机前起落架缓冲器常采用双腔式设计,这样不仅能满足大下沉速度下飞机的着舰需求,提高承载能力[6],也能通过释放储存在高压腔内的高势能,在飞机离舰起飞时提供足够的姿态角[7]。
另外,低压腔较低的弹簧刚度有利于提高飞机滑跑过程中乘员的舒适度。
这说明舰载机起落架双腔式缓冲器设计兼顾了突伸和缓冲两项功能[8]。
一般双腔式缓冲器的高、低压腔通过浮动活塞分离,当缓冲器内的空气弹簧力克服低压腔压力后,高压腔开始启动,此时双腔同时工作[9]。
所以,面对舰载机起落架复杂的使用环境和功能需求,双腔缓冲器的结构布局对于起落架缓冲支柱设计至关重要。
起落架缓冲器不同的充填参数和结构参数对其工作性能的影响是不同的,部分参数以很小的幅度调整就会使缓冲性能发生显著的变化。
同时也有部分参数变化对缓冲性能的影响很小。
崔俊华等[10]利用多体系统仿真软件对舰载机前起落架的缓冲性能进行仿真分析,研究了落震质量以及油针面积、形状对起落架缓冲特性的影响。
航母舰载机的作战半径与打击范围航母舰载机是现代海军力量的核心组成部分,具备远程打击、侦察、战斗和反制能力。
其作战半径和打击范围不仅直接影响航母战斗力的发挥,也体现了海军远洋作战的能力。
本文将探讨航母舰载机的作战半径和打击范围以及对海军作战的重要性。
一、作战半径的定义和影响因素作战半径是指航母舰载机在出动后能够实施作战行动的最大有效距离。
作战半径的确定受到多种因素的制约,主要包括以下几个方面:1. 舰载机的燃料携带量:燃料是航母舰载机远程作战的关键因素之一。
舰载机需要携带足够的燃料保证作战行动的持续性和覆盖范围。
2. 机载武器负载:舰载机携带的武器负载对作战半径也有一定的影响。
武器负载越重,航程就越短,作战半径也会受到一定程度的限制。
3. 空中加油能力:部分航母舰载机具备在空中加油的能力,可以通过加油机为其提供燃料补给,从而延长作战半径。
二、航母舰载机的作战半径和打击范围是以航母为基准进行计算的。
一般而言,航母舰载机的作战半径可以达到数百到数千公里,打击范围则取决于舰载机携带的武器类型和数量。
1. 近海作战:在近海作战中,航母舰载机可以通过舰载导弹、空对空导弹和舰载轰炸机等多种武器实施打击。
作战半径可以覆盖周边的海域,并有效地打击敌方舰艇、飞机和岸防设施。
2. 远洋作战:在远洋作战中,航母舰载机的作战半径将会更加重要。
航母需要通过航空母舰编队的迅速机动,将舰载机投送到更远的海域。
打击范围可以覆盖更多的目标,包括对敌方基地、船只和岸防设施等进行打击。
三、航母舰载机作战半径与打击范围的重要性航母舰载机的作战半径和打击范围直接决定了航母作战能力的强弱,也关系到整个海军作战的成功与否。
具有较大作战半径和广阔打击范围的舰载机,能够覆盖更广泛的海域,实施更深入的打击行动,有效压制敌方军力。
此外,作战半径和打击范围还直接影响作战效率和航母编队的生存能力。
较大的作战半径可以延长作战时间,提高编队的持续打击能力;广阔的打击范围有助于舰载机在遭遇敌方反制时迅速转换目标,保证作战的连贯性和可操作性。
航母的舰载机起降技术作为现代海军中最强大的舰艇之一,航母拥有强大的实力和战斗能力。
而航母的核心装备之一,就是舰载机。
舰载机起降技术是航母运用舰载机实施起降的一套复杂而又精密的程序。
本文将从舰载机的分类和特点、起降流程、技术挑战及突破等方面论述航母的舰载机起降技术。
一、舰载机的分类和特点舰载机是专为在航母上起降和作战而设计的飞机。
根据用途和型号,可以将舰载机分为多种不同的类型,如战斗机、侦察机、直升机等。
舰载机相对于陆基飞机有着独特的特点。
首先,由于舰载机需要在有限和狭窄的空间上进行起降,因此其起降时所需的速度、重量和弹药配置等都需要进行特殊设计。
其次,由于舰载机的起降受到舰船在海上运动的影响,舰载机必须具备良好的适应性和稳定性。
最后,舰载机需要在不同的气候和海况条件下进行起降,因此对于其风阻、耐水性和对恶劣环境的适应能力也有较高要求。
二、舰载机起降流程舰载机的起降是一项高危、高难度的任务,需要舰载机飞行员具备高超的飞行技术。
起降流程一般可以分为准备阶段、出舷、接管和起降四个阶段。
首先,在准备阶段,飞行员需要进行飞行准备、通信和导航等工作。
其次,出舷阶段是指飞行员将舰载机从停放区驶离并进入起降区的过程。
然后,在接管阶段,飞行员需要与甲板上的甲板柜员进行无线电联系,确保起降过程的安全顺利。
最后,起降阶段是舰载机在甲板上进行起飞和降落的过程,飞行员需要准确地掌握速度、高度和角度等参数,以保证成功完成起降任务。
三、舰载机起降技术挑战及突破舰载机起降技术面临着诸多挑战。
首先,由于起降甲板狭小,飞行器在起降过程中需要克服成倍增加的风阻和阻力,飞行员在飞行姿势和技术上都需要有较高的要求。
其次,起降过程中舰船的颠簸运动会对舰载机的稳定性产生影响,飞行员需要准确判断舰船的姿态来进行相应的调整。
最后,海况和气候也是舰载机起降的重要考虑因素,飞行员需要根据实际情况做出智能化判断和决策。
为了突破舰载机起降技术的挑战,科学家、工程师和飞行员们进行了大量的研究和改进。
着舰环境对舰载机着舰的影响分析舰载机着舰环境是指着陆舰舰面上的气象、海洋环境、舰船结构等因素对舰载机着舰操作的影响。
这些因素对着舰的成功与否具有重要影响,因此着舰环境的分析是航空母舰上空中作战任务中必不可少的环节之一。
一、气象环境舰载机着舰的气象条件对着舰舰载机起降成功率具有直接影响。
气象条件主要包括风速、风向、能见度、云层高度等。
其中,风速和风向最为重要。
1. 风速风速对舰载机着舰的影响是非常显著的。
高速风可使舰载机顺风着陆或逆风起飞,但也会加大着陆时的垂直速度和着陆决断高度,增加舰载机坠落的概率,降低着舰的安全性。
此外,风速高于限制值时,着舰舰员将无法进行安全有效的信息传递,给着陆操作增加难度。
2. 风向风向对舰载机着舰的影响同样很大。
一般来说,顺风着陆对于舰载机无疑是最为理想的着陆方式。
而逆风着陆时,舰载机发动机较难掌握正确的速度和进场高度,可能出现抖动、卡壳等现象。
因此,在实际操作中,逆风着陆通常是尽量避免的。
二、海洋环境海洋环境主要包括海浪、海况和潮汐等因素。
这些因素对于舰载机起降操作具有很大的影响。
目前,舰载机起降的最大阻碍因素之一就是海浪。
海浪能影响舰载机着舰的性能,尤其是降低舰载机低空飞行稳定性。
在大浪状态下,舰载机在瞬间失去重心,振动较大,而且着陆的水平点相对不稳定。
碎浪状态下,着陆时舰载机容易发生滑行,增加着陆难度和风险。
三、舰船结构舰载机着舰时舰船结构也会对其产生影响。
舰船结构主要包括航母甲板、索具等,这些要素直接影响到舰载机着舰的安全和稳定。
1. 航母甲板为了保证舰载机着舰的安全性,航母甲板必须保持平整,不应有极大凹陷或起伏。
此外,舰载机着陆时还需要注意甲板上涂层的摩擦系数、坑洼处理和迎风方向等要素。
2. 索具索具主要是指甲板边缘四个弹射器和四个拦阻索具,它们在舰载机出入航母时起关键作用。
弹射器能够提供舰载机所需的起飞加速度,正确定位舰载机到起飞位置;而拦阻索具则可以防止舰载机因速度过高而超过舰尾。

当代美军航母舰载机起降操作一、飞行甲板人员飞行甲板的人员穿着不同颜色的马甲来区分不同的职责。
空军军官Air Officer空军军官(也叫老板)及其助手(小老板)对一切操作负责,包括:机库、飞行甲板、以及航母周围5海里范围内的飞机。
他们在视野范围内指挥航母控制区(飞行甲板及航母周围5海里范围)的所有飞行器,飞机的所有行为都要得到他们的批准才能进行。
弹射官Catapult Officer弹射官由海军飞行员担任,对弹射器的维修和操作负责。
他们确认起飞时有适当的风(方向、速度),以及离开甲板前飞机有足够的速度。
舰载机调度官Aircraft Handling Officer监督管理航母飞行甲板上、机库的所有的飞机调度,并协助航空军官管理飞行作业。
飞机引导员Aircraft directors身着一套黄色衣服,使用复杂手势信号,负责引导飞机在机库和甲板上的移动。
着陆信号官Landing Signal Officer由资深飞行员担任,使用灯光和无线电通讯,负责在可视范围内监视飞机下滑角度、姿态,引导飞机着舰时候准确降落。
拦阻官Arresting Gear Officer负责飞机阻拦设备操作、设置以及甲板降落区准备。
二、循环操作Cyclic operations即飞机起飞和着陆编为一组。
在航母上起飞和降落最好是不同时的,循环操作在美军航母上是标准操作。
一个循环通常为1.5小时。
通常12-20架飞机编成一组,依次滑行、弹射起飞,一般15分钟可以完成。
第一组编队起飞完毕,大约1小时后第二组编队就准备就绪可以起飞了。
一组飞机全部起飞后,腾出甲板空间给准备降落的飞机。
第二组飞机编队起飞后,第一组飞机编队就可以在航母里维修、加载弹药、油料,同时检查甲板,准备作为下一组编队起飞。
三、起飞前前45分钟,机组人员检查,飞机就位。
前30分钟,起动飞机,飞行前检查完毕。
前15分钟,飞机从停机位滑行至弹射器,航母转向朝向风向,喷流偏向板升起,飞机外观最后检查、负载弹药检查。
航母的舰载机起降极限技巧的考验航母,作为现代海军力量的象征,是一种能够携带大量舰载机并用于战斗行动的战舰。
而舰载机的起降是航母上最为重要、最具挑战性的环节之一。
本文将介绍舰载机起降的极限技巧考验以及应对方法。
在舰载机起降的过程中,包括多种要素与因素的综合运用。
首先,航母本身的稳定性和动力性能决定着舰载机起降的可行性与安全性。
其次,飞行员的技巧和经验也是至关重要的,他们需要掌握高超的飞行技巧和出色的判断能力。
此外,舷侧风、航母舰载机甲板尺寸、仰角限制以及地形等因素也对舰载机起降构成挑战。
航载机的起飞操作是舰载机运用弹射器首次取飞的过程。
弹射器通过蒸汽或电磁力将舰载机从舰面迅速加速并抛出,使其迅速起飞。
在这个过程中,飞行员需要准确地掌握起飞的节奏和舰载机的姿态,以确保安全顺利地完成起飞动作。
同时,飞行员还需要考虑舰载机的重量、速度、气象条件等因素,以调整起飞的参数,以确保起飞的顺利进行。
而舰载机的降落则需要飞行员以极高的飞行技巧和决断力来应对动态复杂的环境。
在舰载机降落的过程中,飞行员需要精确地对准跑道和降落点,并且在舰载机接触着陆甲板之前,将飞机保持在恰当的高度和姿态上。
这就需要飞行员熟练地运用自身飞行经验和判断力,准确地感知和控制舰载机的动态表现,并及时做出相应的飞行调整。
为了确保舰载机起降的安全性和成功率,航母和飞行员需要配合紧密、无误的协同行动。
航母必须提供一个平稳的起降甲板,保持恰当的速度和航向,以便为舰载机提供合适的起飞和降落条件。
飞行员则需要具备高超的飞行技巧和冷静的心态,能够准确地控制飞机并与舰载飞行指挥员进行有效的沟通。
另外,舰载机起降还面临着一系列的困难和挑战。
例如,舷侧风和甲板仰角可能会对起降影响产生不利影响。
舷侧风会使得舰载机在起飞和降落时偏离预定方向,飞行员需要通过调整飞机姿态和飞行参数来克服这一挑战。
而甲板仰角则需要飞行员准确地判断舰载机与甲板的距离和位置,并及时做出相应的动作来保证舰载机起降的安全与顺利进行。
着舰环境对舰载机着舰的影响分析作者:焦晓辉王鹏来源:《科技创新与应用》2019年第16期摘; 要:相比常规陆基飞机降落来说,舰载机着舰面临着更加复杂的着舰环境,着舰的要求要苛刻得多,难度要大得多,影响着舰安全的因素也多得多。
文章通过分析舰载机着舰过程中面临的主要环境因素对安全着舰的影响及缓解措施,有助于降低舰载机着舰风险,提高着舰成功率。
关键词:舰载机;着舰环境;着舰安全中图分类号:U674; ; ; ; ;文献标志码:A; ; ; ; ;文章编号:2095-2945(2019)16-0020-02Abstract: Compared with the conventional land-based aircraft landing, carrier-based aircraft landing is facing a more complex landing environment, landing requirements are much harsher,much more difficult, and there are many factors that affect the safety of the ship. This paper analyzes the influence of the main environmental factors on the safe landing of carrier-based aircraft and the mitigation measures, which is helpful to reduce the risk of carrier-based aircraft landing and improve the landing power.Keywords: carrier aircraft; landing environment; landing safety1 概述舰载机能否迅速、可靠地在航母上进行起降,是航空母舰形成作战能力的基础和根本,同时由于着舰比起飞难度要更大,面临的挑战和风险以及飞行员掌握相关技术的代价也要大的多,因此是保证航母战斗力的最主要的技术条件。
舰载机起飞时的注意事项
舰载机起飞时的注意事项包括:
1.风向:舰载机起飞时,一定要选择逆风方向。
因为逆风起飞会增加机翼周围空气的
流速,提高翼面效率,给飞机带来尽可能大的空气升力,同时提高飞机的航向稳定性,使飞机起降更安全并缩短滑跑距离。
而顺风起飞则会增加起降的难度和造成事故的可能性。
2.飞机类型与起飞顺序:在舰载机起飞时,飞行甲板前段约100米为滑行区域,各机
种会按照重量由小到大的顺序起飞,依次是舰战、舰爆和舰攻。
这是为了保证飞机能够顺利起飞,同时避免相互干扰。
3.安全措施:舰载机起飞是高风险科目,事故率远高于陆地机场。
因此,在舰载机起
飞前,航母会先派出搜救直升机在航母上空待命,以保护飞行员的安全。
此外,预警机也会在航母上空提供不间断地监控,随时掌握战场动态,对来袭威胁进行预警,并引导己方战机做出应对。
4.甲板操作:在舰载机起飞过程中,甲板上的工作人员必须密切配合,确保飞机能够
顺利起飞。
这包括指挥飞机的滑行、调整飞机的姿态、操作弹射器等。
同时,甲板上的消防和救援设备也必须随时待命,以应对可能出现的紧急情况。
5.飞机状态检查:在起飞前,飞行员需要对飞机进行仔细的状态检查,确保飞机的各
个系统都处于正常工作状态。
这包括发动机、导航系统、武器系统等。
如果发现任何异常或故障,必须立即进行处理或停止起飞。
6.与塔台的通信:在起飞前,飞行员需要与航母塔台进行通信,确认起飞计划和飞行
路线。
在飞行过程中,飞行员还需要与塔台保持联系,随时报告飞行状态和位置。
842022年5月上 第09期 总第381期0. 引言舰载直升机是指搭载在舰船上的直升机,是我国海军的重要组成部分,主要遂行反潜反舰、空中预警、布雷扫雷、垂直补给、以及侦察救护等任务[1]。
当舰船在海上航行时,由于受海浪特性、自身运动状态的影响,舰船自身会出现横摇、纵摇、横荡、纵荡等运动。
与陆地上相比,舰载直升机停留在舰船甲板上,不仅要承受环境风带来的风载,还要承受舰船给舰载直升机的惯性载荷[2-3]。
因此,若要使舰载直升机能够平稳、安全地停留在舰船上,就必须对直升机进行系留,尤其在海况较差时,舰载直升机机体将会承受各个方向的过载,且载荷较大。
如果某一方向载荷超出了机体结构或者系留装置的承载能力,则直升机机体结构、系留装置都可能遭到破坏。
当前,直升机舰面系留普遍采用的是定点系留的方式,即先确定舰载直升机在舰船上的停放位置,再根据系留窝分布确定直升机系留方案并进行评估。
但在实际使用中,舰载直升机一般不能准确停放在系留方案中要求的位置,导致实际系留方案与理论系留方案存在偏差,可能使直升机结构和系留装置的受力超过其承载能力,如图1所示。
因此,在系留方案设计阶段,需给出直升机的停放范围,作为舰上系留操作的限制条件,以避免直升机结构和系留装置发生破坏。
本文通过建立舰载直升机系留载荷计算模型,给出了一种舰载直升机舰上停放范围的计算方法。
图1 停机偏差示意图1. 舰载直升机系留载荷计算模型1.1 有限元模型采用有限元的方法计算直升机舰面系留载荷,有限元模型如图2所示。
以直升机重心为系留对象的中心,分别连接各起落架接地点与各系留环,作为一个刚体进行分析。
各系留环与对应的系留窝之间建立杆单元,用于模拟系留收稿日期:2022-02-18作者简介:赵悦(1996―),男,蒙古族,辽宁阜新人,硕士研究生,助理工程师,研究方向:直升机总体设计。
舰载直升机舰上停放范围计算方法与研究赵悦 周琪琛(中国直升机设计研究所,江西景德镇 333001)摘 要:舰载直升机在舰上系留时,实际系留位置与理论系留位置存在偏差,可能导致直升机结构和系留装置的受力超过其承载能力。
JSSG-2001A 中舰载飞机进近要求陈 晨1 谢 勇2 丁 祥3(1.中国航空综合技术研究所,北京 100028;2.海军装备研究院规范所,上海 200235;3.海军航空兵学院教研部,辽宁 葫芦岛 125001)[摘要] 通过对国外舰载飞机进近标准的研究,从下滑道转移机动、视界、失速速度裕量、 飞行控制限制速度、大油门响应、小油门响应、飞行品质7个方面,详细分析了JSSG-2001A 中 对于舰载飞机进近的要求,为我国规范舰载飞机的进近要求,制定相关标准提供参考。
[关键词] JSSG-2001A ;进近;标准[中图分类号] V271.4+92 [文献标识码] C [文章编号] 1003–6660(2013)04–0004–04引言安全着舰,20世纪50年代,英国海军开展了斜角甲板和镜面光学助降系统的研究,美国海军最终采用了 这种创新,使得超音速、后掠翼飞机的着舰更加安 全。
斜角甲板扩展了着舰区域,以适应长距离降落和逃逸的要求;镜面光学助降系统体积更大、照明效果更好,能够给飞行员提供更为明确的偏差指示。
舰载飞机进近着舰过程一般包括:通场、第 一次180°减速转弯、第二次180°减速转弯和最终 着舰。
其中,最终着舰阶段是进近着舰过程最为重 要的阶段。
与其它进近着舰阶段相比,最终着舰阶 段对飞机的飞行性能和飞行品质都提出了更高的要求。
美军对此阶段进行了进一步划分,在文献[1]中指出“在舰载机最终进近时,需要具备快速修正下滑道误差的能力”,在该报告的图29中给出了舰载 机进近任务剖面图,将最终着舰阶段划分为开始段(5000 ft~4000 ft )、中间段(4000 ft~2000 ft )、 接近段(2000 ft~600 ft )和舰艉段(600 ft~0 ft ), 与常规陆基飞机的着陆相比,舰载飞机着舰面 临一系列复杂、多变的条件,例如,海上恶劣的环 境、航母甲板不稳、有限的着舰区域等,其相应的 事故率更高。