GPS结构设计规范
- 格式:doc
- 大小:73.00 KB
- 文档页数:2
gps点位布设的基本要求
GPS点位布设的基本要求首先是要求有较好的防水性能,易安装和
使用,有可靠的记录和存储能力,能够长时间稳定工作,耐久性要好。
第二,GPS点位布设的位置要求足够工程实施,位置要求对GPS信号衰
减和遮挡有一定的容忍度,不要选择过大的距离或者高大的建筑物作
为GPS点位布设的位置;第三,GPS点位要求有明确的标识,以方便日
后维护、查找,避免混淆;第四,要求GPS点位布设安装过程要简单
易行,且耗时短,节省成本,不影响正常使用;最后,在测量中,GPS
点位要求设置可靠,必须确保点位准确无误,精度要达到布放作用要求。
竭诚为您提供优质文档/双击可除gps全球定位系统规范篇一:全球定位系统gps测量规范(20xx)不合理之处a:最近遇到一个关于规范上的问题,全球定位系统gps 测量规范上有这么一个规定,静态基线处理时,关于基线弦长中误差,固定误差a与b只能采用仪器的标称精度,问题随之而来,如果某些不良商家给自己的标称精度很高,比如5+1,而旧规范可以引用10+1,旧规范容易通过精度评定,而新规范就太难了。
新规范那岂不是太坑人了吧?新规范要求是这样的旧规范要求是这样的太坑人了,不管bcde级,都得按照仪器标称精度来评定,很不合理。
如果这么考虑问题的话,今后的一级或者二级导线就不是按照固定的相对误差来评定了,而是与仪器的标称精度有关了。
如果真这样的话,说不定低精度的仪器可以通过精度评定,高精度仪器测得的导线成果反而通不过了。
毕竟,仪器鉴定单位并没有对商家的标称精度a与b给出具体的鉴定数值,或者对商家提供的标称精度给出合理与否,真是与否的结论另外,规范允许在基线处理时运用商家的提供的随机处理软件,而很多随机处理软件本身就有很多致命性错误。
这再次让不良的仪器厂家钻漏洞,夸大自己仪器标称精度的同时,商家开发出来的软件又低门槛地允许通过很多不合格基线通过了精度评定。
b:旧规范就是很合理的,比如c:问题是,新规范中,我就不知道在做d级gps测量时,a与b的具体取值了,按照新规范要求,我使用的仪器不同,a与b的具体取值就会不同。
这样的话,我如果拿到一批仪器,假如商家的标称精度为:a=5,b=1ppm,标称精度很高(但是仪器鉴定单位并没有对商家的标称精度a与b给出具体的鉴定数值,或者对商家提供的标称精度给出合理与否,真实与否的结论。
)仪器的真实精度是这样的:a=10,b=5ppm,这样的话,我用这批仪器在做d级gps控制测量内业精度评定时,运用a=5,b=1ppm,不能通过精度评定;运用真实的标称精度a=10,b=5ppm,我就很容易通过精度评定了。

1 简介TDD网络是一个时分网络,各基站之间需要严格同步,外场TDD基站采用了GPS作为同步时钟。
基站同步到GPS的功能通过基站中的主控板上的时钟模块来实现,时钟模块接收并解析GPS天线信号,获取GPS卫星时间作为基站的同步时间,同时向基站提供作为基准信号。
在GPS系统中,GPS接收机的灵敏度是影响GPS应用范围的非常关键指标,是指GPS接收机可以正常工作所需的输入最小信号强度,GPS接收机冷启动灵敏度受信号捕获、比特同步、导航电文解调灵敏度限制,一般GPS接收机的冷启动灵敏度要求在-147dBm以上。
在实际的TDD基站GPS的工程应用条件下,对外接馈线的长度,中继放大器的数量,使用的功分器的数量等有一个量化的限制,使单站BBU或者多网元BBU 共享GPS信号。
2 工作原理在基站中与同步GPS相关的部分主要包括:GPS天线、避雷器、GPS馈线和时钟模块中的GPS接收机、功率放大器(选配)。
时钟模块上的GPS接收机负责接收GPS天线传输的射频信号,然后进行变频解调等信号处理,向基站提供1pps 信号,进行同步。
由于GPS天线安装在室外,容易遭受到雷击,所以安装时GPS天线安装抱杆和天线外面的金属圆筒和天线LNA的地分开,避免引雷上身,但同时考虑到还有一些感应雷,为了保护室内的设备,一般在馈线穿墙之后在室内增加一个避雷器,如图1所示。
为了保证卫星同步,进入GPS接收机的接收电平必须满足接收机灵敏度的要求。
厂家提出了用接收机外部增益这个指标来量化链路中的衰减,指导安装,其定义就是从GPS天线到GPS接收机输入端的增益,即GPS天线增益减去链路中的衰减。
目前使用的GPS接收机是U-BLOX LEA-6T,GPS接收机处于激活状态接收的最低增益按照15dB计算,用于补偿射频线缆、连接器、避雷器和功分器损耗。
图1 GPS系统框图3 产品介绍3.1 GPS天线GPS天线有两种功能:接收、放大卫星信号;由它主要由无源微带天线、滤波器、低噪声放大器等组成。
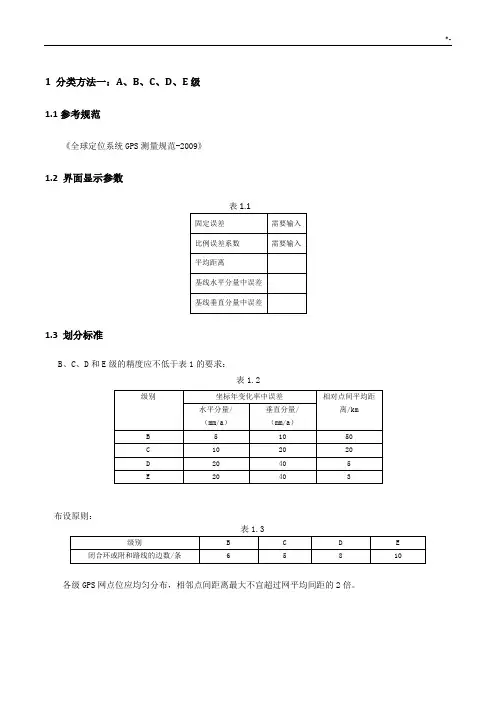
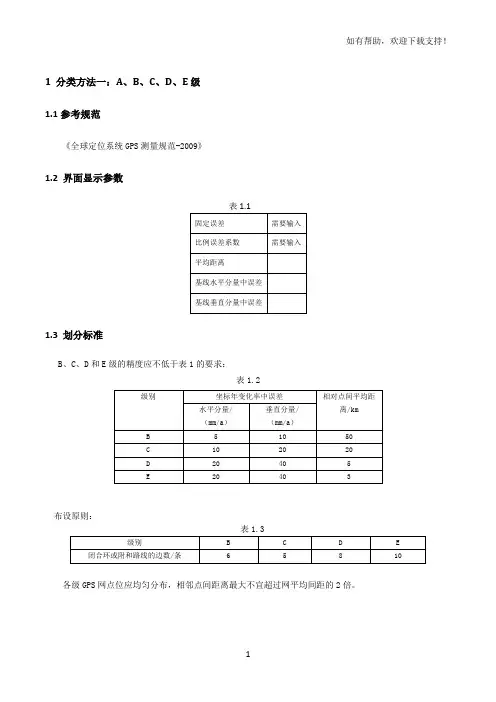
1 分类方法一:A、B、C、D、E级1.1参考规范《全球定位系统GPS测量规范-2009》1.2 界面显示参数1.3 划分标准B、C、D和E级的精度应不低于表1的要求:表1.2布设原则:表1.3各级GPS网点位应均匀分布,相邻点间距离最大不宜超过网平均间距的2倍。
接收机的选用:表1.4级别 B C D、E单频/双频双频/全波长双频/全波长双频/单频观测量至少有L1、L2载波相位L1、L2载波相位L1载波相位同步观测机数≥4 ≥3 ≥2观测:表1.5级别级别B C D E卫星截止高度角/度10 15 15 15同时观测有效卫星数≥4 ≥4 ≥4 ≥4有效观测卫星总数≥20 ≥6 ≥4 ≥4 观测时段数≥3 ≥2 ≥1.6 ≥1.6时段长度≥23h ≥4h ≥60min ≥40min采样间隔30 10-30 5-15 5-15注1:计算有效观测卫星总数时,应该各时段的有效观测卫星扣除期间的重复卫星数注2:观测时段长度,应为开始纪律数据到结束记录的时间段注3:观测时段≥1.6,指采用网观测模式时,每站至少观测一时段,其中二次设站点数应不少于GPS网总点数的60%注4:采用基于卫星定位连续运行基准站点观测模式时,可连续观测,但观测时间应不低于表中规定的各时段观测时间的和数据处理(1)外业数据检核1)B级GPS网基线外业预处理和C、D、E级GPS网基线处理,复测基线的长度较差ds应满足公式1.1的规定:ds≦2σ (1.1)σ---为基线测量中误差,单位为毫米2)B、C、D、E级GPS网基线测量中误差σ采用外业测量时使用的GPS接收机的标称精度,计算时变长按实际平均边长计算。
3)B、C、D、E级GPS网同步环闭合差,不宜超过以下规定:三边同步环中只有两个同步边成果可以视为独立的成果,第三边成果应为其余两边的代数和。
由于模型误差和处理软件的内在缺陷,第三边处理结果与前两边的代数和常不为零,其差值应符合公式1.2≦≦≦(1.2)式中:σ----基线测量中误差,单位为毫米,计算按12.2.5规定执行。
结构设计规范序号当前版次修改内容摘要修改人修改日期目录1 目的和范围 (2)2 规范性引用文件 (2)3 术语和定义 (3)3.1 工业设计 (3)3.2 结构设计 (3)3.3 标准件 (3)3.4 钣金件 (3)3.5 机加工件 (3)3.6 塑胶件 (3)4 约定 (3)5 通用要求 (4)5.1 软件要求 (4)5.2 设计准则 (4)5.3 材料选择 (5)5.4 公差要求 (5)6 标准件设计要求 (6)7 钣金件设计要求 (6)8 焊接设计要求 (9)9 机加工件设计要求 (11)10 塑胶件设计要求 (12)11 接插件设计要求 (16)12 表面处理 (16)13 铭牌设计要求 (17)14 包装设计要求 (18)15 绘图要求 (18)本规范用于指导结构工程师根据产品的功能、环境条件和载荷条件以及用户的特殊要求进行结构设计,确保机械产品结构设计的合理性、功能的完善性、设计标准的统一性。
本规范适应于轨道交通车辆上安装的所有电子设备的机械产品结构设计,非车载产品可参考执行本规范。
下列文件对于本规范的应用是必不可少的。
凡是注日期的引用文件,仅注日期的版本合用于本规范。
凡是未注日期的引用文件,其最新版本(包括所有的修改单)合用于本规范。
GB/T 1184-1996 GB/T 1800.2-2022 形状和位置公差未注公差值产品几何技术规范(GPS) 极限与配合第2 部份:标准公差等级和孔、轴极限偏差表GB/T 1804-2000 未注公差的线性和角度尺寸的公差GB 4208-2022 外壳防护等级(IP 代码)GB/T 5231-2022 加工铜及铜合金牌号和化学成份GB/T 6414-1999 铸件尺寸公差与机械加工余量GB/T 13306-2022 标牌GB/T 13914-2022 冲压件尺寸公差GB/T 13915-2022 冲压件角度公差GB/T 13916-2022 冲压件形状与位置未注公差GB/T 14486-2022 塑料模塑件尺寸公差GB/T 14665-2022 机械工程CAD 制图规则GB/T 19520.17-2022 电子设备机械结构482.6mm(19 in)系列机械结构尺寸第3-105 部份:1U 高度机箱尺寸和设计要求GB/T 25119-2022 GB 50429 轨道交通机车车辆电子装置铝合金结构设计规范下列术语和定义合用于本规范。
GB/T 19392-2003 汽车GPS导航系统通用规范本标准附录A为规范性附录,附录B为资料性附录;由信息产业部提出;由中国电子技术标准化研究所总归口;由全国导航设备标准化技术委员会归口;起草单位:信息产业部电子第二十研究所、西安东强电子导航公司;起草人:王信群、吴林、吴菊萍、高峰、王炜、王达民。
范围本标准规定了汽车GPS导航系统(以下简称系统)的要求、试验方法、检验规则、标志、包装、运输及贮存。
本标准适用于汽车用GPS导航系统的研制和生产,也是制定产品标准和检验产品质量的依据。
以无线通信数据传输和GPS相结合,并具备路线导航功能的其他汽车电子产品,可参照采用。
2规范性引用文件下列文件中的条款通过本标准引用而成为本标准的条款。
凡是注明日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版本适用于本标准。
GB/T191包装储运图示标志GB/T2828.1-2003计数抽样检验程序第1部分:按接收质量限(AQL)检索的逐批检验抽样计划GB/T2829-2002周期检验计数抽样程序及表(适用于过程稳定性的检验)GB/丁4857.5包装运输包装件跌落试验方法GB/T5080.1-1986设备可靠性试验总要求GB/T5080.7-1986设备可靠性试验恒定失效率假设下的失效率与平均无故障时间的验证试验方案GB5296.1-1997消费品使用说明总则GB/T6388运翰包装收发货标志GB/T8566信息技术软件生存周期过程GB/T8567计算机软件产品开发文件编制指南GB9254-1998信息技术设备的无线电骚扰限值和测量方法GB/T12504计算机软件质量保证计划规范GB/T13384-1992机电产品包装通用技术条件GB15540-1995陆地移动通信设备电磁兼容技术要求和测量方法GB15842-1995移动通信设备安全要求和试验方法SJ/Z3216电子产品防护、包装和装箱等级SJ/T10325-1992汽车收放机环境试验要求和试验方法术语和定义下列术语和定义适用于本标准。
1 分类方法一:A、B、C、D、E级1.1参考规范《全球定位系统GPS测量规范-2009》1.2 界面显示参数1.3 划分标准B、C、D和E级的精度应不低于表1的要求:表1.2布设原则:表1.3各级GPS网点位应均匀分布,相邻点间距离最大不宜超过网平均间距的2倍。
接收机的选用:表1.4观测:表1.5数据处理(1)外业数据检核1)B级GPS网基线外业预处理和C、D、E级GPS网基线处理,复测基线的长度较差ds应满足公式1.1的规定:ds≦2σ (1.1)σ---为基线测量中误差,单位为毫米2)B、C、D、E级GPS网基线测量中误差σ采用外业测量时使用的GPS接收机的标称精度,计算时变长按实际平均边长计算。
3)B、C、D、E级GPS网同步环闭合差,不宜超过以下规定:三边同步环中只有两个同步边成果可以视为独立的成果,第三边成果应为其余两边的代数和。
由于模型误差和处理软件的内在缺陷,第三边处理结果与前两边的代数和常不为零,其差值应符合公式1.2≦≦≦(1.2)式中:σ----基线测量中误差,单位为毫米,计算按12.2.5规定执行。
对于四站以上同步观测时段,在处理完个边观测值后,应检查一切可能的三边环闭合差。
4) B、C、D、E级GPS网外业基线的处理结果,其独立闭合环或附和路线坐标闭合差W S和各坐标分量闭合差应满足公式(1.3)的规定。
≦3σ≦3σ≦3σ≦3σ(1.3)W S=n为闭合环数。
(2)基线向量解算基本要求(略参考规范12.3.3节)2 分类方法二:城市二、三、四等和一、二级城市或工程GPS按相邻点的平均距离和精度划分为二、三、四等和一、二级。
2.1参考规范《全球定位系统城市测量技术规范-1997》2.2 界面显示参数2.3 划分标准1)各等级GPS网相邻点间弦长精度应按公式2.1计算σ=(2.1)式中σ----标准差(基线向量的弦长中误差mm);a-----固定误差(mm);b-----比例误差系数(1X10-6);d-----相邻点间的距离(km)。
几何技术规范(GPS)GB/T 1804-1996和GB/T 1804-2000一般公差李明教授GPSGeometrical Product Specification and VerificationGD&T2013.10上海大学李明(robotlib@)使用一般公差的好处简化制图图面清晰易读可高效地进行信息交换节省图样设计时间。
设计人员不必逐一考虑或计算公差值,只需了解某要素在功能上是否允许采用大于或等于一般公差的公差值图样明确了哪些要素可由一般工艺水平保证,可简化检验要求,有助于质量管理突出了图样上注出公差的尺寸这些尺寸大多是重要的且需要控制的引起加工与检验时重视和作出计划安排由于签订合同前就已经知道工厂通常车间精度买方和供方间能更方便地进行订货谈判同时图样表示完整也可避免交货时买方和供方间的争论 由于签订合同前就已经知道工厂通常车间精度买方和供方间能更方便地进行订货谈判同时图样表示完整也可避免交货时买方和供方间的争论只有特定车间的通常车间精度可靠地满足等于或小于所采用的一般公差条件时,才能完全体现上述这些好处。
因此车间应做到•测量评估车间的通常车间精度•只接受一般公差等于或大于通常车间精度的图样上海大学李明(robotlib@) 2上海大学 李明 (robotlib@) 3GB/T 1804-2000( eqv ISO 2768-1:1989)一般公差未注公差的线性和角度尺寸的公差GB/T 1184-1996( eqv ISO 2768-2:1989)一般公差形状和位置公差 未注公差一般公差(未注公差的公差) 上海大学 李明 (robotlib@) 4GB/T 1804-2000( eqv ISO 2768-1:1989) 规定了未标出公差的线性和角度尺寸的一般公差的公差等级和极限偏差数值适用于金属切削加工的尺寸,也适用于一般的冲压加工的尺寸。
非金属材料和其他工艺方法加工的尺寸可参照采用适用于下列未注公差的尺寸: a) 线性尺寸(如外尺寸,内尺寸,阶梯尺寸,直径,半径,距离,倒圆半径和倒角高度等) b) 角度尺寸,包括通常不注出角度值的尺寸,例如直角(90°)。
结构设计规范编制:日期:审核:日期:批准:日期:修改记录页目录1目的和范围 (2)2规范性引用文件 (2)3术语和定义 (3)3.1 工业设计 (3)3.2 结构设计 (3)3.3 标准件 (3)3.4 钣金件 (3)3.5 机加工件 (3)3.6 塑胶件 (3)4约定 (3)5通用要求 (4)5.1 软件要求 (4)5.2 设计准则 (4)5.3 材料选择 (5)5.4公差要求 (5)6标准件设计要求 (6)7钣金件设计要求 (6)8焊接设计要求 (9)9机加工件设计要求 (11)10塑胶件设计要求 (12)11接插件设计要求 (16)12表面处理 (16)13铭牌设计要求 (17)14包装设计要求 (18)15绘图要求 (18)1目的和范围本规范用于指导结构工程师根据产品的功能、环境条件和载荷条件以及用户的特殊要求进行结构设计,确保机械产品结构设计的合理性、功能的完善性、设计标准的统一性。
本规范适应于轨道交通车辆上安装的所有电子设备的机械产品结构设计,非车载产品可参考执行本规范。
2规范性引用文件下列文件对于本规范的应用是必不可少的。
凡是注日期的引用文件,仅注日期的版本适用于本规范。
凡是未注日期的引用文件,其最新版本(包括所有的修改单)适用于本规范。
GB/T 1184-1996 形状和位置公差未注公差值GB/T 1800.2-2009 产品几何技术规范(GPS)极限与配合第2部分:标准公差等级和孔、轴极限偏差表GB/T 1804-2000 未注公差的线性和角度尺寸的公差GB 4208-2008 外壳防护等级(IP代码)GB/T 5231-2012 加工铜及铜合金牌号和化学成分GB/T 6414-1999 铸件尺寸公差与机械加工余量GB/T 13306-2011 标牌GB/T 13914-2013 冲压件尺寸公差GB/T 13915-2013 冲压件角度公差GB/T 13916-2013 冲压件形状与位置未注公差GB/T 14486-2008 塑料模塑件尺寸公差GB/T 14665-2012 机械工程CAD制图规则GB/T 19520.17-2010 电子设备机械结构482.6mm(19 in)系列机械结构尺寸第3-105部分:1U高度机箱尺寸和设计要求GB/T 25119-2010 轨道交通机车车辆电子装置GB 50429 铝合金结构设计规范3术语和定义下列术语和定义适用于本规范。
GPS设计要求§10.3 GPS控制网的设计10.3.1总述一个完整的技术设计,主要应包含如下内容:1.项目来源介绍项目的来源、性质。
即项目由何单位、部门下达、发包,属于何种性质的项目等。
2.测区概况介绍测区的地理位置、气候、人文、经济发展状况、交通条件、通讯条件等。
这可为今后工程施测工作的开展提供必要的信息。
如在施测时作业时间、交通工具的安排,电力设备使用,通讯设备的使用等。
3.工程概况介绍工程的目的、作用、要求、GPS网等级(精度)、完成时间、有无特殊要求等在进行技术设计、实际作业和数据处理中所必须要了解的信息。
4.技术依据介绍工程所依据的测量规范、工程规范、行业标准及相关的技术要求等。
5.现有测绘成果介绍测区内及与测区相关地区的现有测绘成果的情况。
如已知点、测区地形图等。
6.施测方案介绍测量采用的仪器设备的种类、采取的布网方法等。
7.作业要求规定选点埋石要求、外业观测时的具体操作规程、技术要求等,包括仪器参数的设置(如采样率、截止高度角等)、对中精度、整平精度、天线高的量测方法及精度要求等。
8.观测质量控制介绍外业观测的质量要求,包括质量控制方法及各项限差要求等。
如数据删除率、RMS值、RATIO值、同步环闭合差、异步环闭合差、相邻点相对中误差、点位中误差等。
9.数据处理方案详细的数据处理方案,包括基线解算和网平差处理所采用的软件和处理方法等内容。
对于基线解算的数据处理方案,应包含如下内容:基线解算软件、参与解算的观测值、解算时所使用的卫星星历类型等。
对于网平差的数据处理方案,应包含如下内容:网平差处理软件、网平差类型、网平差时的坐标系、基准及投影、起算数据的选取等。
10.提交成果要求规定提交成果的类型及形式;若国家技术质量监督总局或行业发布新的技术设计规定,应据之编写。
10.3.2 GPS基线向量网的等级根据我国1992年所颁布的全球定位系统测量规范,GPS基线向量网被分成了A、B、C、D、E五个级别。