第4讲 控制系统的方块图及其基本组成
- 格式:ppt
- 大小:505.50 KB
- 文档页数:22
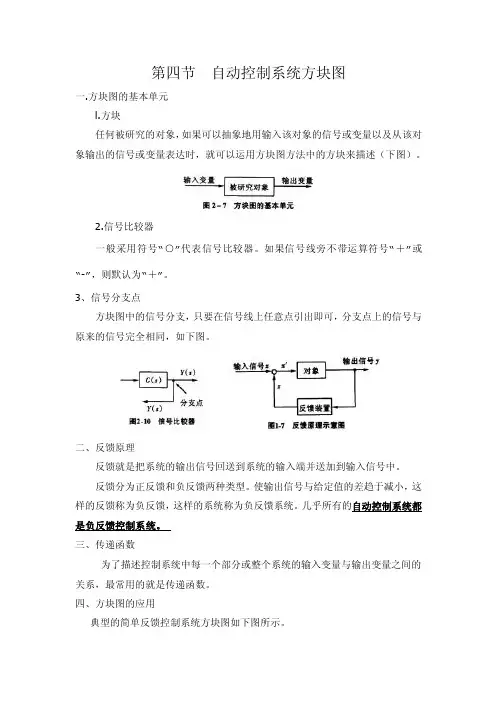
第四节自动控制系统方块图一.方块图的基本单元l.方块任何被研究的对象,如果可以抽象地用输入该对象的信号或变量以及从该对象输出的信号或变量表达时,就可以运用方块图方法中的方块来描述(下图)。
2.信号比较器一般采用符号“○”代表信号比较器。
如果信号线旁不带运算符号“+”或“-”,则默认为“+”。
3、信号分支点方块图中的信号分支,只要在信号线上任意点引出即可,分支点上的信号与原来的信号完全相同,如下图。
二、反馈原理反馈就是把系统的输出信号回送到系统的输入端并送加到输入信号中。
反馈分为正反馈和负反馈两种类型。
使输出信号与给定值的差趋于减小,这样的反馈称为负反馈,这样的系统称为负反馈系统。
几乎所有的自动控制系统都是负反馈控制系统。
三、传递函数为了描述控制系统中每一个部分或整个系统的输入变量与输出变量之间的关系,最常用的就是传递函数。
四、方块图的应用典型的简单反馈控制系统方块图如下图所示。
第五节控制系统分类一、各种分类的方法(l)如果按被控变量可划分为:温度、压力、液位、流量和成分等控制系统。
这是一种常见的分类。
(2)如果按被控系统中控制仪表及装置所用的动力和传递信号的介质可划分为:气动、电动、液动、机械式等控制系统。
(3)如果按被控制对象可划分为:流体输送设备、传热设备、精馏塔和化学反应器控制系统等。
(4)按调节器的控制规律可划分为:比例控制、积分控制、微分控制、比例积分控制、比例微分控制、比例积分微分控制等。
(5)按系统功能与结构可划分为:单回路简单控制系统;串级、比值、选择性、分程、前馈和均匀等常规复杂控制系统。
(6)按给定值的变化情况可划分为:定值控制系统、随动控制系统和程序控制系统。
第六节自动控制系统的过渡过程及品质指标一、瞬态响应分析方法瞬态响应分析方法的基本做法是:给系统输入各种不同的典型信号,观察并分析系统的响应曲线。
1、静态与动态静态是指该变量不随时间而变化的某个平衡状态;动态是指该变量随时间而变化的不平衡状态。
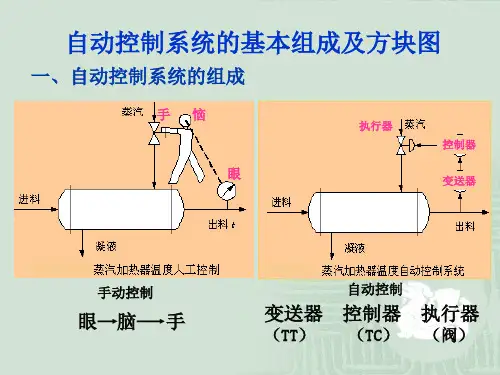
2 控制系统的组成及框图以上所列举的控制系统都属于简单控制系统,与其他任何的控制系统相同,这些控制系统均由下列基本单元组成。
○1被控对象(也称被控过程)是指被控制的生产设备或装置。
针对以上三例,分别是液罐、蒸汽加热器、气罐系统。
○2测量变送器用于测量被控变量,并按一定的规律将其转换为标准信号输出。
依据电器标准的不同,常用的标准信号包括:0—10mA DC信号(DDZ 二型仪表)、4—20mA DC信号(DDZ 三型仪表)、0.02—0.10MPa气动信号等。
○3执行器常用的是控制阀。
它接受来自控制器的命令信号u,用于自动改变控制阀的开度。
如例1中,控制器通过改变出水阀门的开度以调节水量Q。
,最终达到克服外部扰动对被控变量h的影响。
○4控制器(也称调节器)它将被控变量的测量值与设定值进行比较,得出偏差信号e(t),并按一定的规律给出控制信号u(t),对于工业中常用的各类控制器,其输入输出信号大都为标准的电流信号,如DDZ三型仪表的4—20mA DC信号。
通常,用文字叙述的方法来描述控制系统的组成和工作原理较为复杂,而在过程控制实践中常常采用直观的方框图来表示。
如图1.1.5为液体储罐液位控制对应的方框图,一般的单回路控制系统的方框图可用如图1.1.6所示的方框图来表示方框图中每一条线代表系统中的一个信号,线上的箭头表示信号传递的方向;每个方块代表系统中的一个环节,它表示了其输入对其输出的影响。
方框图可以把一个控制系统变量间的关系完整的表达出来。
3 过程控制的术语○1被控变量(Controlled Variable,CV)也称受控变量或过程变量(Process Variable,PV)。
他是指被控对象需要维持在其理想值的工艺变量,如上述各例中的夜罐液位、换热器工艺介质出口温度、罐内压力。
在过程控制中常用的被控变量包括:温度、压力/差压、液位/料位、流量、成分含量等实际物理量。
有时,也可以用过程变量的检测电信号来表示被控变量,该测量信号称为过程变量的测量值(Measurement)。
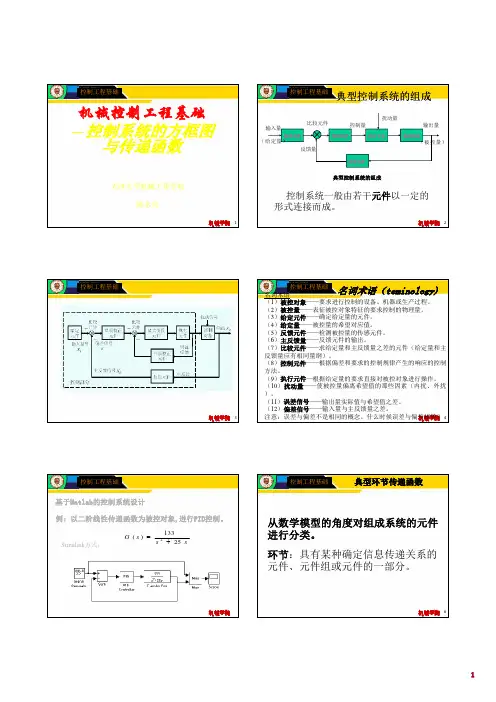
机械学院控制工程基础1天津大学机械工程学院陈永亮机械控制工程基础—控制系统的方框图与传递函数机械学院控制工程基础2典型控制系统的组成给定元件控制元件执行元件被控对象反馈元件典型控制系统的组成输入量(给定量)比较元件反馈量控制量扰动量输出量(被控量)控制系统一般由若干元件以一定的形式连接而成。
机械学院控制工程基础3机械学院控制工程基础4名词术语(名词术语(teminology)teminology)名词术语(1)被控对象——要求进行控制的设备、机器或生产过程。
(2)被控量——表征被控对象特征的要求控制的物理量。
(3)给定元件——确定给定量的元件。
(4)给定量——被控量的希望对应值。
(5)反馈元件——检测被控量的传感元件。
(6)主反馈量——反馈元件的输出。
(7)比较元件——求给定量和主反馈量之差的元件(给定量和主反馈量应有相同量纲)。
(8)控制元件——根据偏差和要求的控制规律产生的响应的控制方法。
(9)执行元件—根据给定量的要求直接对被控对象进行操作。
(10)扰动量——使被控量偏离希望值的那些因素(内扰、外扰)。
(11)误差信号——输出量实际值与希望值之差。
(12)偏差信号——输入量与主反馈量之差。
注意:误差与偏差不是相同的概念。
什么时候误差与偏差相等?机械学院控制工程基础基于Matlab的控制系统设计例:以二阶线性传递函数为被控对象,进行PID控制。
ss s G 25133)(2+=Simulink 方式:机械学院控制工程基础6典型环节传递函数从数学模型的角度对组成系统的元件进行分类。
环节:具有某种确定信息传递关系的元件、元件组或元件的一部分。
机械学院控制工程基础7典型环节传递函数传递函数的零极点表示∏∏==*--=----=ni imi j n n m m s s z s K s s s s a z s z s b s G 1111)()()()()()()( z 是0)(=s G 的根,称之为)(s G 的零点。
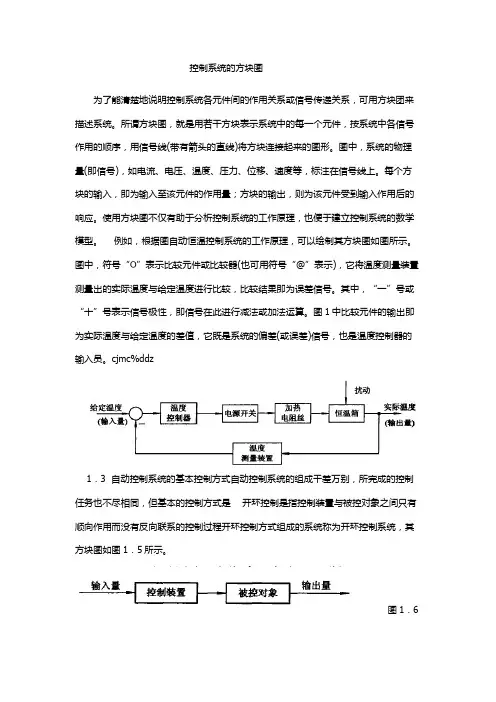
控制系统的方块图为了能清楚地说明控制系统各元件间的作用关系或信号传递关系,可用方块团来描述系统。
所谓方块图,就是用若干方块表示系统中的每一个元件,按系统中各信号作用的顺序,用信号线(带有箭头的直线)将方块连接起来的图形。
图中,系统的物理量(即信号),如电流、电压、温度、压力、位移、速度等,标注在信号线上。
每个方块的输入,即为输入至该元件的作用量;方块的输出,则为该元件受到输入作用后的响应。
使用方块图不仅有助于分析控制系统的工作原理,也便于建立控制系统的数学模型。
例如,根据图自动恒温控制系统的工作原理,可以绘制其方块图如图所示。
图中,符号“O”表示比较元件或比较器(也可用符号“@”表示),它将温度测量装置测量出的实际温度与给定温度进行比较,比较结果即为误差信号。
其中,“一”号或“十”号表示信号极性,即信号在此进行减法或加法运算。
图1中比较元件的输出即为实际温度与给定温度的差值,它既是系统的偏差(或误差)信号,也是温度控制器的输入员。
cjmc%ddz1.3 自动控制系统的基本控制方式自动控制系统的组成千差万别,所完成的控制任务也不尽相同,但基本的控制方式是开环控制是指控制装置与被控对象之间只有顺向作用而没有反向联系的控制过程开环控制方式组成的系统称为开环控制系统,其方块图如图1.5所示。
图1.6所示为直流电动机开环调速系统原理团。
电位器输出电压Mr经触发装置和晶间管整流器构成的晶闸管整流装置转换并放大为宽度可调的直流电压M2,作为直流电动机的电相电压,电动机带动负载以转速M旋转。
改变yr,即改变x8,从而改变了转速n。
图1.6中,输入量为给定电压ol,被控对象为负载,输出量为直流电动机转速n。
显见,电动机转速M由电位器控制,不同的电位器位置即给定电压9f,就有相应的电动机转速M与之对应*而转速n对电位器的控制作用(给定电压yr)没有影响。
但是,当晶闸管整流装置的特性发生变化或负载力矩发生变化时(相当于系统受到扰动),即使电位器位置不变,即电压Mf不变,电动机的转速M也将变化。
机械学院控制工程基础1天津大学机械工程学院陈永亮机械控制工程基础—控制系统的方框图与传递函数机械学院控制工程基础2典型控制系统的组成给定元件控制元件执行元件被控对象反馈元件典型控制系统的组成输入量(给定量)比较元件反馈量控制量扰动量输出量(被控量)控制系统一般由若干元件以一定的形式连接而成。
机械学院控制工程基础3机械学院控制工程基础4名词术语(名词术语(teminology)teminology)名词术语(1)被控对象——要求进行控制的设备、机器或生产过程。
(2)被控量——表征被控对象特征的要求控制的物理量。
(3)给定元件——确定给定量的元件。
(4)给定量——被控量的希望对应值。
(5)反馈元件——检测被控量的传感元件。
(6)主反馈量——反馈元件的输出。
(7)比较元件——求给定量和主反馈量之差的元件(给定量和主反馈量应有相同量纲)。
(8)控制元件——根据偏差和要求的控制规律产生的响应的控制方法。
(9)执行元件—根据给定量的要求直接对被控对象进行操作。
(10)扰动量——使被控量偏离希望值的那些因素(内扰、外扰)。
(11)误差信号——输出量实际值与希望值之差。
(12)偏差信号——输入量与主反馈量之差。
注意:误差与偏差不是相同的概念。
什么时候误差与偏差相等?机械学院控制工程基础基于Matlab的控制系统设计例:以二阶线性传递函数为被控对象,进行PID控制。
ss s G 25133)(2+=Simulink 方式:机械学院控制工程基础6典型环节传递函数从数学模型的角度对组成系统的元件进行分类。
环节:具有某种确定信息传递关系的元件、元件组或元件的一部分。
机械学院控制工程基础7典型环节传递函数传递函数的零极点表示∏∏==*--=----=ni imi j n n m m s s z s K s s s s a z s z s b s G 1111)()()()()()()( z 是0)(=s G 的根,称之为)(s G 的零点。