高精度组合导航系统仿真
- 格式:pdf
- 大小:227.21 KB
- 文档页数:4

GPSSINS超紧耦合组合导航系统的信息融合算法研究中期报告GPSSINS是一种超紧耦合组合导航系统,结合全球定位系统(GPS)和惯性导航系统(INS)的特点,可以提高导航系统的精度和可靠性。
在GPSSINS中,GPS提供位置和速度信息,INS提供姿态和加速度信息。
信息融合算法是将这两个系统融合在一起,得到更准确的导航结果的关键。
本次中期报告主要介绍了GPSSINS超紧耦合组合导航系统信息融合算法的研究情况,包括以下几个方面:1. GPS信号弱化对导航精度的影响GPS信号受到天气、地形和建筑物等因素的影响,会发生信号衰减和多径效应,导致定位精度下降。
针对这一问题,我们采用了多路径补偿和信号干扰削弱技术,优化GPS信号的接收和处理方式,从而提高导航精度。
2. INS误差累积对导航精度的影响INS存在着漂移和零偏等误差,这些误差会随着时间的推移累积,导致导航精度下降。
为了解决这一问题,我们研究了基于卡尔曼滤波的误差补偿方法,实现对INS误差的实时补偿,从而提高导航精度。
3. 数据融合算法的优化在GPSSINS中,GPS和INS的数据需要进行融合才能得到准确的导航结果。
我们研究了多种数据融合算法,包括基于权值的融合算法和基于粒子滤波的融合算法等,通过对比实验确定了最优算法。
4. 系统仿真与实验验证为了验证GPSSINS超紧耦合组合导航系统信息融合算法的有效性,我们进行了系统仿真和实验验证。
仿真结果表明,我们提出的算法可以有效地提高导航精度;实验结果也验证了这一结论。
总之,本次中期报告介绍了GPSSINS超紧耦合组合导航系统信息融合算法的研究情况,通过对GPS信号弱化、INS误差累积和数据融合算法的优化,实现了对导航精度的有效提高。
后续工作将进一步优化算法,提高系统的可靠性和实用性。
复杂环境下罗兰C∕北斗组合导航系统GDOP仿真分析随着社会和经济的快速发展,导航系统已经成为人民生活中不可或缺的一部分,其中罗兰C/北斗组合导航系统是目前最为先进的一种。
然而,在复杂环境下,该系统的导航精度会受到一定的干扰,因此需要进行GDOP仿真分析来进行性能评估。
GDOP是指几何精度因子,是描述卫星导航系统精度的重要指标之一,它与观测卫星的位置关系密切。
当卫星的位置比较集中时,GDOP值较小,精度更高;反之,则GDOP值较大,精度更低。
首先,要进行环境建模,包括建立卫星轨道模型、场景模型和干扰模型等。
接下来,在环境建模的基础上,通过Matlab等计算软件进行GDOP仿真分析,得出罗兰C/北斗组合导航系统在不同场景下的GDOP值。
在仿真分析过程中,需要考虑以下影响因素:1.卫星位置分布:卫星分布越分散,GDOP值就越大,精度越低。
2.卫星高度:卫星高度越高,处于视线范围内的卫星数量就越多,GDOP值就越小,精度越高。
3.地形:地形起伏会影响观测到的卫星数量和质量,GDOP值也会受到影响。
4.建筑物:建筑物会在信号传输过程中产生信号阻断和反射,导致信号质量下降,GDOP值也会受到影响。
5.天气条件:天气恶劣时,信噪比下降,导航精度也会受到影响。
通过仿真实验,可以得出在不同环境条件下的GDOP值,进而进行性能优化。
例如,在地形复杂的城市中,可以通过调整卫星高度或增加卫星数量来改善精度。
在天气条件恶劣的情况下,可以选择更加敏感的接收器以提高信号收取效率。
在实际应用中,GDOP仿真分析可以为罗兰C/北斗组合导航系统的精度优化提供重要的参考,同时也可以为其他卫星导航系统的性能评估提供指导。
随着技术的不断发展,未来导航系统将进一步提高精度和可靠性,为人们的生活和工作带来更多的便利。
由于题目未指定所需数据的类型及来源,因此本文将以以下数据为例进行分析:数据来源:某电商平台数据时间范围:2020年1月1日至2021年12月31日数据类型:销售数据样本量:100001. 销售额与销量分析根据数据统计,2020年1月1日至2021年12月31日,共有10000个样本,该期间销售额总计为2000万元,销量总计为50000件。
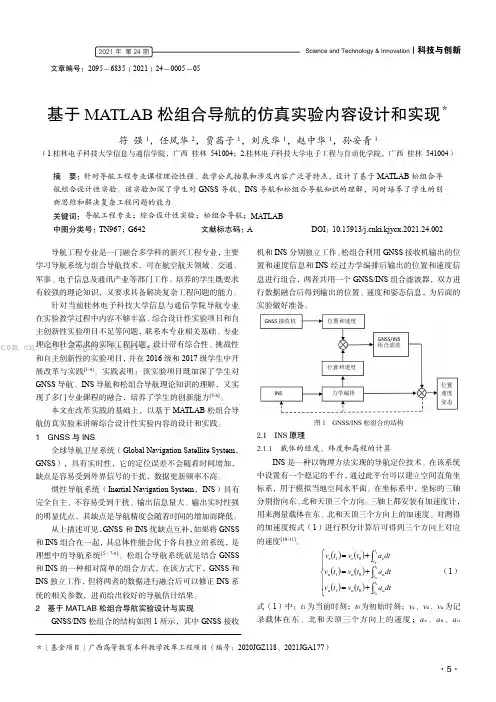
·5·文章编号:2095-6835(2021)24-0005-05基于MATLAB 松组合导航的仿真实验内容设计和实现*符强1,任风华2,贾茜子1,刘庆华1,赵中华1,孙安青1(1.桂林电子科技大学信息与通信学院,广西桂林541004;2.桂林电子科技大学电子工程与自动化学院,广西桂林541004)摘要:针对导航工程专业课程理论性强、数学公式抽象和涉及内容广泛等特点,设计了基于MATLAB 松组合导航综合设计性实验。
该实验加深了学生对GNSS 导航、INS 导航和松组合导航知识的理解,同时培养了学生的创新思维和解决复杂工程问题的能力。
关键词:导航工程专业;综合设计性实验;松组合导航;MATLAB 中图分类号:TN967;G642文献标志码:ADOI :10.15913/ki.kjycx.2021.24.002导航工程专业是一门融合多学科的新兴工程专业,主要学习导航系统与组合导航技术,可在航空航天领域、交通、军事、电子信息及通讯产业等部门工作。
培养的学生既要求有较强的理论知识,又要求具备解决复杂工程问题的能力。
针对当前桂林电子科技大学信息与通信学院导航专业在实验教学过程中内容不够丰富、综合设计性实验项目和自主创新性实验项目不足等问题,联系本专业相关基础、专业理论和社会需求的实际工程问题,设计带有综合性、挑战性和自主创新性的实验项目,并在2016级和2017级学生中开展改革与实践[1-4]。
实践表明:该实验项目既加深了学生对GNSS 导航、INS 导航和松组合导航理论知识的理解,又实现了多门专业课程的融合,培养了学生的创新能力[5-6]。
本文在改革实践的基础上,以基于MATLAB 松组合导航仿真实验来讲解综合设计性实验内容的设计和实践。
1GNSS 与INS全球导航卫星系统(Global Navigation Satellite System ,GNSS ),具有实时性,它的定位误差不会随着时间增加,缺点是容易受到外界信号的干扰,数据更新频率不高。
EKF、UKF、PF组合导航算法仿真对比分析摘要随着人类对海洋探索的逐步深入,自主式水下机器人已被广泛地应用于海底搜救、石油开采、军事研究等领域。
良好的导航性能可以为航行过程提供准确的定位、速度和姿态信息,有利于AUV精准作业和安全回收。
本文介绍了三种不同的导航算法的基本原理,并对算法性能进行了仿真实验分析。
结果表明,在系统模型和时间步长相同的情况下,粒子滤波算法性能优于无迹卡尔曼滤波算法,无迹卡尔曼滤波算法性能优于扩展卡尔曼滤波算法。
关键词自主式水下机器人导航粒子滤波无迹卡尔曼滤波扩展卡尔曼滤波海洋蕴藏着丰富的矿产资源、生物资源和其他能源,但海洋能见度低、环境复杂、未知度高,使人类探索海洋充满了挑战。
自主式水下机器人(Autonomous Underwater Vehicle,AUV)可以代替人类进行海底勘探、取样等任务[1],是人类探索和开发海洋的重要工具,已被广泛地应用于海底搜救、石油开采、军事研究等领域。
为了使其具有较好的导航性能,准确到达目的地,通常采用组合导航算法为其导航定位。
常用的几种组合导航算法有扩展卡尔曼滤波算法(Extended Kalman Filter,EKF)、无迹卡尔曼滤波算法(Unscented Kalman Filter,UKF)和粒子滤波算法(Particle Filter,PF)。
1扩展卡尔曼滤波算法EKF滤波算法通过泰勒公式对非线性系统的测量方程和状态方程进行一阶线性化截断,主要包括预测阶段和更新阶段。
预测阶段是利用上一时刻的状态变量和协方差矩阵来预测当前时刻的状态变量和协方差矩阵;更新阶段是通过计算卡尔曼增益,并结合预测阶段更新的状态变量和当前时刻的测量值,进而更新状态变量和协方差矩阵[2]。
虽然EKF滤波算法在非线性状态估计系统中广泛应用,但也凸显出两个问题:一是由于泰勒展开式抛弃了高阶项导致截断误差产生,所以当系统处于强非线性、非高斯环境时,EKF算法可能会使滤波发散;二是由于EKF算法在线性化处理时需要用雅克比(Jacobian)矩阵,其繁琐的计算过程导致该方法实现相对困难。
惯性导航与卫星导航组合定位精度分析及仿真周俊;王琳;徐永强;黄海;李枭楠【摘要】随着导航领域的逐渐发展,卫星导航的应用成为重要课题.阐述了惯性导航、卫星导航及其组合导航系统的基本原理和优缺点,对惯性导航系统的定位精度进行分析及仿真验证,并给出分析和验证的过程及结果.对惯性导航与卫星导航松组合模式的定位精度进行了分析和测试,并给出所使用的Kalman滤波器的详细参数及测试结果.测试结果表明,组合后的定位精度比单INS定位精度有大幅提高,且误差不随时间发散.【期刊名称】《无线电工程》【年(卷),期】2018(048)012【总页数】5页(P1086-1090)【关键词】卫星导航;惯性导航;组合导航;Kalman滤波【作者】周俊;王琳;徐永强;黄海;李枭楠【作者单位】陆军航空兵学院陆军航空兵研究所, 北京 101121;陆军航空兵学院陆军航空兵研究所, 北京 101121;陆军航空兵学院陆军航空兵研究所, 北京101121;陆军航空兵学院陆军航空兵研究所, 北京 101121;中国电子科技集团公司第五十四研究所, 河北石家庄 050081【正文语种】中文【中图分类】TP30 引言惯性导航系统(INS)是依据牛顿惯性原理,利用陀螺、加速度计等惯性敏感元件及初始信息来计算载体的姿态、速度和位置[1-2]。
惯性导航完全依靠载体自身设备独立自主地进行导航,是一种保密性好且不易受干扰的导航系统[3-4]。
但由于惯性器件存在测量误差,这种误差进入导航解算时会随时间累积,导致导航结果的误差随时间发散[5]。
全球卫星导航系统(GNSS)是一种星基无线电导航系统,能为全球陆、海、空、天的各类军民载体提供全天候、全天时和高精度的三维位置、速度和精密时间信息[6-8]。
但由于用户接收机在接收其导航定位信号时容易受到遮挡、折射和高动态等因素的干扰,导致信号质量不稳定,进而影响定位精度,甚至失锁[9-10]。
而INS与GNSS的组合能够有效地解决惯导误差随时间发散的问题,同时可以增强GNSS接收机对信号的捕获与跟踪性能,提高导航系统的稳定性[11-13]。
第36卷第5期计算机仿真2019年5月文章编号:1006-9348(2019)05-0078-05卫星组合导航系统故障准确检测仿真杨楚雄,严甲汉,郭承军(电子科技大学电子科学技术研究院,四川成都611731)摘要:准确的传感器信号能够真实反映卫星组合导航系统的系统状态,但当传感器发生故障时,组合导航系统可能会发生性 能降级甚至失效的情况。
对传感器进行故障检测能够有效地保证卫星导航系统的安全性和可靠性。
传统的基于构建模型 的故障检测算法必然存在模型误差;基于神经网络的故障检测算法样本需求量大,易发散;标准的支持向量机故障检测算法 需要获取大量的故障数据,建模效率差。
针对以上问题提出了基于one-class SVM的故障检测算法,首先根据实测数据进行 相空间重构和支持向量预选取进行快速建模,然后利用该模型对测试数据进行故障检测。
仿真表明,上述算法能够迅速准 确的检测出容错组合导航子系统中的突变故障和缓变故障,检测率较高,检测延时较短,并且在小样本情况下,检测率明显 高于神经网络故障检测算法。
关键词:支持向量机;故障检测;检测率中图分类号:V249.3 文献标识码:BFault Detection of Fault-Tolerant Integrated NavigationBased on one-class SVMYANG Chu-xiong,YAN Jia-han,GUO Cheng-jun(Research Institute of Electronic Science and Technology,University of Electronic Science andTechnology of China,Chengdu Sichuan 611731, China)A B S T R A C T:In this paper,a fault detection algorithm based on one-class SVM was proposed.In this algorithm,thefast modeling of phase space reconstruction and support vector preselection based on the measured data were carried out/Then the model was used to detect the test data.Simulation test shows that the algorithm can quickly and accurately detect the abrupt and slow change faults in the fault-tolerant integrated navigation system.The detection rate is high and the detection delay is short.Besides,in the case of small sample,the detection rate is obviously higher than the neural network fault detection algorithm.K E Y W O R D S:SVM;Fault detection;Detection ratei引言随着科学技术的发展,目前已经有各种适用于载体航行 的导航系统,如卫星导航系统(GNSS)[I]、惯性导航系统(INS)121、地形参考系统(TRN)[3]、星光导航系统(CNS)[4]等,它们都有各自的优点和适用特性,但却都有固有的不足 之处。
第6章组合导航系统6.1引言从惯性导航的工作原理和误差分析可以看出,惯导系统的自主性很强,它可以连续地提供包括姿态基准在内的全部导航参数,并且具有非常好的短期精度和稳定性。
在航空、航天、航海和许多民用领域都得到了广泛的应用,成为目前各种航行体上应用的一种主要导航设备。
其主要缺点是导航定位误差随时间增长,导航误差积累的速度主要由初始对准的精度、导航系统使用的惯性传感器的误差以及主运载体运动轨迹的动态特性决定。
因而长时间独立工作后误差会增加[1]。
解决这一问题的途径有两个,一是提高惯导系统本身的精度。
主要依靠采用新材料、新工艺、新技术,提高惯性器件的精度,或研制新型高精度的惯性器件。
实践已经证明,这需要花费很大的人力和财力,且惯性器件精度的提高是有限的。
另一个途径是采用组合导航技术。
主要是使用惯性系统外部的某些附加导航信息源,用以改善惯性系统的精度,通过软件技术来提高导航精度。
在实际应用中有多种不同原理的其它导航系统,它们具有不同的特点:如多普勒导航系统,系统的误差和工作时间长短无关,但保密性不好;天文导航系统,位置精度高,但受观测星体可见度的影响;卫星导航的精度高,容易做到全球、全天候导航,但它需要一套复杂的定位设备,当载体做机动飞行时,导航性能下降,尤其重要的是,卫星导航在战时将受到导航星发射国家的制约。
于是,人们设想把具有不同特点的导航系统组合在一起,取长补短,用以提高导航系统的精度。
实践证明,这是一种很有效的方法。
现在可以利用的各种现代辅助导航手段结合估算处理技术和高速计算机的进展,使组合导航系统在近年来获得了广泛的应用。
组合导航技术是目前导航技术发展的重要方向。
6.2 组合导航系统的基本原理和方法6.2.1 组合导航系统基本原理在辅助的惯性导航系统中,一个或多个惯性导航系统的输出信号与独立测量的由外部源导出的相同的量进行比较。
然后根据这些测量值的差异导出对惯性导航系统的修正。
适当组合这些信息,就有可能获得比独立使用惯性系统更高的导航精度[2]。
复杂环境下罗兰C∕北斗组合导航方法及仿真分析罗兰C∕北斗组合导航方法及仿真分析随着现代化技术的不断发展,导航技术也日益成熟。
在复杂环境下进行导航,要求导航系统具有高精度、高鲁棒性以及高度可靠性等特点。
而罗兰C∕北斗组合导航方法作为一种新型导航技术,能够满足这些要求。
下面将介绍罗兰C∕北斗组合导航方法及其仿真分析。
一、罗兰C∕北斗组合导航方法罗兰C∕北斗组合导航方法是将两种不同的导航系统进行融合,达到提高导航精度及鲁棒性的效果。
罗兰C是一种基于惯性导航系统的高精度导航技术,基于姿态矩阵的扩展卡尔曼滤波算法是其主要算法;北斗卫星导航系统则是一种基于卫星信号的导航技术,可以在不通视的情况下进行有效导航。
两种导航系统的数据经过融合后,可以提高导航精度及鲁棒性。
罗兰C∕北斗组合导航系统的工作流程为:首先罗兰C系统利用惯性传感器来测量航向、俯仰和横滚角等惯性信息,进而利用卡尔曼滤波算法对这些数据进行处理和修正;在北斗卫星系统中,则利用卫星信号来反演出位置、速度和时刻等数据,在保证数据质量的情况下,对卫星信号进行处理和加工。
最后利用融合算法将这两部分数据进行融合处理,求得船只的位置、速度和姿态信息。
二、仿真分析为验证罗兰C∕北斗组合导航方法的优越性,下面进行仿真分析。
在仿真实验中,假设有多个接收器接受北斗卫星信号,其中一个接收器还搭载了罗兰C惯导系统。
设置复杂环境,如外部干扰、船体晃动等,并进行不同模式下的导航实验。
经过仿真实验,可以得到以下结论:1.与单纯北斗卫星导航系统相比,罗兰C∕北斗组合导航系统在复杂环境下导航精度更高,鲁棒性更强。
2.在使用罗兰C∕北斗组合导航系统时,即使单个接收器数据出现异常,也不会对导航精度产生过大的影响。
3.通过罗兰C∕北斗组合导航方法,可以解决北斗卫星导航系统在复杂地形或城市峡谷等垂直遮挡处信号弱或信号丢失等问题,大幅提高了导航的可靠性和稳定性。
总之,罗兰C∕北斗组合导航方法充分发挥了两种不同导航系统的优势,能够提高导航精度、鲁棒性和可靠性。