微机原理与接口技术-第4章指令系统9 44页
- 格式:ppt
- 大小:356.00 KB
- 文档页数:44
单片机微型计算机原理及接口技术课后习题答案第4章4-2 试述指令MOV A,R0和MOV A,@R0的区别两条指令的目的操作数相同,两条指令的区别在于源操作数来源不同:MOV A,R0 指令的源操作数就是R0寄存器的内容;而MOV A,@R0 指令的源操作数是位于存储器单元内,且存储器单元的地址是R0寄存器的内容。
4-3 试述指令MOV A,20H和MOV A,#20H的区别MOV A,20H 源操作数是直接寻址,20H表示源操作数所在存储器单元的地址。
MOV A,#20H 源操作数是立即数寻址,#20H是立即数,也就是源操作数。
4-4 说明一下指令中源操作数所在的存储器类型。
(1)MOV A,#30H; 立即数#30H,就是源操作数,存在于指令中,所以位于程序存储器。
(2)MOV A,30H; 30H是源操作数所在数据存储单元的地址,所以源操作数位于数据存储器。
(3)MOVC A,@A+DPTR;源操作数是变址寻址, 助记符MOVC表示源操作数位于程序存储器。
(4)MOVX A,@DPTR; 源操作数是寄存器间接寻址, 助记符MOVX表示源操作数位于外部数据存储器。
4-5 判断下列指令书写是否正确:(1)MOV A,B; ✔(2)MOV A,#3000H ; ✘,因为A是8位寄存器,而#3000H是16位数值,没法全部存到A里(3)INC,#20H ; ✘只能INC A/direct/Rn/@Ri/DPTR(4)MOV 5,A ; ✔,注意目的操作数是直接寻址方式,不是立即寻址(5)MOV 30H,40H; ✔(6)MOV B,@DPTR ; ✘,@DPTR寻址用于MOVX指令,不能用于MOV指R(7)CJNE 30H,#80H,NEXT ; ✘,CJNE指令格式只能是CJNE A/Rn/@Ri,#data,rel或CJNE A,direct,rel(8)POP A ; ✘只能是直接寻址方式POP direct,正确的是POP ACC(9)PUSH ACC; ✔(10)SJMP 2000H ; ✘rel的范围是-128~127(用补码表示其值)共256B范围4-6 设ACC=12H,B=64H,SP=60H,30H中存放的是78H,试分析下列程序执行后,ACC、B、30H、SP中的内容分别为多少,并画出堆栈示意图。
第1章微型计算机基础1.1 计算机中数的表示和运算1.1.1 计算机中的数制及转换在微型计算机中,常见和常使用的数制♦十进制♦二进制♦八进制♦十六进制等。
1.十进制十进制计数特征如下:♦使用10个不同的数码符号0,1,2,3,4,5,6,7,8,9♦基数为10♦每一个数码符号根据它在数中所处的位置(即数位),按逢十进一决定其实际数值。
任意一个十进制正数D,可以写成如下形式:(D)10=D n-l³10 n-1 +D n-2³10 n-2 +…+D l³101+D0³100+D—l³10 -1+D-2³10-2+²²+D-n³10-n2.二进制在二进制计数制中,基数是2,计数的原则是“逢2进1”。
特征如下:♦使用两个不同的数码符号0和l♦基数为2♦每一个数码符号根据它在数中所处的位置(即数位),按逢二进一决定其实际数值。
任意一个二进制正数B,可以写成如下形式:(B)2=B n—l³2 n-1 +B n—2³2 n-2+…+B l³21+B0³20+B—l³2 -1+B-2³1-2+²²+B-n³1-n十进制TO二进制把十进制整数转换成二进制整数通常采用的方法是“除以2取余数”。
把十进制小数转换成二进制小数所采用的规则是“乘2取整”。
在计算机中,数的存储、运算、传输都使用二进制。
[例 1-2] 将十进制小数0.6875转换成二进制小数3.八进制在八进制计数制中,基数是8,计数的原则是“逢8进1”。
特征如下:♦使用8个不同的数码符号0,1,2,3,4,5,6,7♦基数为8♦每一个数码符号根据它在数中所处的位置(即数位),按逢八进一来决定其实际数值。
任意一个八进制正数S,可表示为:(S)8=S n—l³8 n-1+S n—2³8 n-2+²²+S1³8 1+S0³8 0 +S—l³8–1+²²+S-m³8-m转换: 将十进制整数转换成八进制整数的方法是“除以8取余数”。
第1章绪论作业1. 将下列二进制数转换成十进制数。
(1)11001010B=202 (2)00111101B=61(3)01001101B=77 (4)10100100B=1643. 将下列十进制数分别转换为二进制数和十六进制数。
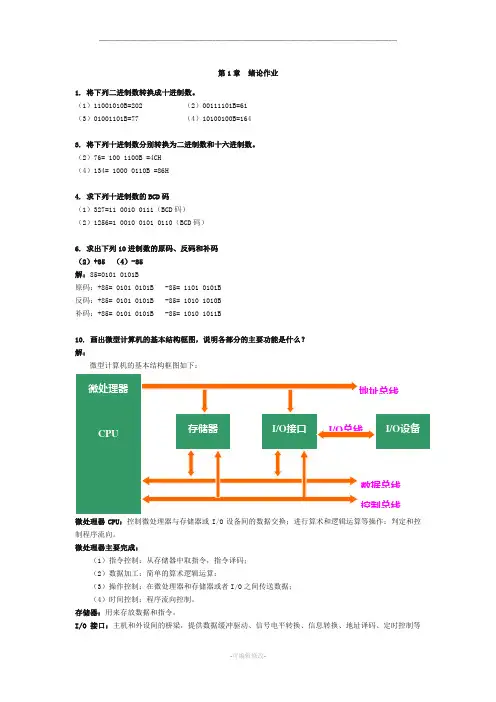
(2)76= 100 1100B =4CH(4)134= 1000 0110B =86H4. 求下列十进制数的BCD码(1)327=11 0010 0111(BCD码)(2)1256=1 0010 0101 0110(BCD码)6. 求出下列10进制数的原码、反码和补码(2)+85 (4)-85解:85=0101 0101B原码:+85= 0101 0101B -85= 1101 0101B反码:+85= 0101 0101B -85= 1010 1010B补码:+85= 0101 0101B -85= 1010 1011B10. 画出微型计算机的基本结构框图,说明各部分的主要功能是什么?解:微型计算机的基本结构框图如下:微处理器CPU:控制微处理器与存储器或I/O设备间的数据交换;进行算术和逻辑运算等操作;判定和控制程序流向。
微处理器主要完成:(1)指令控制:从存储器中取指令,指令译码;(2)数据加工:简单的算术逻辑运算;(3)操作控制:在微处理器和存储器或者I/O之间传送数据;(4)时间控制:程序流向控制。
存储器:用来存放数据和指令。
I/O接口:主机和外设间的桥梁,提供数据缓冲驱动、信号电平转换、信息转换、地址译码、定时控制等各种功能。
I/O设备:输入原始数据和程序,转换成计算机能识别的信息,送入存储器去等待处理。
输出运算结果。
总线:连接计算机系统中各功能部件的信息通道。
第2章 8086CPU作业2. 8086CPU内部由哪两部分组成?它们的大致是如何工作的?答:(1)8086CPU由指令执行部件EU和总线接口部件BIU两部分组成。
(2)① BIU先执行读存储器操作,从给定地址单元中取出指令,送到先进先出的指令队列中等待执行。

第4章汇编语言程序设计1.已知在BUF的起始处保存有N个字符的ASCII码,编写汇编语言程序实现,将这组字符串传送到缓冲区BUFR中,并且使字符串的顺序与原来的顺序相反。
解:BUF DB "BONJOUR_BELLE"BUFR DB 100 DUP(?)MOV CX, NLEA SI, BUFLEA DI, BUFRADD DI,CXDEC DIL1:MOV AL,[SI]MOV [DI],ALINC SIDEC DILOOP L12.利用移位、传送和相加指令实现AX的内容扩大10倍。
解:将扩大后的结果放在DX:AX中,注意到10×AX=8×AX+2×AX。
XOR DX,DXSHL AX, 1RCL DX, 1MOV BX,AXMOV CX,DXSHL AX, 1RCL DX, 1SHL AX, 1RCL DX, 1ADD AX, BXADC DX, CX3.在缓冲区V AR中连续存放着3个16位的无符号数,编写程序实现将其按递增关系排列;如果V AR中保存的为有符号数,则再编写程序实现将其按递减关系排列。
解:V AR DW 1236,-432,3900XOR SI,,SIMOV AX,V AR[SI]CMP AX, V AR[SI+2]JAE L1XCHG AX, V AR[SI+2]L1:CMP AX, V AR[SI+4]JAE L2XCHG AX, V AR[SI+4]L2:MOV V AR[SI], AXMOV AX,V AR[SI+2]CMP AX, V AR[SI+4]JAE L3XCHG AX, V AR[SI+4]L3:MOV V AR[SI+2], AX4.编写程序段实现将AL和BL中的每一位依次交叉,得到的16位字保存在DX中,例如(AL)=01100101B,(BL)=11011010B,则得到的(DX)=10110110 10011001B。
微机原理与接口技术课后部分习题参考答案第一章2. 第3项任务,根据状态标志位的状态决定转移方向。
3. 程序存储是将要执行的程序的全部指令存储到存储器中,程序控制指程序开始执行后,通过指令流控制数据或计算机,完成设定的任务。
4. 分BIU 总线接口部件和EI执行部件两大部件,其中总线接口部件BIU负责取指令和数据,执行部件EI负责执行指令及运算。
在执行一条指令的同时可以取下一条指令,重叠运行,速度快。
5. 有6个状态标志,分别为进位标志CF、溢出标志OF、零标志ZF、奇偶标志PF、负标志SF、辅助进位标志AF。
3个控制标志分别为中断允许标志IF、单步标志TF、方向标志DF。
标志位的内容可以通过标志位操作指令来操作,例如CLC指令清除进位位,即使CF=0,STC指令使CF=1,CLI指令使IF=0,禁止中断,STI指令使IF=1,允许中断。
还可以通过LAHF指令取来标识寄存器的内容修改后用SAHF指令送回去。
也可以用PU SHF/POPF指令来修改标志寄存器的内容。
6. 实模式下分段靠4个段寄存器实现。
段寄存器中的值就是段地址,当偏移地址为0时的段地址+偏移地址就是该段的起始地址。
物理地址是由段地址左移4位后与偏移地址相加形成的20位地址。
7. 说法不一定正确。
对顺序执行指令的计算机是对的。
对重叠或流水线的计算机就不对了。
例如对8086CPU,由于采用了取指令与执行指令的一次重叠,尽管执行一条指令的总时间并没有变化,但连续执行n条指令时,总的时间会大大缩短,可以简单的比喻成总时间为原时间的二分之一,快了一倍。
8. 引入流水线后,执行一条指令的总时间并没有变化。
9. 高速缓存的目的是提高存储器的速度,进而提高了CPU的速度。
虚拟存储器的目的是为了给程序员或程序一个大的存储或运行空间。
10。
8086采用总线接口部件BIU与执行部件EU分开提高了速度,286将8086的BIU进一步分成3个部件,提高了并行性。
“微机系统原理与接口技术”第四章习题解答1.判断以下说法是否正确,如有错,请说明原因并改正。
(1)伪指令在汇编过程中不会产生二进制代码。
(2)宏和过程的相同之处是都可用于简化源程序书写、精简目标代码。
(3)在计算机中,高级语言通常需要转换为汇编语言后才能执行。
(4)汇编语言程序上机一般包括编辑、汇编、链接和调试几个步骤。
答:(1)正确。
(2)错误。
宏不能精简目标代码。
(3)错误。
高级语言程序经编译或解释后直接转换为目标代码。
(4)正确。
2.已知数据和符号定义A1 DB ?A2 DB 8K1 EQU 100判断下列指令的正误,并说明错误指令的原因。
(1)MOV K1,AX(2)MOV A2,AH(3)MOV BX,K1MOV [BX],DX(4)CMP A1,A2(5)K1 EQU 200答:(1)错误。
K1是符号常数,在此处相当于立即数100,故不能做目的操作数。
(2)正确。
(3)正确。
(4)错误。
A1、A2都是字节变量,相当于两个存储器单元,故不能同时出现在一条指令中直接进行比较。
(5)错误。
用EQU定义的符号不能重新赋值,除非已用PURGE解除了原值。
3.若数据段中有定义NUM1 EQU 23HNUM2 DW 0则指令MOV NUM2,NUM1 的源、目操作数的寻址方式以及指令执行后NUM2+1单元的内容分别是什么?答:指令MOV NUM2,NUM1的源操作数使用立即数寻址,目的操作数使用直接寻址。
指令执行后NUM2+1单元的内容是0。
4.设DS=6000H,BX=8432H,SS=5000H,SP=3258H,内存69632H~69635H单元的内容依次是00H、11H、22H、33H。
4字节指令CALL DWORD PTR [BX+1200H] 本身位于2000H:3250H处的双字单元中。
当8086执行该指令后转移至子程序入口时,CS、IP、SS、SP各寄存器以及栈顶2个字单元的内容分别是多少?答:执行结果为CS=3322H,IP=1100H,SS=5000H,SP=3254H,栈顶的两个字即断点地址,为2000H:3254H。
微机原理与接口技术第四章课后习题1.指令主要有哪些分类方式? 其主要类别是什么?答:操作数、级别、功能。
操作数:无操作数、单操作数、双操作数三操作数;级别:机器指令和汇编指令功能:传送类、算术运算类、位操作类、I/O类、串操作类、CPU控制类、转移类;2.80X86的寻址方式有哪些?它们的具体含义是什么?答:操作数寻址方式主要有立即寻址方式、寄存器寻地址、存储器寻址方式、端口寻址方式(1)立即寻址方式:操作对象是这个操作数本身(2)寄存器寻地址:操作对象是寄存器中的内容(3)存储器寻址方式:操作对象是内存地址所对应的存储单元中的内容(4)端口寻址方式:操作数是指明端口的地址、端口地址所对应的端口中的内容是操作对象3. 指出下列各指令中源操作数和目的操作数的寻址方式:⑴MOV BX,WORD PTR[2200H] ⑵ AAA⑶JUM 2200H ⑷ LES DI,[2100H]⑸ MOV [BX+SI+8], BX ⑹ ADD AX,[BP+3000H]答:⑴MOV BX, WORD PTR[2200H] 源操作数:直接寻址;目的操作数:寄存器寻址⑵AAA 源操作数:寄存器寻址AL(也称隐含寻址);目的操作数:寄存器寻址⑶JUM 2200H 程序转移段内直接寻址方式⑷LES DI,[2100H] 源操作数:直接寻址;目的操作数:寄存器寻址⑸MOV [BX+SI+8], BX 源操作数:寄存器寻址;目的操作数:相对基址变址寻址⑹ADD AX,[BP+3000H] 源操作数:直接寻址;目的操作数:寄存器相对寻址4. 设CS=1000H,DS=2000H,ES=3000H,SS=4000H,IP=100H,SP=200H,BX=300H,BP=400H,SI=500 H,则:(1)10202H(2)40300H(3)21010H(4)42156H(5)31510H5.写出清除AX寄存器内容的方法并比较。