机电传动控制 I 总复习 北京化工大学
- 格式:ppt
- 大小:5.57 MB
- 文档页数:113

机电传动控制复习资料《机电传动控制》复习资料第二章:1.如何根据简图写出运动方程式并判断系统的运行状态?P19 T2.32.如何判断TM 或TL 是拖动转矩还是制动转矩?无论是TM 或是TL 和n 的转向相同时时拖动转矩,和n 的转向相反时时制动转矩3.如何判断系统的平衡点是否稳定运行点?P20 T2.114.什么是机电传动系统的负载特性(生产机械的机械特性)同一转轴上负载转矩和转速之间的函数关系称为机电传动系统的负载特性5.常见的生产机械的负载特性有哪几种?恒转矩型负载特性、离心式通风机型负载特性、直线型负载特性、恒功率型负载特性6.为什么要对负载转矩和转动惯量进行折算?为了列出多轴系统的运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量都折算到某一根轴上第四章:1.异步电动机的转子绕组有哪两种形式?线绕式和鼠笼式两种2.简述三相异步电动机的工作原理A 、三相正弦电流相位差为120°时,在定子绕组中产生旋转磁场B 、由于旋转磁场的作用,在转子导体中产生感应电势和感应电流C 、在旋转磁场和感应电流的作用下,产生使转子转动的电磁转矩3.n0 n s 的含义是什么?n ——转子的旋转速度(即电动机的转速)n 0 ——同步转速S ——n0—n 与同步转速n0的比值称为异步电动机的转差率,用S 表示 00n n n s -= 4.三相异步电动机定子绕组线端的连接方式有哪两种?如何选择接法?连接方式有:星型连接和三角形连接两种。
选择接法看P56例题4.15.三相异步电动机型号的意义。
如:Y132S —6Y ——电动机的系列代号132——机座底面至输出轴的中心高为132mmS ——短机座(L 为长机座、M 为中机座)6——磁极数为66.三相异步电动机的额定效率ηN 和额定转矩TN 如何计算N η=NN N N I U P ?cos 3x100% TN=9.55nN PN 7.什么是三相异步电动机的固有机械特性?各有什么特点?异步电动机在额定电压和额定频率下,用规定的接线方式,定子和转子电路中不串联任何电阻或电抗时的机械特性称为固有(自然)机械特性特点:1.T=0,n=n0(S=0),为电动机的理想空载工作点,此时电动机的转速为理想空载转速n0.2.T=TN,n=nN(S=SN),为电动机的额定工作点3.T=Tst,n=0(S=1),为电动机的启动工作点4.T=Tmax,n=nm(S=Sm),为电动机的临界工作点9.对三相异步电动机启动的主要要求是什么?——转矩大,电流小10.三相异步电动机的调速方法有哪几种?变极对数、变转差率、变频11.鼠笼式异步电动机常用的启动方式有哪些?满足什么条件才可以直接启动?启动方式有:直接(全压)启动、定子电路串电阻或电抗器降压启动、Y—Δ降压启动、自耦变压器降压启动第二问:P6712.为什么多速电动机启动时宜先接成低速,然后再换接为高速?多速电动机启动时宜先接成低速,再换接为高速,这样可获得较大的启动转矩。
机电传动控制总复习第1章 绪论1、机电传动系统的主要组成部分。
2、电动机自动控制方式大致可分为哪三种?断续控制、连续控制和数字控制三种。
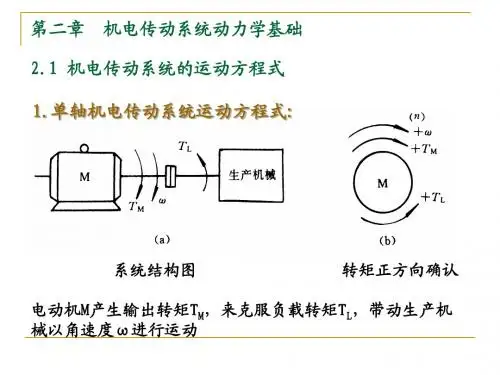
第2章 机电传动系统的动力学基础 1、机电传动系统的运动方程式:dtd JT T L M ω=- (2.1) 运动方程式的实用形式:dt dnGD T T L M 375)(2=- (2.4)2、(1)当L M T T =时,加速度0==dtdna ,则常数=n ,系统处于稳定运行状态(包括静止状态)。
为此,要使系统达到稳定,先决条件必须使L M T T =。
(2)当M T >L T 时,加速度0>dtdn,即转速在升高,系统处于加速过程中。
由此可知,要使系统从静止状态起动运转,必须使起动时的电磁转矩(称之为起动转矩)大于0=n 时的负载转矩。
(3)当M T <L T 时,加速度0<dtdn,转速在降低,系统处于减速过程中。
所以要使系统从运转状态停转(即制动),必须减小电磁转矩使之小于负载转矩,甚至改变M T 的方向。
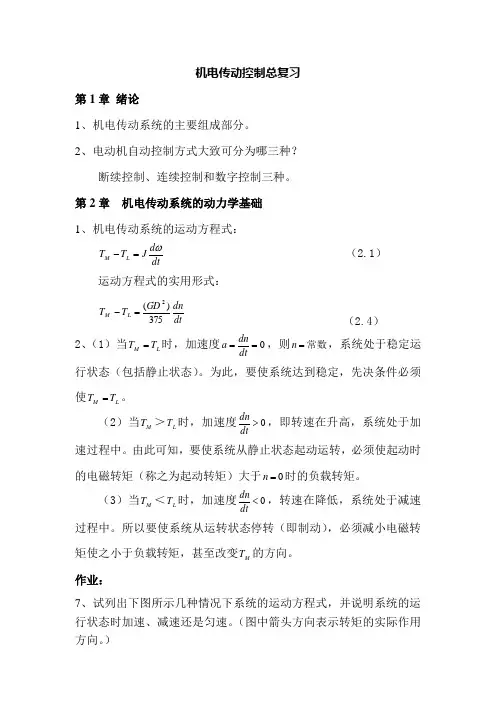
作业:7、试列出下图所示几种情况下系统的运动方程式,并说明系统的运行状态时加速、减速还是匀速。
(图中箭头方向表示转矩的实际作用方向。
)M LT T >M LT T =M LT T =(a ) (b ) (c )M LT T =M LT T <M LT T >(d ) (e ) (f )答:(a )因为T M 为正方向,是拖动转矩,T L 为正方向,是制动转矩,且T d =T M -T L >0,所以系统为加速;(b )因为T M 为负方向,是制动转矩,T L 为正方向,是制动转矩,且T d =T M -T L <0,所以系统为减速;(c )因为T M 为负方向,是制动转矩,T L 为负方向,是拖动转矩,且T d =T M -T L =0,所以系统为匀速;(d )因为T M 为正方向,是拖动转矩,T L 为正方向,是制动转矩,且T d =T M -T L =0,所以系统为匀速;(e )因为T M 为正方向,是拖动转矩,T L 为正方向,是制动转矩,且T d =T M -T L <0,所以系统为减速;(f )因为T M 为负方向,是制动转矩,T L 为正方向,是制动转矩,且T d =T M -T L <0,所以系统为减速;第3章 电动机的工作原理及机械特性 3.1 直流电动机的工作原理及机械特性1、直流电机的基本结构和工作原理2、直流电动机机械特性的一般表达式:02a e e t Δ R U n T n n K K K ΦΦ=-=- (3.13)3、(2)人为机械特性①改变电枢电压U 时的人为机械特性 ②电枢回路中串接附加电阻时的人为机械特性 ③改变磁通Φ时的人为机械特性4、根据直流他励电动机处于制动状态时的外部条件和能量传递情况,它的制动状态分为反馈制动、反接制动、能耗制动三种形式。
机电传动控制复习资料机电传动控制复习资料机电传动控制是现代工业领域中非常重要的一门学科,它涉及到机械、电气、自动化等多个学科的知识。
掌握机电传动控制的原理和技术,对于工程师和技术人员来说至关重要。
在这篇文章中,我们将为大家提供一些机电传动控制的复习资料,帮助大家更好地理解和掌握这门学科。
一、机电传动控制的基础知识1. 机电传动的基本概念:机电传动是指通过机械装置将电能转化为机械能,并实现对机械系统的控制。
机电传动系统由电机、传动装置和控制装置组成。
2. 电机的分类:电机可以分为直流电机和交流电机两大类。
直流电机包括直流励磁电机和直流永磁电机;交流电机包括异步电机和同步电机。
3. 传动装置的分类:传动装置可以分为齿轮传动、带传动、链传动等多种类型。
每种传动装置都有其适用的场合和特点。
4. 控制装置的分类:控制装置可以分为开环控制和闭环控制两种。
开环控制是指在控制过程中,输出信号不受输入信号的影响;闭环控制是指在控制过程中,输出信号受输入信号的反馈影响。
二、机电传动控制的原理和方法1. 机电传动系统的数学模型:机电传动系统可以用数学模型来描述。
通常采用的模型包括电机模型、传动装置模型和负载模型。
2. 机电传动系统的控制方法:机电传动系统的控制方法有很多种,常见的有PID控制、模糊控制、神经网络控制等。
不同的控制方法适用于不同的控制需求和系统特点。
3. 机电传动系统的性能指标:机电传动系统的性能指标包括速度响应、位置精度、稳定性等。
通过合理选择控制方法和参数,可以提高系统的性能。
4. 机电传动系统的故障诊断与维护:机电传动系统在长时间运行中可能会出现故障,及时的故障诊断和维护对于保证系统的正常运行非常重要。
常见的故障诊断方法包括振动分析、温度检测等。
三、机电传动控制的应用领域1. 工业自动化:机电传动控制在工业自动化领域中应用广泛。
它可以实现对生产线的自动化控制,提高生产效率和产品质量。
2. 机器人技术:机电传动控制是机器人技术的核心。


机电传动控制试题库《机电传动控制》课程总复习2013.01一、选择题1、电动机所产生的转矩在任何情况下,总是由轴上的负载转矩和__________ 之和所平衡。
(D)A. 静态转矩B.加速转矩C .减速转矩D .动态转矩2、机电传动系统稳定工作时中如果T M>T L,电动机旋转方向与T M相同,转速将产生的变化是。
(B )A .减速B .加速C.匀速 D .停止3、机电传动系统屮如果T M<T L,电动机旋转方向与T M相同,转速将产生的变化是。
(C )A •加速B •匀速C •减速D •停止4、机电传动系统稳定工作时,如果T M=T L,电动机旋转方向与T M相同,转速将产生的变化是_______ 。
( C)A •减速B •加速C •匀速D •停止5、设电动机某一转动方向的转速n为正,则约定电动机转矩T M与n ____________ 的方向为________ 。
_ ( A ) A•一致、正向 B •一致、反向 C •相反、正向 D •以上都不对6、_______ 作用方向恒定,与运动方向无关。
(C )A •反抗转矩B •离心式转矩C •位能转矩D •恒功率转矩7、起重机吊一个重物升降时,负载的机械特性是__________ _(B )A •恒功率型B •位能型恒转矩C.反抗型恒转矩 D •直线型机械特性8、下面哪个部分是属于直流电动机的定子部分?( C )A •换向器B •电枢绕组C •励磁绕组D •风扇9、复励直流电机的励磁绕组和电枢绕组是_______ 。
( D )A •串联B •并联C •单独分开连接D •一部分串联其他的并联10、直流电动机最常用的启动方式是________ 。
_ ( B )A .串电阻启动B .降压启动C .直接启动D .调节励磁启动11、______ 的调速方式可以实现对恒转矩型负载的无极调速。
(A )A .调压调速B .串电阻调速C .弱磁调速D . A和B12、直流电动机调速系统,若想采用恒功率调速,则可改变_________ 。
机电传动控制复习题(附答案)(DOC)机电传动控制复习题第一章绪论部分一单项选择题:1 机电传动的目的是将电能转换为【A 】 A. 机械能B. 动能C. 势能D. 液压能二多项选择题:1 机电传动的发展大体上经历哪几个阶段?【A B C 】 A. 成组拖动 B. 单电动机拖动 C. 多电动机拖动 D. 单组多动 E. 复合拖动三判断改错题:错误的在括号内画×得2分,将错误更正为正确的得2分;正确的在括号内画√得4分;1 机电传动的目的是将机械能转换为电能。
【× 】更正:机电传动的目的是将电能转换为机械能。
第二章机电传动系统的动力学基础一单项选择题:1 多轴拖动系统中飞轮转矩可根据以下哪种原则折算到电动机轴上?【B 】 A. 机械能守恒B. 动能守恒C. 功率守恒D. 动量守恒2 恒转矩型机械特性的特点是负载转矩为【A 】 A. 常数 B. 在一定范围内变化 C. 随转速增加而正比增加 D. 实数3 电流电动机的电磁转矩T 、负载转矩L T 和空载损耗转矩0T 之间的关系是【B 】 A. 0T T TL += B. 0T T T L += C. 00=++T T T L D. L T T T +=04 多轴拖动系统中各静态负载转矩可根据静态时以下哪种原则折算到电机轴上?【C 】 A. 机械能守恒B. 动能守恒C. 功率守恒D. 动量守恒5 根据转矩正方向的约定,恒转矩型机械特性中,反抗转矩与转速n 的符号关系是【A 】A. 恒相同B. 恒相反C. 取决于电机工作状态D. 跟机械特性有关6 单轴机电传动系统为减速运动时,电机转矩M T 与负载转矩L T 之间的关系是【C 】A. L MT T =B. L M T T >C. L M T T <D. L M T T ≠7 恒转矩型机械特性中,反抗转矩的方向与运动方向的关系是【B 】A. 恒相同B. 恒相反C. 取决于电机工作状态D. 跟机械特性有关 8 恒功率型机械特性的负载转矩与转速n 之间的关系是【B 】A. 成正比B. 成反比C. 无关D. 抛物线函数关系9 单轴机电传动系统处于静态或稳态时,电机转矩M T 与负载转矩L T 之间的关系是【A 】 A. L MT T = B. L M T T >C. L M T T <D. L M T T ≠10 多轴拖动系统中各转动部分的转动惯量可根据以下哪种原则折算到电动机轴上?【B 】 A. 机械能守恒 B. 动能守恒C. 功率守恒D. 动量守恒11 随转速n 的增加,直线型机械特性的负载转矩将【D 】A. 成抛物线变化B. 成正比减小C. 不变D. 成正比增加二多项选择题:1 根据负载转矩与运动方向的关系,可以将恒转矩型的负载转矩分为【A B 】 A. 反抗转矩 B. 位能转矩 C. 动能转矩 D. 拖动转矩 E. 制动转矩2 根据机械特性硬度值的不同,可将电动机机械特性分为【A B C 】A. 绝对硬特性B. 硬特性C. 软特性D. 绝对软特性E. 综合特性三判断改错题:错误的在括号内画×得2分,将错误更正为正确的得2分;正确的在括号内画√得4分;1 若单轴传动系统的转动惯量L T 与转速n 符号相反,则表示L T 为制动转矩。
一、选择题1、电动机所产生的转矩在任何情况下,总是由轴上的负载转矩和 _________之和所平衡。
〔D 〕A.静态转矩 B.加速转矩 C.减速转矩 D.动态转矩2、机电传动系统稳定工作时中如果T >T ,电动机旋转方向与 T 一样,转速将产生的变化M L M是。
〔 B 〕A.减速 B.加速C.匀速 D.停顿3、机电传动系统中如果 T <T ,电动机旋转方向与 T 一样,转速将产生的变化是。
ML M〔 C 〕A.加速 B.匀速 C.减速 D.停顿4、机电传动系统稳定工作时,如果 T =T ,电动机旋转方向与 T 一样,转速将产生的变化ML M是。
〔 C 〕A.减速 B.加速 C.匀速 D.停顿5、设电动机*一转动方向的转速n 为正,则约定电动机转矩 T 与n_________的方向为M_________。
〔 A 〕A.一致、正向 B.一致、反向 C.相反、正向 D.以上都不对6、_________的作用方向恒定,与运动方向无关。
〔 C 〕A.对抗转矩 B.离心式转矩 C.位能转矩 D.恒功率转矩7、起重机吊一个重物升降时,负载的机械特性是_________。
〔 B 〕A.恒功率型 B.位能型恒转矩 C.对抗型恒转矩 D.直线型机械特性8、下面哪个局部是属于直流电动机的定子局部. 〔 C 〕A.换向器 B.电枢绕组 C.励磁绕组 D.风扇9、复励直流机电的励磁绕组和电枢绕组是。
〔 D 〕A.串联 B.并联C.单独分开连接 D.一局部串联其他的并联10、直流电动机最常用的启动方式是_________。
〔 B 〕A.串电阻启动 B.降压启动 C.直接启动 D.调节励磁启动11、_________的调速方式可以实现对恒转矩型负载的无极调速。
〔 A 〕A.调压调速 B.串电阻调速 C.弱磁调速 D.A 和 B12、直流电动机调速系统,假设想采用恒功率调速,则可改变_________。
〔 B 〕A .K B.Φ C.I D.U e a13、直流电动机调速系统,假设想采用恒转矩调速,则可改变_________。