基于嵌入式实时系统的三维地形仿真研究
- 格式:pdf
- 大小:632.75 KB
- 文档页数:5
ARM嵌入式系统3D开发平台的研究与实现的开题报告这份开题报告的目的是介绍我将要进行的论文研究项目,即ARM嵌入式系统3D开发平台的研究与实现。
1. 研究背景随着许多嵌入式设备市场的快速发展,越来越多的消费者对嵌入式设备的性能和功能的要求越来越高。
例如,智能手机、平板电脑、智能家居、智能电视等,都需要具备一定的3D图形处理能力,以提供更加完善的用户体验。
面对这样的市场需求,ARM体系结构的嵌入式系统已成为广泛应用的平台之一。
ARM嵌入式系统的广泛应用使ARM相关的3D图形处理技术得以快速发展。
当前主流的ARM CPU和GPU的设计不断提高性能和集成度,同时更多的人通过开发ARM嵌入式系统来实现3D应用。
ARM嵌入式系统3D开发也成为了一个研究热点。
2. 研究目标本研究的目标是开发一个基于ARM嵌入式系统的3D开发平台,并研究其核心技术及应用。
该平台将提供以下功能:(1)支持OpenGL ES 2.0/3.0标准,以及基于该标准的3D渲染器。
(2)提供完整的3D开发框架,包括物体的创建、场景的搭建、材质的管理、光源的设置、相机的控制等。
(3)通过嵌入式系统提高应用性能,在ARM处理器的低功耗、高性能、低成本等特点下,实现高质量的3D应用程序。
(4)提供易于使用的软件界面,简化开发人员的操作难度。
3. 研究方法和内容本研究主要采用软件开发方法,并结合硬件调试验证实现。
具体的研究内容如下:(1)调研并学习OpenGL ES 2.0/3.0标准,并实现3D渲染器。
(2)设计并实现3D开发框架,包括物体的创建、场景的搭建、材质的管理、光源的设置、相机的控制等。
(3)通过ARM体系结构的特性,对程序性能优化,达到更优的运行效果。
(4)开发易于使用的软件界面,简化开发人员的操作难度。
(5)在硬件平台上进行调试验证,测试平台性能和稳定性。
4. 研究意义本研究的意义主要表现在:(1)为ARM嵌入式系统的3D应用开发提供了一种新的平台。
基于嵌入式系统的室内定位与导航技术研究在现代社会,室内定位与导航技术的发展逐渐成为一项重要的技术研究领域。
嵌入式系统作为室内定位与导航技术的关键组成部分,具有高度可靠性、低功耗和易于集成等特点,得到了广泛的应用。
本文将围绕基于嵌入式系统的室内定位与导航技术展开研究,探讨其概念、原理、技术方法和应用场景等方面的内容。
嵌入式系统是一种在特定领域内运行的计算机系统,具有专用功能,通常用于实时控制、数据采集和通信等任务。
在室内定位与导航技术中,嵌入式系统扮演着重要角色,通过接收、处理和分析传感器数据,提供精准的定位和导航信息。
嵌入式系统的设计需要考虑硬件平台、软件算法和通信协议等方面,以实现对室内环境的精确感知和定位。
室内定位与导航技术的原理主要包括信号传输、信号处理和定位算法等环节。
常见的室内定位技术包括基于无线信号的Wi-Fi定位、蓝牙定位和超宽带定位,以及基于地磁场的磁力计定位和基于惯性传感器的惯性导航等。
在嵌入式系统中,这些技术可以通过无线模块或传感器与主控单元进行通信,并利用定位算法对接收到的数据进行处理,实现对用户位置和移动方向的准确判断。
针对室内定位与导航技术的发展需求,目前涌现出一系列基于嵌入式系统的技术方法。
其中,基于Wi-Fi定位的方法是应用最为广泛的一种。
Wi-Fi定位通过收集Wi-Fi信号强度、到达时间差、地理分布等信息,利用定位算法计算用户的位置。
这种方法既可以利用已有的Wi-Fi基础设施实现定位,又能够应用于新建筑物或封闭环境中。
此外,蓝牙定位和超宽带定位等新兴技术在室内定位与导航领域也表现出良好的应用前景。
除了基于无线信号的定位技术,磁力计定位和惯性导航等技术也在室内定位与导航领域取得了突破。
磁力计定位是利用地磁场的空间分布来确定用户位置的方法,适用于没有Wi-Fi或蓝牙覆盖的场所。
惯性导航则是利用惯性传感器(如加速度计和陀螺仪)测量用户的加速度、角速度和姿态等信息,通过积分和滤波算法实现导航。
嵌入式系统地形三维显示技术研究
王纲;岳春生;李建新
【期刊名称】《信息工程大学学报》
【年(卷),期】2006(007)001
【摘要】针对嵌入式系统存储资源及计算能力有限的问题,通过建立四叉树高程数据压缩存储模型,并根据飞行漫游、行进三维显示视点参数和显示设备特性对三维地形数据进行适当裁减简化,研究基于多分辨处理、递归简化处理等方法的嵌入式系统地形三维处理技术.
【总页数】3页(P82-84)
【作者】王纲;岳春生;李建新
【作者单位】信息工程大学,信息工程学院,河南,郑州,450002;信息工程大学,信息工程学院,河南,郑州,450002;信息工程大学,信息工程学院,河南,郑州,450002
【正文语种】中文
【中图分类】TP391.41
【相关文献】
1.基于OpenGL和地形图支撑下的地形三维显示 [J], 吕恒;江南
2.基于嵌入式系统的三维地形生成技术研究 [J], 迟贤书;孙劲光
3.基于OpenGL ES的地形三维显示技术研究 [J], 康利刚
4.基于R2V与ArcGIS的地形图数字化与三维显示研究 [J], 陈伦祥;王晓红;王阳
5.断裂地形的处理及三维显示 [J], 陈天伟;蓝贵文
因版权原因,仅展示原文概要,查看原文内容请购买。
基于嵌入式系统的三维模型生成技术研究随着科技的不断发展和应用领域的不断扩大,嵌入式技术已经成为了现代社会中一个非常重要的应用领域。
同时,三维技术的应用也越来越广泛,而基于嵌入式系统的三维模型生成技术则成为了这方面的一个重要组成部分。
在本文中,我们将对基于嵌入式系统的三维模型生成技术进行深入的探讨和研究。
一、嵌入式系统概述嵌入式系统是一种基于计算机技术的应用系统,它不同于普通计算机系统,其主要特征是将各种系统和硬件设施集成在一起,使之成为一个完整的整体。
嵌入式系统广泛应用于各种智能装置和工业控制等领域中,例如智能家居、智能交通、电子商务等领域。
它的出现和发展使得现代化技术应用更加普及化和便利化。
二、三维技术概述三维技术是指一种把物理世界的三个坐标系(长、宽、高)用计算机语言表述出来的技术。
它可以呈现出真实的立体感和空间感,是影视、游戏、建筑等领域中的重要应用。
三维技术的核心就是三维模型,能否快速高效的生成三维模型是三维技术应用开发的重要环节之一。
三、基于嵌入式系统的三维模型生成技术基于嵌入式系统的三维模型生成技术,是将嵌入式系统的计算和控制能力结合到三维技术中,实现三维模型的快速、高效、低耗能的生成。
嵌入式系统在三维技术中的作用主要是负责数据处理和计算,这样可以避免在三维模型生成过程中出现的卡顿和相应速度慢等问题。
基于嵌入式系统的三维模型生成技术主要有以下几个优点:一、增强了系统的实时性由于嵌入式系统的实时性能强,可提供较高的执行效率,因此可以大大提高三维模型的生成速度,使其更具有实用价值。
二、提高了系统的可靠性和稳定性嵌入式系统具有批量生产、高可靠性等特点,在实际的三维应用中,可以降低系统的故障率和误差率,保障系统的稳定性。
三、降低了成本随着技术的不断发展,嵌入式系统的生产成本和应用成本不断降低,使得基于嵌入式系统的三维模型生成技术更加普遍化和应用化,这样可以降低整个系统的成本,提高成本效益。
四、广泛应用基于嵌入式系统的三维模型生成技术广泛应用于数字游戏、建筑、VR/AR、卡通、影视、汽车制造等领域。
《基于嵌入式系统的北斗-GPS-SINS组合导航系统设计与实现》篇一基于嵌入式系统的北斗-GPS-SINS组合导航系统设计与实现一、引言随着科技的不断发展,导航技术在各行各业中的应用日益广泛。
作为现代社会的重要技术手段,导航系统的设计不仅涉及到多学科的知识融合,而且其实现过程的复杂性和精细度也在不断提升。
在众多的导航系统中,北斗/GPS/SINS(北斗卫星导航系统、全球定位系统、捷联式惯性测量系统)组合导航系统凭借其独特的优势和良好的互补性,逐渐成为了众多应用领域的首选。
本文将就基于嵌入式系统的北斗/GPS/SINS组合导航系统的设计与实现进行深入探讨。
二、系统设计概述(一)设计目标本系统设计的主要目标是实现北斗/GPS/SINS的组合导航,提高导航的精度和可靠性,满足各种复杂环境下的导航需求。
通过嵌入式系统的开发,将组合导航系统应用于各类设备中,实现高效、精准的定位和导航。
(二)设计原理本系统设计基于嵌入式系统技术,结合北斗/GPS/SINS的各自优势,通过数据融合算法实现组合导航。
其中,北斗和GPS提供全球定位信息,SINS提供高精度的姿态和速度信息,三者之间的数据通过算法进行融合,从而得到更准确、更稳定的导航信息。
三、系统硬件设计(一)处理器选择系统硬件的核心是处理器,本系统选择高性能的嵌入式处理器,具备强大的数据处理能力和良好的功耗控制能力。
(二)模块设计系统硬件包括北斗/GPS接收模块、SINS测量模块、数据传输模块等。
其中,北斗/GPS接收模块负责接收卫星信号并转换为数字信号;SINS测量模块负责测量姿态和速度信息;数据传输模块负责将处理后的数据传输给上位机或其它设备。
四、系统软件设计(一)操作系统选择本系统选择适用于嵌入式系统的实时操作系统,以保证系统的稳定性和实时性。
(二)软件开发环境搭建为方便开发,搭建了包括编译器、调试器等在内的软件开发环境。
同时,为保证软件的兼容性和可移植性,采用模块化设计方法进行软件开发。
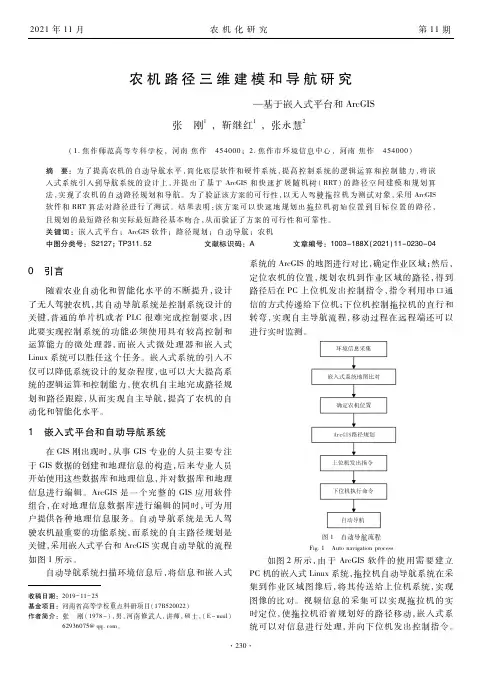
农机路径三维建模和导航研究—基于嵌入式平台和ArcGIS张 刚1,靳继红1,张永慧2(1.焦作师范高等专科学校,河南焦作 454000;2.焦作市环境信息中心,河南焦作 454000)摘 要:为了提高农机的自动导航水平,简化底层软件和硬件系统,提高控制系统的逻辑运算和控制能力,将嵌入式系统引入到导航系统的设计上,并提出了基于ArcGIS和快速扩展随机树(RRT)的路径空间建模和规划算法,实现了农机的自动路径规划和导航。
为了验证该方案的可行性,以无人驾驶拖拉机为测试对象,采用ArcGIS软件和RRT算法对路径进行了测试。
结果表明:该方案可以快速地规划出拖拉机初始位置到目标位置的路径,且规划的最短路径和实际最短路径基本吻合,从而验证了方案的可行性和可靠性。
关键词:嵌入式平台;ArcGIS软件;路径规划;自动导航;农机中图分类号:S2127;TP311.52 文献标识码:A文章编号:1003-188X(2021)11-0230-040 引言随着农业自动化和智能化水平的不断提升,设计了无人驾驶农机,其自动导航系统是控制系统设计的关键,普通的单片机或者PLC很难完成控制要求,因此要实现控制系统的功能必须使用具有较高控制和运算能力的微处理器,而嵌入式微处理器和嵌入式Linux系统可以胜任这个任务。
嵌入式系统的引入不仅可以降低系统设计的复杂程度,也可以大大提高系统的逻辑运算和控制能力,使农机自主地完成路径规划和路径跟踪,从而实现自主导航,提高了农机的自动化和智能化水平。
1 嵌入式平台和自动导航系统在GIS刚出现时,从事GIS专业的人员主要专注于GIS数据的创建和地理信息的构造,后来专业人员开始使用这些数据库和地理信息,并对数据库和地理信息进行编辑。
ArcGIS是一个完整的GIS应用软件组合,在对地理信息数据库进行编辑的同时,可为用户提供各种地理信息服务。
自动导航系统是无人驾驶农机最重要的功能系统,而系统的自主路径规划是关键,采用嵌入式平台和ArcGIS实现自动导航的流程如图1所示。
嵌入式平台上的三维重建算法研究蒋林;郭晨;朱志超;程文凯【摘要】针对当前在嵌入式平台上的三维重建实时性和点云配准精度下降的问题,提出了一种简单的位姿估计方法并在此基础上实现了基于视觉的三维重建.将差动式驱动的移动机器人运动简化为在同一时刻只有水平转动或者同一时刻只有直线平移.对分解后的两种运动形式采用不同的简化算法,在降低计算量的同时保证模型精度.通过基于标准数据集的离线实验和基于真实环境的机器人在线实现结果表明,提出的方法能够满足室内环境重建的精度和实时性.【期刊名称】《机械设计与制造》【年(卷),期】2018(000)008【总页数】3页(P256-258)【关键词】嵌入式平台;运动分解;基础矩阵;奇异值分解;转换矩阵;Laplacian算子【作者】蒋林;郭晨;朱志超;程文凯【作者单位】武汉科技大学机械自动化学院,湖北武汉 430081;武汉科技大学机械自动化学院,湖北武汉 430081;武汉科技大学机械自动化学院,湖北武汉430081;武汉科技大学机械自动化学院,湖北武汉 430081【正文语种】中文【中图分类】TH161 引言随着科学技术的发展,二维图像包含的信息已不能满足人们的需要,因此对真实场景的三维重建越来越受到广大学者的关注。
在三维重建中机器人位姿的实时精确估计主要依靠轮式里程计、惯性测量单元、全球定位系统和视觉里程计等[1]。
视觉里程计是其中重要的一种位姿估计方法。
文献[2]提出了一种基于光一致性假设的视觉里程计方法(DVO,densevisual odometry)提高了位姿估计的精度和鲁棒性。
文献[3]借鉴立体视觉里程计流程设计了一套基于Kinect的视觉里程计系统(FOVIS,fast odometry from vision)仅利用深度信息对相机位姿进行快速估计。
文献[4]提出了一种帧到模型的视觉里程计方法(FOV,fast visual odometry),实现了数据集和模型集的快速配准。
嵌入式GIS的三维地形显示算法研究
范丹丹;金梁;陈明
【期刊名称】《测绘科学》
【年(卷),期】2006(31)6
【摘要】本文论述了基于嵌入式G IS的三维地形显示的一系列理论和算法。
首先介绍了三维地形显示的基本算法步骤,接下来针对嵌入式系统的特点,提出了三个改进方面,分别是递归细分、坐标变换和内存调度。
在论文的最后,给出了实验结果并进行了总结。
【总页数】2页(P158-159)
【关键词】嵌入式GIS;DEM模型;递归细分;投影变换;内存调度
【作者】范丹丹;金梁;陈明
【作者单位】解放军信息工程大学NDSC研究所
【正文语种】中文
【中图分类】P208
【相关文献】
1.嵌入式系统地形三维显示技术研究 [J], 王纲;岳春生;李建新
2.三维地形显示中的三角网格局部细分算法研究 [J], 黄有群;张然然
3.基于嵌入式GIS的地图显示算法研究 [J], 赵宇峰;孙伟华;王建国
4.三维地形显示中数据缓存与调度算法研究 [J], 鲁萌;刘建波;杨进
5.基于RS和GIS的森林资源类型三维地形显示与分析 [J], 王小东
因版权原因,仅展示原文概要,查看原文内容请购买。
基于嵌入式系统的EFIS三维地形软件设计
杨昕欣;张晓林
【期刊名称】《计算机工程与应用》
【年(卷),期】2004(40)10
【摘要】在EFIS软件上进行三雏地形的显示,能使飞行员快速直观地了解到飞机当前的态势和飞行前方的地形,从而及时做出反应.EFIS是典型的嵌入式系统,在其上进行真实感三维处理,必须在有限的系统资源和复杂的图形算法之间进行折衷.该文采用基于视相关的格网地形数据结构,降低了对系统内存的需求.在此基础上采用简化的三雏处理系统,在嵌入式操作系统上设计了投影、变换、消隐等模块,实现了三维地形的实时显示,提高了飞行员对态势的感知度.
【总页数】4页(P111-113,133)
【作者】杨昕欣;张晓林
【作者单位】北京航空航天大学电子信息工程学院,北京,100083;北京航空航天大学电子信息工程学院,北京,100083;北京航空航天大学电子信息工程学院,北
京,100083
【正文语种】中文
【中图分类】TP391.41
【相关文献】
1.基于嵌入式系统的三维地形生成技术研究 [J], 迟贤书;孙劲光
2.基于量子框架和Stateflow模型的嵌入式系统软件设计 [J], 刘芮滦;邓杨;史伟娜;
刘志
3.基于UEFI的基础加电BIT软件设计与实现 [J], 张拓智;赵腊才;张双;朱恩亮;郑涛
4.基于嵌入式系统的C语言编程软件设计研究 [J], 徐玉莲
5.基于QT的嵌入式系统文件传输上位机软件设计 [J], 贾贝贝;康明才
因版权原因,仅展示原文概要,查看原文内容请购买。