偏振光导航传感器
- 格式:pptx
- 大小:420.53 KB
- 文档页数:9

偏振导航机理导言偏振导航是一种利用人工合成的偏振光进行定位和导航的技术。
它基于光的偏振性质和地球磁场变化之间的关联,通过观测光传播过程中的光线偏振角度变化,实现精确定位和导航。
本文将探讨偏振导航的机理以及其在现代导航系统中的应用。
一、偏振光的基本概念偏振光是指光中振动方向保持一致的光。
通常,光是以横向电磁波的形式传播的,而电磁波的振动方向可以在垂直于传播方向的平面内任意方向上变化。
偏振光则是指这一振动方向限定在某一特定方向上的光。
二、光的偏振态描述光的偏振态可以用偏振椭圆或偏振矢量来描述。
偏振椭圆是指偏振光在平面垂直于传播方向上的椭圆轨迹。
而偏振矢量则指偏振光的振动方向。
在偏振椭圆中,主要有线偏振和圆偏振两种形式。
线偏振指偏振光在平面垂直于传播方向上的椭圆轨迹为直线。
而圆偏振则是指椭圆轨迹为圆形。
三、光的偏振现象光在传播过程中会发生偏振现象,即光的振动方向发生改变。
这是由于光在各种介质中的传播速度和传播路径与连接光传播方向和电场方向的矢量之间的关系。
其中,最常见的偏振现象是波片的吸收和反射。
当光从介质中经过后,它的振动方向可能发生改变。
这可以用玻璃窗作为例子,当光从窗玻璃中传过来时,有一部分光相对于原来的方向发生了改变。
四、地球磁场与偏振导航地球磁场是指地球周围的磁场空间。
它对地球上的物质和现象起着重要的影响。
由于地球磁场的存在,光在传播过程中会受到磁场的影响,从而导致光的偏振角度发生变化。
基于这个原理,研究人员发展出了偏振导航技术。
通过利用人工合成的偏振光对地球磁场的敏感性,可以实现在地球上的定位和导航。
偏振导航系统利用各种传感器和仪器来测量光的偏振角度变化,并计算出相应的位置和方向信息。
五、偏振导航的应用偏振导航技术在许多领域中都有广泛的应用。
在航空航天领域,偏振导航被用于飞行器的精确定位和导航。
通过测量飞行器周围的偏振光角度变化,可以提供更准确的飞行路径和位置信息,提高飞行安全性。
此外,偏振导航还被应用于海洋勘探、地质勘查、军事侦查等领域。
(1)概述偏振光的优势:在较大范围内很难受人为因素的干扰和破坏,特别是在弱/无卫星导航信号的“特殊环境下”仍能提供导航信息。
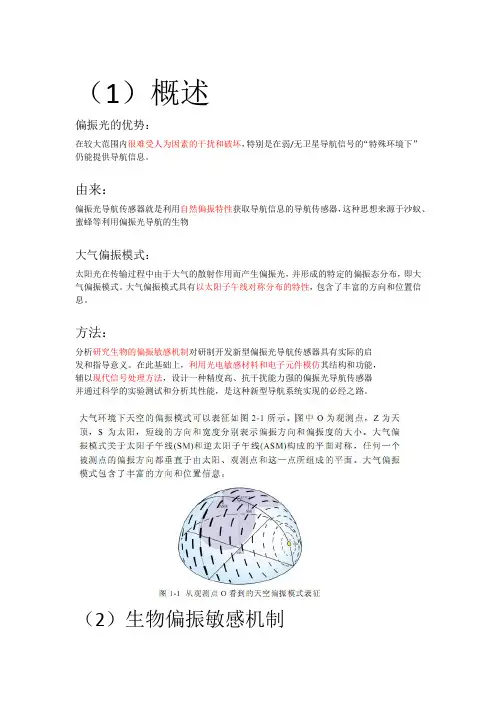
由来:偏振光导航传感器就是利用自然偏振特性获取导航信息的导航传感器,这种思想来源于沙蚁、蜜蜂等利用偏振光导航的生物大气偏振模式:太阳光在传输过程中由于大气的散射作用而产生偏振光,并形成的特定的偏振态分布,即大气偏振模式。
大气偏振模式具有以太阳子午线对称分布的特性,包含了丰富的方向和位置信息。
方法:分析研究生物的偏振敏感机制对研制开发新型偏振光导航传感器具有实际的启发和指导意义。
在此基础上,利用光电敏感材料和电子元件模仿其结构和功能,辅以现代信号处理方法,设计一种精度高、抗干扰能力强的偏振光导航传感器并通过科学的实验测试和分析其性能,是这种新型导航系统实现的必经之路。
(2)生物偏振敏感机制沙蚁并不知道任何时刻特定的e-矢量发生在哪里,但是它们的罗盘系统可以成功的处理任何部分天光偏振模式,只要沙蚁在往返途中经历的是同一部分模式。
??????????昆虫的DRA 小眼具有以下的普遍特征1. 在偏振敏感的DRA小眼中,微绒毛沿感杆束整齐阵列,而在DRA以外的区域,要么是微绒毛排列不整齐,要么是整个感杆束扭曲。
因此,DRA中的偏振敏感性很高而在其它区域微弱或者几乎没有。
2. DRA中每个小眼由微绒毛互相交叉垂直的单向光感受器组成,它们所调谐的e-矢量方向正交,这种对抗机制使系统独立于周围环境的光强。
3. 与一般小眼的感杆束相比,DRA的感杆束在形状、宽度和长度上均有所不同,它们更短并具有更大的横截面。
缩短感杆束可以减少自放映促进偏振敏感度,而加宽感杆束的横截面可以提高绝对灵敏度。
4. 许多昆虫小眼的光学性能退化,从某种程度上显著提高了DRA小眼的视野。
如,蜜蜂DRA小眼的角膜中包含轻微的散射孔道,而蟋蟀DRA小眼既缺少对外角膜又没有放映色素。
这些特征减弱了DRA小眼的光学特性,增强了光感受器的视野作用。
一种基于天空光的新型成像式仿生偏振导航传感装置李彬;关乐;刘琦;褚金奎【摘要】模仿昆虫偏振导航机理,设计了成像式仿生偏振导航传感装置样机。
研究了天空光偏振分布模型,分析了成像式仿生偏振导航传感装置工作原理。
解决了一般探测装置解算偏振参数需要上位机辅助的问题,使用CMOS图像传感器和数字信号处理器,实时输出导航角度。
进行了室内、室外装置性能测试,获得了3个方向偏振分量标准化强度曲线。
实验结果表明:传感装置室内外角度测量误差分别为-0.8°~0.3°,-1.2°~1.4°,能够较高精度地输出导航角度,可以满足实时导航定位的需要。
%A novel imaging bionic polarization navigation sensing device proto is designed by employing insect strategies for navigation. The skylight polarization distribution model is studied,and work principle of imaging bionic polarization navigation sensing device solves is analyzed. The problem of normal detection device polarized parameters needs upper PC aided,by using CMOS sensor and DSP,real time output navigation angle. Performance experiments are presented indoor and outdoor,and normalized intensity curves of the polarized component in three directions are obtained. Experimental result indicates that error of angle measurement of sensing device is-0. 8°~0. 3°(indoor)and -1. 2°~1. 4°(outdoor),it can output navigation angle with high precision and meet requirement of realtime navigation.【期刊名称】《传感器与微系统》【年(卷),期】2014(000)008【总页数】4页(P69-72)【关键词】偏振导航;天空光偏振分布模型;数字信号处理器;CMOS图像传感器【作者】李彬;关乐;刘琦;褚金奎【作者单位】大连理工大学精密特种加工教育部重点实验室,辽宁大连116023;大连理工大学精密特种加工教育部重点实验室,辽宁大连116023;大连理工大学精密特种加工教育部重点实验室,辽宁大连116023;大连理工大学精密特种加工教育部重点实验室,辽宁大连116023【正文语种】中文【中图分类】TP212现代生物学家通过研究发现,蜣螂等昆虫能够利用其偏振视觉(对天空光偏振方向极其敏感的视觉组织、器官与神经系统)分析天空中存在的一个相对稳定的偏振光(polarized light,POL)分布模式图来进行导航定位[1]。
摘要仿生偏振导航作为天文导航的一种,具有完全自主、不易受干扰和无时间积累误差等优势,在国内外引起广泛关注。
现有的成像式偏振导航传感器通常使用工业相机和线偏振片组合检测天空偏振光,需要使用至少三个成像模块才能解算天空的偏振信息,设备复杂、实时性较差且各模块间不可避免的存在装配误差,限制了其应用场景。
为了解决成像式偏振导航传感器设备结构复杂、实时处理能力差等问题,本文设计了一种基于成像原理的集成化偏振光导航传感器。
首先在CMOS图像传感器表面集成了含有四个不同方向偏振化单元的双层金属纳米光栅,实现单个成像模块检测多方向的偏振光,极大的减小了传感器的整体尺寸,且各偏振化单元之间相对角度精确,没有分立器件带来的装配误差。
然后设计了以STM32F767系列微控制器为核心的传感器硬件系统,该系统集成度高,具有实时处理能力。
最后编写了运行在传感器上的嵌入式软件,实现偏振信息图像采集与偏振方位角实时解算输出等功能。
在室内理想偏振光环境下对集成化偏振导航传感器光学性能进行了校正,标定后传感器的测角误差不超过±0.1°。
为了消除室外环境中随机遮挡对传感器造成的影响,加入了一种可以工作在不同环境光下的自适应鲁棒性算法,在室外静态实验中传感器测角误差不超过±0.4°。
最后将传感器安装在地面机器人上进行了动态导航实验,地面机器人可以依靠传感器提供的航向信息沿着预定轨迹移动。
本文设计的集成化偏振导航传感器鲁棒性好、集成度高、尺寸小,适合应用在无人机、地面机器人等对尺寸重量要求较高的载具上。
关键词:偏振导航;集成化传感器;图像传感器Design of Integrated Polarization Navigation Sensor Based on ImagingPrincipleAbstractAs a kind of astronomical navigation, bionic polarization navigation has the advantages of complete autonomy, less susceptibility to interference, and no time accumulation error, which has attracted widespread attention at home and abroad. At present, the camera-based polarization navigation sensor utilized cameras and linear polarizers to detect sky polarized light. It required at least three imaging modules to solve the sky polarization information, which means complicated structure and lack of real-time processing capability. Inevitably, there was installation error between each imaging modules, which limiting its application scenarios.To solve the problems of complex structure and poor real-time processing capability of the camera-based polarization sensor, this paper designed an integrated polarization navigation sensor based on imaging principle. On the surface of the CMOS image sensor, a double-layer metal nanograting with four polarization units in different directions was integrated to detect polarized light in multiple directions by a single imaging module. It greatly reduced the overall size of the sensor, and the relative angle of each polarization unit was accurate, which means there was no assembly error caused by discrete devices. The sensor, with the STM32F767 series MCU as the main control chip, had real-time processing capabilities. The embedded software was also designed to resolve the polarization information and output through the serial port. To calibrate the system error of the sensor, an Ethernet interface was added to the sensor, which could directly output the polarization information picture to the upper computer. The upper computer calibration software was designed to receive the polarization information picture from the sensor and get the calibration coefficient for the sensor.The optical performance of the integrated polarization navigation sensor was corrected under the ideal polarized light environment indoors. The measurement error of the sensor after calibration was below ±0.1°. To eliminate the effect of random occlusion on the sensor in the outdoor environment, a self-adaptive robust algorithm which could work in different ambient light was added. The measurement error in outdoor static experiments was below ±0.4°. The sensor was mounted on the mobile robot for the dynamic navigation experiment, which indicated that the proposed integrated polarization navigation sensor could provide heading information and was suitable for portable vehicle navigation.Key Words:Polarization Navigation; Integrated Sensor; Imaging Sensor- II -目录摘要 (I)Abstract (II)1 绪论 (1)1.1 选题背景及研究意义 (1)1.2 国内外研究现状 (2)1.2.1 生物导航机理 (2)1.2.2 仿生偏振导航研究现状 (6)1.3 本文研究内容 (7)2 仿生偏振导航原理 (9)2.1 大气偏振模式 (9)2.2 偏振导航原理 (12)2.3 本章小结 (15)3 集成化偏振导航传感器硬件设计 (16)3.1 偏振成像模块 (17)3.2 偏振采集模块 (18)3.2.1 偏振采集模块供电设计 (18)3.2.2 偏振采集模块输入信号电路设计 (19)3.2.3 偏振采集模块输出信号电路设计 (20)3.3 偏振信息处理模块 (21)3.3.1 传感器主控核心 (21)3.3.2 数字摄像头接口 (22)3.3.3 外部存储 (23)3.3.4 以太网传输接口 (25)3.3.5 JTAG调试接口 (26)3.4 传感器整体搭建 (27)3.5 本章小结 (27)4 集成化偏振导航传感器软件设计 (28)4.1 嵌入式开发环境 (28)4.1.1 硬件抽象层驱动库 (28)4.1.2 实时嵌入式操作系统 (30)4.2 传感器系统功能设计 (31)4.2.1 传感器初始化 (31)4.2.2 偏振信息图片采集 (32)4.2.3 偏振方位角解算 (33)4.2.4 偏振信息输出 (33)4.3 上位机图像采集标定 (34)4.3.1 标定算法 (34)4.3.2 上位机标定软件 (36)4.4 本章小结 (36)5 传感器测试 (37)5.1 传感器室内标定及性能测试 (37)5.2 传感器自适应鲁棒性算法 (39)5.3 室外导航实验 (42)5.4 本章小结 (43)结论 (44)参考文献 (45)攻读硕士学位期间发表学术论文情况 (50)致谢 (51)大连理工大学学位论文版权使用授权书 (52)- IV -1 绪论1.1 选题背景及研究意义在人类社会中,航海时代、航空航天时代的不断开启促进了导航技术的革命。
仿生偏振导航传感器原理样机与性能测试研究的开题报告一、选题背景和意义随着机器人技术的不断发展,机器人在各行各业中的应用愈加广泛。
其中,机器人的自主导航能力是机器人实现任务的重要保证,而自主导航常常需要依赖传感器获取周围环境信息。
目前,常用的导航传感器有激光雷达、视觉传感器等,但这些传感器在使用时存在着一些问题,如激光雷达易受光照干扰,视觉传感器对光线和复杂环境的依赖性较大。
因此,研究一种新型的导航传感器成为了当今机器人导航领域中的热点问题之一。
本选题选取的是仿生偏振导航传感器。
仿生偏振导航传感器是一种以仿生学原理为基础进行设计的新型传感器,具有成像速度快、不受光照干扰、对复杂环境适应性强等优点。
因此,研究仿生偏振导航传感器的原理以及样机性能,对于提高机器人导航的精度、速度和稳定性具有重要意义。
二、研究内容和目标本研究计划从理论探究到实际验证,分别从以下几个方面展开:1. 仿生偏振导航传感器的基本原理和工作机制的研究:首先探究仿生偏振导航传感器的基本原理和工作机制,研究其仿生学背景和工程应用中的具体体现。
2. 仿生偏振导航传感器样机的设计与制造:在了解了仿生偏振导航传感器的原理之后,根据选题的实际需要设计一种仿生偏振导航传感器的样机,并使用3D打印等技术对其进行制造。
3. 仿生偏振导航传感器性能测试:对制造出来的仿生偏振导航传感器进行性能测试,包括精度、速度和稳定性等方面。
4. GPS和激光雷达的对比实验:对比研究仿生偏振导航传感器和传统导航传感器的精度、速度和稳定性进行实验验证。
本研究的目标是通过对仿生偏振导航传感器原理的研究、样机的设计与制造以及性能测试,探索一种新型导航传感器的应用前景,为机器人导航技术的进一步发展提供参考和支持。
三、研究方法和步骤1. 文献资料研究法:通过查阅相关文献,深入了解仿生偏振导航传感器的原理和应用技术。
2. 数学模型法:基于仿生学原理及导航技术的特点,建立仿生偏振导航传感器的数学模型,探究仿生偏振导航传感器的工作原理和规律。
专利名称:一种微型两通道偏振导航敏感器及使用方法专利类型:发明专利
发明人:黄河,周军,王启
申请号:CN202010308066.2
申请日:20200417
公开号:CN111504303A
公开日:
20200807
专利内容由知识产权出版社提供
摘要:本发明涉及一种微型两通道偏振导航敏感器及使用方法,敏感器是一种两通道偏振导航敏感器,两个通道的四个光路共用石英片、滤光片、偏振片等光学镜片。
选用了一种特制偏振片,在单片偏振片上集成了四个不同的偏振方向,分别是0°、45°、90°和135°,其中0°与90°组成通道
一,45°与135°组成通道二。
为了避免不同通道的偏振光的相互干扰,同时为了减少杂散光,在石英片与滤光片组件载体的底部以及压制铝片上设计了分光通道。
本发明有效地实现偏振导航角的求解,而且精度较高,设计结构紧凑,导航过程稳定可靠,实现了小型化、轻型化,偏振敏感器组装简单易行,安装方便,可以应用在在车辆、机器人、无人飞行器、航天器等各类运动物体导航中,具有广阔的应用前景。
申请人:西北工业大学
地址:710072 陕西省西安市友谊西路127号
国籍:CN
代理机构:西北工业大学专利中心
代理人:王鲜凯
更多信息请下载全文后查看。
基于偏振光传感器的移动机器人导航实验褚金奎;陈文静;王洪青;戎成功【期刊名称】《光学精密工程》【年(卷),期】2011(019)010【摘要】根据沙蚁Cataglyphis的导航机理研制了一种检测天空偏振光的导航传感器.为测试传感器室外导航性能,设计了采用传感器输出的航向角控制移动机器人按特定轨迹运动的实验.首先,介绍传感器的结构原理及功能模型,为提高传感器精度,在室内用光学积分球模拟天空偏振光源,用精密转台对传感器输出角度进行补偿,补偿后传感器误差在士0.2°以内.然后,简要说明采用的移动机器人平台结构和采用传感器导航的方法.最后,描述导航实验过程,得到了利用光电编码盘输出角度信息与利用偏振光传感器输出航向角两种导航方法的对比实验结果.结果显示,偏振光传感器导航相对于光电编码盘较为精确,二者平均位置误差分别是1.17 cm和31.6 cm.实验证实偏振光传感器误差不随时间累积,能够自主完成移动机器人导航,可用于移动载体自主导航系统.【总页数】8页(P2419-2426)【作者】褚金奎;陈文静;王洪青;戎成功【作者单位】大连理工大学机械工程学院,辽宁大连116024;大连理工大学机械工程学院,辽宁大连116024;大连理工大学机械工程学院,辽宁大连116024;大连理工大学机械工程学院,辽宁大连116024【正文语种】中文【中图分类】TP212.14【相关文献】1.基于无线传感器网络的移动机器人导航方法 [J], 贾思强;高翔;陆起涌2.基于无线传感器网络的移动机器人导航方法 [J], 贾思强;高翔;陆起涌;3.基于粒子滤波的全方位视觉传感器实现移动机器人导航 [J], 李雁斌;曹作良;刘常杰;叶声华4.基于传感器信息的智能移动机器人导航评述 [J], 辛江慧;李舜酩;廖庆斌5.用于移动式机器人导航的仿生偏振光导航传感器 [J], 刘硕;因版权原因,仅展示原文概要,查看原文内容请购买。
基于Zynq处理器的成像式偏振导航传感器
路澳航;关传泷;纪元宇;褚金奎
【期刊名称】《微纳电子技术》
【年(卷),期】2024(61)6
【摘要】偏振导航是一种受昆虫偏振视觉启发的仿生天文导航方法。
使用纳米压印技术将金属纳米光栅阵列集成在互补金属氧化物半导体(CMOS)图像传感器的感光区域,制作出模仿昆虫感知偏振光的偏振敏感器件。
采用现场可编程门阵列(FPGA)与高级精简指令集机器(ARM)架构相异构的主控芯片Zynq实时处理偏振信息,制作了成像式偏振导航传感器。
传感器在FPGA端实现了偏振图像的采集、解码以及解算的硬件加速,在ARM端移植Linux系统,实现多任务之间的协作和同步。
可通过预留的串口输出航向角、网口输出图像,频率约为10 Hz。
标定后传感器室内实验偏振角误差为±0.15°,从室外实验采集的大气偏振分布模式图中能清晰分辨出太阳子午线,经过补偿后航向角误差为±0.4°。
【总页数】9页(P116-124)
【作者】路澳航;关传泷;纪元宇;褚金奎
【作者单位】大连理工大学机械工程学院
【正文语种】中文
【中图分类】TP212
【相关文献】
1.一种基于天空光的新型成像式仿生偏振导航传感装置
2.用于移动式机器人导航的仿生偏振光导航传感器
3.三通道偏振成像导航传感器的设计与应用
4.基于微偏振阵列成像的实时天空偏振光导航
5.基于FPGA与CMOS图像传感器的集成式偏振导航传感器
因版权原因,仅展示原文概要,查看原文内容请购买。