图形变换的矩阵方法
- 格式:ppt
- 大小:2.75 MB
- 文档页数:90
复杂图形变换步骤及方法解析结合缩放矩阵和其他矩阵实现更复杂的图形变换是计算机图形学中的一项重要技术。
这种技术通常涉及多个变换矩阵的级联(即矩阵乘法),以同时实现缩放、旋转、平移等多种变换效果。
以下是如何结合缩放矩阵和其他矩阵实现更复杂图形变换的步骤和方法:一、理解基本变换矩阵首先,需要理解并掌握基本的变换矩阵,包括缩放矩阵、旋转矩阵和平移矩阵。
●●[cosθsinθ0−sinθcosθ0 001]●二、确定变换顺序由于矩阵乘法不满足交换律,因此变换的顺序很重要。
通常的变换顺序是先缩放、再旋转、最后平移,但这并不是绝对的,具体取决于所需的变换效果。
三、构建组合变换矩阵将缩放矩阵、旋转矩阵和平移矩阵按照确定的顺序相乘,得到组合变换矩阵。
这个矩阵将同时包含缩放、旋转和平移三种变换的效果。
四、应用组合变换矩阵将组合变换矩阵与表示图形顶点的齐次坐标相乘,得到变换后的新坐标。
这一步骤通常是在图形渲染管线的顶点着色器阶段完成的。
五、示例假设有一个二维图形,需要将其先缩放2倍(在x和y方向上),然后绕原点旋转45度,最后沿x轴平移10个单位。
可以按照以下步骤构建组合变换矩阵并应用它:1.S=[200 020 001]2.3.T=[1010 010 001]4.M=T∙R∙S5.应用组合变换矩阵:将M与图形的顶点坐标相乘,得到变换后的新坐标。
六、注意事项●变换顺序对结果有影响,应根据实际需求确定。
●在进行组合变换时,应确保变换矩阵的维度匹配。
●在实际应用中,可能还需要考虑图形的中心点或特定点作为变换的基准点,这时可能需要先对图形进行平移以将基准点移动到原点,再进行缩放和旋转,最后平移回原位置。
几何变换矩阵几何变换矩阵是描述二维或三维空间中对图形进行旋转、平移、缩放等操作的数学工具。
在计算机图形学、机器人学、计算机视觉等领域中广泛应用。
下面是几种常见的几何变换矩阵及其作用:1. 平移矩阵平移矩阵描述图形在x、y、z方向上的平移,记作T=[1 0 0 tx; 0 1 0 ty;0 0 1 tz; 0 0 0 1],其中tx、ty、tz为平移的距离,可以是正数、负数或零。
该矩阵作用于二维图形时只需取前两行两列即可。
2. 旋转矩阵旋转矩阵描述图形绕x、y、z轴旋转的角度,记作Rx(θ)=[1 0 0 0; 0 cosθ -sinθ 0; 0 sinθ cosθ 0; 0 0 0 1]、Ry(θ)=[cosθ 0 sinθ 0; 0 1 0 0; -sinθ 0 cosθ 0; 0 0 0 1]、Rz(θ)=[cosθ -sinθ 0 0; sinθ cosθ 0 0; 0 0 1 0; 0 0 0 1],其中θ为旋转的角度,可以是正数或负数。
3. 缩放矩阵缩放矩阵描述图形在x、y、z方向上的缩放比例,记作S=[sx 0 0 0; 0 sy 0 0; 0 0 sz 0; 0 0 0 1],其中sx、sy、sz为在x、y、z方向上的缩放比例,可以是大于1的正数、小于1的正数或等于1。
4. 复合矩阵复合矩阵是多个几何变换矩阵的乘积,可以将多个变换操作合并为一个操作。
例如,将平移、旋转和缩放操作合并为一个复合矩阵,记作M=T*R*S,其中T为平移矩阵,R为旋转矩阵,S为缩放矩阵。
几何变换矩阵在计算机图形学中具有广泛的应用,在3D建模、角色动画、特效制作等方面均有涉及。
同时,它也为机器人学、计算机视觉等领域的研究提供了重要的数学基础。
在实际应用中,我们可以根据具体的需求选择不同的变换矩阵进行操作,以达到预期的效果。
平移变换的矩阵表示平移变换是计算机图形学中常用的一种基本的图形变换方式,它可以沿着指定的方向将图形的位置整体移动到新的位置上。
在二维平面上,平移变换可以通过矩阵来表示并实现。
在进行平移变换时,我们需要考虑一个重要的因素,即平移的方向和距离。
平移变换是一种向量平移,其中平移向量指定了平移的方向和距离。
在二维平面上,平移可以沿着x轴和y轴进行。
因此,我们可以使用二维矩阵来表示平移变换。
设平移向量为(Tx, Ty),其中Tx表示在x轴上平移的距离,Ty表示在y轴上平移的距离。
为了将平移表示为一个矩阵运算,我们可以使用一个3x3的矩阵来表示平移变换,该矩阵如下所示:```[1 0 Tx][0 1 Ty][0 0 1 ]```在矩阵中,第一行表示x轴方向的平移,第二行表示y轴方向的平移,第三行始终保持不变,分别表示着世界坐标系的x、y和z轴。
接下来,我们来看一个具体的例子,假设有一个点p(x, y),我们想将该点沿x轴方向平移5个单位,沿y轴方向平移3个单位。
通过平移矩阵和点的坐标相乘的方式,可以将点p进行平移变换:```[1 0 5] [x] [x+5][0 1 3] × [y] = [y+3][0 0 1] [1] [ 1]```在上述例子中,我们可以看到,点的坐标分别增加了5和3,达到了平移的效果。
需要注意的是,在执行矩阵乘法时,矩阵的每一行与点的坐标进行相乘后求和,得到新的坐标值。
最后得到的结果为点进行平移变换后的坐标。
平移变换的矩阵表示可以方便地与其他变换如旋转、缩放等进行组合操作,并且能够通过一次矩阵运算实现多个点的平移。
因此,平移变换的矩阵表示在计算机图形学中具有重要的应用价值。
总结起来,平移变换是一种常用的图形变换方式,通过矩阵运算可以方便地表示和实现。
平移变换的矩阵表示采用3x3的矩阵形式,其中平移向量指定了平移的方向和距离。
通过将平移矩阵与点的坐标相乘,可以实现对点进行平移变换。
三维几何变换矩阵-回复什么是三维几何变换矩阵?怎样表示一个三维几何变换矩阵?这些矩阵有哪些性质?在三维图形的空间变换中,如何使用这些矩阵来实现平移、旋转、缩放和剪切等操作?本文将一步一步回答这些问题。
首先,我们来介绍一下三维几何变换矩阵。
在三维空间中,几何变换是指对点、线、面等进行平移、旋转、缩放、剪切等操作的数学表示。
而三维几何变换矩阵是用来表示这些变换操作的一种工具。
它由一个3×3的旋转矩阵和一个3×1的平移向量组成。
接下来,我们来看一下如何表示一个三维几何变换矩阵。
一般来说,一个三维几何变换矩阵可以写成如下的形式:[T] = [R T][0 1]其中,[R]是一个3×3的旋转矩阵,[T]是一个3×1的平移向量,表示矩阵的分割线,0和1是分别表示的3×1的零向量和1这两个数。
这种表示方法被称为仿射变换矩阵。
这样的表示方法非常直观,便于对变换进行组合和计算。
接下来,我们来看一下三维几何变换矩阵的性质。
首先,几何变换矩阵是可逆的,即可以通过逆矩阵将一个变换恢复到原来的状态。
其次,变换矩阵的乘法满足结合律,即[T1][T2][T3]=[T1T2][T3]。
此外,变换矩阵的乘法顺序也影响着变换的结果。
例如,平移变换的矩阵和旋转变换的矩阵乘积的结果与旋转变换的矩阵和平移变换的矩阵乘积的结果是不同的。
在三维图形的空间变换中,我们经常需要用到平移、旋转、缩放和剪切等操作。
下面,我们来分别介绍这些操作在三维几何变换矩阵中的表示方法。
首先是平移操作。
平移是指将一个点或物体沿着指定的方向按照指定的距离移动。
在三维几何变换矩阵中,平移操作可以通过平移向量来表示。
假设平移向量为(Tx, Ty, Tz),则平移变换矩阵可以表示为:[T] = [1 0 0 Tx][0 1 0 Ty][0 0 1 Tz][0 0 0 1]其中,Tx、Ty和Tz分别表示在x、y和z轴上的平移距离。
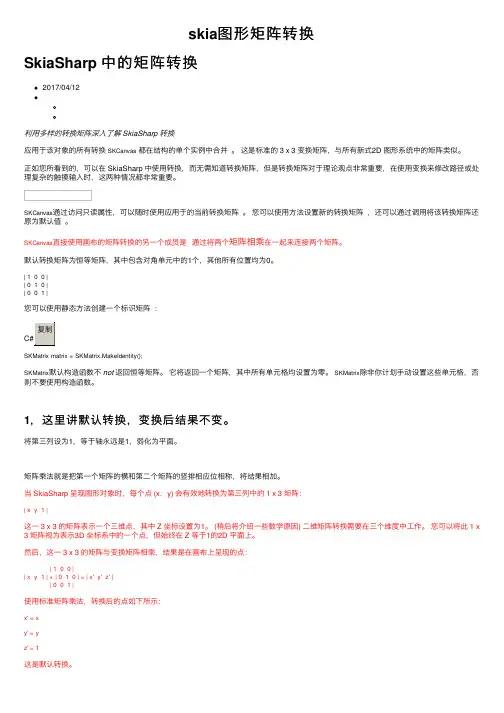
skia图形矩阵转换SkiaSharp 中的矩阵转换2017/04/12利⽤多样的转换矩阵深⼊了解 SkiaSharp 转换应⽤于该对象的所有转换SKCanvas都在结构的单个实例中合并。
这是标准的 3 x 3 变换矩阵,与所有新式2D 图形系统中的矩阵类似。
正如您所看到的,可以在 SkiaSharp 中使⽤转换,⽽⽆需知道转换矩阵,但是转换矩阵对于理论观点⾮常重要,在使⽤变换来修改路径或处理复杂的触摸输⼊时,这两种情况都⾮常重要。
SKCanvas通过访问只读属性,可以随时使⽤应⽤于的当前转换矩阵。
您可以使⽤⽅法设置新的转换矩阵,还可以通过调⽤将该转换矩阵还原为默认值。
SKCanvas直接使⽤画布的矩阵转换的另⼀个成员是通过将两个矩阵相乘在⼀起来连接两个矩阵。
默认转换矩阵为恒等矩阵,其中包含对⾓单元中的1个,其他所有位置均为0。
| 1 0 0 || 0 1 0 || 0 0 1 |您可以使⽤静态⽅法创建⼀个标识矩阵:SKMatrix matrix = SKMatrix.MakeIdentity();SKMatrix默认构造函数不not返回恒等矩阵。
它将返回⼀个矩阵,其中所有单元格均设置为零。
SKMatrix除⾮你计划⼿动设置这些单元格,否则不要使⽤构造函数。
1,这⾥讲默认转换,变换后结果不变。
将第三列设为1,等于轴永远是1,弱化为平⾯。
矩阵乘法就是把第⼀个矩阵的横和第⼆个矩阵的竖排相应位相称,将结果相加。
当 SkiaSharp 呈现图形对象时,每个点 (x,y) 会有效地转换为第三列中的 1 x 3 矩阵:| x y 1 |这⼀ 3 x 3 的矩阵表⽰⼀个三维点,其中 Z 坐标设置为1。
(稍后将介绍⼀些数学原因) ⼆维矩阵转换需要在三个维度中⼯作。
您可以将此 1 x 3 矩阵视为表⽰3D 坐标系中的⼀个点,但始终在 Z 等于1的2D 平⾯上。
然后,这⼀ 3 x 3 的矩阵与变换矩阵相乘,结果是在画布上呈现的点:| 1 0 0 || x y 1 | × | 0 1 0 | = | x' y' z' || 0 0 1 |使⽤标准矩阵乘法,转换后的点如下所⽰:x' = xy' = yz' = 1这是默认转换。

图形变换(转)主要内容:图形处理是CAD/CAM中的关键技术,包括图形⽣成、编辑和图形变换。
计算机图形学计算机图形学的概念计算机图形学的研究内容图形变换点的变换⼆维图形的变换⼆维图形的齐次变换⼆维图形的基本变换复合变换三维图形的齐次变换三维图形的基本变换复合变换1、什么是计算机图形学计算机图形学(Computer Graphics)是近30年来发展迅速、应⽤⼴泛的新兴学科,是计算机科学最活跃的分⽀之⼀。
计算机图形学是研究在计算机中如何表⽰图形,以及利⽤计算机进⾏图形的计算、处理和显⽰的相关原理与算法的⼀门学科。
随着计算机技术的发展,计算机图形学在CAD/CAM等计算机应⽤领域中占有越来越重要的地位。
计算机图形学的研究内容是⼗分丰富的。
虽然许多研究⼯作已经进⾏了多年,取得了不少成果,但随着计算机技术的进步和图形显⽰技术应⽤领域的扩⼤和深⼊,计算机图形学的研究、开发与应⽤还将得到进⼀步的发展。
2、图形变换的概念根据需要将已定义的图形从屏幕的某⼀位置移动到另⼀位置,或改变图形的⼤⼩和形状或利⽤已有的图形⽣成复杂的图形,这种图形处理的⽅法称为图形的⼏何变换,简称图形变换。
图形变换是计算机图形学的核⼼基础,通过图形变换,能够很⽅便地由简单图形派⽣出所需要的图形。
图形变换主要包括⼆维图形和三维图形的⼏何变换,投影变换等。
图形变换通常采⽤矩阵变换的⽅法,图形变换不同,其变换矩阵也不同,本节将重点介绍图形变换的矩阵⽅法及图形变换的程序设计。
2.1 点的变换在计算机绘图中,常常要进⾏诸如⽐例、对称、旋转、平移、投影等各种变换,图形可以⽤点集来表⽰,也就是点集定了,图形也就确定了。
如果点的位置变了,图形也就随之改变。
因此,要对图形进⾏变换,只要变换点就可以了。
由于点集可以⽤矩阵的⽅法来表达,因此对点的变换可以通过相应的矩阵运算来实现,即旧点(集)×变换矩阵矩阵运算新点(集)。
2.2 ⼆维图形变换⼆维图形变换主要包括⽐例,对称、错切、旋转、平移等。
三维平面变换矩阵在计算机图形学和计算机视觉领域,三维平面变换矩阵是一种重要的数学工具,用于描述和实现对三维空间中的点、向量和图形对象的变换操作。
它可以表示平移、旋转、缩放和投影等几何变换,是实现三维图形渲染和视觉效果的基础。
一、平移变换矩阵平移变换是将点或对象沿固定方向移动一定距离的操作。
在三维空间中,平移变换可以用一个4x4的矩阵表示。
该矩阵的主对角线上的元素为1,其余元素为0,其中第四列分别表示在x、y、z方向上的平移距离。
通过乘法运算,可以将一个点或对象的坐标进行平移。
二、旋转变换矩阵旋转变换是围绕某一中心点按照一定角度进行旋转的操作。
在三维空间中,旋转变换可以用一个4x4的矩阵表示。
该矩阵的前三列分别表示x、y、z轴上的旋转向量,通过正交矩阵的乘法运算,可以实现对三维点或对象的旋转变换。
三、缩放变换矩阵缩放变换是按照一定比例改变三维点或对象的大小的操作。
在三维空间中,缩放变换可以用一个4x4的矩阵表示。
该矩阵的对角线上的元素分别表示在x、y、z轴上的缩放比例,其余元素为0。
通过乘法运算,可以实现对三维点或对象的缩放变换。
四、投影变换矩阵投影变换是将三维空间中的点或对象映射到二维平面上的操作。
在计算机图形学中,常用的投影变换有透视投影和正交投影。
透视投影是模拟人眼观察物体时的效果,而正交投影则保持物体在投影平面上的尺寸不变。
透视投影变换可以用一个4x4的矩阵表示。
该矩阵的元素根据透视投影的参数计算得到,通过乘法运算,可以将三维点或对象映射到二维平面上。
正交投影变换也可以用一个4x4的矩阵表示。
该矩阵的对角线上的元素为1,其余元素为0,通过乘法运算,可以将三维点或对象投影到二维平面上。
五、复合变换矩阵在实际应用中,常常需要对三维点或对象进行多种变换操作的组合。
这时可以将各种变换的矩阵相乘,得到一个综合的变换矩阵。
通过将综合变换矩阵与三维点或对象进行乘法运算,可以实现多种变换的组合效果。
六、应用三维平面变换矩阵在计算机图形学和计算机视觉领域有着广泛的应用。
矩阵变换练习题掌握矩阵变换的方法和应用矩阵变换练习题:掌握矩阵变换的方法和应用矩阵变换是线性代数中的重要内容,广泛应用于图形学、计算机视觉以及物理学等领域。
通过矩阵变换,我们可以对图形进行平移、旋转、缩放等操作,从而实现各种有趣的效果。
本文将介绍一些矩阵变换的基本方法和应用,并提供练习题来帮助读者加深理解与掌握。
一、平移变换平移变换是将图形沿着指定的方向进行移动的一种变换方法。
为了实现平移,我们可以使用二维或三维的平移矩阵。
对于二维情况下的平移变换,平移矩阵可以表示为:\[\begin{bmatrix} 1 & 0 & t_x \\ 0 & 1 & t_y \\ 0 & 0 & 1\end{bmatrix}\]其中,\(t_x\)和\(t_y\)分别表示在x轴和y轴上的平移距离。
对于三维情况下的平移变换,平移矩阵可以表示为:\[\begin{bmatrix} 1 & 0 & 0 & t_x \\ 0 & 1 & 0 & t_y \\ 0 & 0 & 1 & t_z \\ 0 & 0 & 0 & 1 \end{bmatrix}\]其中,\(t_x\)、\(t_y\)和\(t_z\)分别表示在x轴、y轴和z轴上的平移距离。
通过将图形的顶点坐标与平移矩阵相乘,即可实现平移变换。
练习题一:已知二维图形A的顶点坐标为(2, 3),应用平移变换使得A沿x轴正方向平移4个单位,沿y轴正方向平移5个单位。
请计算平移后A的顶点坐标。
练习题二:已知三维图形B的顶点坐标为(1, 2, 3),应用平移变换使得B沿x轴负方向平移2个单位,沿y轴负方向平移3个单位,沿z轴正方向平移1个单位。
请计算平移后B的顶点坐标。
二、旋转变换旋转变换是将图形绕指定点或指定轴进行旋转的一种变换方法。
在三维空间中,我们经常会遇到需要进行旋转变换的场景。
在计算机图形学、机器人学、物体运动学等领域中,对于三维物体的旋转变换矩阵的计算是非常重要的。
在本文中,我们将深入探讨绕任意向量的三维旋转变换矩阵的计算方法,为读者提供一个清晰的解释和示范。
二、基本概念1. 旋转矩阵旋转矩阵是一个正交矩阵,它能够描述在三维空间中物体绕某一点或某一轴进行旋转的变换。
在三维空间中,任意的旋转都可以通过一个旋转矩阵来表示。
2. 绕任意向量的旋转通常情况下,我们接触到的旋转变换都是绕坐标轴进行的。
然而,在实际问题中,很多情况下我们需要对物体绕一个任意给定的向量进行旋转变换。
这就需要我们计算绕任意向量的旋转变换矩阵。
三、绕任意向量的旋转变换矩阵1. 罗德里格斯旋转公式罗德里格斯旋转公式是计算绕任意向量的旋转变换矩阵的经典方法之一。
它的基本思想是通过将任意向量的旋转变换分解为绕坐标轴的旋转变换来进行计算。
四元数是另一种在计算绕任意向量的旋转变换矩阵中经常使用的方法。
它的优势在于能够简洁地表示旋转变换,并且适合在计算机图形学等领域中使用。
3. 具体计算方法我们将对罗德里格斯旋转公式和四元数两种方法分别进行详细的介绍和演示,包括具体的计算步骤和样例代码,以便读者能够更好地理解和掌握这两种方法。
四、原理分析1. 罗德里格斯旋转公式的推导我们将通过对罗德里格斯旋转公式的推导过程进行分析,来揭示它背后的原理,以及为什么能够用来计算任意向量的旋转变换矩阵。
2. 四元数的数学性质四元数作为一种数学工具,在计算绕任意向量的旋转变换矩阵时,其数学性质对于理解和应用都非常重要。
我们将对四元数的性质进行深入剖析。
五、实际应用1. 计算机图形学在计算机图形学中,对三维物体进行旋转变换是非常常见的操作。
通过本文介绍的方法,读者可以更好地理解和应用在实际的图形渲染中。
2. 机器人学在机器人学中,对机器人的姿态进行控制是一个重要的问题。
计算绕任意向量的旋转变换矩阵可以帮助机器人实现复杂的动作。
第六章 三维图形变换第一节 三维图形变换基础一、三维坐标系xyzxyz右手坐标系左手坐标系三维图形学中习惯上通常是采用右手坐标系。
xy 平面对应于视平面,z 轴垂直于视平面,指向视平面之外。
二、三维齐次坐标及变换矩阵三维图形变换也是基于矩阵运算进行。
矩阵运算的维数被扩展为四维。
三维坐标点采用4元齐次坐标表示:(x , y , z , 1),三维坐标与三维齐次坐标的相互转换如下:三维坐标(x , y ,z )——齐次坐标(x , y ,z , 1) 齐次坐标(x , y ,z , h )——二维坐标(x /h , y /h ,z /h ) 变换矩阵则为4X4的矩阵:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡s nm kr j i h q f e d p c b a 其中:平移变换第二节 三维几何变换一、三维基本变换 1. 平移变换⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=1010000100001nmk T )1,,,()1,,,(n z m y k x T z y x +++=⋅2. 比例变换)1,,,()1,,,(1000000000000jz ey ax T z y x j e a T =⋅⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡= 3. 旋转变换三维的基本旋转变换分为三种,即绕三个坐标轴的旋转变换。
(1)绕z 轴旋转γ角旋转后z 值不变,x,y 值将发生改变,x,y 值的计算公式与平面旋转相同,即:zz y x y y x x ='+='-='γγγγcos sin sin cos 则变换矩阵为:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=1000010000cos sin 00sin cos γγγγT 有:)1,1,cos sin ,sin cos ()1,,,(γγγγy x y x z y x +-=T(2)绕x 轴旋转α角则旋转后x 的坐标值不变,y 和z 的坐标值将改变,相当于在yz 平面上绕平面原点进行旋转变换。
平面转转变换的公式为:ααααcos sin sin cos y x y y x x +='-='对应而来,这里y 对应于x ,z 对应y ,有:ααααcos sin sin cos z y z z y y +='-='则变换矩阵为:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=10000cos sin 00sin cos 00001ααααT )1,cos sin ,sin cos ,()1,,,(ααααz y z y x z y x +-=T(3)绕y 轴旋转β角这时,z 对应于x ,x 对应于y 。