信号检测计算题
- 格式:doc
- 大小:87.50 KB
- 文档页数:3
信号检测期末考试题及答案(注意:以下为示例文章,实际文章内容可能与示例不同)一、选择题1. 在信号检测理论中,常用的两个假设是什么?答案:零假设和备择假设。
2. 什么是误警概率?答案:误警概率是指当零假设成立时,拒绝零假设的概率。
3. 什么是检测概率?答案:检测概率是指当备择假设成立时,正确拒绝零假设的概率。
4. 什么是检测效能?答案:检测效能是指检测系统能够正确检测到信号的能力。
5. 什么是最大似然检测准则?答案:最大似然检测准则是在已知观测信号的条件下,选择使似然函数值最大的假设作为最终决策。
二、填空题1. 当备择假设为H1: X ~ N(1, 1),零假设为H0: X ~ N(0, 1)时,应该使用的检测准则是________。
答案:N-P检测准则。
2. 假设信号的功率为P1,背景噪声功率为P0,最佳检测准则为最小概率误警准则,则检测阈值应选择为________。
答案:关于噪声功率和信噪比的函数。
3. 当观测信号满足高斯分布时,最佳检测准则为________。
答案:最大似然检测准则。
4. 当信号为常值时,信号出现的概率密度函数为________。
答案:冲激函数。
5. 信号与噪声统计独立且噪声功率已知时,最佳检测准则为________。
答案:能量检测准则。
三、计算题1. 当信噪比为10dB,信号的功率为1W,背景噪声的功率为0.1W 时,计算最佳检测准则的检测门限值。
答案:根据最小概率误警准则公式,检测门限值等于背景噪声功率乘以一个与信噪比和常数有关的函数,根据给定的数值计算得到检测门限值为0.3162。
2. 在一个二元信号检测系统中,假设信号和噪声均服从高斯分布,且功率相等。
当信号出现的概率为0.9时,计算最佳检测准则的检测门限值。
答案:根据最大似然检测准则,将假设信号出现和噪声出现的概率代入似然函数,对似然函数取对数,最后得到检测门限值为0.2553。
四、简答题1. 请简述最小概率误警准则和最大概率检测准则的基本原理。
测试技术与信号处理题库第⼀章习题测试信号的描述与分析⼀、选择题1.描述周期信号的数学⼯具是()。
A.相关函数B.傅⽒级数C. 傅⽒变换D.拉⽒变换2. 傅⽒级数中的各项系数是表⽰各谐波分量的()。
A.相位B.周期C.振幅D.频率3.复杂的信号的周期频谱是()。
A .离散的 B.连续的 C.δ函数 D.sinc 函数4.如果⼀个信号的频谱是离散的。
则该信号的频率成分是()。
A.有限的B.⽆限的C.可能是有限的,也可能是⽆限的5.下列函数表达式中,()是周期信号。
A. 5cos10()0x t ππ ≥?= ? ≤?当t 0当t 0B.()5sin 2010cos10)x t t t t ππ=+ (-∞<<+∞C .()20cos20()at x t e t t π-= -∞<<+∞6.多种信号之和的频谱是()。
A. 离散的B.连续的C.随机性的D.周期性的7.描述⾮周期信号的数学⼯具是()。
A.三⾓函数B.拉⽒变换C.傅⽒变换D.傅⽒级数8.下列信号中,()信号的频谱是连续的。
A.12()sin()sin(3)x t A t B t ω?ω?=+++B.()5sin 303sin50x t t t =+ C.0()sin at x t e t ω-=?9.连续⾮周期信号的频谱是()。
A.离散、周期的B.离散、⾮周期的C.连续⾮周期的D.连续周期的10.时域信号,当持续时间延长时,则频域中的⾼频成分()。
A.不变B.增加C.减少D.变化不定11.将时域信号进⾏时移,则频域信号将会()。
A.扩展B.压缩C.不变D.仅有移相12.已知 ()12sin ,()x t t t ωδ=为单位脉冲函数,则积分()()2x t t dt πδω∞-∞?-的函数值为()。
A .6 B.0 C.12 D.任意值13.如果信号分析设备的通频带⽐磁带记录下的信号频带窄,将磁带记录仪的重放速度(),则也可以满⾜分析要求。
一、概念:1. 匹配滤波器。
概念:所谓匹配滤波器是指输出判决时刻信噪比最大的最佳线性滤波器。
应用:在数字信号检测和雷达信号的检测中具有特别重要的意义。
在输出信噪比最大准则下设计一个线性滤波器是具有实际意义的。
2. 卡尔曼滤波工作原理及其基本公式(百度百科)首先,我们先要引入一个离散控制过程的系统。
该系统可用一个线性随机微分方程(Linear StochasticDifference equation)来描述:X(k)=A X(k-1)+BU(k)+W(k)再加上系统的测量值:Z(k)=HX(k)+V(k)上两式子中,X(k)是k时刻的系统状态,U(k)是k时刻对系统的控制量。
A和B是系统参数,对于多模型系统,他们为矩阵。
Z(k)是k时刻的测量值,H是测量系统的参数,对于多测量系统,H为矩阵。
W(k)和V(k)分别表示过程和测量的噪声。
他们被假设成高斯白噪声(White GaussianNoise),他们的covariance分别是Q,R(这里我们假设他们不随系统状态变化而变化)。
对于满足上面的条件(线性随机微分系统,过程和测量都是高斯白噪声),卡尔曼滤波器是最优的信息处理器。
下面我们来用他们结合他们的covariances来估算系统的最优化输出(类似上一节那个温度的例子)。
首先我们要利用系统的过程模型,来预测下一状态的系统。
假设现在的系统状态是k,根据系统的模型,可以基于系统的上一状态而预测出现在状态:X(k|k-1)=A X(k-1|k-1)+B U(k) ………..(1)式(1)中,X(k|k-1)是利用上一状态预测的结果,X(k-1|k-1)是上一状态最优的结果,U(k)为现在状态的控制量,如果没有控制量,它可以为0。
到现在为止,我们的系统结果已经更新了,可是,对应于X(k|k-1)的covariance还没更新。
我们用P表示covariance:P(k|k-1)=A P(k-1|k-1)A’+Q (2)式(2)中,P(k|k-1)是X(k|k-1)对应的covariance,P(k-1|k-1)是X(k-1|k-1)对应的covariance,A’表示A的转置矩阵,Q是系统过程的covariance。
信号检测期末考试题及答案一、选择题(每题2分,共20分)1. 在信号检测理论中,信号检测的两个主要参数是:A. 信号强度和噪声大小B. 信号频率和信号幅度C. 信号到噪声比和信号的信噪比D. 信号的信噪比和信号的频率带宽2. 信号检测中的ROC曲线表示的是:A. 信号的频率响应曲线B. 信号的幅度响应曲线C. 接收者操作特征曲线D. 信号的时域特性曲线3. 信号检测理论中,d'值表示的是:A. 信号的信噪比B. 信号的幅度C. 信号的频率D. 信号与噪声的区分能力4. 以下哪个不是信号检测理论中常用的指标:A. 灵敏度B. 特异性C. 准确率D. 信噪比5. 信号检测理论中的β错误是指:A. 漏检B. 误报C. 假阳性D. 假阴性...(此处省略剩余选择题)二、简答题(每题10分,共30分)1. 简述信号检测理论中的信号到噪声比(SNR)的概念及其重要性。
2. 解释ROC曲线在信号检测中的应用及其优势。
3. 什么是d'值?它在信号检测中的作用是什么?三、计算题(每题15分,共30分)1. 假设一个信号检测系统接收到的信号强度为10,噪声强度为5,请计算该系统的信号到噪声比(SNR)。
2. 给定一个信号检测系统的ROC曲线数据,计算其d'值和β错误。
四、论述题(每题20分,共20分)1. 论述信号检测理论在实际工程中的应用及其重要性。
答案一、选择题1. D2. C3. D4. D5. A...(此处省略剩余选择题答案)二、简答题1. 信号到噪声比(SNR)是信号检测理论中衡量信号在噪声中可检测性的一个重要参数。
它表示信号强度与背景噪声强度的比值。
高SNR意味着信号更容易被检测和识别,而低SNR则意味着信号可能被噪声淹没,难以检测。
2. ROC曲线是接收者操作特征曲线的简称,它用于描述信号检测系统的性能。
通过绘制不同阈值下系统的正确检测率(真阳性率)与错误检测率(假阳性率)的关系,ROC曲线可以直观地展示系统在不同灵敏度水平下的表现。
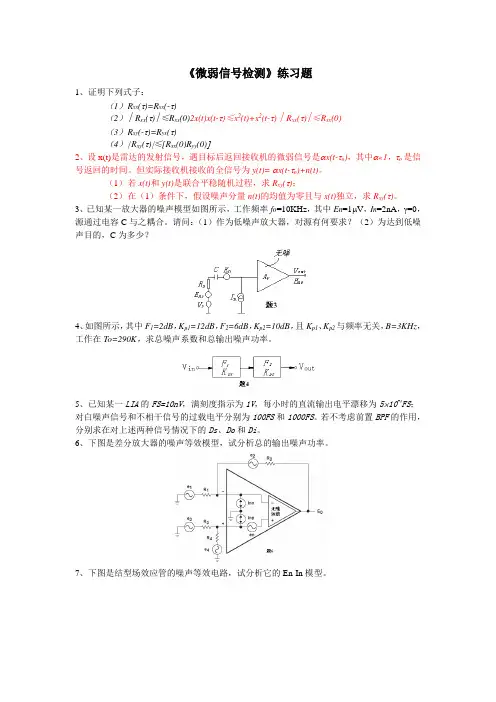
《微弱信号检测》练习题1、证明下列式子:(1)R xx(τ)=R xx(-τ)(2)∣ R xx(τ)∣≤R xx(0)2x(t)x(t-τ)≤x2(t)+x2(t-τ)∣ R xx(τ)∣≤R xx(0)(3)R xy(-τ)=R yx(τ)(4)| R xy(τ)|≤[R xx(0)R yy(0)]2、设x(t)是雷达的发射信号,遇目标后返回接收机的微弱信号是αx(t-τo),其中α«1,τo是信号返回的时间。
但实际接收机接收的全信号为y(t)= αx(t-τo)+n(t)。
(1)若x(t)和y(t)是联合平稳随机过程,求R xy(τ);(2)在(1)条件下,假设噪声分量n(t)的均值为零且与x(t)独立,求R xy(τ)。
3、已知某一放大器的噪声模型如图所示,工作频率f o=10KHz,其中E n=1μV,I n=2nA,γ=0,源通过电容C与之耦合。
请问:(1)作为低噪声放大器,对源有何要求?(2)为达到低噪声目的,C为多少?4、如图所示,其中F1=2dB,K p1=12dB,F2=6dB,K p2=10dB,且K p1、K p2与频率无关,B=3KHz,工作在To=290K,求总噪声系数和总输出噪声功率。
5、已知某一LIA的FS=10nV,满刻度指示为1V,每小时的直流输出电平漂移为5⨯10-4FS;对白噪声信号和不相干信号的过载电平分别为100FS和1000FS。
若不考虑前置BPF的作用,分别求在对上述两种信号情况下的Ds、Do和Di。
6、下图是差分放大器的噪声等效模型,试分析总的输出噪声功率。
7、下图是结型场效应管的噪声等效电路,试分析它的En-In模型。
8、R1和R2为导线电阻,R s为信号源内阻,R G为地线电阻,R i为放大器输入电阻,试分析干扰电压u G在放大器的输入端产生的噪声。
9、如图所示窄带测试系统,工作频率f o=10KHz,放大器噪声模型中的E n=μV,I n=2nA,γ=0,源阻抗中R s=50Ω,C s=5μF。

第二章第一节信号特征检测一、填空题(10)1.常用的滤波器有、低通、带通、四种。
2.加速度传感器,特别是压电式加速度传感器,在及的振动监测与诊断中应用十分广泛。
3.传感器是感受物体运动并将物体的运动转换成的一种灵敏的换能器件。
4.振动传感器主要有、速度传感器、三种。
5.把模拟信号变为数字信号,是由转换器完成的。
它主要包括和两个环节。
6.采样定理的定义是:。
采样时,如果不满足采样定理的条件,会出现频率现象。
7.电气控制电路主要故障类型、、。
8.利用对故障进行诊断,是设备故障诊断方法中最有效、最常用的方法。
9.振动信号频率分析的数学基础是变换;在工程实践中,常运用快速傅里叶变换的原理制成,这是故障诊断的有力工具。
10.设备故障的评定标准常用的有3种判断标准,即、相对判断标准以及类比判断标准。
可用制定相对判断标准。
二、选择题(10)1.()在旋转机械及往复机械的振动监测与诊断中应用最广泛。
A 位移探测器B 速度传感器C 加速度计D 计数器2.当仅需要拾取低频信号时,采用()滤波器。
A 高通B 低通C 带通D 带阻3.()传感器,在旋转机械及往复机械的振动监测与诊断中应用十分广泛。
A 压电式加速度B 位移传感器C 速度传感器D 以上都不对4.数据采集、谱分析、数据分析、动平衡等操作可用()实现。
A 传感器B 数据采集器C 声级计D 滤波器5.()是数据采集器的重要观测组成部分。
A. 滤波器B. 压电式传感器 C 数据采集器 D 数据分析仪6.传感器是感受物体运动并将物体的运动转换成模拟()的一种灵敏的换能器件。
A 力信号B 声信号C 光信号 D. 电信号7.在对()进行电气故障诊断时,传感器应尽可能径向安装在电机的外壳上。
A 单相感应电机B 三相感应电机C 二相感应电机D 四相感应电机8.从理论上讲,转速升高1倍,则不平衡产生的振动幅值增大()倍。
A 1B 2C 3D 49.频谱仪是运用()的原理制成的。

信号检测与估计理论计算机仿真题
1 由M个接收机接收同一入射电磁波,每个接收机接收信号为:
2 通过计算机运用MUSIC、ESPRIT、GEESE等方法进行非相关源的模拟测向并比较各种算法的性能。
3 通过计算机仿真非平稳噪声(噪声协方差矩阵为对角阵,但对角元素值不一样)以及色噪声(噪声协方差矩阵不为对角阵)对MUSIC、ESPRIT、GEESE等方法性能的影响。
注:1 原则上要求独立设计,联合设计最多不超过两人;
2 提交仿真报告(论述清楚主要设计步骤),报告保存为Office word 2003版本;
3 用文件夹打包提交所有仿真程序和仿真报告;
4 文件夹和文件名命名为:学号+姓名.doc(如果两人联合,文件加及文件命名如上,但是文件中必须有合作者学号和姓名);
5 资料提交到ligun@(邮件主题写XXX同学信号检测估计计算机仿真报告,以免被邮件系统过滤为垃圾邮件);
6 报告提交截止日期:2013年11月30日12:00,过期不候;
7 雷同资料一律视为无效。
信号检测论d值计算
信号检测论中D值计算是解决手机信号覆盖范围等问题的重要
环节,也是日常监测中不可缺少的内容。
d值可以有效反映室外覆盖质量,因此在实际工程中,对信号检测论d值的计算以及理解至关重要。
第一,定义信号检测论d值计算。
d值是给定技术参数,在给定网络状态情况下,衡量室外信号到室内的强度差的一个量化指标。
它的计算公式为:D值=10log(1/σ),其中,σ:室外信号到室内的强度比,单位为db。
第二,计算时d值的关键参数。
计算d值时,需要先确定室外信号接收机灵度与室内信号接收机灵度、室内信号接收机S/N比以及室内信号接收机灵度差。
其中室外信号接收机灵度可以从室外接收机获取,室内信号接收机灵度可以从室内接收机获取;室内信号接收机
S/N比可以从接收机上获取;而室内信号接收机灵度差则可以由室内测量结果获取。
第三,d值计算的实例。
假设有室外接收机灵度为-85dBm、室内接收机灵度为-90dBm,室内接收机S/N比为10dB,室内接收机灵度差为-5dBm。
因此,此时根据d值的计算公式,D值计算结果为:D值=10log(1 / (-5/5))=10dBm。
第四,d值的汇总与应用。
在信号检测论中,D值汇总室外信号到室内的强度,可以有效反映覆盖质量,是进行日常监测的重要参数。
此外,D值也是解决手机信号覆盖范围的关键,用于判断手机信号可
以到达的范围,以满足用户的通信需求。
以上就是关于信号检测论d值计算的相关内容,本文介绍了d值的定义及其计算步骤,通过计算d值可以有效汇总室外信号到室内的强度,用于日常监测,解决手机信号范围等问题。
一、是非题(对的打√,错的打×)(每题2分,共20分)1.分析周期信号的频谱的工具是傅立叶级数。
( T )2.所有周期信号都是功率信号。
(√)3.电阻应变式传感器只用于测定结构的应力或应变。
(×)4.瞬态信号的频谱一定是连续的。
( T )5.凡频谱是离散的信号必然是周期信号。
( F )6.信号x(t)=sin(2t+1)+cos(t/3)是瞬态信号。
( F )7.频响函数反映了系统响应的稳态过程。
(√)8.已知信号x(t)与信号y(t)完全不相关,则该二信号的互相关系数满足ρxy(τ)=1( F )9.一阶系统的时间常数τ越小越好。
( T )10.单自由度系统的刚度越大,其固有频率就越低。
( F )11.具有质量为M,刚度为K的振动体的固有频率为 0=MK。
( F )12.传感器与被测量的对应程度可用其灵敏度表示( T )。
13.对传感器进行动态标定的主要目的是检测传感器的动态性能指标( T )。
14.系统的不失真测试条件要求测试系统的幅频特性和相频特性均保持恒定。
( F )15.稳态响应法不能用于一阶系统的动态特性测试。
(×)16.直流信号具有无限的频谱。
(×)17.表示测量装置的静态输入与输出之间关系的实验曲线称为幅频曲线。
( F )18.电桥测量电路的作用是把传感器的参数变化转为电荷的输出。
( F )19.一选频装置,其幅频特性在f1~f2区间急剧衰减(f2>f1),在0~f1和f2~∞之间近乎平直,这叫低通滤波器。
( F )20.半桥联接中要求两个桥臂阻值变化大小相等,极性相反。
(√)21.电桥电路是一个很好的幅度调制器。
( T )22.从信号运算的角度看,调幅过程就是将调制信号与载波信号相乘。
( T )23.相敏检波是一种能鉴别信号的相位和极性却无放大能力的检波电路。
( T )24.压电式传感器不一定要配接前置放大器。
(×)25.电荷放大器使压电加速度计输出的电荷量得到放大,由此而得电荷放大器的名称。
第三章
1、 设在某二元通信系统中,有通信信号和无通信信号的先验概率分别为:P(H 1)=0.8,
P(H 0)=0.2。
若对某观测值x 有条件概率分布f(x|H 1)=0.25和f(x|H 0)=0.45,试用最大后验概率准则对该观测样本x 进行分类。
2、在存在加性噪声的情况下,测量只能为2v 或0v 的直流电压,设噪声服从均值为0、方差为 2
σ的正态分布,设似然比门限值为0l ,试对测量结果进行分类(10分)
3、设二元假设检验的观测信号模型为:
H0:x=-1+n
H1:x=1+n
其中n 是均值为零、方差为1/2的高斯观测噪声。
若两种检验都是等先验概率的,而代价因子为: C 00=1 ,C 10=4, C 11=2 C 01=8。
试求Bayes 判决表示式,并画出bayes 接收机形式。
4、设x1,x2,…xn 是统计独立的方差为2σ的高斯随机变量,在H1假设下均值为a1,H0假设下均值为a0,似然比门限为0l ,试对其进行判决,并求两种错误概率。
(20分)
5、在二元数字通信系统中,时间间隔T 秒内,发送一个幅度为d 的脉冲信号,即s 1=d,代表1;或者不发送信号,即s 0=0,代表0。
加性噪声服从均值为0,方差为1的高斯分布,当先验概率未知,正确判决不花代价,错误判决的代价相等且等于1时,采用极大极小准则计算其极大极小风险为多大,相应的q 0为多少?
6、在加性噪声背景下,测量0V 和1v 的直流电压在P(D1|H0)=0.1的条件下,采用Neyman-Pearson 准则,对一次测量数据进行判决。
假定加性噪声服从均值为0,方差为2的正态分布。
(已知erf(0.9)=0.7969)
第四章 1、已知发送端发送的信号分别为⎩⎨⎧≤≤-=≤≤=T t t A t s T t t A t 0,sin )(0,sin )(s 1
0ωω 试利用最小错误概率准则设计一台接收机,对如下假设做出判决,并画出接收机的结构形式。
⎩⎨⎧+=+=)
()()(:H )()()(:H 1100t n t s t x t n t s t x ,n(t)服从均值为0功率谱密度为N 0/2的高斯白噪声。
2、已知发送端发送的信号分别为⎩⎨⎧≤≤=≤≤=T t t A t s T t t A t 0,2sin )(0,sin )(s 1
0ωω 试利用最小错误概率准则设计一台接收机,对如下假设做出判决,并画出接收机的结构形式。
⎩⎨⎧+=+=)
()()(:H )()()(:H 1100t n t s t x t n t s t x ,n(t)服从均值为0功率谱密度为N 0/2的高斯白噪声。
3、已知发送端发送的信号分别为⎩⎨⎧≤≤=≤≤=T t t A t s T t t 0,sin )(0,0)(s 1
0ω 试利用最小错误概率准则设计一台接收机,对如下假设做出判决,并画出接收机的结构形式。
⎩⎨⎧+=+=)
()()(:H )()()(:H 1100t n t s t x t n t s t x ,n(t)服从均值为0功率谱密度为N 0/2的高斯白噪声。
4、设输入信号⎩⎨⎧≤≤≤≤=T t T t a t s 0,00,
)(
试求该信号的匹配滤波器传输函数、冲激响应、输出信号波形和输出峰值信噪比。
5、设输入信号 试求该信号的匹配滤波器传输函数和输出信号波形。
6、已知输入色噪声的功率谱密度为: 求白化滤波器的传输函数。
7、试证明匹配滤波对波形相同而幅度不同的时延信号具有适应性。
8、试证明匹配滤波器对频移信号不具有适应性。
9、试证明匹配滤波器的幅频特性与输入信号的幅频特性相同,相频特性相反,并附加相位项t -0ω
第七章 序贯检测
1、在二元数字通信系统中,两种假设下的观测信号分别为:
H 1:x i =2+n i
H 0:x i =n i
观测噪声n i 是均值为0,方差为1的高斯噪声,且各次观测统计独立。
已知P( H 0)= P( H 1)=0.5,虚警概率和漏报概率分别为:1.0P ,1.0P m f ====βα。
求:
(1) 序贯似然比检测的判决门限及判决规则。
(10分)
(2) 序贯似然比检测的观测取样数N 的均值。
(5分)
2、在二元假设中,信号的观测模型为:
H 1:x i =s 1i i =1,2,….N
H 0:x i =s 0i i =1,2,….N
s 1i ,s 0i 都是独立同分布的高斯随机变量,均值都是0,方差分别为411202==σσ,。
已知P( H 0)=0.8, P( H 1)=0.2,,虚警概率和漏报概率分别为:1.0P ,2.0P m f ====βα。
求: 序贯似然比检测的判决门限及判决规则。
(10分)
第八章
1、(10分)设观测信号)(),()(t n t s t x +=α,其中n(t)为高斯白噪声,代价函数2^^)(),(αααα-=C
试证明:参量α的bayes 估计量()x E |^
αα=
2、设观测信号)(),()(t n t s t x +=α,其中n(t)为高斯白噪声,代价函数^^),(αααα-=C ⎪⎩⎪⎨⎧≤≤=其它,
020,1)(T t t s 412)(22++=ωωω)(j G n
试证明:参量α的bayes 估计量^α是条件分布的中位数)|(x f α
3、设观测值为T n x x x x ],...,,[21=,x 是均值为a ,方差为2σ的高斯随机变量,求均值a 和
方差2σ的最大似然估计量。
4、已知被估计参量θ的后验概率密度函数为:()0,)()|(f 2≥+=+-θθλθθλx e
x x
求(1)θ的最小均方误差估计量
(2)θ的最大后验估计量 5、根据(0,T)时间内的观测数据x , ),...,2,1(,N i n a x i i =+=其中n i 是均值为零、方差为n 2σ的高斯白噪声,a 为未知的参量。
要求对a 进行估计。
6、根据(0,T)时间内的观测数据x , ),...,2,1(,N i n a x i i =+=其中n i 是均值为零、方差为n 2σ的高斯白噪声,a 为未知的参量。
要求对a 进行估计,并分析其是否具有无偏性、一致性。