推荐-基于单片机的汽车巡航控制系统设计开题报告 精品
- 格式:doc
- 大小:40.50 KB
- 文档页数:6
摘要随着我国汽车工业的迅速发展,汽车的普及面越来越广,与此同时,人们对汽车的安全性和舒适性要求也越来越高。
汽车巡航控制系统可以减轻驾驶员的驾驶疲劳,提高驾车的舒适性,是智能车辆的必备系统,具有重要的研究意义。
本设计分析了国内外汽车巡航控制系统的发展状况和发展方向,介绍了基于MC9S12单片机巡航控制系统的构成和基本原理。
系统选用Freescale l6位单片机MC9S12DG128作为系统控制处理器。
运用该型单片机对电子节气门体的反馈控制进行设计,使节气门与加速踏板之间形成随动关系。
在电子节气门控制的基础上,进一步设计基于MC9S12单片机巡航控制系统,通过车速传感器采集当前的车速信号,与预先设定的速度进行对比计算偏差,运用PID控制方法,调节节气门转过的角度,来改变车速到达设定的车速,使车辆以一恒定的速度行驶,进而完成汽车定速巡航控制系统对速度的闭环控制方案设计。
针对所设计的巡航控制系统,设计系统硬件电路,并在实验室搭建巡航控制模拟平台,对所设计的巡航控制系统进行实验,以验证所设计系统的可行性和稳定性。
关键词:巡航控制;PID控制;MC9S12DG128;电子节气门;定速巡航;单片机ABSTRACTWith the development of our country’s automobile industry,Automobiles are more and more popular,at the same time,the security and the comfort of Automobile should be higher and higher.Automobile curise control system(CCS)can ease The tiredness of driver,and improve the comfort of driving,it is the requisite system of the intelligent vehicles,so the study on CCS is of great importance.The automobile CCS' development and developing trend of CCS are involved in this design,introduced the structure and fundamental principle of the Automobile cruise control system based on MC9S12 single-chip.The system uses Freescale l6-bit microcontrollers MC9812DG128 as system control e this type of single-chip feedback to the electronic air damper control,So that throttle and accelerator pedal with the dynamic relationship.On the basis of electronic throttle control,further design cruise control system based on MC9S12 single-chip,t hrough vehicle speed sensor collects vehicle’s running speed signal,compares with beforehand enactment speed and computes between the speed deviations,using PID control,adjust the angle of turn throttle,to change the speed to set the speed,make the vehicle with a constant speed,to realize the car cruise control system of closed-loop control of the scheme design.Based on the design of cruise control system,design hardware circuit of system,and building cruise control simulation platform in laboratory, the design of cruise control system for experiment,in order to verify the feasibility and stability of the designed system.Key words:Curise control;PID control;MC9S12DG128;Electronic air damper;Constant speed curise;Single-chip目录摘要 (I)Abstract ................................................................................................................................. I I 第1章绪论 .. (1)1.1课题背景 (1)1.2巡航控制系统的发展现状和趋势 (1)1.2.1巡航控制系统的国内外发展状况 (1)1.2.2汽车巡航控制的发展方向 (3)1.3设计的主要内容 (4)第2章基于MC9S12单片机巡航控制系统的总体设计 (5)2.1巡航控制系统概述 (5)2.2巡航控制系统的功能 (5)2.2.1 巡航控制系统的基本功能 (5)2.2.2 巡航控制系统的其他功能 (6)2.3巡航控制系统的组成和原理 (6)2.4巡航控制系统的工作原理 (8)2.5本章小结 (10)第3章巡航控制系统的仿真分析 (11)3.1MATLAB软件的应用 (11)3.1.1 MATLAB的简介 (11)3.1.2 Simulink模块 (11)3.2巡航控制系统控制算法的确定 (12)3.3巡航控制系统仿真 (14)3.3.1 系统仿真模型的建立 (14)3.3.2 系统仿真模型的仿真结果分析 (17)3.4本章小结 (18)第4章巡航控制系统的硬件设计 (19)4.1微控制器的选择 (19)4.2其他辅助芯片介绍及应用 (19)4.2.1 MC9S12DG128最小系统设计 (19)4.2.2 车速传感器选择及安装 (24)4.2.3 开关量的采集 ............................................................... 错误!未定义书签。
毕业设计(论文)开题报告文献综述1 研究目的及意义随着汽车工业和公路运输业的发展,汽车将走进千家万户,驾驶人员非职业化的特点将突出,车辆驾驶的自动化己成为汽车发展的主要趋势[1]。
跨入二十一世纪后,人们需要更加舒适、简便和安全的交通工具,以适应快捷的生活节奏,因此对汽车的智能化要求更加迫切,随着计算机和电子技术的不断发展,性能价格比不断提高,为汽车的优化提供了雄厚的物质基础,汽车实现智能化已不是梦想[2]。
驾驶汽车长途行驶的机会较多,而且在高速公路上行驶时变换车速的频率及范围都较少,能以较稳定的车速行驶。
但若长途驾驶而右脚不得不踩油门踏板时,久而久之驾驶员就会感到疲劳,容易发生交通事故。
车辆自动变速器及其控制技术是智能汽车非常重要的内容,是汽车辅助驾驶系统和自动驾驶系统的基础,是目前我国智能汽车发展亟须解决的核心技术之一。
此外,随着我国高速公路网建设纵横迅速延伸,自动巡航控制也具备了广泛的发展和应用前景[3]。
汽车巡航控制系统CCS(Cruise Control System)是汽车电子技术新装置之一,它实际上就是一种辅助驾驶系统[4]。
汽车定速巡航控制装置的使用减轻了驾驶员操纵强度,减少了不必要的车速变化,提高了驾驶的舒适性和安全性,节省了燃料和降低排放污染,提高发动机的使用效率[5]。
采用汽车巡航控制系统是提高汽车的动力性能和乘坐的舒适性的主要方法之一。
2 汽车定速巡航控制系统的历史背景汽车巡航控制系统发展至今已有四十多年的历史,它经历了机械控制系统、晶体管控制系统、模拟集成电路控制系统和微机控制系统等几个过程[6]。
从总体上来说,国外汽车巡航控制系统的发展大体经历了三个阶段:第一阶段是上世纪50年代末至70年代中期,这一时期美国和日本相继出现了以模拟电路为基础的汽车巡航控制系统。
例如,日本丰田公司从1965年起就开始在车上装用毕业设计(论文)开题报告机械式巡航控制系统。
之后,德国的VDO 公司也研制出了气动机械式巡航控制系统。
基于单片机的毕业设计题目相关开题报告一、研究背景随着科技的快速发展,单片机在电子系统设计中发挥着越来越重要的作用。
单片机因其具有集成度高、功能强大、可靠性高、易于开发等优点,被广泛应用于智能家居、工业控制、医疗设备等领域。
因此,研究基于单片机的应用具有重要意义。
二、研究目的本研究旨在探索单片机在电子系统设计中的应用,以提高系统的性能、可靠性和稳定性。
通过本次研究,希望能够掌握单片机的原理、应用和开发方法,为今后的电子系统设计提供理论和实践支持。
三、研究内容1. 单片机原理及发展历程研究:了解单片机的起源、发展历程、分类及工作原理,为后续的应用研究打下基础。
2. 单片机应用领域研究:分析单片机在智能家居、工业控制、医疗设备等领域的应用现状,为选题提供依据。
3. 单片机开发环境及编程语言研究:熟悉单片机常用的开发环境(如Keil、IAR等)和编程语言(如C语言、汇编语言等),为后续的编程实践做好准备。
4. 具体应用方案设计:根据选题,设计具体的单片机应用方案,包括硬件电路设计和软件编程。
5. 实验与测试:搭建实验平台,对所设计的单片机应用方案进行实验和测试,分析实验结果,优化设计方案。
6. 总结与展望:对本次研究进行总结,指出研究中存在的不足之处,并对未来的研究方向进行展望。
四、预期成果通过本次研究,希望能够达到以下成果:1. 掌握单片机的原理、应用和开发方法;2. 设计出一种基于单片机的电子系统方案;3. 提高自身的实践能力和创新能力;4. 为今后的电子系统设计提供理论和实践支持。
五、研究计划1. 第一阶段(1-2个月):收集资料,了解单片机的原理、发展历程及应用领域;2. 第二阶段(3-4个月):学习单片机开发环境和编程语言,熟悉实验平台和工具;3. 第三阶段(5-6个月):根据选题设计具体应用方案,进行实验和测试;。
基于51单片机的循迹小车系统设计摘要80C51单片机是一款八位单片机,他的易用性和多功能性受到了广大使用者的好评。
在生活中但凡涉及到自动控制的地方都会出现单片机的身影,单片机的应用有利于产品的小型化、智能化,并且能够提高生产效率.这里介绍的是如何用AT89C52单片机来实现小车的循迹功能,该设计是结合科研项目而确定的设计类课题。
本系统以设计题目的要求为目的,采用AT89C52单片机为控制核心,利用红外传感器检测道路上的黑线,控制电动小汽车的自动循迹,快慢速行驶,以及自动停车,并可以自动记录时间、里程和速度,和寻光功能。
整个系统的电路结构非常简单,可靠性能很高。
实验测试结果满足要求,本文着重介绍了该系统的硬件设计方法及测试结果分析。
关键词:80C51单片机;电动小车;pwm调速;光电检测;自动调速系统Car tracking system based on microcontrollerAbstract80C51 is a 8 bit single chip computer。
Its easily using and multi—function suffer large users。
In life,whenever it comes to automatic control of the local microcontroller will appear figure, microcontroller applications in favor of product miniaturization,intelligent,and can improve productivity. Here is how to use AT89C52 microcontroller to achieve the car tracking feature, which is designed to determine the combination of scientific research and design class topic.This system design requirements of the subject for the purpose of using AT89C52 microcontroller core,the use of infrared sensors to detect the black line on the road,the automatic tracking control of electric cars,fast low traffic speeds,as well as automatic parking, and can automatically record time ,mileage and speed, and look for the light function.The circuit structureof the entire system is very simple, very high reliability. The test results meet the requirements,the paper focuses on the hardware design and test results of the system analysis.Keywords:80C51 microcontroller;Electric car Pwm speed; A photodetector;Automatic Speed Control System。
麻省理工学院本科生毕业论文任务书、开题、文献综述和中期检查材料题目:基于51单片机的循迹避障小车的设计学院:电子信息学院专业班级:**************************** 学号:************* 学生姓名:指导教师:目录任务书 0开题报告书 (1)文献综述 (5)中期检查表 (9)任务书*** 同学:经指导教师**** 推荐和毕业论文〔设计〕领导小组审查,你将承当的毕业论文任务为基于51单片机的循迹避障小车的设计。
为确保该课题的顺利开展,请你在承接任务后,严格按照?麻省理工学院本科生毕业论文〔设计〕标准要求?和有关规定,制订科学合理的工作方案,认真实施,并虚心接受指导老师的指导、催促、检查,力争圆满完成你毕业论文〔设计〕任务,到达学士学位论文的各项要求。
电子信息学院2021年10月05日开题报告书文献综述班级姓名学号智能化作为现代社会的新产物,是以后的开展方向,它可以按照预先设定的模式在一个特定的环境里自动的运作,无需人为管理,便可以完成预期所要到达的或是更高的目标。
智能小车,也称轮式机器人,是一种以汽车电子为背景,涵盖控制、模式识别、传感技术、电子、电气、计算机、机械等多科学的科技创意性设计,一般主要路径识别、速度采集、角度控制及车速控制等模块组成。
智能小车运用直流电机对小车进行速度和正反方向的运动控制,运用直流电机对小车进行速度和正反方向的运动控制,通过单片机来控制直流电机的工作,从而实现对整个小车系统的运动控制。
智能小车就是通过传感采集信号,将采集到的信号进行整理,传输给单片机,通过单片机编程控制小车做出智能反响,集合了传感器技术,和自动控制技术[1]。
2.正文智能车辆是集环境感知、规划决策、多等级辅助驾驶等功能于一体的综合系统,是智能交通系统的一个重要组成局部。
它在军事、民用、太空开发等领域有着广泛的应用前景。
本次设计对智能小车的控制系统进行了初步研究,设计实现循迹避障的智能小车控制系统。

基于单片机的汽车巡航控制系统的建模与仿真作者:秦世林黄宇飞刘江东张见广来源:《企业科技与发展》2021年第09期【关键词】单片机;定速巡航;PID控制;燃油经济性【中图分类号】U463.6 【文献标识码】A 【文章编号】1674-0688(2021)09-0037-050 前言汽车巡航控制系统是控制速度稳定的一种辅助驾驶员驾驶车辆的系统。
当驾驶员驾驶车辆时,车速一旦到达设定的巡航系统开启的最低速度后,只需打开巡航开关,再按下巡航速度设定键,汽车将按设定的行驶速度稳定行驶。
若要更改巡航速度,只需按下巡航控制系统的速度调节按钮即可。
此时,驾驶员不需要操控油门踏板,仅通过汽车电子控制单元ECU调控汽车行驶速度,从而减轻驾驶员的精神负担。
随着社会经济的发展,中国进入了小康社会,汽车随着经济的发展逐渐走进人们的生活,或为人们的日常代步工具。
伴随智能交通系统的不断推广,这种能有效减轻驾驶员驾驶汽车的疲劳程度,从而减少因驾驶员失误操作而造成的交通事故的产品在普通家庭轿车上的应用将急剧增长。
对驾驶员来说,该产品提高了汽车的驾驶安全性和燃油经济性;对社会来说,该产品改善了交通状况。
近年来,汽车巡航控制系统得到政府、企业及高级研究机构的广泛关注。
此外,随着我国对于基础建设的重视,以道路交通发展促进我国经济快速发展,我国高速公路四通八达,汽车巡航控制系统具有良好的应用前景。
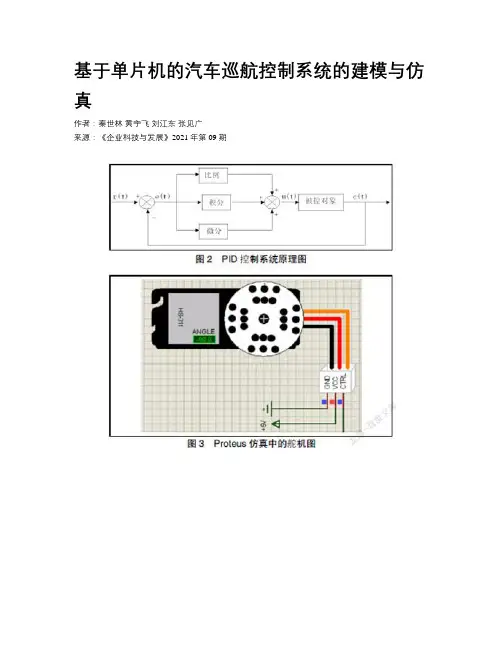
1 汽车巡航控制系统原理及功能1.1 汽车巡航控制系统原理在实体的汽车巡航控制系统中,汽车电子控制单元ECU根据各传感器传来的信号,经过处理后判断路况条件的变化,然后经过计算得到节气门开度的变化量,汽车电子控制单元ECU再控制节气门执行器调节节气门开度,使车辆以恒定速度稳定行驶,汽车巡航控制系统的基本控制原理如图1所示。
1.2 汽车巡航控制系统功能目前,市面上绝大部分的汽车巡航控制系统,主要由电子控制单元ECU、巡航控制开关、车速传感器、节气门执行器等组成[1]。
智能视觉导航小车控制系统设计与研究的开题报告一、研究背景智能机器人技术在各个领域的应用越来越广泛,其中智能视觉导航小车技术作为机器人领域的重要一环,对于各种场所的监控、巡逻等任务有着不可替代的优势。
智能视觉导航小车通过搭载具有视觉识别能力的摄像头等设备,可以自主地感知环境,实现自主导航、避障、环境监测等功能。
智能视觉导航小车的核心是控制系统,其功能包括了摄像头图像采集、图像识别、路径规划、运动控制等。
如何设计一个稳定性高、可靠性好、适应性强的控制系统,是智能视觉导航小车技术的研究热点之一。
二、研究内容和目标本文的研究内容主要包括以下方面:1. 设计基于单片机的视觉控制系统,实现图像采集、图像处理、路径规划、运动控制等功能。
2. 基于深度学习技术,开发图像识别算法,实现对环境中障碍物、人、车辆等对象的识别和定位。
3. 设计合适的传感器,并通过数据采集,对环境中的温度、湿度、气压等参数进行监测和分析。
4. 实现小车的自主导航和避障等功能,并通过外部通信接口,实现对小车的远程控制和监测。
本文的研究目标是设计一个功能完善、稳定性高、适应性强的智能视觉导航小车控制系统,实现对环境中的各种目标的识别和定位,能够自主完成巡逻、监控、运输等任务。
三、研究方法和方案针对本研究的具体内容和目标,本文采用以下研究方法和方案:1. 设计基于ARM Cortex-M系列单片机的嵌入式控制系统,通过串口、SPI、I2C等通信接口,实现对各种传感器、执行机构的控制和数据传输。
2. 基于深度学习技术,采用tensorflow等开源工具,开发图像识别算法,实现对车辆、行人、障碍物等多个目标的识别和定位。
3. 选用高灵敏度、低功耗的传感器,集成温湿度传感器、气压传感器、红外传感器等多种传感器,对环境的各项参数进行实时监测和分析。
4. 配置GPS、蓝牙等通信模块,实现小车的远程监测和控制,结合云平台实现对小车的全面管理。
通过上述研究方法和方案,本文将设计出一款功能完善、适用性强、性能稳定的智能视觉导航小车控制系统。
基于STM32的智能巡航小车学生姓名:齐少华、贾万飞、林学志学号:201340732152013407321820134073220指导教师:丁国超所在学院:信息技术学院专业:电气工程及其自动化目录基于STM32的智能巡航小车 (3)摘要: (3)关键词: (3)前言 (3)一、设计目标背景及意义 (4)二、设计方法 (5)三、设计内容 (8)四、结论 (21)参考文献 (22)任务分工: (23)基于STM32的智能巡航小车摘要:本设计针对智能交通系统,采用STM32F103作为主控芯片.辅以路面检测模块、显示模块等外围器件,构成了一个完整的车载控制系统,路面黑线检测使用反射式红外传感器,利用PWM技术动态控制电动机的转速。
基于这些完备而可靠的硬件设计,使用了一套独特的软件算法,实现了小车在限速和压线过程中的精确控制。
电动小汽车能够根据题目要求在直线方向上完成调速、急刹车、停车、倒车返回等各种运动形式;这辆小车还可以自动记录、显示一次往返时间和行驶距离,并用蜂鸣器提示返回起点。
另外,我们经过MATLAB仿真后,成功地实现了从最高速降至低速的平稳调速。
本系统主要采用模糊控制算法进行速度调节。
通过模糊控制和PWM脉宽调制技术的结合,提高了对车位置控制精度,并且实现了恒速控制。
关键词:STM32F103,智能巡线小车,红外传感器,直流电机,PWM前言智能车辆作为智能交通系统的关键技术之一,是许多高新技术综合集成的载体。
它体现了车辆工程、人工智能、自动控制及计算机技术于一体的综合技术.是未来汽车发展的趋势:巡线是移动机器人的行走控制方法之一,智能巡线小车属于机器人的范畴,它集成机械、电子、计算机控制于一体,在仓库智能管理、高压线路除冰等领域有着广阔的应用前景。
本文提出了一个基于STM32F103芯片为控制核心。
附以红外传感器采集外界信息和检测障碍物的智能小车系统设计方案。
充分利用该芯片高速运算、处理能力,来实现小车自动识别路线按迹行走、躲避障碍物,并且通过LCD显示器实时显示小车运动参数,使用芯片自带的PWM 输出功能.步进调节占空比来调节电机的转速。
基于单片机的自动跟踪车控制系统设计摘要在本文中,我们将介绍一个基于单片机的自动跟踪车控制系统的设计。
该系统能够通过传感器检测到前方障碍物,并自动避让障碍物,同时保持车辆的道路中心线行驶。
该系统采用了ATmega328p单片机作为控制核心,并使用了超声波传感器和红外线传感器实现对车辆周围环境的检测。
我们还通过串口通信将车辆当前状态传输给上位机,以便更好地监控和控制车辆的运动。
关键词:单片机,自动跟踪车,超声波传感器,红外线传感器,串口通信AbstractIn this paper, we will introduce the design of an automatic tracking car control system based on single-chip microcomputer. The system can detect obstacles ahead through sensors and automatically avoid them, while keeping thevehicle on the centerline of the road. The system adopts ATmega328p single-chip microcomputer as the control core, and uses ultrasonic and infrared sensors to detect thesurrounding environment of the vehicle. We also communicatethe current status of the vehicle to the upper computer through serial communication, so as to better monitor and control the movement of the vehicle.Keywords: Single-chip microcomputer, automatic tracking car, ultrasonic sensor, infrared sensor, serial communication1.引言随着自动驾驶技术的不断发展,自动驾驶车辆正逐渐地成为现实。
基于51单片机的自动巡航运输系统设计摘要:随着现代物流行业的迅速发展,越来越多的企业开始关注自动化控制技术在物流领域中的应用。
本文设计了一种基于51单片机的自动巡航运输系统,该系统实现了货物的自动化控制以及可靠的路径规划功能。
通过对该系统进行测试,验证了其可行性和高效性,并说明了其在物流领域中的应用前景。
关键词:自动巡航运输系统,51单片机,物流行业,路径规划Abstract:With the rapid development of modern logistics industry, more and more companies have begun to focus on theapplication of automation control technology in the field of logistics. This paper designs an automatic cruise transportation system based on 51 single-chip microcomputer, which realizes the automation control of goods and reliable path planning function. Through testing the system, the feasibility and efficiency of the system is verified, and its application prospects in the logistics industry are demonstrated.Keywords: automatic cruise transportation system, 51 single-chip microcomputer, logistics industry, path planning 引言:随着全球经济的不断发展,物流行业逐渐成为了一种具有广泛影响的重要产业。
面向ACC的车辆定速巡航控制系统的研究的开题报
告
1. 研究背景:
自动驾驶技术的发展推动了车辆控制技术的不断升级。
其中,面向ACC的车辆定速巡航控制系统是自动驾驶技术的重要组成部分。
因此,
深入研究面向ACC的车辆定速巡航控制系统具有重要的理论和实践意义。
2. 研究目的:
本研究旨在探究面向ACC的车辆定速巡航控制系统的关键技术,研
究如何实现车辆的智能控制和准确的定速巡航,以提高车辆的安全性和
行驶效率。
3. 研究内容:
(1)面向ACC的车辆定速巡航控制系统的原理和技术分析。
(2)基于车辆动态数学模型的ACC控制系统设计。
(3)ACC控制系统的控制算法研究。
(4)ACC控制系统的仿真验证与性能评估。
4. 研究意义:
(1)提高车辆的安全性和行驶效率。
(2)促进自动驾驶技术的发展和应用。
(3)推动车辆控制技术的不断升级和创新。
5. 研究方法:
(1)文献综述法。
(2)数学建模法。
(3)仿真实验法。
6. 预期成果:
(1)完成车辆动态数学模型的建立和ACC控制系统的设计。
(2)实现ACC控制系统的仿真验证和性能评估。
(3)论文发表和学术交流。
7. 研究进度:
目前,已完成面向ACC的车辆定速巡航控制系统的原理和技术分析,正在进行车辆动态数学模型的建立和ACC控制系统的设计。
预计在3个
月内完成仿真实验并对结果进行分析,完成论文写作。