迎宾机器人设计文献综述
- 格式:doc
- 大小:29.54 KB
- 文档页数:4
88
迎宾机器人
摘要:单片机是大规模集成电路技术发展的产物,具有高性能、体积小、价格低廉、稳定可靠的特点。
单片机应用于产品的智能化及过程控制、测控系统等方面。
Intel 公司的MCS 系列为著名的普及型单片机,其控制功能强、成本低廉和软硬件资料丰富。
本次开发的控制对象——迎宾机器人就是利用MCS-51系列的单片机80C51BH 作为核心控制部分,通过扩展外部程序存储器,按照一定的动作要求进行模仿小孩吹肥皂泡,并能播放音乐。
若利用其它语音芯片,也能播出相应的声音如“欢迎”或“早上好”等。
本制作的软硬件都经过了调试,有待于制作电路板和模型。
本制作对进一步开发多功能、趣味性强、智能化的带语音功能产品有一定的借鉴意义。
关键字:单片机;迎宾机器人;模仿
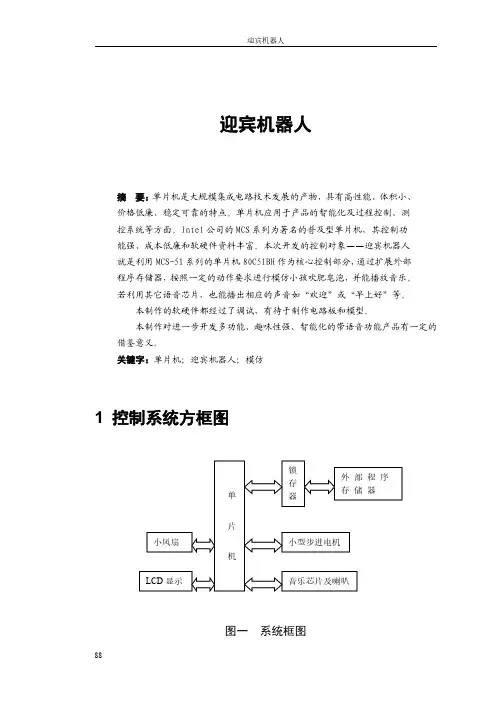
1控制系统方框图
图一系统框图
单
片
机
外部程序存储器
小型步进电机
锁
存器
小风扇
音乐芯片及喇叭LCD 显示
89
2控制流程图
N
Y
N
Y
N
反转,每一步延时0.16S
P3.1=1?
开始
初始化:30H 步数R3眨眼次数31H~32H 不同的延时初值
起动按钮,已按下?
眨眼10次,唱歌约32S
步进电机轴(手臂)
在最低位?
取正转控制标志位F0=0
正转(手臂举起),每一
步延时0.16S
步数走完?
启动风扇,吹泡16S
取反转控制标志位F0=1
反转(手臂放下),每一步延时0.16S
步数走完?
唱歌约32S
Y
N
N
Y N Y
图二控制流程图
90。

CHUANGXINKEJI 2013.04CHUANGXINKEJI 迎宾机器人机械臂机构创新设计及外观设计研究宋文孙传祥(山东大学,山东济南250061)本次设计以山东大学和齐鲁医院的合作命题“迎宾机器人设计”为依托,力图对现有的技术和产品形态进行改良。
在结构设计方面,采用无纸化的作业方式,利用三维实体软件Pro/E 进行结构设计,利用ADAMS 软件进行运动学分析和仿真,并对机器人结构及运动特性进行优化。
在外观设计方面,利用Rhinoceros 三维设计软件对设计进行三维表现,并结合Flash 技术对设计进行动态效果展示。
在这个过程中装配图和零件图相互关联,由粗略到反复细化、符合装配图和相关零件图一致性的要求,大大优化了设计过程。
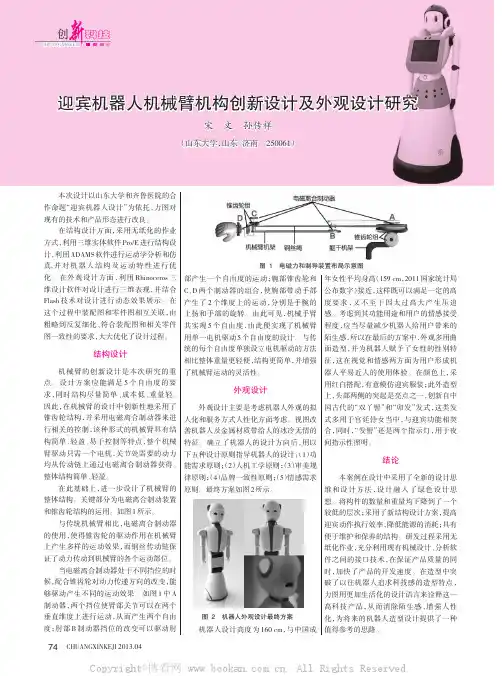
结构设计机械臂的创新设计是本次研究的重点。
设计方案应能满足5个自由度的要求,同时结构尽量简单、成本低、重量轻。
因此,在机械臂的设计中创新性地采用了锥齿轮结构,并采用电磁离合制动器来进行相关的控制,该种形式的机械臂具有结构简单、轻盈、易于控制等特点,整个机械臂驱动只需一个电机,关节处需要的动力均从传动链上通过电磁离合制动器获得。
整体结构简单、轻盈。
在此基础上,进一步设计了机械臂的整体结构。
关键部分为电磁离合制动装置和锥齿轮结构的运用。
如图1所示。
与传统机械臂相比,电磁离合制动器的使用,使得锥齿轮的驱动作用在机械臂上产生多样的运动效果,而钢丝传动链保证了动力传动到机械臂的各个运动部位。
当电磁离合制动器处于不同挡位的时候,配合锥齿轮对动力传递方向的改变,能够驱动产生不同的运动效果。
如图1中A 制动器,两个挡位使臂部关节可以在两个垂直维度上进行运动,从而产生两个自由度;肘部B 制动器挡位的改变可以驱动肘部产生一个自由度的运动;腕部锥齿轮和C 、D 两个制动器的组合,使腕部带动手部产生了2个维度上的运动,分别是手腕的上扬和手部的旋转。
由此可见,机械手臂共实现5个自由度,由此便实现了机械臂用单一电机驱动5个自由度的设计。

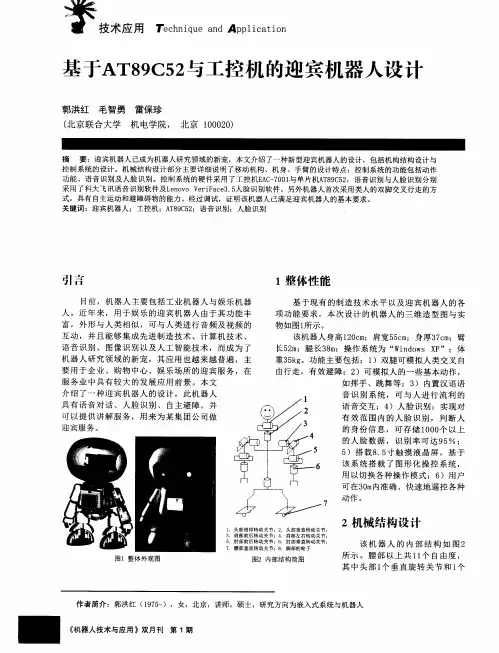
迎宾接待机器人方案1. 引言迎宾接待机器人是一种利用人工智能和机器人技术,能够自动进行接待和服务的智能设备。
它可以在酒店、商场、医院、机场等场所使用,为顾客提供导航、讲解、答疑等服务,能够提升客户体验和工作效率。
本文将介绍一种迎宾接待机器人方案,包括硬件设备和软件系统的设计。
2. 硬件设计2.1 机器人外观设计迎宾接待机器人的外观设计应符合人的审美,同时具备友好和可亲的形象。
可以考虑采用人形机器人或半人形机器人的设计,其中包括头部、身体和手臂等组成部分。
机器人的外观应该有合适的尺寸和比例,便于机器人的自由移动和与人类的互动。
2.2 机器人导航系统机器人导航系统是迎宾接待机器人的核心部件之一。
可以采用激光雷达、摄像头和红外传感器等传感器,配合实时定位与地图构建(SLAM)算法,实现机器人在复杂环境中的自主导航。
机器人应该能够识别障碍物、避免碰撞,并能够准确地到达指定的目的地。
2.3 语音识别和合成系统迎宾接待机器人应该具备语音识别和合成功能,能够理解和回答顾客的问题。
可以采用语音识别算法,将语音信号转化为文本信息,然后通过自然语言处理技术分析问题,并通过语音合成技术回答问题。
机器人的语音应该自然流畅,能够与顾客进行真实的对话。
2.4 视觉系统视觉系统是机器人的重要感知系统之一,可以通过摄像头和图像处理算法实现人脸识别、情感识别和姿态识别等功能。
机器人可以根据顾客的表情和动作来判断顾客的情绪和需求,并做出相应的反应。
视觉系统还可以用于识别地标和导航标志,帮助机器人进行导航和定位。
3. 软件系统设计3.1 语音交互系统语音交互系统是机器人与顾客进行对话的重要组成部分。
可以采用自然语言处理算法,将顾客的语音转化为文本信息,并进行语义解析和意图识别,然后根据意图提供相关的回答和服务。
语音交互系统还可以通过机器学习算法不断学习和优化,提升对话效果和用户体验。
3.2 知识库和问答系统为了提供准确和实时的答案,机器人需要具备丰富的知识库和问答系统。
分类号学号M********* 学校代码10487密级硕士学位论文一个迎宾机器人软件系统的设计与实现学位申请人:黄国炎学科专业:软件工程指导教师:陈传波教授答辩日期:2014.1.6A Thesis Submitted in Partial Fulfillment of the Requirementsfor the Degree for the Master of EngineeringThe Design and Implementation of a Greeting Service Robot Software SystemCandidate : Huang GuoyanMajor : Software EngineeringSupervisor : Prof. Chen ChuanboHuazhong University of Science and TechnologyWuhan 430074, P. R. ChinaJanuary, 2014独创性声明本人声明所呈交的学位论文是我个人在导师指导下进行的研究工作及取得的研究成果。
尽我所知,除文中已经标明引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写过的研究成果。
对本文的研究做出贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律结果由本人承担。
学位论文作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,即:学校有权保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权华中科技大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
本论文属于保密□,在年解密后适用本授权书。
不保密□。
(请在以上方框内打“√”)学位论文作者签名:指导教师签名:日期:年月日日期:年月日华中科技大学硕士学位论文摘要近几年,智能机器人技术得到了快速的发展,应用领域也越来越广泛。
1 迎宾机器人整体方案设计本次设计的迎宾机器人整体外形是一个机器人卡通头像,尺寸小巧,外形可爱,适合摆放于桌面或台面上。
此机器人采用STC90S52单片机作为控制核心。
机器人的眼睛采用LED 点阵屏制作,可以显示眨眼、微笑等多种表情效果。
机器人的鼻子部位安装了热释红外探测头,可以检测到是否有人靠近。
机器人的嘴巴部位安装了喇叭,可以进行语音说话、唱歌等功能。
2 迎宾机器人硬件设计系统的硬件部分包括主控器模块、显示模块、语音模块和传感检测模块。
2.1 主控器模块设计本次设计采用STC90S52单片机作为主控芯片,其具有优异的性价比、功耗低等优点。
STC90S52单片机为40脚双列直插芯片,共有4个8位的I/O 口(P0、P1、P2、P3),每一条I/O 线都能独立地作输入或输出。
18引脚和19引脚接时钟电路, 9引脚接复位电路,20引脚为接地端,40引脚为电源端。
31引脚接高电平,代表使用内部ROM。
2.2 显示模块设计本次设计采用两个16*16的点阵屏作为机器人的眼睛。
点阵屏显示功能较好,可显示大量汉字和字符、图形,显示多样,清晰可见,并且成本相对较低,适用于各类仪器、小型设备的显示领域。
此次设计通过程序控制使两块点阵屏显示睁眼、眨眼、微笑三种表情效果。
显示模块接线图如下图1所示。
其中显示屏+5V、GND 连接电源5V。
单片机端口P0.0-P0.3分别连接点阵屏A、B、C、D 端口,用于控制16行。
通过2路HC138控制 SCK 时钟,SCK 端口连接单片机P2.5端口。
点阵屏LATCH 锁存连接单片机P2.6端口。
点阵屏R1红色数据信号连接至单片机P0.4端口,G1绿色数据信号连接至单片机P2.4端口,OE 使能端连接至单片机P2.1端口,使用此引脚控制拖尾现象。
图1 点阵屏显示模块接线图2.3 语音模块设计本次设计采用MY-F1090语音播放板作为语音模块,如图2所示。
MY-F1090语音播放板是一款应用于大功率场合的语音播放板。
迎宾机器人设计方案迎宾机器人设计方案一、引言迎宾机器人是一种能够主动接待和引导客人的机器人。
它可以通过语音和图像识别等技术与客人进行交流,并提供有关酒店、景点等相关信息。
本文将介绍迎宾机器人的设计方案。
二、主要功能1. 接待客人:机器人能够根据预定信息识别客人并进行个性化的问候。
通过酒店的客房预定系统,机器人可以自动识别客人并提供相应的服务。
2. 提供信息:机器人可以回答客人关于酒店设施、餐饮、交通等方面的问题,并提供相应的指引。
3. 引导客人:机器人可以通过语音和动作的方式引导客人到达目的地,例如酒店前台、客房等。
4. 语音交流:机器人具有语音识别和语音合成功能,能够与客人进行自然流畅的对话。
客人可以通过语音提问并得到机器人的解答。
5. 图像识别:机器人可以通过摄像头对客人进行人脸识别,从而提供个性化的服务。
此外,还可以通过图像识别识别客人的手势,例如指示需要帮助的方向等。
三、技术要点及实现方式1. 语音识别与合成:机器人可以通过集成语音识别和合成技术,实现与客人的语音对话。
可以使用现有的语音识别和合成引擎,如百度语音识别和合成的API等。
2. 图像识别:机器人可以通过摄像头对客人进行人脸识别和手势识别。
可以使用现有的人脸识别和手势识别算法,如OpenCV等。
3. 移动机器人平台:机器人可以使用移动机器人平台,通过激光传感器和导航算法,完成客人引导的任务。
4. 语义理解与对话管理:机器人需要具备语义理解和对话管理的能力,能够理解客人的意图并提供相应的回答。
可以使用现有的自然语言处理和对话管理技术,如百度对话开放平台等。
四、优势和应用前景1. 优势:迎宾机器人能够提供24小时不间断的服务,不受疲劳和情绪影响,保证了服务的连续性和一致性。
与传统的人工接待员相比,机器人更能满足客人的个性化需求,并且具有更高的效率。
2. 应用前景:迎宾机器人可以广泛应用于酒店、机场、商场等场所,为客人提供个性化的接待和引导服务。
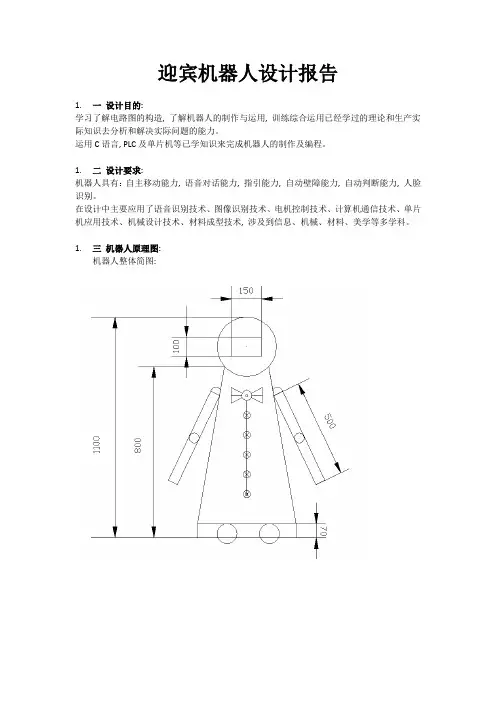
迎宾机器人设计报告1.一设计目的:学习了解电路图的构造, 了解机器人的制作与运用, 训练综合运用已经学过的理论和生产实际知识去分析和解决实际问题的能力。
运用C语言, PLC及单片机等已学知识来完成机器人的制作及编程。
1.二设计要求:机器人具有:自主移动能力, 语音对话能力, 指引能力, 自动壁障能力, 自动判断能力, 人脸识别。
在设计中主要应用了语音识别技术、图像识别技术、电机控制技术、计算机通信技术、单片机应用技术、机械设计技术、材料成型技术, 涉及到信息、机械、材料、美学等多学科。
1.三机器人原理图:机器人整体简图:机器人理框图:四人脸识别功能:机器人根据头部的摄像头进行人脸识别功能存储到计算机中并保存, 存在“熟人”以功能, 并可以在计算机中存储特定人员的资料, 需要时可在计算机中调出并显示于主屏幕, 且进行语音介绍。
五器人运动能力:机器人可以自主移动, 根据周围信息躲避障碍, 机器人有自我保护措施, 避免碰撞。
机器人可在规划路径上移动, 可以向前、后、左、右、转弯等移动。
机器人的头部可以左右转动45度等功能。
四机器人材料清单:1.需要个4个轮子2.4个减速电机, 6个驱动电机3.1块100*150的液晶显示屏.4.1个单片机控制器.5.1个小型音响.6.4个壁障感应器,1个红外线感应器,1个超声波感应器7.1个麦克风(用于语音识别)8.1个摄像头(实现人脸识别)9.2根1米铝合金(12×12×2000)10.层板 r250㎝×1㎝11.固定外观造型需要木条12.纸板, 做外观需要, 图上的纽扣就用拉花做。
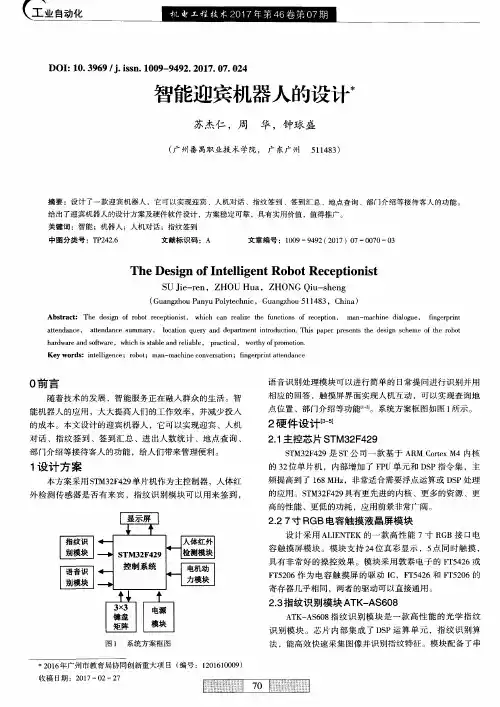
智能迎宾机器人控制系统设计摘要:本文设计了一款基于STM32的智能迎宾机器人控制系统。
该系统使用STM32芯片作为主控芯片,通过语音模块、周边环境检测模块、人脸识别模块的配合,实现了自主迎宾、路径自主规划、面部及语言识别、人机对话、智能跟随等功能。
实际测试分析结果表明,系统达到了预期设计的目标,具有低成本、低功耗、高性能的特点。
关键词:迎宾机器人;单片机;控制系统;智能目前,迎宾机器人的控制系统存在功能单一、调试不便、后期维护困难等问题,本文针对以上问题利用模块化编程思想,设计了一种基于物联网技术的迎宾机器人系统,通过将嵌入式系统、传感器应用与物联网技术进行有机结合,为迎宾机器人控制系统设计提供一种新思路。
1 系统总体设计智能迎宾系统利用多种传感设备实现周围游客目的地信息的获取,利用STM32单片机将采集的信息进行分析,通过WIFI、ZigBee等模块将信息传输至驱动机构,通过机器人将游客到达相应的地点。
2 硬件设计(1)控制模块根据本系统具有实时性强、外设多、需具备网络通信功能等特点,选择了STM32F103ZET6芯片作为核心处理器,其工作电压范围为2.0-3.6伏。
它集成了丰富的片内资源,包括256K至512K字节的闪存程序存储器,高达64K字节的SRAM,3个12位us级的模数转换器,转换范围为0至3.6伏,多达112个快速I/O口、11个定时器、13个通信接口等,有效的简化了外围电路的设计以及硬件设计的成本。
(2)语音交互模块的设计系统采用的是科大讯飞AIUI评估板,将游客提出的问题与云端指令库进行对比,随后将云端指令库中的信息发送至开发板,开发板进行指令与语音的转换,实现游客与机器人之间的对话。
(3)周边环境检测模块设计检测模块由人体感应模块、红外测距传感器、超声波传感器组成。
HC-SR501人体感应模块的信号是数字信号,信号输出端口可以直接连接到STM32单片机。
GP2D12红外测距传感器的信号是模拟信号,可通过STM32单片机的A/D转换模块处理后触发机器人相应操作。
摘要服务机器人系统是集机械工程、电子技术、计算机技术、传感技术、智能控制技术等技术的综合系统,在服务行业使用机器人,要求机器人服务技术含量高,对用户具有使用价值。
首先从机器人发展现状出发,重点介绍了服务机器人国内外研究与应用现状。
在分析现有服务机器人的基础上,提出利用新型数据处理芯片对迎宾机器人控制系统进行改进,能进行一定的人员与语音识别,实现人机交互,提高控制精度和响应速度。
本文讨论了迎宾机器人的机械系统结构,对迎宾机器人从控制到驱动执行机构进行了研究,并设计了迎宾机器人的机械结构。
同时还对机器人驱动系统进行了分析与设计,主要包括执行电机的选择以及选择相配的驱动器。
采用性价比高,控制简单的步进电机驱动,通过混合式步进电机驱动器,以采用外部控制模式,控制了步进电机的脉冲与方向,从而带动机械本体完成行走运动。
最后,本文设计出迎宾机器人眼部传感器设置,制作了热释电红外传感器装置,并进行了机器人胸前LED液晶显示器字幕显示,并对结果进行了对比分析。
实验表明,所设计的机器人的机械系统和手部执行机构能够较好地满足迎宾机器人的运动控制要求。
关键字:迎宾机器人控制系统机械结构AbstractService robot system is the same set of mechanical engineering, electronics technology, computer technology, sensor technology, intelligent control technology and other technology system, using robots, robots with high technical content, the user has a use value in the service sector. First, starting from the robot development status, focusing on domestic and foreign research and application of service robots. Based on analysis of existing service robots, the new data processing chip to improve the welcome robot control system, certain officers and speech recognition, to achieve human-computer interaction, and improve the control accuracy and response speed. This paper discusses the mechanical system structure of the welcome robot, welcome robot from the control to the actuator has been studied, and to design the mechanical structure of the robot Welcome. The robot drive system analysis and design, including the motor selection and select the drive to match. Cost-effective, simple control of the stepper motor drive, hybrid stepping motor drive to the external control mode, control of the stepper motor pulse and direction, so as to drive a mechanical body to complete the walking program. Finally, we design a welcome robot eye sensor set, produced a pyroelectric infrared sensor device, and the robot chest LED LCD display subtitles, and the results were compared. The experiments show that the design of the robot's mechanical systems and hand the implementing agencies to better meet the welcome robot motion control requirements.Keywords: welcome robot control system mechanical structure目录摘要 (I)Abstract (II)目录 (1)第1章绪论 (1)1.1 迎宾机器人的定义和分类 (1)1.2 迎宾机器人的设计前景 (1)1.3 迎宾机器人的设计原理 (2)1.4 结论 (2)第2章总体结构的设计 (3)2.1 开发目标和原则 (3)2.1.1 机器人达到的目标动作 (3)2.1.2 设计原则 (3)2.2 参考方案 (4)2.3 迎宾机器人整体的三维设计模型 (4)2.4 运动手臂的三维设计模型 (5)第3章方案详细设计 (6)3.1 手臂的详细设计 (6)3.1.1 基本要求的确定 (7)3.1.2 手臂动作的基本参数 (7)3.2 机器人驱动装置的一般要求 (7)3.3 迎宾服务机器人的驱动方式 (8)3.4 电机的选择 (8)3.4.1 臂部直流电动机的选择 (8)3.4.2 肘关节电动机的选择 (9)3.4.3 腕部电机的选择 (10)第4章机器人机械传动件的设计 (11)4.1 传动轴的设计 (11)4.1.1 主轴材料的确定 (11)4.1.2 初步估算轴的直径 (11)4.1.3 各轴段直径的确定 (11)4.2 锥齿轮的设计 (12)4.3 大齿轮的设计与校核 (13)4.3.1 设计参数 (14)4.3.2 布置与结构 (14)4.3.3 材料及热处理 (14)4.3.4 检查项目参数 (14)4.3.5 强度校核数据 (15)4.4 蜗轮蜗杆的设计 (16)4.4.1 设计校核 (16)4.4.2 蜗轮工作图 (17)第5章壳体的设计 (18)5.1 箱盒的设计 (18)5.2 肩部连接板 (18)5.3 联轴器的选用 (19)第六章控制部分设计 (20)6.1 控制方案概述 (20)6.2 手臂硬件需求分析 (21)6.3 控制系统结构 (21)6.4 控制芯片及I/O接口芯片的选型 (22)6.4.1 8051单片机介绍 (22)6.4.2 编码器 (24)6.4.3 零位开关 (24)6.4.4 电机驱动装置 (24)6.4.5 热释电红外传感器 (25)6.4.6 HD44780液晶显示器 (26)6.5 控制软件设计 (29)6.5.1 主程序流程 (29)6.5.2 迎宾动作子程序 (31)6.5.3 目标点控制子程序 (32)6.5.4 关节归零子程序 (34)6.6 控制回路整体测试 (36)致谢 (37)参考文献 (38)第1章绪论1.1 迎宾机器人的定义和分类工业机器人。
(2)控制系统的硬件结构
通过小组初步讨论决定控制计算机使用研华的主机,运动控制卡选用ADT(深圳众为兴),电机选用伺服电机.
(3)控制系统的软件部分
主要采用VC进行编程,构建一个控制系统平台,在程序中给定坐标后,实现机械手从一点移动到另一点进行上下料的搬运工作。
之所以使用VC,一方面,ADT 的运动控制卡支持VC进行编程,另一方面,使用VC进行编程比较灵活,易于改进和变化。
(4)电路图部分
根据所选的硬件设备,使用Protel进行绘制.
三、作者已进行的准备及资料收集情况
在设计之前,翻阅了多篇关于机器人方面的书籍.对于控制系统的发展及其在机器人上的应用都有了相关的了解,这为建立机器人控制系统的模型做了一些前期准备工作.在此期间,还自学Protel和Solidworks等软件,为控制系统的电路设计和程序设计做好了准备。
还借了《单片机基础》、《48小时精通Solidworks2014》、《工业机器人》等书籍便于今后设计过程翻阅参考。
四、阶段性计划及预期研究成果
1.阶段性计划
第1周:阅读相关文献(中文≥10篇,英文≥1篇),提交文献目录及摘要。
第2周:翻译有关中英文文献,完成文献综述、外文翻译,提交外文翻译、文献综述.
第3~6周:控制系统总体设计,提交设计结果.
第7~11周:硬件元器件的选型、I/O口接线图,提交设计结果
第,12~14周:软件编程,装配图。
第15周:工程图绘制,工程图。
第16周撰写毕业设计说明书,提交论文,准备答辩。
1引言1.1设计目的机器人可以干人不愿意干的事,把人从有毒的、有害的、高温的或危险的,这样的环境中解放出来,同时机器人可以干不好干的活,比方说在汽车生产线上我们看到工人天天拿着一百多公斤的焊钳,一天焊几千个点,就重复性的劳动,一方面他很累,但是产品的质量仍然很低;另一方面机器人干人干不了的活,这也是非常重要的机器人发展的一个理由,比方说人们对太空的认识,人上不去的时候,叫机器人上天,上月球,以及到海洋,进入到人体的小机器人,以及在微观环境下,对原子分子进行搬迁的机器人,都是人们不可达的工作。
机器人是一个具有有类人的功能,比如说作业功能;感知功能;行走功能;还能完成各种动作,还有一个特点是根据人的编程能自动的工作,这里一个显著的特点,就是可以编程,改变工作、动作、工作的对象和工作的一些要求。
是人造的机器或机械电子装置,所以这种机器人仍然是个机器。
但是目前还没有一个统一的有关机器人定义,一般来说认为机器人是计算机控制的可以编程的目前能够完成某种工作或可以移动的自动化机械,这是美国工程师协会定的一个定义,但日本和其他国家也对机器人有不同的看法,从完整的更为深远的机器人定义来看,应该更强调机器人智能,所以又提出来机器人的定义是能够感知环境,能够有学习、情感和对外界一种逻辑判断思维的这种机器。
那么这给机器人提出来更高层次的要求,所以要求设计出机器人。
1.2设计背景首先我介绍一下机器人产生的背景,机器人技术的发展,它应该说是一个科学技术发展共同的一个综合性的结果,也同时,为社会经济发展产生了一个重大影响的一门科学技术,它的发展归功于在第二次世界大战中,各国加强了经济的投入,就加强了本国的经济的发展。
另一方面它也是生产力发展的需求的必然结果,也是人类自身发展的必然结果,那么人类的发展随着人们这种社会发展的情况,人们越来越不断探讨自然过程中,在改造自然过程中,认识自然过程中,实现人们对不可达世界的认识和改造,这也是人们在科技发展过程中的一个客观需要。
第32卷 第12期 2010-12(上)【105】校园内导游服务型自主移动机器人设计与实现The designing and realizing of autonomous mobile servicerobot for school guidance黄敦华,李 勇,薛 梅HUANG Dun-hua, LI Y ong, XUE Mei(北京电子科技职业学院 自动化工程学院,北京 100176)摘 要:本文介绍了应用于校园教学楼内的导游服务型迎宾机器人的系统框架,包括总体性能、机械结构设计、控制系统组成、软件架构及实现方案、样机实验结果。
迎宾机器人应用在校园中有利于学校的教学和实践,同时服务学生和来访宾客。
实际机器人实验结果表明系统的稳定性和可靠性,实现了在校园走廊环境下的自主运动和避障。
关键词:迎宾机器人;自主移动机器人;运动控制;避障中图分类号:TP242.6 文献标识码:A 文章编号:1009-0134(2010)12(上)-0105-04Doi: 10.3969/j.issn.1009-0134.2010.12(上).350 引言随着社会生活水平的提高和机器人技术的发展,迎宾机器人越来越受到各行各业的关注[1]。
迎宾机器人有多变且友善的外观,可以和人类进行良好的音频视频互动,具有自主移动定位功能,并且方便搭载各行业专业的仪器设备[2]。
具有自主运动能力的迎宾机器人在社会服务业中具有极大的发展应用前景。
校园作为学生走向社会的过渡带具有独特的优势,迎宾机器人应用在校园中可以激发学生的学习兴趣,辅助老师的教学实践,方便学生及来宾的校园生活。
本文介绍的迎宾机器人即是应用在某院校教学实训楼内,可以完成来宾人脸识别、语音对话、走廊内自由行走、分实验室讲解等功能。
1 系统设计1.1 整体设计为了实现自主运动和导游服务功能,我们设计的机器人样机及内部机构如图1所示。
机器人身高165c m ,直径60c m ,重量:65kg,前胸部有8.4寸液晶触摸屏。
毕业论文课题名称迎宾机器人院/专业机械工程学院/ 机电一体化班级学号学生姓名指导教师:2016年5月24日毕业设计(论文)报告纸┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊摘要随着社会日新月异的飞速发展,人的地位是显得越来越重要,一些比较枯燥无味的工作越来越没人愿意去做,让人类从一些简单枯燥的工作中解放出来成为一种必然的趋势。
而迎宾机器人的出现,就完美的解决了这一系列的问题。
不仅可以代替人去工作,而且节省了开支,可谓是一举两得。
在实际应用中,迎宾机器人已经开始慢慢的在生活中崭露头角。
上海海底捞火锅,包括隆力奇生物有限公司等,都已经开始使用迎宾机器人,取得了相当令人满意的成果。
因此我决定用PLC 为控制器,光电传感器为检测器,步进电机为驱动器,设计一个迎宾机器人。
关键词:PLC、迎宾机器人、光电传感器、步进电机毕业设计(论文)报告纸┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊ABSTRACTWith the rapid development of social changes with each passing day, the person's status is more and more important,no one would like to do some boring work. It is being an inevitable trend to let the human liberate from some simple boring work. With the appearance of the robot receptionists, it solves series of problems effectively. Not only can replace human to work, and save the expenses,it may be said to kill two birds with one stone.The robot receptionists have begun to slowly cut a figure in the life in practice. Haidilao hot pot, the boss of hot pot industry in Shanghai,including many restaurants and places of public service such as llq biotechnology,which have begun to use robot receptionists, and obtained fairly satisfactory results.So I decided to use PLC as the controller, photoelectric sensor as the detector, step motor as actuator , to design a robot receptionist.Keywords: PLC,Robotic receptionists, Photoelectric sensor,Stepper motor毕业设计(论文)报告纸┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊目录第一章绪论 (1)1.1本课题的背景及意义 (1)1.2迎宾机器人的当前状况与前景展望 (1)1.3迎宾机器人的组成 (2)1.4本设计的主要内容 (2)第二章迎宾机器人的总体方案 (3)2.1本设计的仿真迎宾机器人的试样要求 (3)2.2 仿真迎宾机器人的总体方案 (3)第三章机械结构的设计及硬件的选择 (4)3.1步进驱动系统 (4)3.2电动推杆 (6)3.3光电传感器 (8)3.4手臂装配图及关键部位零件图 (10)第四章可编程控制器PLC (11)4.1可编程控制器PLC (11)4.2 PLC系统的选择与设计 (12)第五章迎宾机器人的电气设计及控制程序 (14)5.1 PLC系统控制原理 (14)5.2 PLCI/O分配表 (15)5.3 PLC外部接线图 (15)5.4 PLC梯形图 (16)第六章整机调试的问题及解决办法 (23)致谢 (26)参考文献 (27)┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊第一章绪论1.1本课题的背景及意义2007年,著名的比尔·盖茨先生曾经在一次会议中说过“家家都有机器人”。
1前言
随着社会的发展,人工成本越来越高,一些简单繁琐的工作,比如迎宾这个工作,越来越多的人们不愿意花费时间去做。
随着机器人技术的发展,越来越多的地方开始采用迎宾机器人去完成这些简单繁琐无味的工作。
但是,我国的机器人产业发展起步的比较晚,一些迎宾机器人的价钱昂贵,维修费用高,而且维修过程繁琐,所以,我国的迎宾机器人的使用率不高。
为了更好的服务广大群众,更加高效完成工作,迎宾机器人要普遍投入使用,更要完善的是迎宾机器人的经济成本和功能设定。
争取让机器人进入我们的生活。
2国内外研究现状
机器人自40多年前诞生以来,主要在生产制造领域发展比较迅速。
而对迎宾服务型机器人产品,由于技术含量尤其是智能方面要求较高,国内外一直处于研发状态,只是在二十世纪末才有公司正式推出限量产品。
本田公司于1996年在全球率先发布了第一个双足步行式机器人原型“P2”, 1996年发布的P2是世界首个类人智能双足步行机器人,而且,由于把主机、控制马达、电池、无线通讯等必要的机器全部藏起来,不仅实现了无线遥控,还使他在外观上比较“光鲜”。
1997年完成的P3比他的“兄弟”P1和P2乖巧玲珑得多,身高只有1.6米,体重仅为130千克,这要得益于零配件材料的改良,而且在电脑实现分散型的控制之后,机器人满足了小型化和轻量化的要求,更利于融入人类的生活。
2000年推出新一代“P3”改进后的更加小型、轻量化的两脚站立行走类型的机器人“Asimo”。
iRobot机器人吸尘器英文名称为“Roomba”,中文为“伦巴”,是由美国iRobot公司生产。
美国麻省理工学院(MIT) 罗德尼·布鲁克斯教授(Rondy Brooks),主持世界最大的大学实验室——电脑科学暨人工智能实验室(Computer Science and Artificial Intelligence Laboratory, 简称CSAIL),于1990年带着得意门生-科林·安格尔(Colin Angle)和海伦·格雷纳(Helen Greiner),以CSAIL所提供的创业基金为基础,创办了iRobot 公司。
iRobot最初专注于军用机器人的研究,创造了PackBot等机器人,公司于2002年开始涉足家用机器人市场,并在2002年推出了具有历史历史意义的机器人吸尘器Roomba。
我国机器人研究和应用开始于20世纪70年代,受当时经济体制等因素的制约,发展比较缓慢,研究和应用水平比较低。
进入20世纪80年代以后,随着改革开放的不断深入,我国迎宾机器人技术的开发和研究才达到一定水平,迎宾机器人技术也得到了快速的发展。
从20世纪70年代到现在已经历三个时代,我国的机器人基本能适应各种行业的需求,迎宾机器人的发展有人有了质飞跃。
目前国内服务机器人仍处于研发阶段虽然我国的机器人事业起步较晚,但是国家相关部门对机器人事业的发展始终抱着极大的热情和大力的支持,在我国机器人的技术起步是比较晚的,但技术的发展是迅速的。
我国的迎宾机器人技术也是取得成果的。
比如哈工大的智能导游服务机器人。
3 迎宾机器人的分类
服务机器人。
服务机器人主要指那此在能够代替人们完成一定工作,或提供社会及家庭服务的机器人。
目前,对于非制造领域的服务机器人的研究己经取得了丰硕的成果,各类服务型机器人己经在日常的生产和生活中获得了非常广泛的应用外,代替人们完成工作,服务机器人也己经获得了一定程度的应用,并在不断的改进和完善当中。
工业机器人。
工业机器人主要应用于飞工业生产当中,是现阶段应用最为广泛,技术最为成熟的一类机器人,据不完全统计,世界范围内装备生产的工业机器人己经超过了120万台。
其中,日本和美国是工业机器人的生产和应用大国,尽管日本曾因上世纪的金融危机一度丧失了机器人霸主地位,但随着近年来日本经济的迅速发展,在新安装的机器人台数方面,日本己经超过了美国。
中国由于飞各种原因的影响,对于工业机器人的研究起步较晚,虽然己经研制出一系列的工业机器人样机,但只获得了小规模的生产和应用,尖端领域的机器人仍以进口为主。
4 迎宾机器人的发展趋势
我国发展机器人技术的主要战略目标是根据我国对先进制造业及自动化技术的需求,看准国际机器人前沿技术的发展方向来进行创新性的研究,并开发占主导作用的工业机器人的基础技术、产品技术以及相关系统技术。
所以,迎宾机器人技术主要发展方向是智能化、低成本、集成化和高可靠性、产业、智能、商品化的快速发展阶段。
机器人在制造业中的应用已经有了非常明显的进步,已经发展成了一种标准设备,广泛应用于工业生产中。
各国行业将对机器人的需求会随着机器人应用领域的不断扩大
而增加,日常生活领域有广泛和重要的运用。
因此,迎宾机器人技术必将成为未来的研究热点和重点领域。
5 迎宾机器人设计原理
迎宾机器人由机械结构和控制系统两大部分组成。
在实际应用中,迎宾机器人根据不同环境可能放置在各种不同的位置,因采用了单片机软硬控制相结合的方法,机器人即可适应不同的环境,使用方便。
还有,当迎宾机器人更换放置地方后,需要通过简单调节热释电红外探测电路的灵敏度电位器来确定人来的方向。
经过检验,设计的迎宾机器人结构简单、成本较低,稳定性比较好,具有一定的实际应用价值和作用。
一个智能机器人应该具备三大要素:感知、决策、行动。
决策要求机器人具有能够依据某种条件限制自主目标,规划实现目标的具体方案、步骤的能力。
行动需要机器人具备完成一些基本工作、基本动作的能力。
感知就是机器人具有能够感觉内部、外部的状态和变化,理解这些变化的某种内在含义的能力。
6 总结部分
随着科学技术的发展,迎宾向着集成工艺和多变量复合的方向发展。
各种不同类型的迎宾机器人将会越来越多的出现在我们的日常生活中,给我们带来极大的方便。
虽然我国的机器人市场不大,但是随着科技的进步,科研人员的努力研究,机器人的时代已经开始来临,随着社会的发展, 科学技术的进步, 机器人技术的发展速度越来越快, 机器人产业也将逐步进入我们生活的每一个角落。
工业机器人将继续占据机器人的主要市场。
特殊机器人越来越收到重视, 市场份额将逐步增长。
可以说,我们已经跨入了机器人时代。
机器人产业在未来将是一个热门产业。
参考文献
[1] 刘源.多自由度工业机器人控制系统设计[D] . 赣州:江西理工大学,2012.
[2] 林德杰.过程控制仪表及控制系统[M] . 北京:机械工业出版社,2009.
[3] 朱万辉.七自由度焊接机器人控制系统设计[D] . 马鞍山:安徽工业大学,2012.
[4] 徐国华,谭民.移动机器人的发展现状及其趋势[J].机器人技术与应用,2001
[5] 毕胜.国内外工业机器人的发展现状[J] . 机械工程师,2008
[6] 杜利超,钱桦,肖爱平.大棚喷雾作业机器人底盘的设计与研究[ J ] .广东农业科
学,2010( 5)196
[7] 谭民,王硕.机器人技术研究进展[J] . 自动化学报,2013,39(7):963-972.
[8] 李宇剑,巢明.我国工业机器人产业现状与发展战略探讨[J]. 制造业自动化,2010,33(12).
[9] 吴薇.某射击机器人实验平台硬件控制方案设计[J]. 传感器世界,2013,19(6).
[10] 神原伸介,张炜.日本工业机器人最新发展动向[J]. 机器人技术与应用,2008,.
[11] 张红霞.国内外工业机器人发展现状与趋势研究[J]. 电子世界,2013,(12).
[12] 蔡林林.家用机器人手臂及其运动学研究[J].机电产品开发与创新,2009
[13] 朱冬梅,胥北澜.画法几何及机械制图[M].北京:高等教育出版社,2000.
[14] 周开勤.机械零件手册[M].北京:高等教育出版社,2001.
[15] Corradini M L, Leo T, Orlando G. Robust of a mobile robot violating the nonhohmomic stabilization constraint via quasi-sliding mode[C]. Proceedings of the American Control Conferenee, 1999: 3935-3939.。