基于单神经元PI控制的逆变器系统仿真
- 格式:pdf
- 大小:190.53 KB
- 文档页数:3


风力发电变流系统仿真及逆变器的单神经元控制的开题报告一、研究背景近年来,随着能源需求的不断增加,研究新能源技术成为了各国政府和工业界的共同关注点。
风能作为具有丰富、清洁和可再生性的能源,越来越受到人们的重视。
风力发电不仅可以减少温室气体的排放,还可以降低对传统能源的依赖程度,提高能源安全性。
然而,由于风力发电的不稳定性和不可控性,其能量输出的波动性较大,这为风力发电的普及和应用带来了一定的挑战。
为了充分利用风能,提高风力发电的效率和稳定性,需要研究一种有效的变流系统和控制方法。
逆变器是一种常见的风力发电变流系统,其作用是将风能转换为电能,将输出电流的频率、电压和相位调整到与电网一致。
同时,为了保证风力发电系统的安全和可靠性,需要采用一种合理的控制策略。
单神经元控制作为一种新兴的控制方法,具有简单性、易操作性和实时性等优点,能够有效地控制逆变器输出波形,提高风力发电的稳定性和控制性能。
二、研究目的本研究旨在利用仿真技术,对风力发电变流系统进行建模和分析,并研究采用单神经元控制的逆变器控制策略,以提高风力发电的稳定性和有效性。
三、研究内容1. 风力发电变流系统的建模和仿真建立风力发电变流系统的电路模型,进行系统仿真,并探究不同工况下系统的性能和特性,以获取系统的基础数据和原始波形。
对得到的数据进行分析和处理,为进一步探讨逆变器的控制策略提供参考。
2. 单神经元控制逆变器的设计和仿真针对风力发电变流系统的特点和要求,设计并仿真单神经元控制逆变器,分析不同控制参数对输出波形的影响,并对其控制性能进行评估。
3. 风力发电变流系统仿真与实验验证在仿真的基础上,设计实验方案,搭建实验平台,通过对实验数据的采集和分析,验证仿真结果的准确性和可靠性,并进一步优化和改进控制策略。
四、研究意义和预期成果本研究的意义在于:1. 为提高风力发电的效率和可靠性提供新思路和方法。
2. 对单神经元控制逆变器的控制策略进行了研究和分析,为探索逆变器的其他控制方法提供了参考。


单神经元PID控制仿真与实现研究
鲁博;张寿明;冯欣怡;郭英英
【期刊名称】《工业仪表与自动化装置》
【年(卷),期】2024()1
【摘要】经典PID控制参数整定方法繁琐并且容易对设备造成损伤,此外,当系统对象存在非线性、环境变化或者其他因素时,系统的稳定性和响应速度也会受到一定的影响。
为了解决这些问题,该文引入神经网络与PID控制方法相结合,控制对象选择双容水箱,对系统进行多次仿真、对比,然后提出神经网络控制仿真参数设置方法,进而将神经网络PID控制算法应用于实际控制系统中,实验证明该创新方案不仅解决了PID控制方法存在的问题,还找到了一个低成本的升级方案,为控制系统提供了重要的技术支持。
【总页数】6页(P3-8)
【作者】鲁博;张寿明;冯欣怡;郭英英
【作者单位】陕西科技大学镐京学院咸阳市人工智能重点实验室;昆明理工大学信息工程与自动化学院;西安工商学院计算机学院
【正文语种】中文
【中图分类】TP27
【相关文献】
1.基于比例系数改进的单神经元PID控制及仿真研究
2.单神经元PID控制器仿真及其PLC实现
3.基于Proteus的变增益单神经元PID控制仿真研究
4.单神经元自适应PID控制器的实现与仿真研究
5.单神经元PID控制器仿真及其PLC实现
因版权原因,仅展示原文概要,查看原文内容请购买。

基于PLC的单神经元PID控制器的实现任俊杰自动化学院,北京联合大学,北京,100101,中国******************.cn摘要:考虑到复杂的控制系统非线性,纯滞后,大惯性,以及随时间变化的特点,传统的PID控制算法通常未能获得较好的控制效果。
将神经网络控制算法与传统的PID控制算法结合起来,神经元自适应PID控制能有效地提高了系统的性能。
本文设计的基于PLC的是一个单一的神经元PID控制器。
该控制系统的结构是简单的。
实现单神经元PID算法的功能块程序写在结构控制语言(SCL)。
该函数块具有常用和方便的特点。
实验结果表明,这种方法不仅高效,而且实用。
关键词:单神经元,PID,PLC,SCLI.简介由于PID控制算法简单,易于实施和良好的鲁棒性,它被广泛应用于工业过程控制系统。
但是,对于一个复杂的控制系统的非线性,纯时间延迟,大惯量和随时间变化的特性,传统的PID控制算法通常不能获得更好的控制效果。
添加先进的智能控制传统的PID控制算法,控制效果会更理想。
具有近似任意连续有界非线性函数的功能,神经网络是一种来解决非线性系统和不确定的系统有效的方式[1]。
在本文中,神经网络与传统的PID控制结合为应用PLC的神经自适应PID控制器。
他们发挥各自的优势。
与传统的PID控制相比,它具有超调小,控制高精度,抗干扰性能强的优点。
II.基于PLC的控制系统的结构单神经元PID控制器被应用到控制系统。
它具有传统PID的优点,并且还具有神经网络的优点,如并联结构,结构简单,学习和记忆功能和以及容易实现的特点[2]。
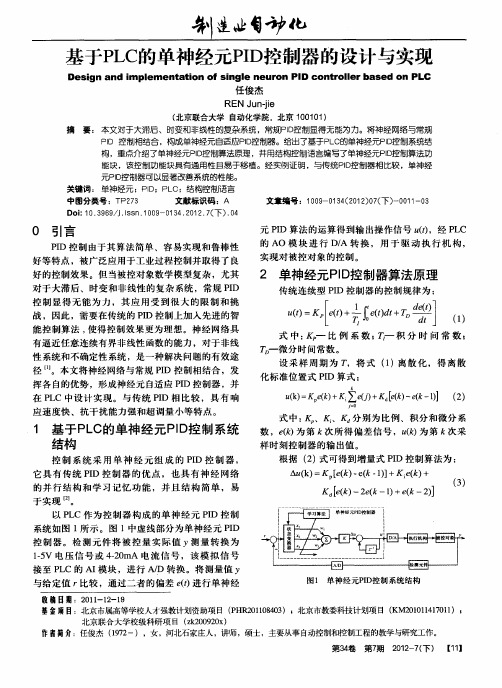
图1显示了用PLC作为控制器的单神经元PID控制系统。
图1中的虚线表示的是单个神经元PID控制器。
实际输出值y用计量装置转换为1-5V的电压信号或4-20mA的电流信号。
模拟信号连接到PLC的AI模块进行A / D转换。
用户程序中,比较了测量值y与设定值r,误差e测量和转换为三个输入信号的单神经元对应的比例,也比较了积分和差的功能。

基于电阻炉的单神经元PID控制器的设计及仿真
方红;王剑云
【期刊名称】《自动化与仪器仪表》
【年(卷),期】2011(0)5
【摘要】对传统电阻炉PID控制器的不足之处进行了分析,阐述了单神经元PID控制算法的优点。
介绍了根据有监督hebb学习算法,再结合实际控制经验而设计的单神经元控制器。
分析了单神经元控制器中各个参数的意义与取值原则,并用Matlab软件对单神经元控制器在阶跃输入信号的情况下进行了仿真。
仿真内容有:连接权值、K值变化对系统的影响及选取方法;单神经元PID控制器与常规PID控制器的抗干扰能力和调节性能对比。
仿真结果证明单神经元控制器具有很好的参数自整定能力,且抗干扰能力强,超调量小,控制效果在各个方面都要优于常规PID控制器,单神经元控制器用于电阻炉温度控制系统比传统的PID控制器能取得更好的控制效果。
【总页数】3页(P55-56)
【关键词】单神经元PID;Hebb学习规则;自适应控制器;仿真
【作者】方红;王剑云
【作者单位】成都大学电子信息工程学院
【正文语种】中文
【中图分类】TP273.21
【相关文献】
1.基于单神经元PID控制器的异步电动机软启动器仿真 [J], 唐小洪;王宏华
2.基于单神经元的PID自适应控制器的仿真研究 [J], 李璟;陈明凯
3.基于线性二次型的单神经元PID最优控制器设计及仿真 [J], 任雯;闻霞;王维庆
4.基于模糊PID的电阻炉温度控制器的设计与仿真研究 [J], 李先峰;杨国华;李建春
5.用于电阻炉的单神经元PID控制器的设计及仿真 [J], 方红;王剑云
因版权原因,仅展示原文概要,查看原文内容请购买。



基于pi+重复控制的单相逆变器研究文章标题:基于Pi+重复控制的单相逆变器研究1. 背景介绍单相逆变器是一种将直流电转换为交流电的装置,广泛应用于太阳能发电系统、电动汽车充电桩等领域。
而在单相逆变器的控制算法中,Pi+重复控制是一种常见的控制策略,具有较好的动态性能和稳定性。
本文将围绕基于Pi+重复控制的单相逆变器进行深入探讨。
2. Pi+重复控制原理及特点Pi+重复控制是一种混合控制方法,结合了比例积分控制和重复控制的优点。
在单相逆变器系统中,Pi+重复控制可以有效抑制谐波、提高电流质量,并且具有良好的鲁棒性和动态响应。
其控制原理涉及到频率锁定环(PLL)和电流环控制,能够实现高精度的交流电压输出。
3. Pi+重复控制在单相逆变器中的应用通过Pi+重复控制算法,单相逆变器可以实现高效、稳定的能量转换。
该控制策略在太阳能逆变器、UPS电源系统、电动汽车充电桩等领域得到广泛应用,为系统提供了可靠的电能输出。
4. Pi+重复控制的优化与改进随着电力电子技术的发展,对Pi+重复控制算法的优化和改进势在必行。
结合深度学习、模糊控制等新技术,可以进一步提高单相逆变器系统的性能和效率。
5. 个人观点及总结在单相逆变器研究领域,Pi+重复控制作为一种有效的控制策略,为系统的稳定运行和高质量能量输出提供了重要支撑。
未来,随着新技术的不断涌现,Pi+重复控制算法必将迎来更加广阔的应用前景。
通过对基于Pi+重复控制的单相逆变器进行深入研究,我们不仅可以更好地理解其工作原理和特点,还能够为相关领域的工程实践提供有力支持。
期待本文能为您带来对单相逆变器控制策略的深入理解,并激发更多关于Pi+重复控制算法的思考和探索。
在单相逆变器系统中,Pi+重复控制算法是一种常见的控制策略,具有较好的动态性能和稳定性。
但是,随着电力电子技术的发展和需求的不断增加,对Pi+重复控制算法的优化和改进变得尤为重要。
本文将继续探讨Pi+重复控制算法的优化与改进,并展望未来该算法在单相逆变器系统中的应用前景。

单神经元自适应 PID 控制器及其仿真研究摘要:随着科学技术的不断发展和进步,被控对象变得越来越复杂,传统的pid控制器对时变系统和非线性系统往往得不到较好的控制效果。
本文重点研究了单神经元自适应pid控制器,分析了学习规则,并对控制对象的跟踪特性做出了仿真研究。
仿真结果表明,这种控制器不但具有pid控制的优点而且还具有自适应特点,具有良好的控制性能。
关键词:单神经元;pid;自适应;仿真【中图分类号】g4201.单神经元自适应pid控制器单神经元作为构成神经网络的基本单位,具有自学习和自适应能力,而且结构简单易于计算。
而传统的pid控制器也具有结构简单、调整方便和参数整定与工程指标联系密切等特点。
若将这两者结合,则可以在一定程度上解决传统pid控制器不易在线实时整定参数、难于对一些复杂过程和参数慢时变系统进行有效控制的不足。
用神经元实现的自适应pid控制器的结构框图如图1-1所示:单神经元控制系统的结构如图1所示。
图中转换器的输入为设定值r(k)和输出y(k),转换器的输出为神经元学习所需要的状态量x1,x2,x3,k为神经元的比例系数。
神经元自适应控制器的控制算法为:单神经元的控制算法中的权系数wi(k)可以通过自学习功能进行自适应调整,单神经元自适应pid控制器正是通过对加权系数的调整来实现自适应、自学习功能的。
加权系数的调整可以采用不同的学习规则,从而构成不同的控制算法。
2、单神经元自适应pid控制器学习规则2.1 有监督hebb学习规则对于有监督的hebb学习规则由于加权系数wi(k)和神经元的输入、输出和输出偏差三者的相关函数有关,因此采用有监督hebb 学习算法时有(1-12)(1-13)根据无监督的hebb学习规则的推导,可以得到(1-14)同样为保证这种单神经元自适应控制学习算法的收敛性和鲁棒性,将其规范化处理后可得式(1-15)。
(1-15)(1-16)其中,,,(1-17),是输出误差信号,分别表示比例、积分、微分的学习速率。

第3期(总第154期)2009年6月机械工程与自动化M ECHAN I CAL EN G I N EER I N G & AU TOM A T I ON N o 13Jun 1文章编号:167226413(2009)0320069202单神经元P I D 控制器研究及仿真张世韬,杨 风,郝 骞(中北大学信息与通信工程学院,山西 太原 030051)摘要:基于单神经元P I D 控制算法,通过修改神经元控制连接加权系数和合理选择神经元系数,构成P I D 控制器,在此基础上建立单神经元P I D 控制器的Si m ulink 仿真模型,并给出仿真实例。
关键词:单神经元;P I D 控制器;Si m ulink 仿真中图分类号:T P 273 文献标识码:A收稿日期:2008210217;修回日期:2008212222作者简介:张世韬(19842),男,山西临汾人,在读硕士研究生。
0 引言传统的P I D 调节器由于其技术成熟,在过程控制中获得了广泛的应用,但对一些复杂过程、参数时变系统,由于P I D 的参数不易实时在线调整,在应用中影响系统的控制品质。
神经元作为构成神经网络的基本单位,具有自学习和自适应能力,由它构成的控制系统算法简单,易于实现,能够适应环境的变化,有较强的鲁棒性,可实时控制。
最显著的一点是不需要对被控对象进行精确的辨识,不需要知道被控对象的结构和参数,即单神经元控制器的设计无需系统建模。
单神经元的这些特点使它越来越多地引起人们的注意,并开始得到应用。
1 单神经元P I D 控制算法及其控制器111 单神经元学习算法单神经元学习算法就是调整连接权值W i 的规则,它是单神经元控制器的核心,并反映了其学习的能力。
学习算法如下:W i (k +1)=W i (k )+Γr i (k )。
(1)………………其中:r i (k )为随过程递减的学习信号;Γ为学习速率,Γ>0。



第24卷第4期 齐 齐 哈 尔 大 学 学 报 Vol.24,No.4 2008年7月 Journal of Qiqihar University July,2008单神经元自适应PID 控制器的实现与仿真研究曹伟1,乔金杰2(1.哈尔滨工程大学 自动化学院,哈尔滨 151000;2.齐齐哈尔大学 经济管理学院,黑龙江 齐齐哈尔 161006) 摘要:给出了单神经元自适应PID 控制器的算法与控制系统仿真模型。
利用单神经元PID 控制器的自学习、自适应能力实现PID 控制参数的自整定。
并对被控对象进行了仿真研究,仿真结果表明,该控制方法与常规PID 控制方法相比,具有更好的自适应性和更强的鲁棒性。
关键词:单神经元;PID;仿真中图分类号:TP183 文献标识码:A 文章编号:1007-984X(2008)04-0014-03神经网络应用于控制系统设计的主要原因是针对系统的非线性、不确定性和复杂性。
由于神经网络的适应能力、并行处理能力和鲁棒性,使得采用神经网络的控制系统具有更强的适应性和鲁棒性。
这点在神经网络PID 控制器中显露无遗。
传统的PID 调节器则具有结构简单、调整方便和参数整定与工程指标联系密切的优点。
但是对于传统PID 控制器来说,它也具有一定的局限性:当控制对象不同时,控制器的参数难以自动调整以适应外界环境的变化,且难于对一些复杂的过程和参数慢时变系统进行有效控制。
而将神经网络技术与传统PID 控制相结合,则可以在一定程度上解决传统PID 控制器不易进行在线实时参数整定等方面的缺陷,充分发挥PID 控制的优点。
1 增量式PID 控制算法在计算机控制系统中,使用的是数字PID 控制器,数字PID 控制算法通常又分为位置式PID 控制算法和增量式PID 控制算法。
离散PID 表达式为0()()()[()(1)]kP I D j U k K e k K e j K e k e k ==++−−∑ (1)式中:k 为采样序号,()U k 为第次采样时刻的计算机输出,()e k 为第次采样时刻输入的偏差值,(1)e k −为第次采样时刻输入的偏差值,P K 为比例系数,I K 为积分系数,D K 为微分系数。

基于单神经元PI控制的逆变器系统仿真焦保帅;尹斌;陶树建【摘要】This paper introduces one kind of single neuron PI controller that can adjust the scale factor K according to the error to the inverter control loop, it can adjust the parameters online and does not rely on the model of the system. The simulation results show that : this controller has smaller overshoot and has some adaptive capability, it has also capacity to good dynamic respond.%将一种根据误差的大小来调节比例系数K值的单神经元PI控制器引入到逆变器的控制回路中.可以实现在线调整参数。
在一定程度上不依赖于系统的模型。
仿真结果表明:与常规的PI控制器相比该控制器的输出超调量较小,有一定的自适应能力,可以提高逆变电源系统的动态性能。
【期刊名称】《电子设计工程》【年(卷),期】2012(020)005【总页数】3页(P103-105)【关键词】逆变器;单神经元PI;控制器;PWM;双闭环【作者】焦保帅;尹斌;陶树建【作者单位】河海大学能源与电气学院,江苏南京211100;河海大学能源与电气学院,江苏南京211100;河海大学能源与电气学院,江苏南京211100【正文语种】中文【中图分类】TM464;TP391.9逆变器是将直流电能变换成交流电能的变流装置,供交流负载用电或与交流电网并网发电。
随着光伏发电和太阳能发电等新兴能源的兴起,逆变器在生产和生活中显得日益重要。

单神经元自适应PID控制器仿真实验报告一、实验目的1、熟悉单神经元PID控制器的原理。
2、通过实验进一步掌握有监督的Hebb学习规则及其算法仿真。
二、实验内容利用单神经元实现自适应PID控制器,对二阶对象和正弦对象进行控制,在MATLAB环境中进行仿真。
被控对象为y(k)=0.3y(k-1)+0.2y(k-2)+0.1u(k-1)+0.6u(k-2)三、实验原理1、单神经元模型:图1 人工神经元模型图图2 Sigmoid人工神经元活化函数单神经元的McCulloch—Pitts模型如图1,图2所示。
x1,x2,x3…xn是神经元接收的信息,w1,w2,…为连接权值。
利用简单的线性加权求和运算把输入信号的作用结合起来构成净输入input=∑w j x j−θ。
此作用引起神经元的状态变化,而神经元的输出v是其当前状态的激活函数。
2、神经经网络的有监督Hebb学习规则学习规则是修改神经元之间连接强度或加权系数的算法,使获得的知识结构适应周围环境的变化。
两个神经元同时处于兴奋状态或同时处理抑制状态时,它们之间的连接强度将得到加强,当一个神经元兴奋而另一个抑制时,它们之间的连接强度就应该减弱。
这一论述的数学描述被称为Hebb学习规则。
在学习过程中,网络根据实际输出与期望输出的比较,进行联接权系数的调整,将期望输出称导师信号是评价学习的标准。
这样,就得到了有监督的Hebb学习规则如果用oi表示单元i的输出,oj表示单元j的输出Wij表示单元j到单元i的连接加权系数,di表示网络期望目标输出,η为学习速率,则神经网络有监督的Hebb学习规则下式所示。
∆w ij(k)=η[di(k)−oi(k)]oi(k)oj(k)(1) 3.基于单神经元的PID控制单神经元控制系统的结构如图3所示。
图中转换器的输人为设定值r(k)和输出y(k),转换器的输出为神经元学习所需要的状态量x1,x2,x3,K为神经元的比例系数。
图3 单神经元自适应控制器结构图单神经元自适应控制器是通过对加权系数的调整来实现自适应、自组织功能的,权系数的调整是按有监督的Hebb规则实现的。

逆变器单神经元自调节 PID电流控制策略研究摘要:近年来,随着传统能源的枯竭,我国开始大力发展绿色友好型的可再生能源,其中新能源光伏发电技术在我国能源发展上的重要性日益凸显。
并网逆变器作为电网与光伏发电系统之间的核心接口设备,对入网电流质量具有重大影响。
在实际工程中,出于保护设备的功率开关管的目的,大多场合采用逆变侧电流反馈控制,但该控制结构在数字控制下难以兼顾良好的系统动态响应能力和鲁棒性,在谐振峰附近的三次截止频率处通常存在相位裕度过低的情况,大幅放大了该频率处的高频谐波,从而不满足国家规定的并网标准。
关键词:逆变器单神经元;自调节;PID电流控制策略引言随着能源紧缺和环境污染日益严峻,光伏等新能源以其环保性和不竭性日益成为解决危机的有效措施。
逆变器作为光伏并网系统的核心,其控制技术是整个并网系统的研究重点。
现有的光伏并网逆变器多采用传统的PID控制器,具有结构简单、易于数字化等优点,但由于光伏并网系统本身具有非线性,利用线性控制策略(传统PID控制)难以获得良好的动态性能,即用固定不变的PID参数去控制参数不断变化,系统干扰较多的系统,难以获得理想的控制效果。
由于模糊控制本身是一个非线性的控制方法,抗干扰能力强,具有良好的自适应性,因此本文将模糊PID控制应用于逆变器的控制中。
1单神经元自调节PID调节器单神经元自调节PID调节器的等效过程如图1所示。
图1单神经元自调节PID调节器等效模型图1中,K为该过程中的增益值,所以可以得到如下式的关系式:其中式中:X为输入向量;W为连接权值向量。
根据式(1)可以得到输出的表达式为式中:u(k)为输出值。
本文所提方案的基础是单神经元,该方案的优点是具有自调节以及自主学习的能力,因此将上述理论与传统的PID调节器进行组合控制,能够消除传统PID 调节器固定参数的缺点。
单神经元的输入与输出之间的变化关系如下式:控制量计算公式为其中,x1(k)类似于传统PID调节器中的积分项;x2(k)类似于传统PID 调节器中的比例项;x3(k)类似于传统PID调节器中的微分项。