多功能室外智能移动机器人实验平台― THMR-V
- 格式:pdf
- 大小:277.78 KB
- 文档页数:5
1 绪论1.1 机器人技术发展历程自20世纪50年代世界上第一台机器人装置诞生以来,机器人技术经历了一个从低级到高级的发展过程,机器人(ROBOT)一词的含义也越来越广泛。
最早期的顺序控制型机器人只能按照事先编制的指令完成预定的动作序列;随后出现了"示教—再现"机器人,可以利用记忆装置,按照一定的速度记录下"示教"过程的姿态信息和操作内容,然后"再现"原轨迹和操作内容;后来出现了可控轨迹型机器人,具有了完善的计算机控制系统和较强的计算能力,只需给出操作任务和部分轨迹信息,机器人就可以自动规划出完整的控制程序。
随着科学技术的进一步发展,各种新型的传感器为机器人赋予了更多的"感觉",适应型机器人就是这样一类机器人,它可以采集各种外部"感觉"(如视觉、触觉等)信息,适当的调整其运动轨迹和操作,适应环境的变化。
到今天为止,机器人发展的最高水平是智能机器人,它是当今机器人发展的热点和重点。
智能机器人除了具有感知环境和简单的适应环境能力外,还具有较强的识别理解功能和决策规划功能。
目前,已经有出现了多种智能机器人,例如日本SONY公司生产的"爱宝"机器狗,本田公司的ASIMO以及SONY 公司最近推出SDR-4X等。
从机器人的简要发展历程可以看出,机器人的发展正朝着多功能化、智能化、大众化的方向发展。
机器人的概念已不再是传统的装配机、机械手和数控机床,新兴的高度智能化的仿生机器人,体积微小的纳米机器人,不畏艰险的探险机器人等不断地充实着机器人这个大家庭,其中,智能机器人所占的比重必将越来越大,它在诸如军事、医疗、娱乐、探险等越来越广泛的范围内将发挥重要的作用。
按照智能机器人的智能化程度高低,可以分为外部受控机器人,半自主机器人和全自主机器人。
外部受控机器人的本体上没有智能单元,只有执行机构和感应机构,它受控于主机器人或者外部计算机。
视觉导航及实验验证平台综述摘要:本文概述视觉导航技术。
视觉导航通过图像采集设备收集近距离的环境信息,并利用计算机视觉技术进行图像处理获得环境信息,实现导航。
首先比较了各种导航方式的优缺点,分析视觉导航的意义。
接着概述了视觉导航的应用领域和研究现状,然后分析比较了视觉导航中的一些关键技术,简单介绍了视觉导航领域的SLAM问题。
最后,综合国内外视觉导航技术研究存在问题,提出进一步研究方向和应用途径。
关键词:视觉导航;移动机器人;智能车辆;图像匹配;路径识别0 引言在当今世界的先进技术领域里,往往存在这样的问题:为了完成某种特殊的任务,需要在已知或者未知环境中,使特殊的能完成既定任务的实验设备或平台按照既定的且满足最优条件的路径运动或者到达既定目的地,这一类的问题便是导航。
对于一般的导航系统,在给定命令的前提下,结合环境中的各种探测信息,并根据自身位姿信息作出决策使运动体而到达目标,在运动过程中,还需要不断优化全局路径。
导航系统需要完成的任务包括以下三点:一,获取信息;二,处理信息;三,作出决策(即路径规划)。
目前广泛使用的导航方法有[1]:航标法,航位推算法,天文导航,惯性导航,无线电导航,卫星定位导航和组合导航等。
下文对各种导航方法对比说明。
航标法习惯称之为目视方法,它借助于信标和参照物对运动物体进行引导。
目前仍在应用,但是这种方法过于依赖经验,受天气、地理条件的影响。
航位推算法是通过一系列的速度增量来确定位置的,是一种自主导航方法,保密性强。
但是随着时间推移会产生误差积累。
天文导航是通过仪器设备对天体的位置精确测定,根据地理关系算出位置的相对导航方法,其缺点是误差积累受时间和气象条件限制,定位时间长,操作计算复杂[1]。
惯性导航通过加速度测量技术和积分技术的综合应用得到运动体的速度和位置信息。
这种导航技术完全依靠载体上的设备自主完成导航任务,因此隐蔽性好,不受外界条件限制。
但是加速度及精度和误差积累严重限制该方法的应用。

军事交通学院(第三届亚军、第四届冠军)2012年11月24日,军事交通学院猛狮3号(JJUV-3)从北京台湖收费站出发,沿着京津高速一路飞奔,85分钟后安全到达天津东丽收费站。
根据国家自然科学基金委和北京理工大学有关专家现场宣布的测试结果,该无人驾驶智能车全程行驶114公里,最高时速105千米,共完成12次自主超车,36次换道操作,30次刹车操作。
“军交猛狮Ⅲ号”无人驾驶车到目前为止已经完成了一万多公里测试,最高时速曾达到120公里。
军事交通学院JJUV-3军事交通学院三代智能车国防科技大学(第三届冠军)我国从20世纪80年代开始进行无人驾驶汽车的研究,国防科技大学在1992年成功研制出我国第一辆真正意义上的无人驾驶汽车。
我国自主研制的无人车——由国防科技大学自主研制的红旗HQ3无人车,2011年7月14日首次完成了从长沙到武汉286公里的高速全程无人驾驶实验,创造了我国自主研制的无人车在复杂交通状况下自主驾驶的新纪录,标志着我国无人车在复杂环境识别、智能行为决策和控制等方面实现了新的技术突破,达到世界先进水平。
红旗HQ3无人车由国防科技大学自主研制,它从京珠高速公路长沙杨梓冲收费站出发,历时3小时22分钟到达武汉,总距离286公里。
实验中,无人车自主超车67次,途遇复杂天气,部分路段有雾,在咸宁还遭逢降雨。
红旗HQ3全程由计算机系统控制车辆行驶速度和方向,系统设定的最高时速为110公里。
在实验过程中,实测的全程自主驾驶平均时速为87公里。
国防科技大学方面透露,该车在特殊情况下进行人工干预的距离仅为2.24公里,仅占自主驾驶总里程的0.78%。
从20世纪80年代末开始,在贺汉根教授带领下,2001年研制成功时速达76公里的无人车,2003年研制成功我国首台高速无人驾驶轿车,最高时速可达170公里;2006年研制的新一代无人驾驶红旗HQ3,则在可靠性和小型化方面取得突破。
此次红旗HQ3无人车实验成功创造了我国自主研制的无人车在复杂交通状况下自主驾驶的新纪录,这标志着我国在该领域已经达到世界先进水平。
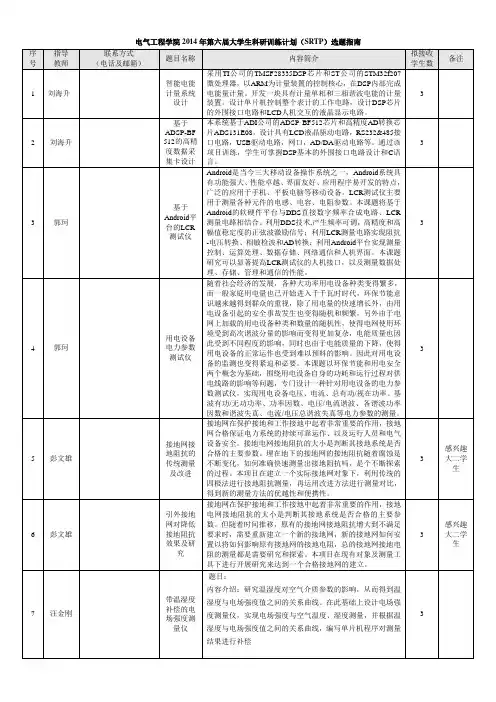
智能机器人实验室所需设备表智能机器人实验室所需设备表序数备设备名称规格及型号价格总价号量注ASURO智能车(AVR控制1 20 可编程器) 智能车 2 多功能智能车(51控制器) 20人形科研 3 17自由度人形科研机器人 5 机器人能力风暴智能机4 AS-UIII 2 器人大学版5 技术挑战赛平台擂台赛-技术挑战赛 3擂台赛-武术对抗赛 6 武术擂台赛平台 237马达固定件*2024马达固定件*20D4联轴器*20D5联轴器*207 机器人固定件 D6联轴器*20 1牛眼轮-万向轮*20机器人万向轮*20机器人智能车轮胎*20TT马达轮胎*208 履带底盘 10 机器人套件之底盘 9 越野基础车 30 10 AVR单片机核心板: 30 机器人套件 11 51单片机核心板: 30 之控制器 12 机器人扩展控制板:T-Bod 30Arduino学习板:13 30 Arduino-M两路直流电机驱动板:14 30 DMDML298N机器人套件之驱步进电机驱动器16细分15 30 动器 /3.5A:N-TB6560-T1 32路舵机驱动板:16 10 N-SerD32带测速的直流减速电机:17 50 EN-MotorI18 TT双出轴马达 50 机器人套件之马金属齿轮大扭矩舵机:达 19 50 MG995i1.8?步距角步进电机:20 30 17H150H-04A21 机器人显示套件 1602液晶模组:LCD1602M 50 22 ZIGBEE数据模组: 10 机器人套件之通讯 23 工业级无线速传模组 20机器人套件之角三轴加速度传感器模组:24 20 度/加速度 ADXL34525 CCD摄像头模组 10 机器人套件之 2.4G无线传输模拟摄像头26 10 摄像头模组模组27 GPS卫星定位模组:N-M89 10DDS数字频率合成模组:28 10 N-DDS9851红外避障传感器: 29 100 E18-D80NK-N黑白线检测色标传感器:机器人 30 100 E18-F10NK 套件之黑白线检测传感器:其他模组 31 100 TK-20-N32 凹槽光电开关 100 33 高精度凹槽开关并码盘 30 34 五通道黑白线寻迹模组 30 35 五通道灰度检测模组 30 36 教育型投影机 1 37 可移动电动银幕 1 38 计算机 30 39 音箱 1 多媒体设备 40 无线话筒 1 41 功放 1 42 黑板 1 43 交换机及机柜 1 44 电脑桌 30 45 讲台 1 46 焊接台及胶皮 1 47 家具凳子 90 48 学生作品展柜 4 49 元器件柜 2 50 工具柜 2 51 稳压电源 30 52 仪表工具小型钻台 2 53 万用表 50总计需说明的设备型号参数:序设备名称规格参数说明号1、通过编程实现智能车的自动控制,根据外部硬件完成寻迹、避障、转速测量、光源跟踪、红外遥控等功能;2、支持C/C++和图形化编程;3、无线下载程序模式,方便程序的下载;4、具有各类传感器,可以控制车的各种运动方式。
2008年全球智能型机器人发展研究与前景分析《2008年全球智能型机器人发展研究与前景分析》智能机器人技术是在新技术革命中迅速发展起来的一门新兴学科,它在众多的科技领域与生产部门中得到了广泛的应用,并显示出强大的生命力。
它是集精密机械、光学、电子学、检测、自动控制、计算机和人工智能等技术于一体,形成的一门综合性的新技术学科。
智能机器人按照智能化程度的高低,可以分为外部受控机器人,半自主机器人和全自主机器人。
从行业应用的角度来讲,机器人可分为工业机器人和服务娱乐机器人。
工业机器人包括工作在点焊、弧焊、喷漆、搬运、码垛等工业现场中的机器人。
在不同的应用场合下,又有水下机器人,空间机器人和农业、林业、牧业,医用机器人等。
按移动机器人的运动方式,机器人又可分为轮式移动机器人、步行移动机器人、履带式机器人、爬行式机器人和空气推进、水下推进等。
目前国际机器人界都在加大科研力度,进行机器人共性技术的研究,并朝着智能化和多样化方向发展。
《2008年全球智能型机器人发展研究与前景分析》报告是在中心机器人行业研究组课题研究成果基础上,结合对企业投资策略分析的基础上撰写而成,为企业把握整个行业发展技术、趋势以及选择基于趋势上的投资策略提供指导。
本报告主要面向智能清洁机器人相关企业,同时对研究产业发展规律、产业政策制定和欲进入的金融投资集团具有重要的参考价值。
(报告全文共七章94页,5万余字,其中图表56个,2008年7月出品)目录第一章概论 (1)第一节智能机器人的产生与发展 (1)一、机器人的发展概述 (1)二、智能机器人概述 (3)三、智能机器人的技术概述 (9)四、智能机器人的制造理论 (13)第二节智能机器人的体系结构 (16)一、分层递阶结构 (16)三、包容结构 (17)三、三层结构 (18)四、自组织结构 (19)五、分布式结构 (20)六、进化控制结构 (21)七、社会机器人结构 (23)第二章机器人的驱动技术 (25)第一节驱动装置的分类 (25)一、液压驱动器 (25)二、气压驱动 (25)三、电力驱动 (25)四、对驱动装置的要求 (26)第二节液压驱动装置 (27)一、实现直线运动的液压缸 (27)二、实现回转运动的液压马达 (28)三、闭环伺服控制系统 (29)第三节电机驱动装置 (33)一、步进电机: (33)二、直流伺服电机 (34)第四节气压传动 (36)第五节新型驱动器 (38)第三章机器人中的多传感器信息融合技术 (39)第一节多传感器信息融合的概念 (39)第二节多传感器信息融合的基本原理 (40)第三节多传感器信息融合的结构 (41)第四节机器人中的传感器融合技术 (42)第四章机器视觉 (45)第一节图像的获取 (45)一、照明 (45)二、图像聚焦形成 (46)三、图像确定和形成摄像机输出信号 (46)第二节图像的处理 (47)一、图像的增强 (47)二、图像的平滑 (47)三、图像的数据编码和传输 (47)四、边缘锐化 (48)五、图像的分割 (48)六、图像的识别 (48)第五章运动规划与控制技术 (49)第一节智能控制理论基础 (49)一、智能控制的性能 (49)二、智能控制的特点 (49)第二节智能机器人的运动规划 (51)一、概述 (51)二、规划问题的形式化描述 (52)三、规划算法的评价标准 (53)四、通用运动规划方法分类、比较及研究进展 (53)第三节智能机器人的控制技术 (64)第六章智能机器人系统实例 (65)第一节室外智能移动机器人 (65)一、智能移动机器人的发展及典型系统 (65)三、室外智能移动机器人研究中的关键技术 (70)第二节双足步行智能机器人 (74)第三节球形机器人 (76)一、概况 (76)二、国外发展情况 (76)三、国内的情况 (84)四、球形机器人的发展趋势 (86)第四节仿鱼机器人 (90)一、开发研究的开端 (90)二、弹性振动翼推进系统的开发 (90)三、仿鲷鱼机器人的开发 (90)四、仿空棘鱼机器人的开发 (91)五、完整的游动系统 (91)第七章智能机器人的发展趋势 (92)表5.1 基于自由空间几何分解的基本规划算法性能对照表 (56)表5.2 前向图搜索算法性能对照表 (58)表5.3 基于随机采样的运动规划方法性能对照表 (62)图1.1 ROBOCUP智能移动机器人 (10)图1.2 ROBOCUP机器人系统架构 (12)图1.3 分层递阶结构 (17)图1.4 包容结构 (18)图1.5 三层结构 (19)图1.6 自组织结构 (20)图1.7 分布式结构 (20)图1.8 进化控制结构 (22)图1.9 社会机器人的结构 (23)图2.1 实现直线运动的液压缸工作原理 (27)图2.2 单活塞杆液压缸结构图 (28)图2.3 叶片式液压马达工作原理图 (28)图2.4 叶片式液压马达结构图 (29)图2.5 液压伺服系统原理图 (29)图2.6 用伺服阀控制液压缸简化原理图 (30)图2.7 信号类型 (31)图2.8 喷嘴挡板阀结构示意图 (31)图2.9 喷嘴挡板阀结构示意图 (32)图2.10 步进电机工作原理图 (33)图2.11 三相步进电机结构图 (34)图2.12 直流电机结构示意图 (34)图2.13 直流伺服电机工作原理图 (35)图2.15 气动系统 (36)图2.16 无杆汽缸的结构 (36)图2.17 叶片式气动马达的结构 (37)图3.1 多传感器融合示意图 (40)图3.2 串联结构 (41)图3.3 并联结构 (42)图3.4 多传感器信息融合自主移动装配机器人 (43)图6.1 CMU的Nav Lab-5移动机器人系统 (67)图6.2 THMR-V机器人测控系统框图 (69)图6.3 正在研制中的清华大学THMR-V机器人 (69)图6.4 智能移动机器人的控制体系结构 (70)图6.5 双足步行智能机器人结构和自由度分配 (74)图6.6 Spherical mobile robot结构 (77)图6.7 Spherical mobile robot三维图 (78)图6.8 “Spherical”图片 (79)图6.9 Spherical Pro/E三维图 (80)图6.10 Spherical rolling robot模型 (81)图6.11 August内部驱动系统 (81)图6.12 轮辐的结构 (82)图6.13 球形机器人原型 (82)图6.14 IDU-5的三维模型 (83)图6.15 Roball的原型 (83)图6.17 球形机器人实物及内部结构图 (85)图6.18 球形运动器实物图 (86)图6.19 Sony Robot的原型 (87)图6.20 Hopping Robot的原型 (88)图6.21 Sony Robot的原型 (88)图6.22 Sony Robot的原型 (89)图6.23 柔性腿式机器人机构草图 (89)。
基于机器视觉的A柱死角障碍物位置的估测【摘要】汽车a柱死角是汽车行驶过程中驾驶员无法看到的前方区域,针对改区域障碍物位置的检测,提出应用机器视觉技术,通过计算障碍物的面积和中心位置得出障碍物的图像特征,然后引入bp神经网络进行估测。
实验结果表明该方法能取得较高的估测精度。
【关键词】a柱视角;机器视觉;障碍物位置智能车辆领域的研究重点是使用机器视觉技术来理解道路环境信息,通过分析和理解周围环境信息实现智能车辆的安全辅助驾驶成为汽车电子的重要发展方向[1]-[5]。
在已有研究中,针对汽车a 柱死角的研究较少,实际上a柱死角是汽车事故的主要原因之一,因此a柱死角障碍物检测成为安全辅助驾驶的重要组成部分。
机器视觉对于道路环境依赖小,不需要辅助设备,因此可以考虑引入机器视觉技术进行a柱死角障碍物的位置估测。
1. 图像特征的提取在采集了道路信息后,一般首先将道路图像中的障碍物提取出来。
通过图像注意得到障碍物在图像中的区域信息,然后通过图像分割提取障碍物,一般最后得到的二值图像。
如图1所示,图中黑色的区域一般对应障碍物,白色的区域对应背景。
图 1 障碍物二值图像显然,由于光照等其他环境因素的影响,在提取障碍物的过程中存在一定的误差。
如图1所示,图中在障碍物右侧存在一条黑色的虚线,这就是将一些道路背景信息提取为障碍物。
为了估测障碍物在实际空间的位置信息,首先要根据这样的二值图像提取相应的特征,而在提取这些特征中必须考虑到这样的误差存在,不能因为这些分割误差使得特征值出现较大幅度的波动。
从大量实验中可以发现,这样的误差相对障碍物面积较少,因此可以考虑提取二值图像中黑色像素点的个数表示障碍物的面积。
这样的面积由于摄像头视角的原因必然存在一定的误差,但是一般说来这样的误差影响不大。
另外可以考虑引入所有黑色像素点的x 轴和y轴中心坐标点进行障碍物位置的估测。
2.基于bp神经网络的障碍物估测算法由于图像处理过程中的误差使得障碍物的特征值存在一定波动,另外由于视角的关系,一般道路图像都能够看到障碍物不只一个表面,而多个表面在二值图像中并不存在差异。
室外智能移动机器人运动方向测量系统
马明山;何克忠
【期刊名称】《电子技术应用》
【年(卷),期】1997(023)004
【摘要】在导航控制技术中,机器人运动方向的测量是相当关键的。
针对国内外
各种载体运动方向测量系统的特点,本文提出了一种利用磁罗盘传感器组成的室外移动机器人运动方向测量系统,该系统反应灵敏,测量精度高,性能稳定,成本低。
【总页数】2页(P9-10)
【作者】马明山;何克忠
【作者单位】武汉华中师范大学电子与计算机研究所;北京清华大学
【正文语种】中文
【中图分类】TP242.6
【相关文献】
1.室外移动机器人自主充电系统研究 [J], 黎阳生;惠淼丽;谢业海;吕赟
2.一种基于视觉补偿的移动机器人地图匹配室外定位算法 [J], 李修云;梁山;赵聃敏
3.室外移动机器人的组合导航定位系统设计 [J], 吴平;张海
4.移动机器人室外环境分级地形分类与参数估计 [J], 钟晨;王伟
5.面向室外移动机器人的雷达–图像跨模态检索 [J], 张凯;刘华平;邓晓燕;马晓健;张新钰
因版权原因,仅展示原文概要,查看原文内容请购买。
移动机器⼈THMR-V的组合定位系统
移动机器⼈THMR-V的组合定位系统
张军宇;何克忠
【期刊名称】《计算机⼯程与应⽤》
【年(卷),期】2001(037)015
【摘要】定位系统是室外移动机器⼈中不可缺少的组成部分,是车辆定位与导航的基础.⽂章介绍了清华移动机器⼈THMR-V的定位系统,它是由GPS、磁罗盘、光码盘组成的.GPS能够提供⽐较精确的绝对位置,但是采集数据较慢,⽽且可能由于遮挡等原因⽽失效或跳变.磁罗盘-光码盘系统(CEPS)通过航位推算计算车体位置,在短期内定位效果较好,但是存在积累误差.通过GPS/CEPS组合定位,取长补短,从⽽整体上达到良好的性能.在THMR-V上经过⼀年多试验证明,该系统具有较⾼的准确性和稳定性,满⾜移动机器⼈的定位与导航的需要.
【总页数】4页(68-71)
【关键词】移动机器⼈定位系统磁罗盘光码盘 GPS 组合定位
【作者】张军宇;何克忠
【作者单位】清华⼤学计算机科学与技术系;清华⼤学计算机科学与技术系
【正⽂语种】中⽂
【中图分类】TP242
【相关⽂献】
1.室外移动机器⼈的组合导航定位系统设计 [J], 吴平; 张海
2.基于双⽬视觉信息融合的移动机器⼈避障研究基于双⽬视觉信息融合的移动机器⼈避障研究 [J], ⾕凤伟; ⾦西虎; 姜珊
3.移动机器⼈导航控制研究的重要进展——评专著《未知环境中移动机器⼈导。
毕业设计开题报告测控技术与仪器基于超声波技术的避障系统设计1选题的背景、意义目前,智能设备技术是世界上最热门的研究领域之一,很多成熟的智能化产品已经在不同领域得到广泛的应用。
伴随着智能化技术普遍涉及自动控制、电子技术、计算机、传感器和机械工程等学科技术的飞速发展,伴随着社会发展的需要,智能技术的应用环境和功能任务越来越复杂,采用的新理论、新方法、新技术也越来越多。
近年来,在科学研究、紧急抢救、生产制造等生产生活中时常会碰到一些因为有一定的危险性或其它原因而使人类所不能做到的事或不能到达的地方,这就需要借助于一些智能化设备。
在智能设备的移动过程中免不了会遇到各种障碍物,这就要求设备能自动并且及时的避开这些障碍物。
所以,关于自动避障的研究就自然而然的产生了。
随着先进技术和传感器的发展与应用,移动的智能化设配的应用越来越多方面,其研究领域也越来越广泛。
自动避障的实现方法各种各样,其使用的传感器主要有超声波传感器、红外线传感器、激光传感器等。
目前,超声避障实现方便、计算简单、易于做到实时控制,并且在测量精度方面能达到实用的要求,因此成为常用的避障方法[3]。
移动智能化设配涉及到机械、控制、传感器、计算机、人工智能与网络等多个领域,是多种先进技术发展的综合体。
因此,众多学科的发展都能不断带动智能化设配的发展。
随着微处理器技术、网络技术、传感器技术的不断进步,智能化设配作为一种功能强大、应用广泛的多技术融合体,渐渐地步入人们的视野[9]。
国内外的很多科研人员正热衷于智能化设配的开发与研究。
自主避障就是在没有人的干预下使机器人有目的地移动,发现并自动避开途中的障碍物,完成指定任务和操作。
设配通过装配的信息获取手段,获得外部环境信息,实现自我定位,判定自身状态,规划并执行下一步的动作[10]。
它可以使设配的本体以及重要零部件不被损坏,使设配在任何环境下都能够正常且顺利的完成给定的任务。
在国际上,智能化设配的研发程度已经很高,其智能化的水平也在不断提高,很多公司和机构已推出了成熟的智能化机器人产品或样机。
SLAM的应用领域自同时定位与地图构建被意识到并提出有严密数学基础的方案起,在很多领域被成功地工程实现和应用。
比如,外星球探索[4–7],采矿自动化与安全[8–11],水下探测与深海勘探[1, 2, 12–14],无人机导航与自治[15–17]以及灾难现场搜寻与营救[18–20]。
在这些对环境缺乏先验知识的场合,同时定位与地图构建的引入是实现移动机器人自治的唯一手段,它使移动机器人能够估计自身方位和周围环境特征的方位和几何轮廓,进而合理决策与规划动作和路径。
在民用领域,同时定位与地图构建可使移动车辆在GPS无法正常工作的环境下实现定位[21–24],并追踪辨识动态车辆与行人[3, 24, 25],为实现智能避障,辅助驾驶和自导航提供了可能。
陆地自主车(ALV: Autonomous Land Vehicle)之一是移动机器人重要应用领域,2005年美国国防部高级研究计划局(DARPA)举办的Grand Challenge比赛,由著名专家S.Thrun领导团队开发的Stanley自主车[26]仅用不到7小时完成了142英里的自主行使任务。
我国对地面智能移动机器人的研究起步较晚,但是也取得了很大的进展[27]。
20世纪80年代末,国家“八六三”计划自动化领域智能移动机器人主题确定立项进行遥控驾驶的防核化侦察车的研制;几乎同时国家部分部委也在规划“八五”预研中的智能移动机器人技术研究。
真正取得突破性进展的是“八五”期间研制成功的我国第一辆样车ATB-1(Autonomous Test Bed-1),该车由南京理工大学、国防科技大学、清华大学、浙江大学和北京理工大学联合研制。
在19%年演示中,该车各项性能都达到了较高的标准;在“八五”的基础上,我国在“九五”期间研制了第二代自主地面车ATB-2;到目前为止,第三代自主车已经研制成功,并已通过鉴定,现在正在进行第四代的自主车的研制工作。
另外,国内具有代表性的系统还有: 清华大学研制的THMR-v[28],国防科技大学研制的CITA VT-IV[29]及其与中国一汽合作研究的“红旗”自主轿车,吉林大学研制的JLUIV系列实验车[30]以及西安交通大学研制的Springrobot实验车[31]等。
摘要智能作为现代社会的新产物,是以后的发展方向它可以按照预先设定的模块在一个特定的环境里自动的运作,无需人为管理,便可以完成预期所要达到的或更高的目标。
本文设计是基于AT89s52微处理器的机器人车体系统和XL02—232AP1微功率无线透明传输模块的无线通信系统,以此实现小车的前进、后退、停止、及直角特别是圆弧形拐弯,本设计主要体现多功能小车的智能模式,设计中的理论方案、分析方法及特色与创新点等可以为自动运输机器人、采矿机器人、家用自动清洁机器人,特别是智能足球机器人的设计与普及有一定的参考意义.同时小车可以作为玩具的发展方向,为中国玩具市场技术含量的缺乏进行一定的弥补,实现经济收益,形成商业价值。
关键词:单片机,智能小车,AT89s52,XL02-232AP1ABSTRACTAs a new product of modern society,intelligence is the trend in future development.It can work in some specific environment according to the mode which sets in advance。
Dispensing with behavior adjustment management,but it can achieve the expected,even higher goal.This design is based on the robot body AT89s52 microprocessor system and XL02-232AP1 transparent micro—power wireless transmission module of the wireless communication system,to achieve the car forward, backward,stop, especially the arc-shaped bend at right anglesThe design mainly reflected a smart-car model,The theoretical scheme,analysis method,uniqueness and innovation etc.that pointed in this paper,I think they are will be certain reference value in design an popularity of automatic or semi—automatic robot such as automatic transportation robot,prospecting robot,cleaning household robot,especially intelligent socce r robot。
摘要本文详细叙述了对两轮电磁寻迹直立智能车的运动控制设计过程。
随着科技技术迅猛发展和生活水平的提高,人们对于汽车的安全性、方便性要求也越来越高。
智能车辆的使用可以改善道路安全状况,提高道路的利用率。
对于智能汽车的传感技术和数据分析技术的研究能够有效地提高智能汽车对于复杂环境道路的通过性,从而让智能车的运用能够更加方便、快捷、安全的为我们服务。
“飞思卡尔智能车竞赛”是由教育部主办的全国大学生智能汽车竞赛,目前已经成功举办了六届。
该竞赛根据传感器的不同分别设立了:光电组,电磁车组和电磁组。
本文主要研究的是两轮寻迹电磁智能车。
两轮电磁寻迹直立智能车的原理是通过电磁传感器采集赛道信息,同时电子陀螺仪和加速度传感器采集直立智能车的当前车身信息,再交由单片机对路况信息进行识别、分析和信息处理,最后再交由单片机给出控制信号来控制车的双电机让小车在保证直立的状态下沿着指定路线行驶。
在工作中主要用到的编程环境使比赛组委会提供的CodeWarrior。
设计过程主要运用了汇编语言和单片机的相关知识以及PID控制算法。
关键词:智能车;单片机;两轮循迹直立电磁车;PID;陀螺仪;加速度传感器AbstractThis paper illustrate details of the design process of the upright two electromagnetic tracing smart car's motion control . With the rapid development of science and technology and the improvement of living standards,people's requirements of vehicle safety, convenience become higher and higher. The use of intelligent vehicles can improve road safety conditions and the utilization of the road. To study the smart car by testing sensing technology and data analysis techniques can effectively improve its ability for passing complex environment of the road , so that the use of smart cars can be more convenient, faster and safer for our services.Freescale Smart Car Competition "organized by the Ministry of Education of the National Smart car race has already hold for 6 sessions. The contest was set up according to the different sensors: photoelectric group, camera group and electromagnetic group. This paper studies the two tracing electromagnetic smart car.The principle of two electromagnetic tracing upright to intelligent vehicles is to track information collected through electromagnetic sensors, electronic gyroscopes and acceleration sensors collect current body upright smart car, then the microcontroller on the traffic information to the identification, analysis and information handling. Finally, the microcontroller gives the control signal to control the car motor car traveling along the designated route in the state to ensure vertical. The programming environment primarily used in the work so that the competition provided by the organizing committee of the CodeWarrior. The design process is the main use of assembly language and knowledge of the microcontroller and the PID control algorithm.Keywords: Smart car; microcontroller; two tracking upright electromagnetic vehicle; the PID; gyroscope; accelerometer.摘要 (1)Abstract (2)第一章绪论 (5)1.1 国外的发展趋势 (6)1.2 国内发展 (7)1.3 电磁循迹直立智能车的比赛特点 (7)1.4 课题意义 (9)1.5 本课题研究主要内容 (10)第二章电磁寻迹直立智能车的系统构建 (11)2.1 电磁寻迹原理 (11)2.2 电磁直立循迹智能车总体构成 (13)2.3 功能模块介绍 (14)2.3.1 加速度传感器 (14)2.3.2 电子陀螺仪 (17)2.3.3 电磁传感器 (18)2.3.4 编码器 (19)2.3.5 电机驱动电路 (20)第三章电磁寻迹直立智能车智能软件系统的设计 (21)3.1 智能控制概论 (21)3.1.1 模糊控制 (21)3.2 系统辨识的基本概念 (23)3.3 车直立系统的设计 (24)3.3.1 平衡思想 (24)3.3.2 直立系统中具体的控制过程 (25)3.4 采样方法和采样间隔的选择 (29)3.4.1 电磁传感器采样选择 (30)3.5 路径检测算法的设计 (30)3.6 路径算法的优化处理 (30)3.7 车行驶中直立控制策略 (31)3.8 两轮车转向系统设计 (31)3.9 PID控制 (33)3.9.1 不完全微分PID (34)3.9.2 微分先行PID (35)3.9.3 前馈控制的应用 (36)3.9.4 在速度控制中的应用 (37)3.10 调速控制策略与行车车速优化策略 (38)3.11 底层设置 (38)第四章调试说明 (38)4.1 调试策略及步骤 (38)4.1.1 调试参数 (38)4.1.2调试条件 (39)4.2 调试经验总结 (41)第五章总结与展望 (41)参考文献 (42)第一章绪论随着现代高新技术的迅速发展,信息化和智能化越来越多的应用到人类社会的生产、生活的各个方面,曾经只能在科普小说中看到的智能汽车已经不再是虚幻的,人们在不久的将来将能在现实中看见智能汽车。
文章编号 2 2 2多功能室外智能移动机器人实验平台)ΤΗΜΡ−ςΞ张朋飞何克忠欧阳正柱张军宇清华大学智能技术与系统国家重点实验室北京摘要 本文介绍了清华大学智能技术与系统国家重点实验室研究开发的多功能室外移动机器人实验平台× 2∂ 以及× 2∂的体系结构和部分功能关键词 移动机器人 临场感 遥控中图分类号 ×° 文献标识码ΜΥΛΤΙΦΥΝΧΤΙΟΝΑΛΙΝΤΕΛΛΙΓΕΝΤΟΥΤΔΟΟΡΜΟΒΙΛΕΡΟΒΟΤΤΕΣΤΒΕΔ ΤΗΜΡ−ς° 2 ∞ 2 ≠ 2 ∏ ∏ 2 ∏ΤσινγηυαΥνιϖερσιτψΣτατεΚεψΛαβορατορψοφΙντελλιγεντΤεχηνολογψανδΣψστεμσΑβστραχτ × ∏ × 2∂ ∏ ∏ ∏ √ × ∏ √Κεψωορδσ1引言 Ιντροδυχτιον现代电子技术!计算机软!硬件技术!人工智能技术!模式识别技术!自动控制技术的飞速发展 促进了室外移动机器人导航!控制技术的进步和功能的增多 随着国际间高科技领域竞争的日益激烈 多功能室外移动机器人必将会在各行各业得到广泛应用 如今在军事应用领域 室外机器人被寄予替代人类自动执行某些日常性与危险性军事任务的厚望 比如在军事场地巡逻!侦察!和监视以及在生物!化学!核试验场作业等 而在高速公路上利用视觉信息识别行车道实现自动驾驶或辅助驾驶又是当前国际国内移动机器人研究领域和智能交通系统研究领域的热门研究方向 作为科研机构 开发一种能适应各种环境 满足多种要求的多功能室外移动机器人实验平台势在必行 在这种科研背景下 清华大学智能技术与系统国家重点实验室智能移动机器人课题组在由国防科技预研九五重点项目/地面军用智能机器人2临场感遥控系统0资助下 与国防科技大学!南京理工大学!浙江大学!北京理工大学合作研究地面军用智能移动机器人的同时 又在国家高技术研究发展计划 计划 项目/智能机器人关键技术)基于多传感器的智能决策与控制技术的研究0和/基于多传感器信息融合的室外移动机器人监督式导航技术的研究0的资助下 独立开发了多功能室外智能移动机器人实验平台× 2∂目前× 2∂已经具备了以下功能#校园道路网环境中的低速!中速全自主行驶#校园网道路环境中的临场感遥控驾驶#高速公路车道分界线的快速视觉检测#高速公路环境中的部分辅助驾驶工作#校园网道路环境中的侦察 与清华大学智能与系统国家重点实验室多媒体交互与媒体集成分室合作× 2∂研究的近期目标#高速公路环境中的全自主行驶#实现在校园道路网环境中基于视觉的监控下半自主行使× 2∂研究的远期目标#结合智能交通系统的研究 增强!增多在高速第 卷第 期 年 月机器人ΡΟΒΟΤ∂Ξ收稿日期公路环境中的辅助驾驶功能#其他功能2ΤΗΜΡ−ς的硬件体系结构 ΗαρδωαρεσψστεμαρχηιτεχτυρεφορΤΗΜΡς× 2∂是在清华大学/八五0期间自主开发的室外移动机器人实验平台× 的基础上研究开发的 × 2∂继承了× 中的一些成熟的关键技术 如光码盘)磁罗盘组合定位!差分 °≥ 全球定位系统 定位⁄ °≥!路径跟踪技术!车体控制技术等 但对整个车体的体系结构和系统集成方式作了改进与完善 并增添了临场感遥控驾驶!侦察!高速公路中的自主驾驶和辅助驾驶等功能以及相应的软!硬件模块 图 所示为× 的硬件体系结构 图 为× 2∂的体系结构 从图 与图 的对比可以看出 与× 相比 × 2∂不仅将× 中的双端口 改为 以太网 将超声传感器阵列改为激光雷达 而且增添了无线数据通讯!声像采集!发射!摄像机云台控制!远Ù近距视觉处理等子系统图 × 2®的硬件体系结构ƒ ∏ × 2®× 2∂采用了光码盘!电磁罗盘和⁄ °≥组合定位的方式 与其他的定位方式相比 这种组合定位方式性能价格比高 定位精度达到了 满足× 2∂完成各种任务的需要× 2∂的车体控制系统可以接受两种格式的驾驶控制命令 自主行驶时 接受监控系统发出的/速度Ù停车Ù驾驶角0命令 遥控驾驶时 接受指挥站发出的/油门Ù刹车Ù驾驶角0命令 × 2∂通过一块≤ 步进电机驱动卡驱动 个电机 分别控制油门踏板!刹车踏板和方向盘 控制周期为 保证了× 2∂的机动性和控制精度要求× 2∂通过无线数据通讯计算机与临场感遥控驾驶系统的指挥站交互信息 信息的传输是经由两条 的无线数据通讯链路实现的 无线数据通讯计算机还负责车载摄像机云台的控制 使云台随着临场感遥控系统指挥站操作员的头部同步转动 云台上安装了两台同型号!同参数的摄像机摄像机摄取的视频信号与安装在车体左右两边的拾音器采集的音频型号输入到两个电视信号发射机 再经过双工器合成后由全向天线发出× 2∂的体系结构是一种柔性的体系结构不同的子系统的组合以及车体控制系统的两套驾驶命令接收接口使× 2∂不需改变软硬件系统就能方便的完成多种任务3 ΤΗΜΡ−ς在校园网道路环境中的自主行驶 ΤΗΜΡςΑυτονομουσμοϖεμεντινχαμπυσροαδνετωορκενϖιρονμεντ在一些军事实验场地或某些大型仓库 由于场地面积一定以及场地内道路格局基本固定 因此可以事先获得环境的详细信息来生成数字电子地图和地理环境信息数据库 数字电子地图可以直观描述环境的外部面貌 地理环境信息数据库可以提供深层次的环境信息 只要能够实时获得在环境中的位机 器 人 年 月置!姿态信息以及车体前方的道路信息 机器人就可以在环境中低速!中速自主行驶图 × 2°的硬件体系结构ƒ ∏ × 2°我们以清华大学的校园网道路环境模拟上述军事实验场地环境 建立了清华大学的数字电子地图 并在清华中央主楼前成功实现了× 2∂的自主行驶 目前我们采用直接在数字电子地图上标出规划点的方式生成任务规划 × 2∂跟踪给定任务中的规划点 在跟踪过程中根据车体前方静态!动态障碍物的信息实时实施避障或停障措施 并根据不同路段自动切换到不同的导航模式 最终到达任务规划中的最后节点今后我们将采用一种全新的任务给定方式 操作人员在临场感遥控驾驶系统指挥站给出× 2∂的目标点作为任务 目标点的信息经无线数据通讯链路发送到× 2∂ × 2∂收到目标点的信息后 以当前车体所在位置为出发点 在环境道路网中搜索一条从出发点到目标点最优路径并自动生成路径规划 然后进行路径跟踪 这种下达任务的方式符合实际需求 目前 × 2∂在校园网道路环境中曲线路段自主行驶的速度可以达到 ∗ 米Ù小时 在直线路段行驶时 我们限制最高速度为 米Ù小时 以保证行人安全4 ΤΗΜΡ−ς在校园网道路环境中基于视觉的监控下半自主行驶 ΤΗΜΡςΣεμι−αυ−τονομουσμοϖεμεντβασεδονϖισιονσυ−περϖισιονινχαμπυσροαδνετωορκενϖι−ρονμεντ基于视觉的监控下半自主行驶是介于全自主行驶与遥控驾驶之间的一种移动机器人导航控制方式 车体行驶前 首先摄取一幅前方道路的图像并经无线视频通讯链路将该图像发送到临场感遥控驾驶指挥站 指挥站操作人员根据接收到的道路图像进行判断 然后用鼠标在图像平面坐标系中画出车体第 卷第 期张朋飞等 多功能室外智能移动机器人实验平台)× 2∂的行驶路径 指挥站系统根据操作人员画在图像平面坐标系中的路径生成车体在车体坐标系中的规划点 并将规划点信息经无线数据通讯链路发送到车体 × 2∂接收到规划点信息后开始跟踪这些规划点 当车体到达最后一个规划点后 再摄取道路图像并发送回指挥站 然后接收指挥站发出的规划点并跟踪 如此周而复始 最终完成给定任务5 ΤΗΜΡ−ς在校园网道路环境中的临场感遥控驾驶 ΤΗΜΡςΣιτερεμοτεχοντρολοπερατιονινχαμπυσροαδνετωορκενϖι−ρονμεντ在某些复杂环境中 尽管建立了数字电子地图和详尽的地理信息 但由于环境的复杂性!任务需求的特殊性以及机器人的某些局限性 仅仅依靠机器人的自主行驶并不能圆满完成给定的任务 这时就需要结合人类无与伦比的智能性 由操作人员远程遥控机器人的行驶 基于这种目的 我们研究开发了临场感遥控驾驶系统 临场感遥控驾驶系统由移动站子系统和指挥站子系统组成 移动站子系统作为× 2∂硬件体系的一部分的已经在本文第 节介绍过 指挥站的软硬件结构如图 所示图 临场感遥控驾驶系统指挥站软!硬件结构示意图ƒ ≥ 2 ∏2 √指挥站接收到移动站发回的× 2∂现场的视频!音频信息后 合成为立体图像和立体声音 指挥站的操作人员通过立体眼镜观看大屏幕显示器的立体图像 具有与坐在× 2∂驾驶室里一样身临其境的感觉 操作人员操纵模拟驾驶台产生驾驶命令 下位机实时采集驾驶命令并由数据无线电台传输给移动站来控制× 2∂的行驶 同时采集操作人员所戴头盔的转角 一边直接控制投影仪云台 一边将转角信息发送到移动站控制× 2∂车载摄像机云台 使摄像机云台!投影仪云台随着指挥站操作人员头部的转动而同步转动执行任务过程中 × 2∂通过数据电台向指挥站发送车速!位置等车况信息 指挥站将接收到的车况信息和一路视频信号投影到柱面大屏幕 供指挥站其他工作人员观看参考 年 月 我们研制的临场感遥控系统与清华大学!国防科技大学!浙江大学!南京理工大学!北京理工大学共同研制的军用地面智能移动机器人进行了联调 遥控驾驶速度可机 器 人 年 月达 公里Ù小时 并顺利通过了总装备部的验收6ΤΗΜΡ−ς在高速公路中的高速自主行驶 ΤΗΜΡςΑυτονομουσμοϖεμεντωιτηηιγησπεεδινεξπρεσσωαψ高速公路是一种高度结构化的道路 具有车速高!通行能力大!有 条以上的车道!设中央分隔带 采用立体交叉!全部或局部控制出入等特点 此外 还具有很高的路线技术标准和永久性的路面结构!必要的道路标志 安全设施!自动化的信号系统和完善的照明设备等 我国规定平原地区高速公路的极限最小平曲线半径为 米 最大纵坡度为 β 以上特点使得汽车在高速公路中实现无人驾驶成为可能 以美国≤ !德国的 为代表的国外科研机构早已开始了这方面的研究 并分别取得不俗的成果 据报道我国的国防科学技术大学也已经利用飞机场跑道模拟高速公路进行过类似实验 根据高速公路的特征 我们提出了采用远Ù近距双目视觉系统导航的方式 × 2∂根据远距摄像机采集的车体前方 ∗ 米内的道路图像提取道路方向变化信息来控制车体的速度 通过近距摄像机采集车体前方 ∗ 米内的道路图像提取车体相对于行车道的位置!方向信息控制车体的方向 图 为× 2∂在高速公路中车道线检测与道路跟踪流程示意图图 车道线检测与跟踪算法流程图ƒ ×目前我们已经完成了多种高速公路车道线检测的快速算法 采用° ∏ 计算机 内存 ¬ 图像采集卡 采集标准≤≤ 灰度视频信号 将图像压缩为 ≅ 像素 处理速度可以达到 ∗ 帧Ù秒 能够满足机器人在高速公路高速自主行驶的要求由于实地做高速公路中的高速自主行驶的实验比较困难 目前我们只做了有关的理论研究和仿真验证7结论 Χονχλυσιον本文介绍了多功能室外移动机器人实验平台× 2∂以及目前× 2∂所具备的功能 今后的研究是继续完善其临场感遥控驾驶功能和在高速公路上的自主行驶和辅助驾驶功能 并将在× 2∂研制过程中获得的关键技术应用于其他领域参考文献 Ρεφερενχεσ艾海舟 张朋飞 何克忠 张军宇等 室外移动机器人的视觉临场感系统 机器人 22张朋飞 艾海舟 何克忠 高速公路车道线的快速检测跟踪算法 机器人 21作者简介张朋飞 2 男 博士研究生 研究领域 临场感遥控系统 视觉导航系统何克忠 2 男 教授 研究领域 移动机器人 计算机控制技术第 卷第 期张朋飞等 多功能室外智能移动机器人实验平台)× 2∂。