(2)函数生成机构综合 该综合要求 连杆机构的输入和输出构件间的位移 关系满足预先给定的函数关系。
(3)轨迹生成机构综合 该综合要 求机构中连杆上某点沿给定的轨迹运 动。
如图所示轧辊机构
连杆机构综合所用的方法有解析法和几何法。解析法根据运动学 原理建立设计方程,然后解析求解或用计算机求数值解。几何法应 用运动几何学的原理作图求解。
示刚体上一个矢量由位置v1,绕原点旋转a角到位置v2 。两者的关系为
由于Z轴不变,上式写成矩阵
简化记为:
前面公式的意义:在于知道刚体第一个位置的坐标后,可以用第一 个位置的坐标和转角,来表示刚体转动后的坐标。
二,刚体平面运动的一般情况(转动+移动)
如图所示,平面上某刚体由初始位置 运动
到末位置 。该一般位移可以分解为随同基点的
例5-1 已知连杆的三个位置,即连杆上P点的三个位置及连杆的两个转角:
=
试综合该四杆导引机构。 素.
cos0
D12 sin0
0
sin0 cos0
0
2 cos0 1sin0 0.5sin0 1cos0
1
10 1 0 1 0.5
00 1
cos0
D12 sin0
0
sin 0 cos0
0
2cos0 1sin0 0.5sin0 1cos0
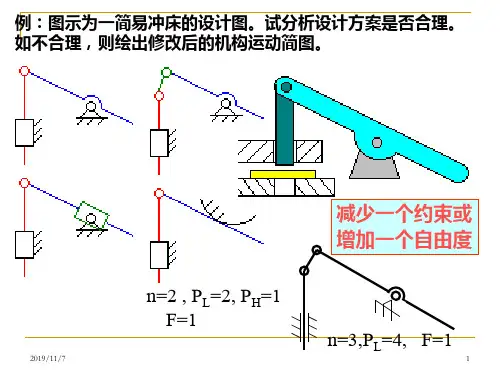
曲柄存在准则:最短杆与最长杆之和≤其余两 杆长度之和;
在此条件下,取最短杆或与最短杆相邻接的构 件作机架,必有曲柄。 (2)运动连续性准则
(3)运动的顺序准则
平面机构运动综合中,应符合规 定的运动顺序要求。
(4)传力准则
机构的最小传动角≥40°。
5-2 刚体位移矩阵
一、刚体绕坐标原点的旋转矩阵 刚体上的一个矢量就能完全确定此刚体在平面中的位置。图5-3表