射影的有关概念及定理
- 格式:ppt
- 大小:816.50 KB
- 文档页数:8

射影定理简单记忆射影定理(Projection Theorem)是线性代数中的重要定理之一,它在向量空间中描述了向量的投影。
射影定理不仅具有理论上的重要性,也在实际问题中应用广泛。
本文将对射影定理进行简单记忆。
一、射影定理基本概念在介绍射影定理之前,我们需要了解一些基本概念。
1. 向量空间向量空间是指由一些向量组成的集合,满足加法和数乘运算,并且具有一些额外的性质。
在向量空间中,向量可以进行线性组合和线性相关的操作。
2. 投影向量在向量空间中,对于给定的一个向量b和一个子空间W,投影向量是指与向量b最为接近的子空间W中的向量。
3. 正交补空间在向量空间V中,对于一个子空间W,正交补空间是指与W中的所有向量正交的向量组成的空间。
正交补空间与W的维度之和等于整个向量空间V的维度。
二、射影定理的表述射影定理可以描述为:对于向量空间V中的一个子空间W,任意一个向量b都可以唯一地表示为投影向量p和正交向量w的和,即b = p + w,其中p是W中的向量,w是W的正交补空间中的向量。
三、射影定理的应用射影定理在实际问题中有着广泛的应用,下面列举几个例子:1. 图像处理在图像处理中,射影定理被用于图像的降噪和压缩。
通过将图像表示为投影向量和正交向量的和,在压缩图像时可以舍弃一部分高频分量,从而减小图像文件的大小。
2. 数据分析在数据分析中,射影定理被用于主成分分析(PCA)技术中。
主成分分析是一种降维技术,通过将原始数据投影到一组正交基向量上,可以减小数据的维度并保留大部分的信息。
3. 信号处理在信号处理中,射影定理被用于信号的去噪和滤波。
通过将信号表示为投影向量和正交向量的和,可以滤除一些噪声成分,从而提高信号的质量。
四、射影定理的证明射影定理的证明可以基于向量的线性相关性和线性无关性,具体的证明过程较为复杂,超出本文的范围。
感兴趣的读者可以参考相关的线性代数教材或者学术文献进行进一步研究。
五、总结射影定理是线性代数中的重要定理,它描述了向量在向量空间中的投影。
射影定理的概念在数学中有两种不同的表述,分别对应于初等几何和代数几何两个不同领域。
1. 初等几何中的射影定理:
在平面几何中,尤其是直角三角形的背景下,射影定理(也称为欧几里得定理)表述为:在直角三角形ABC中,如果C是直角,则直角边AB上的高CD满足以下关系:
- CD² = AD × BD
- 同时,每一条直角边与其在斜边上的射影之间的乘积等于斜边的平方,即:
- AC × BC = AB²
换句话说,直角三角形斜边上的高是两直角边在斜边投影的比例中项,并且任意一直角边与它在斜边上的投影和斜边本身的长度之间也满足比例中项的关系。
2. 代数几何中的射影定理:
在更抽象的代数几何框架下,射影定理通常涉及射影空间和射影变换。
射影几何研究的是几何图形在无穷远点集合加入后的性质,以及这些图形经过投影变换后保持不变的特性。
例如,在代数几何中讨论射影
簇或射影变种时,射影定理可能指代将一个环上的代数集分解为其理想部分和闭点集的过程,这种分解有助于将复杂的代数问题转化为更容易处理的几何问题。
总结来说,射影定理在不同的数学分支中具有不同的意义,但都体现了射影思想的核心——通过投影操作来揭示几何对象间的深刻内在联系。
射影定理立体几何射影定理是立体几何中的一个重要定理,它描述了一个几何体在一个投影面上的投影和几何体的相似性之间的关系。
在本文中,我们将介绍射影定理的基本概念和应用,并探讨它在实际生活中的一些应用场景。
射影定理是从几何学的角度来研究物体的投影和相似性的定理。
在立体几何中,我们经常会遇到一个物体在一个投影面上的投影,例如一个建筑物在地面上的投影、一个人在墙上的投影等等。
射影定理告诉我们,在一定条件下,投影和几何体是相似的。
具体来说,射影定理指出,当一个几何体在一个平行于其一侧的投影面上投影时,投影和几何体是相似的。
换句话说,投影和几何体之间存在着一种比例关系,它们的相似比等于几何体和投影面之间的距离比。
例如,我们可以考虑一个长方体在一个平行于其中一个侧面的投影面上的投影。
根据射影定理,投影的形状和长方体的形状是相似的。
如果我们将这个投影和长方体分别用比例相等的边长表示,那么它们之间的比例关系就成立。
射影定理在实际生活中有着广泛的应用。
首先,它在建筑设计中起着重要的作用。
建筑师在设计建筑物时往往会通过投影来预测建筑物在不同时间和天气条件下的外观。
射影定理可以帮助建筑师准确地计算出建筑物在投影面上的投影,从而更好地评估建筑物的外观效果。
射影定理在地图制作和导航系统中也有着重要的应用。
地图制作师常常需要将三维的地理信息转化为二维的地图,这就涉及到将地球表面上的物体在地图上的投影。
通过射影定理,地图制作师可以准确地将地球表面上的物体的形状和位置转化为地图上的投影,从而制作出准确的地图。
射影定理还在计算机图形学中被广泛应用。
计算机图形学中的三维模型往往需要在二维屏幕上进行显示,这就需要将三维模型投影到屏幕上。
通过射影定理,计算机图形学可以准确地计算出三维模型在屏幕上的投影,从而实现逼真的三维图形显示。
射影定理的应用还远不止于此。
它在摄影术、天文学、物理学等领域都有着重要的应用。
在摄影术中,摄影师常常需要根据不同的角度和距离来拍摄物体的照片,这就涉及到将三维物体的形状和纹理投影到二维照片上。
射影几何定理摘要:一、射影几何定理的定义与背景1.射影几何的起源与发展2.射影几何定理的概念引入二、射影几何定理的重要性质1.定理的基本内容与公式表述2.定理在射影几何中的核心地位三、射影几何定理的应用领域1.在数学领域的应用2.在其他学科领域的应用四、射影几何定理的意义与价值1.对于数学理论的贡献2.对于实际问题的解决正文:射影几何定理,作为射影几何学中的一个重要理论,起源于19 世纪,经历了漫长的发展过程,逐渐成为了射影几何学研究的基础。
该定理不仅对射影几何学科有着深远的影响,同时也为其他学科领域提供了有力的理论支持。
射影几何定理的一个重要性质是,它揭示了射影空间中的点到直线、直线与平面的位置关系。
具体来说,该定理的公式表述为:在射影空间中,给定点P、直线L 和平面π,如果P 在L 上,且L 在π上,那么P 也在π上。
这个定理在射影几何中具有核心地位,为射影几何的研究奠定了基础。
射影几何定理在数学领域具有广泛的应用。
例如,在代数几何中,射影几何定理可以用来解决代数曲线的几何问题;在拓扑学中,射影几何定理可以帮助研究者理解流形之间的映射关系。
此外,射影几何定理还在计算机科学、物理学和工程学等领域发挥着重要作用。
射影几何定理对数学理论的发展作出了巨大贡献。
它不仅丰富了射影几何学的理论体系,而且为其他数学分支的研究提供了有力的工具。
同时,射影几何定理在实际问题中的应用也体现出其具有很高的价值。
例如,在计算机图形学中,射影几何定理可以用来简化三维模型的表示和计算;在光学设计中,射影几何定理有助于优化光学系统的结构和性能。
总之,射影几何定理作为射影几何学科的一个重要理论,具有深刻的内涵和广泛的应用价值。
数学射影定理公式数学射影定理是解析几何中的基本定理之一,它描述了一个点在一个几何体上的射影位置。
射影是一种将一个高维空间中的对象映射到一个低维空间中的技术,它在计算机图形学、计算机视觉和几何学中有广泛的应用。
射影定理的公式可以简单表示为:P' = P / Pz,其中P'表示点的射影位置,P表示点的三维坐标,Pz表示点在Z轴上的坐标。
这个公式可以用来计算点在三维空间中的射影位置,即将点投影到二维平面上。
在几何学中,射影定理主要用于计算点在投影平面上的坐标。
例如,我们可以使用射影定理来计算三维物体在投影平面上的阴影位置,从而实现逼真的渲染效果。
此外,在计算机视觉中,射影定理也可以用于计算相机在三维空间中的位置和姿态。
射影定理还有一些重要的性质。
首先,如果一个点在投影平面上的射影位置为P',那么该点的任意倍数在投影平面上的射影位置也为P'。
其次,如果两个点在三维空间中的连线与投影平面平行,那么它们在投影平面上的连线也与投影平面平行。
射影定理的应用不仅限于几何学和计算机图形学领域,它还可以用于计算机视觉中的物体识别和姿态估计。
例如,当我们在图像中检测到一个物体时,我们可以使用射影定理来计算该物体在三维空间中的位置和姿态,进而实现对物体的准确定位和识别。
射影定理的公式简洁明了,但在应用中需要注意一些细节。
首先,由于射影定理涉及到除法运算,因此需要确保点的Z坐标不为零,否则会导致除零错误。
其次,射影定理只能用于计算点在投影平面上的射影位置,而不能用于计算点在其他平面上的射影位置。
数学射影定理公式是解析几何中的重要工具,它可以用于计算点在三维空间中的射影位置。
射影定理在计算机图形学、计算机视觉和几何学等领域有着广泛的应用,对于实现逼真的渲染效果和准确定位物体位置具有重要意义。
在应用射影定理时,需要注意除零错误和射影平面的选择,以确保计算结果的准确性和可靠性。
通过深入理解和灵活应用射影定理,我们可以在相关领域取得更好的研究和应用成果。
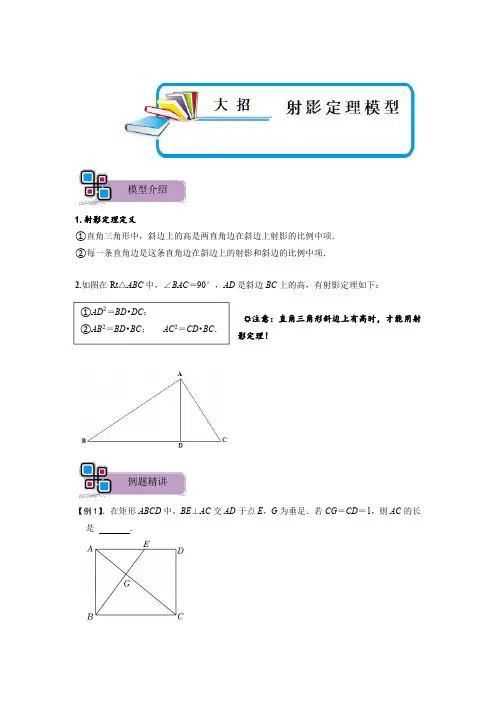
模型介绍1.射影定理定义①直角三角形中,斜边上的高是两直角边在斜边上射影的比例中项.②每一条直角边是这条直角边在斜边上的射影和斜边的比例中项.2.如图在Rt △ABC 中,∠BAC =90°,AD 是斜边BC 上的高,有射影定理如下: 注意:直角三角形斜边上有高时,才能用射影定理!例题精讲【例1】.在矩形ABCD 中,BE ⊥AC 交AD 于点E ,G 为垂足.若CG =CD =1,则AC 的长是.①AD 2=BD •DC ;②AB 2=BD •BC ;AC 2=CD •BC .解:∵四边形ABCD是矩形,∴AB=CD=1,∠ABC=90°,∵BE⊥AC,∴∠AGB=90°=∠ABC,∵∠BAG=∠CAB,∴△ABG∽△ACB,∴=,∴AG•AC=AB2(射影定理),即(AC﹣1)•AC=12,解得:AC=或AC=(不合题意舍去),即AC的长为,故答案为:.【例2】.如图:二次函数y=ax2+bx+2的图象与x轴交于A、B两点,与y轴交于C点,若AC⊥BC,则a的值为()A.﹣B.﹣C.﹣1D.﹣2解:设A(x1,0)(x1<0),B(x2,0)(x2>0),C(0,t),∵二次函数y=ax2+bx+2的图象过点C(0,t),∴t=2;∵AC⊥BC,∴OC2=OA•OB(射影定理),即4=|x1x2|=﹣x1x2,根据韦达定理知x1x2=,∴a=﹣.故选:A.【例3】.将沿弦BC折叠,交直径AB于点D,若AD=4,DB=5,则BC的长是()A.3B.8C.D.2解:连接CA、CD;根据折叠的性质,知所对的圆周角等于∠CBD,又∵所对的圆周角是∠CBA,∵∠CBD=∠CBA,∴AC=CD(相等的圆周角所对的弦相等);∴△CAD是等腰三角形;过C作CE⊥AB于E.∵AD=4,则AE=DE=2;∴BE=BD+DE=7;在Rt△ACB中,CE⊥AB,根据射影定理,得:BC2=BE•AB=7×9=63;故BC=3.故选:A.变式训练【变式1】.如图,在△ABC中,若AB=AC,BC=2BD=6,DE⊥AC,则AC•EC的值是9.解:如图,∵在△ABC中,若AB=AC,BC=2BD=6,∴AD⊥BC,CD=BD=3.又DE⊥AC,∴∠CED=∠CDA=90°.∵∠C=∠C,∴△CDE∽△CAD.∴=,即AC•EC=CD2=9.(射影定理)故答案是:9.【变式2】.如图所示,在矩形ABCD中,AE⊥BD于点E,对角线AC,BD交于O,且BE:ED=1:3,AD=6cm,则AE=cm.解:设BE=x,因为BE:ED=1:3,故ED=3x,根据射影定理,AD2=3x(3x+x),即36=12x2,x2=3;由AE2=BE•ED,AE2=x•3x;即AE2=3x2=3×3=9;AE=3.【变式3】.如图,若抛物线y=ax2+bx+c(a≠0)与x轴交于A、B两点,与y轴交于点C,若∠OAC=∠OCB.则ac的值为()A.﹣1B.﹣2C.D.解:设A(x1,0),B(x2,0),C(0,c),∵二次函数y=ax2+bx+c的图象过点C(0,c),∴OC=c,∵∠OAC=∠OCB,OC⊥AB,∴△OAC∽△OCB,∴,∴OC2=OA•OB(即射影定理)即|x1•x2|=c2=﹣x1•x2,令ax2+bx+c=0,根据根与系数的关系知x1•x2=,∴,故ac=﹣1,故选:A.【变式4】.如图,正方形ABCD中,E为AB上一点,AF⊥DE于点F,已知DF=5EF=5,过C、D、F的⊙O与边AD交于点G,则DG=____________.解:连接CF、GF,如图:在正方形ABCD中,∠EAD=∠ADC=90°,AF⊥DE,∴△AFD∽△EAD,∴=,又∵DF=5EF=5,∴AD====CD,在Rt△AFD中,AF===,∵∠CDF+∠ADF=90°,∠DAF+∠ADF=90°,∴∠DAF=∠CDF,∵四边形GFCD是⊙O的内接四边形,∴∠FCD+∠DGF=180°,∵∠FGA+∠DGF=180°,∴∠FGA=∠FCD,∴△AFG∽△DFC,∴=,∴=,∴AG=,∴DG=AD﹣AG=﹣【变式5】.如图,在△ABC中,以AC边为直径的⊙O交BC于点D,过点B作BG⊥AC 交⊙O于点E、H,连AD、ED、EC.若BD=8,DC=6,则CE的长为2.解:∵AC为⊙O的直径,∴∠ADC=90°,∵BG⊥AC,∴∠BGC=∠ADC=90°,∵∠BCG=∠ACD,∴△ADC∽△BGC,∴=,∴CG•AC=DC•BC=6×14=84,连接AE,∵AC为⊙O的直径,∴∠AEC=90°,∴∠AEC=∠EGC=90°,∵∠ACE=∠ECG,∴△CEG∽△CAE,∴=,∴CE2=CG•AC=84,∴CE=2.故答案为2.【变式6】.如图,四边形ABCD是平行四边形,过点A作AE⊥BC交BC于点E,点F在实战演练BC 的延长线上,且CF =BE ,连接DF .(1)求证:四边形AEFD 是矩形;(2)连接AC ,若∠ACD =90°,AE =4,CF =2,求EC 和AC的长.(1)证明:∵四边形ABCD 是平行四边形,∴AD ∥BC ,AD =BC ,∵CF =BE ∴BE +CE =CF +CE ,即BC =EF ,∴AD =EF ,∵AD ∥EF ,∴四边形AEFD 是平行四边形,∵AE ⊥BC ,∴∠AEF =90°,∴平行四边形AEFD 是矩形;(2)解:如图,∵CF =BE ,CF =2,∴BE =2,∵四边形ABCD 是平行四边形,∴AB ∥CD ,∴∠BAC =∠ACD =90°,∵AE ⊥BC ,∴AE 2=BE •EC (射影定理),∴EC ===8,∴AC ===4.1.如图,在矩形ABCD 中,DE ⊥AC ,垂足为点E .若sin ∠ADE =,AD =4,则AB 的长为()A .1B .2C .3D .4解:∵DE ⊥AC ,∴∠ADE+∠CAD=90°,∵∠ACD+∠CAD=90°,∴∠ACD=∠ADE,∵矩形ABCD的对边AB∥CD,∴∠BAC=∠ACD,∵sin∠ADE=,BC=AD=4,∴=,∴=,∴AC=5,由勾股定理得,AB==3,故选:C.2.如图,在矩形ABCD中,BD=2.对角线AC与BD相交于点O,过点D作AC的垂线,交AC于点E,AE=3CE.则DE2的值为()A.4B.2C.D.4解:∵四边形ABCD是矩形,∴∠ADC=90°,AC=BD=2,∵AE=3CE,∴AE=AC=,CE=AC=,∵∠ADC=90°,∴∠DAC+∠ACD=90°,∵DE⊥AC,∴∠AED=∠CED=90°,∴∠ADE+∠DAC=90°,∴∠ADE=∠ACD,∴△ADE∽△DCE,∴=,∴DE2=AE•CE=×=,故选:C.3.如图,在正方形ABCD内,以D点为圆心,AD长为半径的弧与以BC为直径的半圆交于点P,延长CP、AP交AB、BC于点M、N.若AB=2,则AP等于()A.B.C.D.解:如图,设点S为BC的中点,连接DP,DS,DS与PC交于点W,作PE⊥BC于点E,PF⊥AB于点F,∴DP=CD=2,PS=CS=1,即DS是PC的中垂线,∴△DCS≌△DPS,∴∠DPS=∠DCB=90°,∴DS===,由三角形的面积公式可得PC=,∵BC为直径,∴∠CPB=90°,∴PB==,∴PE=FB==,∴PF=BE==,∴AF=AB﹣FB=,∴AP==故选:B.4.如图,点P是⊙O的直径BA延长线上一点,PC与⊙O相切于点C,CD⊥AB,垂足为D,连接AC、BC、OC,那么下列结论中:①PC2=PA•PB;②PC•OC=OP•CD;③OA2=OD•OP;④OA(CP﹣CD)=AP•CD,正确的结论有()个.A.1B.2C.3D.4解:①∵PC与⊙O相切于点C,∴∠PCB=∠A,∠P=∠P,∴△PBC∽△PCA,∴PC2=PA•PB;②∵OC⊥PC,∴PC•OC=OP•CD;③∵CD⊥AB,OC⊥PC,∴OC2=OD•OP,∵OA=OC,∴OA2=OD•OP;④∵AP•CD=OC•CP﹣OA•CD,OA=OC,∴OA(CP﹣CD)=AP•CD,所以正确的有①,②,③,④,共4个.故选:D.5.如图,在Rt△ABC中,∠A=90°,AB=AC=8,点E为AC的中点,点F在底边BC上,且FE⊥BE,则CF长.解:作EH⊥BC于H,如图,∵∠A=90°,AB=AC=8,∴BC=AB=16,∠C=45°,∵点E为AC的中点,∴AE=CE=4,∵△CEH为等腰直角三角形,∴EH=CH==4,∴BH=12在Rt△ABE中,BE==4,在Rt△BEF中,∵EH⊥BF,∴BE2=BH•BF,即BF==,∴CF=BC﹣BF=16﹣=.故答案为.6.如图,在矩形ABCD中,点E在边AD上,把△ABE沿直线BE翻折,得到△GBE,BG 的延长线交CD于点F.F为CD的中点,连结CG,若点E,G,C在同一条直线上,FG=1,则CD的长为2+2,cos∠DEC的值为﹣1.解:∵四边形ABCD是矩形,∴AB=CD,AD∥BC,∠BCD=∠A=∠D=90°,∴∠AEB=∠EBC,∠BCG=∠DEC,由折叠的性质得:BG=BA,∠EGB=∠A=90°,∠GEB=∠AEB,∴CD=BG,∴∠EBC=∠GEB,∴BC=EC,∵点E,G,C在同一条直线上,∴∠CGF=90°,∠CGB=180°﹣∠EGB=90°,∵F为CD的中点,∴CF=DF,设CF=DF=x,则BG=CD=2x,∵∠CFG=∠BFC,∴△CFG∽△BFC,∴=,∴CF2=FG•BF,即x2=1×(1+2x),解得:x=1+或x=1﹣(舍去),∴CD=2x=2+2,∵∠DEC+∠ECD=90°,∠GFC+∠ECD=90°,∴∠DEC=∠GFC,∴cos∠DEC=cos∠GFC===﹣1,故答案为:2+2,﹣1.7.如图,在平面直角坐标系中,直线y=kx+1分别交x轴,y轴于点A,B,过点B作BC ⊥AB交x轴于点C,过点C作CD⊥BC交y轴于点D,过点D作DE⊥CD交x轴于点E,过点E作EF⊥DE交y轴于点F.已知点A恰好是线段EC的中点,那么线段EF的长是.解:因为AB的解析式为y=kx+1,所以B点坐标为(0,1),A点坐标为(﹣,0),由于图象过一、二、三象限,故k>0,又因为BC⊥AB,BO⊥AC,所以在Rt△ABC中,BO2=AO•CO,代入数值为:1=•CO,CO=k,同理,在Rt△BCD中,CO2=BO•DO,代入数值为:k2=1•DO,DO=k2又因为A恰好是线段EC的中点,所以B为FD的中点,OF=1+1+k2,Rt△FED中,根据射影定理,EO2=DO•OF,即(k++)2=k2•(1+k2+1),整理得(k﹣)(k+)(k2+2)(k2+1)=0,解得k=.根据中位线定理,EF=2GB=2DC,DC==,EF=2.8.如图,在菱形ABCD中,过点D作DE⊥CD交对角线AC于点E,连接BE,点P是线段BE上一动点,作P关于直线DE的对称点P',点Q是AC上一动点,连接P'Q,DQ.若AE=14,CE=18,则DQ﹣P'Q的最大值为.解:如图,连接BD交AC于点O,过点D作DK⊥BC于点K,延长DE交AB于点R,连接EP′并延长,延长线交AB于点J,作EJ关于AC的对称线段EJ′,则点P′的对应点P″在线段EJ′上.当点P是定点时,DQ﹣QP′=DQ﹣QP″,当D,P″,Q共线时,QD﹣QP′的值最大,最大值是线段DP″的长,当点P与B重合时,点P″与J′重合,此时DQ﹣QP′的值最大,最大值是线段DJ′的长,也就是线段BJ的长.∵四边形ABCD是菱形,∴AC⊥BD,AO=OC,∵AE=14.EC=18,∴AC=32,AO=OC=16,∴OE=AO﹣AE=16﹣14=2,∵DE⊥CD,∴∠DOE=∠EDC=90°,∵∠DEO=∠DEC,∴△EDO∽△ECD,∴DE2=EO•EC=36,∴DE=EB=EJ=6,∴CD===12,∴OD===4,∴BD=8,=×OC×BD=BC•DK,∵S△DCB∴DK==,∵∠BER=∠DCK,∴sin∠BER=sin∠DCK===,∴RB=BE×=,∵EJ=EB,ER⊥BJ,∴JR=BR=,∴JB=DJ′=,∴DQ﹣P'Q的最大值为.解法二:DQ﹣P'Q=BQ﹣P'Q≤BP',显然P'的轨迹EJ,故最大值为BJ.勾股得CD,OD.△BDJ∽△BAD,BD2=BJ*BA,可得BJ=.故答案为:.9.在矩形ABCD中,点E为射线BC上一动点,连接AE.(1)当点E在BC边上时,将△ABE沿AE翻折,使点B恰好落在对角线BD上点F处,AE交BD于点G.①如图1,若BC=AB,求∠AFD的度数;②如图2,当AB=4,且EF=EC时,求BC的长.(2)在②所得矩形ABCD中,将矩形ABCD沿AE进行翻折,点C的对应点为C',当点E,C',D三点共线时,求BE的长.解:(1)①∵四边形ABCD是矩形,∴AD=BC,∠BAD=90°,∵BC=AB,∴AD=AB,∴tan∠ABD==,∴∠ABD=60°,由折叠的性质得:AF=AB,∴△ABF是等边三角形,∴∠AFB=60°,∴∠AFD=180°﹣∠AFB=120°;②由折叠的性质得:BF⊥AE,EF=EB,∵EF=EC,∴EF=EB=EC,∴BC=2BE,∵四边形ABCD是矩形,∴∠ABC=90°,AD=BC=2BE,AD∥BC,∴△ADG∽△EBG,∴==2,∴AG=2EG,设EG=x,则AG=2x,∴AE=3x,在△ABE中,BG⊥AE,∴AB2=AG•AE(射影定理),即42=2x•3x,解得:x=(负值已舍去),∴AE=3x=2,∴BE===2,∴BC=2BE=4,即BC的长为4;(2)当点E,C',D三点共线时,如图3,由②可知,BC=4,∵四边形ABCD是矩形,∴∠ABC=∠BCD=90°,AD=BC=4,CD=AB=4,AD∥BC,∴∠DCE=90°,∠CED=∠B'DA,由折叠的性质得:AB'=AB=4,∠B'=∠ABC=90°,∴∠DCE=∠B',DC=AB',∴△CDE≌△B'AD(AAS),∴DE=AD=4,∴CE===4,∴BE=BC+CE=4+4.10.如图,已知⊙O的半径为2,AB为直径,CD为弦,AB与CD交于点M,将弧CD沿着CD翻折后,点A与圆心O重合,延长OA至P,使AP=OA,连接PC.(1)求证:PC是⊙O的切线;(2)点G为弧ADB的中点,在PC延长线上有一动点Q,连接QG交AB于点E,交弧BC于点F(F与B、C不重合).问GE▪GF是否为定值?如果是,求出该定值;如果不是,请说明理由.解:(1)∵PA=OA=2,AM=OM=1,CM=,又∵∠CMP=∠OMC=90°,∴PC==2,∵OC=2,PO=4,∴PC2+OC2=PO2,∴∠PCO=90°,∴PC与⊙O相切;(2)GE•GF为定值,理由如下:如图2,连接GA、AF、GB,∵点G为弧ADB的中点,∴,∴∠BAG=∠AFG,∵∠AGE=∠FGA,∴△AGE∽△FGA,∴,∴GE•GF=AG2,∵AB为直径,AB=4,∴∠BAG=∠ABG=45°,∴AG=2,∴GE•GF=AG2=8.11.如图1,在正方形ABCD中,点E是AB边上的一个动点(点E与点A,B不重合),连接CE,过点B作BF⊥CE于点G,交AD于点F.(1)求证:△ABF≌△BCE;(2)如图2,当点E运动到AB中点时,连接DG,求证:DC=DG;(3)如图3,在(2)的条件下,过点C作CM⊥DG于点H,分别交AD,BF于点M,N,求的值.(1)证明:∵BF⊥CE,∴∠CGB=90°,∴∠GCB+∠CBG=90,∵四边形ABCD是正方形,∴∠CBE=90°=∠A,BC=AB,∴∠FBA+∠CBG=90,∴∠GCB=∠FBA,∴△ABF≌△BCE(ASA);(2)证明:如图2,过点D作DH⊥CE于H,设AB=CD=BC=2a,∵点E是AB的中点,∴EA=EB=AB=a,∴CE=a,在Rt△CEB中,根据面积相等,得BG•CE=CB•EB,∴BG=a,∴CG==a,∵∠DCE+∠BCE=90°,∠CBF+∠BCE=90°,∴∠DCE=∠CBF,∵CD=BC,∠CHD=∠CGB=90°,∴△CHD≌△BGC(AAS),∴CH=BG=a,∴GH=CG﹣CH=a=CH,∵DH=DH,∠CHD=∠GHD=90°,∴△DGH≌△DCH(SAS),∴CD=GD;(3)解:如图3,过点D作DQ⊥CE于Q,S△CDG=•DQ•CG=CH•DG,∴CH==a,在Rt△CQD中,CD=2a,∴DH==a,∵∠MDH+∠HDC=90°,∠HCD+∠HDC=90°,∴∠MDH=∠HCD,∴△CHD∽△DHM,∴=,∴HM=a,在Rt△CHG中,CG=a,CH=a,∴GH==a,∵∠MGH+∠CGH=90°,∠HCG+∠CGH=90°,∴∠CGH=∠CNG,∴△GHN∽△CHG,∴,∴HN==a,∴MN=HM﹣HN=a,∴=12.在平面直角坐标系中,已知A(﹣4,0),B(1,0),且以AB为直径的圆交y轴的正半轴于点C(0,2),过点C作圆的切线交x轴于点D.(1)求过A,B,C三点的抛物线的解析式;(2)求点D的坐标;(3)设平行于x轴的直线交抛物线于E,F两点,问:是否存在以线段EF为直径的圆,恰好与x轴相切?若存在,求出该圆的半径;若不存在,请说明理由.解:(1)令二次函数y=ax2+bx+c,则,∴,∴过A,B,C三点的抛物线的解析式为y=﹣x2﹣x+2.(2)以AB为直径的圆的圆心坐标为O′(﹣,0),∴O′C=,OO′=;∵CD为⊙O′切线∴O′C⊥CD,∴∠O′CO+∠OCD=90°,∠CO'O+∠O'CO=90°,∴∠CO'O=∠DCO,∴△O'CO∽△CDO,∴=,即=,∴OD=,∴D坐标为(,0).(3)存在,抛物线对称轴为x=﹣,设满足条件的圆的半径为r,则E的坐标为(﹣+r,|r|)或F(﹣﹣r,|r|),而E点在抛物线y=﹣x2﹣x+2上,∴|r|=﹣(﹣+r)2﹣(﹣+r)+2;∴r1=﹣1+,r2=﹣1﹣(舍去),r3=1+,r4=1﹣(舍去);故以EF为直径的圆,恰好与x轴相切,该圆的半径为或1+.。
射影定理巧妙记忆
射影定理是在线性代数中非常重要的定理,可以帮助我们理解向量空间中向量之间的关系。
为了帮助大家更好地记忆射影定理,建议采用以下方法:
1. 了解射影定理的数学定义和含义:射影定理指出,一个向量可以被分解为它在一个子空间上的投影和在该子空间的正交补空间上的投影之和。
这个定理可以帮助我们更好地理解线性代数中的向量空间,以及它们之间的关系。
2. 熟记射影定理的公式:射影定理的公式可以写成P = A(A^TA)^(-1)A^T,其中P 表示向量在子空间上的投影,A 表示子空间的基向量或者列向量,A^T 表示A 的转置,而(A^TA)^(-1) 表示A^TA 的逆。
熟记这个公式可以帮助我们更方便地使用射影定理。
3. 利用实际例子加深记忆:结合实际例子可以更加深刻地理解和记忆射影定理。
例如,在三维向量空间中,一个向量可以被分解成在一个平面上的投影和在该平面的法向量上的投影之和,我们可以通过画图或者实际计算,来加深对于射影定理的记忆。
4. 多做练习:多做一些相关的练习和题目可以帮助我们更好地理解和记忆射影定理。
同时也可以加深对于线性代数中其他概念的理解,从而更好地掌握这门学科。
总之,射影定理是线性代数中非常重要的定理,需要我们认真学习和掌握。
通过采用上述方法,可以帮助我们更好地记忆和理解射影定理,从而更加轻松地应对相关考试和课程。
射影定理的三个公式1.黄斑中心距镜头中心距离:黄斑中心距镜头中心距离(f)等于对象距镜头中心距离(u)与像距(v)的比值:f=u/v。
2.反投影距离:反投影距离(z)是指光源(位于黄斑中心)发射到镜头上,经过镜头聚焦后反射到胶片(或光感器)上的距离:z=fv。
3.透照比:透照比(h)是指光通过镜头聚焦时,对象距离与像距的比:h=u/z。
高尔基s) 投影定理(又叫投射定律)是光学成像术语,它指出一束光线透过镜头聚焦时,形成的图像与光线在原来发射点和接收点之间的变换有关。
该定律可以用三个数学表达式来表示,分别是黄斑中心距镜头中心距离(f)、反投影距离(z)和透照比(h)。
黄斑中心距镜头中心距离(f)表示聚焦前,对象与镜头中心的距离,其表达式为:f=u/v,其中u为对象距离镜头中心的距离,v为像距。
黄斑中心处发射出的光线,经过镜头准直聚焦时,发生反射或折射,反向照射到接收点上,表示投影距离(z),其表达式为:z=fv。
反向投影到接收点上时,距离与光线发射点是成比例变化的,通过光线发射点和接收点之间的比值就是透照比(h),其表达式为:h=u/z,其中u是对象距离镜头中心的距离,z是反投影距离。
投射定律的三个数学表达式:(1)黄斑中心距镜头中心距离(f):f=u/v:(2)反投影距离(z):z=fv:(3)透照比(h):h=u/z。
投射定律是利用光在物体和视觉器件之间传输时的变换来获得不同设备(如显微镜,照相机等)之间的成像关系的基础,它的应用非常广泛,在光学成像领域非常重要。
可以使用投射定律来确定、测量镜头的参数,如镜头的焦距、像距等,是实现良好的成像的基础。
另外,它也可以被用来研究复杂的光学系统,例如望远镜、激光调制等,使系统实现最佳成像效果。
射影几何三大入门定理1. 定理一:射影平面的基本性质射影几何是研究投影关系的一门数学分支,它研究的对象是射影空间和射影平面。
在射影几何中,有三个重要的入门定理,这些定理对于理解和应用射影几何具有重要意义。
首先,我们来讨论第一个定理:射影平面的基本性质。
1.1 射影平面的定义在介绍定理之前,我们需要先了解什么是射影平面。
射影平面是指一个由点和直线构成的集合,满足以下条件:•任意两条直线有且只有一个交点;•任意两个不同的点确定一条直线。
1.2 定理一的表述定理一指出,在射影平面中,存在以下基本性质:•任意两个不同的直线交于唯一一点;•任意两个不同的点确定唯一一条直线。
1.3 定理一的证明第一个性质:任意两个不同的直线交于唯一一点假设在射影平面中存在两个不同的直线L1和L2,在L1上取两个不同的点A和B,在L2上取两个不同的点C和D。
我们需要证明线段AB和CD的交点是唯一的。
根据射影平面的定义,任意两个不同的点确定唯一一条直线,所以线段AB确定了一条直线L3,线段CD也确定了一条直线L4。
由于L3和L4都与L1和L2相交,所以它们一定有一个公共交点P。
假设还存在另一个不同于P的交点Q,那么根据射影平面的定义,线段PQ也应该与直线L1相交。
但是根据前面的假设,A、B、C、D四个点在射影平面中是不共面的,所以直线PQ与直线L1没有交点。
这与假设矛盾,因此我们得出结论:任意两个不同的直线在射影平面中交于唯一一点。
第二个性质:任意两个不同的点确定唯一一条直线假设在射影平面中存在两个不同的点A和B,在A上取两条不同的直线L1和L2,在B上取两条不同的直线L3和L4。
我们需要证明直线AB和CD(其中C为L1与L3的交点,D为L2与L4的交点)是唯一相交的。
根据射影平面的定义,任意两条直线有且只有一个交点,所以线段AB与L1和L2分别有唯一的交点C和D。
假设还存在另一条直线EF与A、B两点相交,并且E和F分别是直线EF与L1和L2的交点。
射影定理的内容射影定理是数学中一个经典的定理,它是代数几何中的基本定理之一,也是现代代数几何的核心内容。
本文将从射影空间、射影几何、射影变换以及射影定理等方面来详细介绍射影定理的内容。
一、射影空间射影空间是指一个由向量空间V中的所有一维子空间所构成的集合,记为P(V)。
在射影空间中,每个向量都对应着一个一维子空间,而一维子空间又可以看作是一个向量的所有倍数所组成的集合。
因此,射影空间中的点可以看作是向量的等价类。
射影空间的一个重要性质是它具有同构不变性,即不同的线性变换在射影空间中对应着相同的变换。
这个性质使得射影空间成为了研究几何图形的一个有力工具。
二、射影几何射影几何是指在射影空间中研究几何图形的一种数学分支。
在射影几何中,直线被定义为两个点之间的最小一维子空间,平面被定义为三个点之间的最小二维子空间,等等。
射影几何中的一个重要问题是如何描述一个几何图形。
一个几何图形可以被描述为一个射影空间中的子集,它的维数即为这个子集所在的最小子空间的维数。
三、射影变换射影变换是指从一个射影空间到另一个射影空间的一个双射,它保持了直线和点的性质。
射影变换可以用一个矩阵来表示,这个矩阵是一个非奇异的n+1阶方阵,其中n为射影空间的维数。
射影变换有一些重要的性质。
首先,任何射影变换都可以看作是一个仿射变换和一个伸缩变换的组合,其中仿射变换是指一个将直线变为直线的变换,伸缩变换是指一个将点变为点的变换。
其次,射影变换具有同构不变性,即不同的矩阵在射影空间中对应着相同的变换。
四、射影定理射影定理是代数几何中的一个重要定理,它将射影几何和射影变换联系了起来。
射影定理的内容如下:设X和Y分别为两个射影空间,f:X→Y是一个非常数的射影变换,那么f在X上的像集是一个在Y中的射影子空间。
这个定理的意义是,射影变换可以将一个射影空间中的子集映射到另一个射影空间中的子集,而这个映射后的子集仍然是一个射影子空间。
这个定理是代数几何中的基本定理之一,它在研究射影几何和射影变换中有着重要的应用。
射影定理向量介绍射影定理是线性代数中的基本概念,与向量空间和线性变换密切相关。
在本文中,我们将深入探讨射影定理与向量的关系,解释射影定理的概念、原理以及应用,并讨论其在现实世界中的重要性。
射影定理的概念射影定理是线性代数中的一条基本定理,描述了线性变换中的一个重要性质。
在向量空间中,射影定理说明对于一个向量空间V和它的一个子空间W,存在唯一的向量v’是V中距离子空间W最近的向量,同时使得v’和W中的每个向量的差都垂直于子空间W。
这个向量v’被称为向量v的射影,它可以通过一个线性变换P将向量v投影到子空间W上。
射影定理的原理射影定理的核心原理是基于向量空间V的直和分解。
给定向量空间V和其子空间W,可以将V表示为W和W的正交补空间(即和W垂直的所有向量构成的空间)的直和。
对于V中的任意一个向量v,可以分解成W中的一个向量w和W的正交补空间中的一个向量u的和。
射影定理的关键是通过线性变换P将向量v投影到W上,使得投影向量Pv与v的差,即v - Pv,垂直于W的正交补空间。
射影定理的应用射影定理在很多领域都有着广泛的应用。
以下是一些常见的应用场景:图像处理在图像处理中,射影定理被广泛应用于图像压缩、去噪和图像恢复等方面。
通过对图像进行射影,可以提取图像的主要特征,减少图像的冗余信息,从而实现图像的压缩和降噪。
同时,通过对图像的射影恢复,可以在一定程度上恢复图像的细节和清晰度。
机器学习在机器学习领域,射影定理常常被应用于特征提取和降维等任务中。
通过将高维数据集投影到低维空间,可以减少数据的维度,提高模型的训练效率和泛化能力。
同时,射影定理也被用于解决数据集中存在的多重共线性问题,将高度相关的特征投影到一个子空间中,从而提高模型的稳定性和可解释性。
信号处理在信号处理中,射影定理常被用于信号降噪、滤波和频谱分析等方面。
通过将信号投影到一个子空间上,可以去除噪声和干扰,提取出信号的有效信息。
同时,利用射影定理可以将信号投影到频域上,进行频谱分析,从而得到信号的频谱特性和频率成分。
射影知识点总结高中引言射影是一门应用数学中的重要分支,它包括平面几何、立体几何、解析几何和向量几何等内容,是数学学科中不可或缺的部分。
在高中阶段,学生需要学习射影的基本概念、定理和方法,掌握相关的基本技能和解题能力。
本文将对射影知识点进行总结,帮助学生更好地理解和掌握这一重要知识点。
一、射影的基本概念1.1 射影的起源射影起源于古代希腊,最早被提出并应用于建筑和绘画中。
随着数学的发展,射影得到了深入研究和发展,成为了一门独立的数学分支。
1.2 射影的定义射影是指一种特殊的空间变换,它将三维空间中的几何图形投影到一个二维平面上,从而得到一个新的平面图形。
在射影过程中,原空间中的物体被投影到新平面上的位置和形状都会发生变化。
1.3 射影的分类根据射影的性质和特点,射影可以分为平行射影、透视射影和中心射影等多种类型。
不同类型的射影在实际应用中有着不同的特点和作用。
1.4 射影的应用射影在数学、物理、工程、艺术等领域都有着广泛的应用。
在建筑设计、计算机图形学、摄影等领域都离不开射影的应用。
掌握射影知识对于理解和应用这些领域都是至关重要的。
二、射影的基本定理2.1 射影定理射影定理是射影理论中的重要基本定理,它描述了在射影变换中图形的性质和变化规律。
射影定理的研究对于理解和分析射影过程具有重要意义。
2.2 射影原理射影原理是射影理论中的另一个基本定理,它描述了在不同射影类型中图形的性质和变化规律。
掌握射影原理对于分析和比较不同类型射影过程有着重要意义。
2.3 射影定理的应用射影定理在建筑设计、摄影以及其他领域都有着广泛的应用。
理解和应用射影定理能够帮助人们更好地处理和分析射影过程,提高工作效率和质量。
三、射影的基本方法3.1 射影的基本步骤射影过程中的基本步骤包括确定射影原点、确定射影平面、确定射影方向、确定射影参数等。
了解和掌握这些基本步骤对于进行射影变换具有重要意义。
3.2 射影的基本技巧在进行射影过程中需要掌握一些基本技巧,如射影平面的选择、射影参数的确定、射影方向的调整等。