基于matlab的水箱液位模糊控制
- 格式:doc
- 大小:731.50 KB
- 文档页数:9


毕业设计基于MATLAB的洗衣机模糊控制设计摘要模糊控制洗衣机不仅实现了洗衣机的全面自动化,也提高了洗衣的质量,具有很强的实用性和较好的发展前景。
本设计的主要目的是设计一个比较合理的洗衣机模糊控制器,这种采用模糊控制的洗衣机能够通过洗衣桶内水的脏污程度和污渍性质(油污或者泥污)来自动预选水位和洗涤时间,以达到最佳的洗涤效果。
本文主要研究了基于MATLAB的洗衣机模糊控制。
首先介绍了模糊控制的基本原理,明确本设计中所要控制的变量,即水位和洗涤时间。
其次,定义了输入、输出模糊集,结合实际情况定义了隶属函数,然后建立模糊控制规则,给出模糊控制表,进行了模糊推理。
最后采用Simulink对该系统进行仿真,通过仿真曲线可以看出,文中采用的模糊控制方法是正确而有效的。
关键词:模糊控制;模糊集;隶属函数;控制规则;模糊推理AbstractFuzzy control of washing machine does not only achieve a fully automated washing machine, but also improve the quality of laundry; it has a strong practicality and a good development prospect.The main purpose of this design is to design a more reasonable washing machine fuzzy controller, fuzzy control of washing machine can automatically detect the dirty level of laundry bucket and the nature of stain (oil or sediment); it also can automatically pre-selected water level and washing time to achieve the best water quality.This paper mainly studies what based on the MATLAB fuzzy control of washing machines. First, it introduces the basic principles of fuzzy control, clearly the variables of this design to control, those are water level and washing time; Second, define the input and output fuzzy sets, and define the membership function combined the actual conditions, and then create the fuzzy control rules, give the fuzzy control table, then use these to the fuzzy reasoning. Finally, Simulink simulates the system; the simulation curves show that the text used in fuzzy control method is correct and effective.Key words:fuzzy control; fuzzy sets; the membership function; control rules; the fuzzy reasoning目录第1章前言 (1)1.1 选题的目的及意义 (1)1.2 国内外发展情况 (1)1.3 MATLAB简介 (2)1.4 模糊控制简介 (4)1.5 论文的主要内容 (4)第2章模糊控制器原理及设计 (6)2.1 模糊控制原理 (6)2.2 模糊控制系统的分类 (17)2.3 模糊控制器的设计 (18)第3章洗衣机的模糊控制 (21)3.1 洗衣机的时间控制 (21)3.2 洗衣机的水位控制 (28)3.3 本章小结 (31)结论 (32)参考文献 (33)致谢 (34)附录1 (35)附录2 (36)附录3 (37)附录4 (38)附录5 (40)第1章前言1.1 选题的目的及意义随着现代社会生活节奏的不断加快和人们生活水平的不断提高,人们对各种方便、快捷的家用电器需求量越来越大,为了提高人们的生活效率,全自动洗衣机应运而生。
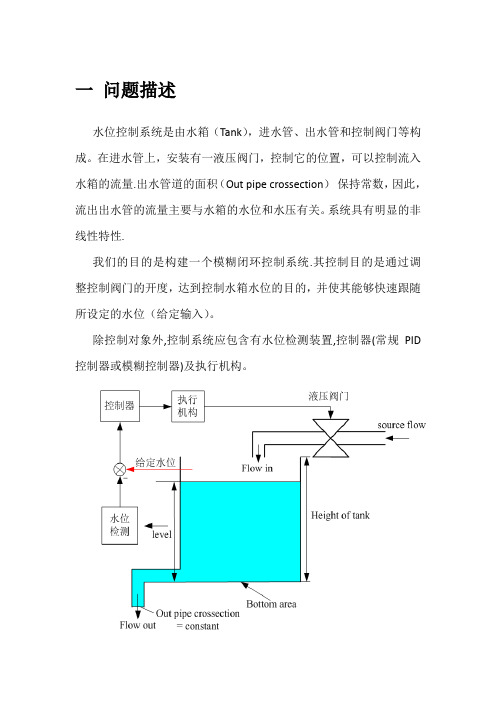
一问题描述水位控制系统是由水箱(Tank),进水管、出水管和控制阀门等构成。
在进水管上,安装有一液压阀门,控制它的位置,可以控制流入水箱的流量.出水管道的面积(Out pipe crossection)保持常数,因此,流出出水管的流量主要与水箱的水位和水压有关。
系统具有明显的非线性特性.我们的目的是构建一个模糊闭环控制系统.其控制目的是通过调整控制阀门的开度,达到控制水箱水位的目的,并使其能够快速跟随所设定的水位(给定输入)。
除控制对象外,控制系统应包含有水位检测装置,控制器(常规PID 控制器或模糊控制器)及执行机构。
二控制系统动态结构图流速计算依据为简化伯努利方程或托里拆利定律,二者结论一致。
其中托里拆利定律内容为:忽略粘滞性,任何液体止点从小孔中流出的速度与它从h高度处自由落下的速度相等。
Level flow out动态模型中主要用到的计算关系式如下:液位=容积/底面积level=tank volume/area流量=流速*出水口面积流速=(2*g*level)^0.5被控对象水箱模型搭建按照上述动态结构图进行,实际设计的水箱模型如下:封装后执行机构:VALVE三水位控制系统模型四模型使用方法启动matlab,命令行输入sltank,既可打开水位模糊控制仿真模型. 设置const大于等于0,系统工作于PID控制模式设置const小于0,系统工作于模糊控制模式模糊控制时液位输入输出关系(双击Comparison示波器)液位动画PID控制时液位的输入输出关系比较两种控制模式下液位曲线可以发现PID控制有超调,这一点在液位动画中也有体现.修改模型参数PID参数的调整可以直接双击PID Controller模块设置,这里着重介绍模糊控制器参数的修改.用到的主要命令如下:例如可通过以下代码以文本形式显示tanka=readfis(’tank’)%读取tank文件showfis(a); %显示在这里通过模糊推理的用户界面来修改水位控制的规则库,查看对控制效果的影响。

实验二:模糊控制水箱液位调节一实验目的1.掌握模糊控制的原理2.加强模糊控制在实践中的应用二实验器材装有Matlab软件PC电脑一台三实验原理模糊控制的基本原理:它的核心部分为模糊控制器,模糊控制器的控制规律由有计算机程序实现。
详见P32(模糊控制原理)。
四原代码clear allclose allq1=0; %定义第一个水箱的入水量q2=0; %定义第一个水箱的出水量q3=0; %定义第二个水箱的出水量q4=0; %定义第三个水箱的出水量b=1.4; %定义第一个水箱入水量的控制系数a1=8.6; %定义第一个水箱出水量的控制系数a2=8.6; %定义第一个水箱出水量的控制系数h1=100; %定义第一个水箱中水的初始高度h2=100; %定义第二个水箱中水的初始高度h3=100; %定义第三个水箱中水的初始高度v=119; %定义sin函数的系数s=190; %定义水箱底面积k=10; %定义开关控制量e=0; %定义误差e_1=0;ec=0;H=130; %定义第三个水箱的期望高度e=H-h1;a=newfis('fuzz'); %误差函数a=addvar(a,'input','e',[-25,25]);a=addmf(a,'input',1,'NB','zmf',[-25,-10]);a=addmf(a,'input',1,'PS','trimf',[-25,-10,0]);a=addmf(a,'input',1,'Z','trimf',[-10,0,10]);a=addmf(a,'input',1,'PS','trimf',[0,10,25]);a=addmf(a,'input',1,'PB','smf',[10,25]);a=addvar(a,'output','u',[0,100]); %控制量输出函数a=addmf(a,'output',1,'NB','zmf',[0,30]);a=addmf(a,'output',1,'NS','trimf',[0,30,50]);a=addmf(a,'output',1,'Z','trimf',[30,50,70]);a=addmf(a,'output',1,'PS','trimf',[50,70,100]);a=addmf(a,'output',1,'PB','smf',[70,100]);rulelist=[1 1 1 1;2 2 1 1;3 3 1 1;4 4 1 1;5 5 1 1];a = addrule(a, rulelist);for i=1:1:8000tt(i)=i; %时间轴q1=b*k; %第一个水箱的进水量q2=a1*sqrt(h1); %第一个水箱的出水量h1=h1+(q1-q2)/s; %第一个水箱中水的高度q3=a2*sqrt(h2); %第二个水箱的进水量h2=h2+(q2-q3)/4; %第二个水箱中水的高度q4=v*abs(sin(2.3*pi*i+0.35)); %第二个谁想的出水量h3=h3+(q3-q4)/s; %第三个水箱中的高度hh(i)=h3;k=evalfis(e,a);e=H-h3;endplot(tt,hh)五、插图。

智能控制及MATLAB实现—水箱液位模糊控制仿真设计智能控制是一种利用先进的智能技术和算法来实现自动控制的方法。
在智能控制中,模糊控制是一种常见且有效的方法之一、模糊控制通过将模糊逻辑应用于控制系统中的输入和输出,根据模糊规则来进行决策和控制。
水箱液位控制是一个典型的控制问题,常常用于工业和民用领域中的自动化系统。
在许多控制应用中,水箱液位的控制是一个关键的问题,因为它需要根据系统的液位情况来实现稳定的控制。
在模糊控制中,首先需要建立一套模糊规则系统,该系统包括模糊化、模糊推理和解模糊化这三个步骤。
模糊化是将实际输入转换为模糊集合的过程。
在水箱液位控制中,可以将液位分为低、中和高三个模糊集合。
通过将实际液位值映射到这些模糊集合中的一个,来表示液位状态。
模糊推理是根据一组模糊规则,将模糊输入转换为模糊输出的过程。
通过将输入和规则进行匹配,确定输出的模糊集合。
在水箱液位控制中,可以使用如下规则:如果液位低且液位变化小,则控制信号为增大水流量;如果液位高且液位变化大,则控制信号为减小水流量;如果液位中等且液位变化适中,则控制信号为不变。
解模糊化是将模糊输出转换为实际的控制信号的过程。
在水箱液位控制中,可以使用模糊加权平均值的方法来进行解模糊化。
通过将模糊集合和其对应的权重进行加权平均计算,得到最终的控制信号。
在MATLAB中,可以使用Fuzzy Logic Toolbox来实现水箱液位模糊控制仿真设计。
首先需要建立输入和输出的模糊化和解模糊化函数,然后根据实际的模糊规则,构建模糊系统。
最后通过设定输入的模糊值,使用模糊系统进行推理和解模糊,得到最终的控制信号。
总结起来,智能控制及MATLAB实现水箱液位模糊控制仿真设计包括建立模糊规则系统,进行模糊化、模糊推理和解模糊化三个步骤,通过Fuzzy Logic Toolbox来实现模糊控制系统的构建和仿真。
通过利用模糊控制的方法,可以实现水箱液位的自动稳定控制,并提高了控制系统的鲁棒性和适应性。

水箱水位模糊控制系统设计一.在MATLAB命令窗口中输入sltank,便可打开如图所示的模型窗口。
图1 sltank仿真图(1)打开MATLAB,输入指令fuzzy,打开模糊逻辑工具箱的图形用户界面窗口,新建一个Mamdani模糊推理系统。
(2)增加一个输入变量,将输入变量命名为水位误差、误差变化,将输出变量命名为阀门开关速度。
这样就建立了一个两输入单输出的模糊推理系统,保存为shuiwei1。
图2 增加一个输入变量(3)设计模糊化模块;设水位误差level的论域为[2、95 3、05],误差变化率rate的论域为[-0、2 0、2];两个输入量的模糊集为level设为为7个,rate设为5个:其中水位误差level定为NB、NM、NS、ZE、PS、PM、PB;参数分别为[0、01 2、95]、[0、01 2、97],[0、01 2、99]、[0、01 3]、[0、01 3、01]、[0、01 3、03]、[0、01 3、05],隶属度均为高斯函数;图3 输入量level的参数设定误差变化率rate分别为负大,负小,不变,正小,正大。
参数分别为,[0、03 -0、2]、[0、03 -0、1]、[0、03 0]、[0、03 0、1]、[0、03 -0、2],隶属度函数均为高斯函数。
图4 误差变化率rate的参数设定阀门的开关速度设为七个等级:快关,中关,慢关,不动,慢开,中开,快开,其论域为[2、95 3、05]。
参数分别为;[2、94 2、95 2、96]、[2、965 2、97 2、975]、[2、99 2、99 2、995]、[2、999 3 3、001]、[3、005 3、01 3、015]、[3、02 3、03 3、035]、[3、04 3、05 3、06],隶属函数为三角形函数。
图5 输出量valve的参数设定(4)设计模糊规则打开Ruel Editor窗口,通过选择添加模糊规则;1)If (level is NB) and (rate is 负大) then (valve is 快关) (1)2)If (level is NB) and (rate is 负小) then (valve is 快关) (1) 3)If (level is NB) and (rate is 不变) then (valve is 快关) (1) 4)If (level is NB) and (rate is 正小) then (valve is 中关) (1)5)If (level is NB) and (rate is 正大) then (valve is 不动) (1) 6)If (level is NM) and (rate is 负大) then (valve is 快关) (1) 7)If (level is NM) and (rate is 负小) then (valve is 快关) (1) 8)If (level is NM) and (rate is 不变) then (valve is 快关) (1) 9)If (level is NM) and (rate is 正小) then (valve is 中关) (1)10)If (level is NM) and (rate is 正大) then (valve is 不动) (1) 11)If (level is NS) and (rate is 负大) then (valve is 中关) (1) 12)If (level is NS) and (rate is 负小) then (valve is 中关) (1) 13)If (level is NS) and (rate is 不变) then (valve is 中关) (1) 14)If (level is NS) and (rate is 正小) then (valve is 不动) (1) 15)If (level is NS) and (rate is 正大) then (valve is 慢开) (1) 16)If (level is ZE) and (rate is 负大) then (valve is 中关) (1) 17)If (level is ZE) and (rate is 负小) then (valve is 慢关) (1) 18)If (level is ZE) and (rate is 不变) then (valve is 不动) (1)19)If (level is ZE) and (rate is 正小) then (valve is 慢开) (1) 20)If (level is ZE) and (rate is 正大) then (valve is 中开) (1) 21)If (level is PS) and (rate is 负大) then (valve is 慢关) (1) 22)If (level is PS) and (rate is 负小) then (valve is 不动) (1) 23)If (level is PS) and (rate is 不变) then (valve is 中开) (1) 24)If (level is PS) and (rate is 正小) then (valve is 中开) (1) 25)If (level is PS) and (rate is 正大) then (valve is 中开) (1) 26)If (level is PM) and (rate is 负大) then (valve is 不动) (1) 27)If (level is PM) and (rate is 负小) then (valve is 中开) (1) 28)If (level is PM) and (rate is 不变) then (valve is 快开) (1) 29)If (level is PM) and (rate is 正小) then (valve is 快开) (1) 30)If (level is PM) and (rate is 正大) then (valve is 快开) (1) 31)If (level is PB) and (rate is 负大) then (valve is 不动) (1) 32)If (level is PB) and (rate is 负小) then (valve is 中开) (1) 33)If (level is PB) and (rate is 不变) then (valve is 快开) (1) 34)If (level is PB) and (rate is 正小) then (valve is 快开) (1) 35)If (level is PB) and (rate is 正大) then (valve is 快开) (1) 这35条模糊控制规则的权重都为1、图6 模糊控制规则的设定(5)利用编辑器的 to Workspace, 将当前的模糊推理系统,以shuiwei1保存到工作空间中。


基于MATLAB水箱液位控制系统的设计水箱液位控制系统是水处理领域的一个重要应用,可以实现对水箱液位的监测和控制。
本文将基于MATLAB平台设计一个水箱液位控制系统,并详细介绍其工作原理、设计步骤和实现方法。
1.设计目标和原理设计目标是实现水箱液位的实时监测和自动控制,保持液位在设定值附近波动。
系统原理是通过传感器实时检测水箱液位,将液位信号传输给控制器进行处理,控制器根据设定值和实际液位偏差调整执行机构的动作,使液位保持在设定值范围内。
2.设计步骤(1)确定传感器和执行机构:选择合适的液位传感器和执行机构,如浮球传感器和电动阀门。
(2)建立数学模型:根据系统特性建立数学模型,描述液位与传感器输出和执行机构控制信号之间的关系。
(3)设计控制器:根据液位模型设计控制器,如PID控制器。
(4)编写MATLAB程序:使用MATLAB编写程序,实现液位监测、控制器设计和控制信号输出。
3.系统实现方法(1)建立模拟环境:在MATLAB中建立水箱液位模拟环境,包括液位模型、传感器模型和执行机构模型。
(2)液位监测:读取传感器输出信号,获取实时液位信息。
(3)控制器设计:根据实时液位和设定值计算控制信号,可以使用PID控制器进行设计。
(4)控制信号输出:将控制信号发送给执行机构,实现对阀门的开关控制。
(5)反馈调整:根据执行机构的反馈信号对控制器参数进行调整,以进一步优化系统性能。
4.系统性能指标和优化(1)稳定性:控制系统在干扰的情况下能够保持液位稳定。
(2)响应速度:控制系统对液位变化的响应速度,可以通过调整控制器参数来实现快速响应。
(3)偏差:控制系统的液位偏差大小,可以通过调整控制器参数和设定值来控制偏差范围。
(4)抗干扰性能:控制系统对外界干扰(如水源变化)的抵抗能力。
(5)稳定性分析:通过系统稳定性分析,确定系统参数的合理范围。
(6)优化方法:通过试验和仿真,不断调整控制器参数和设定值,以实现最佳控制效果。

基于Matlab模糊控制器HDL代码的自动生成诸葛俊贵【摘要】This article, taking the Water Level Control in a Tank as an example, proposes a fuzzy controller automatic HDL code generation method based on Matlab. The generated code can be ported to the FPGA control system. The method is divided into four steps :( 1 ) The fuzzy controller is designed using Fuzzy Logic Toolbox in the Matlab. (2) The fuzzy controller is transformed into the form of Lookup Table. (3) The controller Lookup table is implemented with the state machine. (4) The fuzzy controller implementation with state machine was translated into HDL code by HDL Coder.%以水箱液位控制为例,提出了一种基于Maflab的模糊控制器HDL代码自动生成方法,生成的代码可以移植到FPGA控制系统上。
该方法分4个步骤:(1)利用Maflab的FuzzyLogic工具箱设计模糊控制器。
(2)将模糊控制器转换为LookupTable的形式。
(3)将制作好的控制器查找表用状态机实现。
(4)用HDLCoder将状态机实现的模糊控制器翻译成HDL代码。
【期刊名称】《电子科技》【年(卷),期】2012(025)001【总页数】4页(P42-44,47)【关键词】FPGA;Matlab;Simulink;模糊控制器;Lookup;Table;状态机;HDL;Coder【作者】诸葛俊贵【作者单位】上海师范大学精密机电系统与控制工程研究室,上海201418【正文语种】中文【中图分类】TP273.4经典和现代控制理论都是建立在被控对象具有精确数学模型的基础上,而实际应用中的许多系统很难用精确的数学模型来描述,难以建模,无法确定控制过程的传递函数和状态方程[1]。

浙江科技学院学报,第19卷第1期,2007年3月Jo ur na l of Zhejiang U niv ersity of Science and T echnolog y Vo l.19No.1,M ar.2007收稿日期:2006-12-13作者简介:孙勇智(1972 ),男,山东安丘人,讲师,博士,主要从事智能控制和嵌入式系统研究。
基于组态软件和MATLAB 的水位模糊控制系统孙勇智a,于海蓉b(浙江科技学院a.自动化与电气工程学院;b.后勤服务公司,杭州310023)摘 要:提出了一种利用M CG S 组态软件和M AT LA B 开发的水位模糊控制系统实现方案。
在该系统中,利用组态软件M CGS 完成数据采集、控制信息输出以及人机交互等工作,利用M A T L A B 完成模糊控制算法运算,在M A T-L A B 和M CGS 之间通过动态数据交换(DDE)协议对过程变量、控制变量和设定值实时更新。
通过对水箱的控制实验,结果表明该系统是可行的,并且具有较好的开放性和灵活性。
关键词:组态软件;动态数据交换;模糊控制中图分类号:T P273.4 文献标识码:A 文章编号:1671-8798(2007)01-0014-04Fuzzy Control System for Water Level Based onConfiguration Software and MATLABSUN Yong -zhi a,YU H a-i rongb(a.Schoo l o f Automat ion and Electr ical Engineer ing;b.Co rpor atio n o f General Ser vice,Zhejiang U niver sity of Science and T echnolog y,H angzhou 310023,China)Abstract:T he fuzzy contr ol system for w ater level integ rates MAT LAB and M CGS,w hich is a config uration softw are.Data acquisition,co ntro l actio n and human -machine interface are de -signed w ith M CGS,and fuzzy contr ol arithm etic is designed w ith M AT LA B.The pro cess varia -bles,m anipulations v ar iables and set points are updated rea-l timely betw een M CGS and M ATLAB by Dy nam ic Data Ex change (DDE)protocol.Ex perim ents dem onstrate the feasibility,flexibility and openness of the sy stem.Key words:configuratio n so ftw are;dynam ic data ex chang e;fuzzy co ntrol 工业控制计算机(简称工控机)在计算机控制领域占据越来越重要的地位,在基于工控机的控制系统中,基本上都采用组态软件实现系统的开发和监控。

模糊控制在matlab中的实例以下是一个模糊控制在MATLAB中的简单实例:假设我们要设计一个模糊控制器来控制一个水箱中水位的高低。
我们可以先建立一个模糊推理系统,其中包含输入和输出变量以及规则。
1. 输入变量:水箱中的水位(假设范围为0到100)。
2. 输出变量:水泵的流量(假设范围为0到10)。
我们需要定义一组模糊规则,例如:如果水箱中的水位为低,则水泵的流量为低。
如果水箱中的水位为中等,则水泵的流量为中等。
如果水箱中的水位为高,则水泵的流量为高。
将这些规则转换成模糊集合,如下所示:输入变量:- 低:[0, 30]- 中等:[20, 50]- 高:[40, 100]输出变量:- 低:[0, 3]- 中等:[2, 6]- 高:[4, 10]接下来,我们可以使用MATLAB的Fuzzy Logic Toolbox来建立模糊推理系统。
以下是一个简单的MATLAB脚本:```% 定义输入变量water_level = fisvar("input", "Water Level", [0 100]); water_level.addmf("input", "low", "trapmf", [0 0 30 40]); water_level.addmf("input", "medium", "trimf", [20 50 80]);water_level.addmf("input", "high", "trapmf", [60 70 100 100]);% 定义输出变量pump_flow = fisvar("output", "Pump Flow", [0 10]);pump_flow.addmf("output", "low", "trapmf", [0 0 3 4]); pump_flow.addmf("output", "medium", "trimf", [2 6 8]); pump_flow.addmf("output", "high", "trapmf", [7 8 10 10]); % 建立模糊推理系统rule1 = "If Water Level is low then Pump Flow is low"; rule2 = "If Water Level is medium then Pump Flow is medium"; rule3 = "If Water Level is high then Pump Flow is high"; rules = char(rule1, rule2, rule3);fis = newfis("Water Tank Fuzzy Controller");fis = addvar(fis, water_level);fis = addvar(fis, pump_flow);fis = addrule(fis, rules);% 模糊控制器输入water_level_value = 70;% 运行模糊推理系统pump_flow_value = evalfis([water_level_value], fis);disp(["Water level: " num2str(water_level_value) "%"]); disp(["Pump flow: " num2str(pump_flow_value)]);```在这个简单的例子中,我们使用了Fuzzy Logic Toolbox来定义输入和输出变量以及规则,并运行模糊推理系统来计算输出值。


资料范本本资料为word版本,可以直接编辑和打印,感谢您的下载水箱液位的模糊控制地点:__________________时间:__________________说明:本资料适用于约定双方经过谈判,协商而共同承认,共同遵守的责任与义务,仅供参考,文档可直接下载或修改,不需要的部分可直接删除,使用时请详细阅读内容1、绪论1.1 水箱水位系统概述在能源、化工等多个领域中普遍存在着各类液位控制系统液。
各种控制方式在液位控制系统中也层出不穷,如较常用的浮子式、磁电式和接近开关式。
而随着我国工业自动化程度的提高,规模的扩大,在工程中液位控制的计算机控制得到越来越多的应用。
液位控制系统的检测及计算机控制已成为工业生产自动化的一个重要方面。
经典控制理论和现代控制理论的控制效果很大一部分取决于描述被控过程精确模型的好坏,这使得基于精确数学模型的常规控制器难以取得理想的控制效果。
但是一些熟练的操作工人、领域专家却可以得心应手的进行手工控制。
因此基于知识规则的模糊控控制理论在其应用中就有了理论和现实意义1.2模糊控制的概述人工智能包括推理、学习和联想三大要素,它是采用非数学式子方法,把人们的思维过程模型化,并用计算机来模仿人的智能的学科。
许多科学家认为下一世纪生产力的飞跃寄托于人工智能技术,并认为人工智能的发展必将带来一次新的史无前例的技术革命,第五代计算机的研究充分体现了人类左脑的逻辑推理功能,而人工智能研究的下一步是模仿人类右脑的模糊处理功能。
人工智能将在逻辑推理计算机、模糊计算机和神经网络计算机这三者的基础上,由两个方面来实现,即:一是利用现有的计算机技术模拟人类的智能;二是利用一种全新的技术来实现信息处理的模糊化和网络化。
前者是实现人工智能必需的先决条件;后者是实现人工智能的根本途径。
“模糊控制理论”是由美国学者加利福尼亚大学著名教授L.A.Zadeh于1965年首先提出,至今仅有20余年时间。
它以模糊数学为基础,用语言规则表示方法和先进的计算机技术,由模糊推理进行判决的一种高级控制策略。

目录前言1.模糊控制概述模糊控制的产生及特点 (3)模糊控制技术的发展 (4)模糊控制理论的研究现状 (5)2.模糊推理原理模糊控制的基本工作原理 (6)3.基于MATLAB的水箱供水模糊控制水箱水位模糊控制系统设计 (8)小结............ ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・16参考文献 (17)-•、—1—冃IJ §随着社会经济的迅速发展,水对人们生活与工业生产的影响越来越重要,尤其是近儿年,随着居民生活水平的显著提高和城市化进程的加快,居民生活用水和工业用水增长幅度加大,原有的供水系统已经不能满足人们的需求。
为了保证正常的供水,这里应用模糊控制技术,实现对水箱水位的自动控制。
3、基于MATLAB的水箱供水模糊控制水箱水位模糊控制系统设计本系统设计基于MATLAB图形模糊推理系统,设计步骤如下:(1)打开MATLAB,输入指令fuzzy,打开模糊逻辑工具箱的图形用户界面窗口,新建一个Mamdani模糊推理系统。
图FIS Editor窗口中新建水位控制模糊推理系统(2)增加一个输入变量,将输入变量命名为水位误差、误差变化,将输出变量命名为阀门开关速度。
这样就建立了一个两输入单输出的模糊推理系统,保存为。
图增加一个输入变量(3) 设计模糊化模块:设水位误差的论域为[-1 1],误差变化 的论域为[];两个输入量的模糊集都定为5个:其中水位误差定为高、偏 高、合适、偏低、低五等;参数分别为[-1]、[ ]、[0]、[]、 [1]; Current Varidbte Nome Tpqe £yVcm ^huiMono : 2 inpdts, 1 oulpU z ord 24 ruleI rrin I max ceriroid rnn And method Or methodImplicationAggregalbn Dcfuzzficotion input (11) |水位魅 FIS Name: shuxiara FIS Tvpe: maiidcniCloseRange图设汁水位误差模块误差变化分为大、偏大、合适、偏小、小五等。


自动控制原理实践教学的改革与探究-以基于MATLAB实时控制的水箱液位控制实验为例于建均;李慧杰;乔俊飞;杨金福;韩红桂;严爱军【摘要】Automatic Control Theory is the core foundation course in theprofessional of information and control, its practical teaching program not only takes on the tasks of comprehending, consolidating, deepening the theoretical knowledge through the class teaching, but also is the link between theory and practical application. In the practical teaching program of Automatic Control Theory, Experiment System is constructed based on MATLAB Real-Time Control module: Controller is debugged in the Simulink Module of MATLAB, the control signal is sent to the physical object model by means of multi-function card PCI1711.This practical teaching methods could organic bond the theory knowledge and practical application. Not only Implemented control action to the physical object, but also avoided the complex programming problem in the traditional real-time control. The running and debugging of the system is succinct and visual, and the efifciency of experiment has been improved.%自动控制原理是信息控制类专业的核心基础课程,其实践教学环节不仅担负着理解、巩固、加深课堂教学理论知识的任务,同时也是理论与实践应用之间的纽带。
