光电传感器物体位置检测
- 格式:ppt
- 大小:1.89 MB
- 文档页数:29
简述常见位置检测装置及维护一、引言位置检测装置是工业生产中常用的设备,用于检测和测量物体的位置和运动状态。
它广泛应用于自动化生产线、机器人控制、医疗设备等领域。
本文将详细介绍常见的位置检测装置及其维护方法。
二、常见位置检测装置1. 光电传感器:光电传感器是一种使用光电效应进行检测的装置,通过光源和接收器组成,当被检测物体经过时,会遮挡光线,使接收器输出信号。
它主要用于检测物体是否到达指定位置或者是否存在。
2. 激光传感器:激光传感器是一种使用激光进行检测的装置,可以精确地测量物体的距离和位置。
它主要用于自动化生产线上对产品尺寸和形状的精确检测。
3. 磁性传感器:磁性传感器是一种使用磁场进行检测的装置,可以通过磁场变化来判断物体是否存在或者运动状态。
它主要应用于机械制造、航空航天等领域。
4. 压力传感器:压力传感器是一种使用压力进行检测的装置,可以测量物体的重量、压力和强度等参数。
它主要用于医疗设备、汽车制造等领域。
5. 触觉传感器:触觉传感器是一种模拟人类触觉的装置,可以精确地感知物体质地、形状和温度等信息。
它主要应用于机器人控制、医疗设备等领域。
三、位置检测装置维护方法1. 定期清洁:位置检测装置在使用过程中会受到灰尘和污垢的影响,影响检测精度。
因此,定期清洁是必要的。
可以使用软布或者专业清洁剂进行清洁,但要避免使用含酸性或碱性成分的清洁剂。
2. 检查电源:位置检测装置需要接通电源才能正常工作,因此需要定期检查电源线路是否正常连接,是否有松动或损坏现象。
同时还需要定期更换电池或者充电,确保电量充足。
3. 检查信号线路:位置检测装置通过信号线路与其他设备进行连接,在使用过程中可能会出现信号线路松动或者损坏的情况。
因此,需要定期检查信号线路连接是否正常,并及时更换损坏的信号线路。
4. 定期校准:位置检测装置在长时间使用后可能会出现误差,因此需要定期进行校准。
可以通过专业的校准工具或者软件进行校准。
光电传感器的测量内容
光电传感器是一种将光信号转换为电信号的传感器,它可以测量多种物理量和参数,以下是一些常见的测量内容:
1. 光强度:光电传感器可以测量光的强度,通常用于光照度计、光度计等仪器中,用于测量环境中的光强。
2. 光通量:光通量是指单位时间内通过某一面积的光能量,光电传感器可以测量光通量,常用于光功率计等仪器中。
3. 光波长:一些光电传感器可以测量光的波长,常用于光谱仪等仪器中,用于分析光的成分和特性。
4. 距离和位置:通过测量光的传播时间或相位差,光电传感器可以测量物体的距离和位置,常用于工业自动化、机器人、汽车等领域。
5. 运动和速度:利用光的反射或遮挡原理,光电传感器可以检测物体的运动和速度,常用于安防监控、工业检测等领域。
6. 颜色和色彩:一些光电传感器可以识别光的颜色和色彩,常用于颜色分选机、色度计等仪器中。
7. 气体和液体成分:利用光的吸收或散射特性,光电传感器可以检测气体和液体中的成分,常用于环境监测、化学分析等领域。
这只是一些常见的光电传感器测量内容,实际上,根据具体的应用和传感器类型,还可以测量其他物理量和参数。
光电传感器具有高精度、快速响应、非接触测量等优点,在各个领域得到广泛应用。
欧姆龙对射光电l,d旋钮的作用
光电l,d旋钮是欧姆龙公司生产的一种传感器,其主要功能是检测物体的存在与否。
通过发射红外光束并接收反射光束,该传感器可以准确地判断物体是否在其检测范围内。
在工业自动化领域,光电l,d 旋钮被广泛应用于物体检测、位置控制和物流系统等方面。
一、物体检测
光电l,d旋钮能够可靠地检测物体的存在与否。
当物体进入光电l,d 旋钮的检测范围内时,光束被物体遮挡,传感器会发出信号,告知系统物体已经被检测到。
这种物体检测功能在自动化生产线上非常重要,可以用于物体分拣、装配过程中的定位和检测等环节。
二、位置控制
光电l,d旋钮能够精确地检测物体的位置,通过与其他传感器和控制器的联动,可以实现物体在特定位置的控制。
例如,在自动化仓储系统中,光电l,d旋钮可以用于检测货物在传送带上的位置,从而控制其进一步的运输和分拣。
三、物流系统
光电l,d旋钮在物流系统中也扮演着重要的角色。
通过安装在货物运输设备上,光电l,d旋钮可以实时监测货物的位置和状态,确保货物的安全和准确运输。
此外,光电l,d旋钮还可以被应用于货物的计数、分拣和定位等环节,提高物流系统的效率和准确性。
总结:
欧姆龙的光电l,d旋钮在物体检测、位置控制和物流系统等领域都具有重要的作用。
其可靠的检测功能和精确的位置控制能力,为自动化生产线和物流系统的运行提供了重要支持。
通过光电l,d旋钮的应用,可以实现自动化、高效和准确的物体检测、位置控制和物流管理,提升生产效率和质量。
欧姆龙光电l,d旋钮的技术优势和广泛应用,使其成为工业自动化领域中不可或缺的重要组成部分。
电眼的工作原理
电眼是一种光电传感器,使用光电二极管和光敏元件来检测物体的存在和位置。
其工作原理可以简单分为两个步骤。
首先,电眼发出一束红外线或激光光束。
当这束光线遇到物体时,一部分光会被物体吸收,一部分光会被反射回来。
其次,光电二极管或光敏元件接收到反射回来的光。
这些光会被转化为电信号,并传送给电路进行处理和分析。
通过测量接收到的光信号的强度和时间,电眼可以判断物体的存在和位置。
当物体遮挡住光束时,接收到的反射光信号会减弱或消失,从而触发电眼的输出信号。
电眼通常应用于自动检测和控制系统中,如流水线上的物体检测、门禁系统的入侵检测等。
它具有快速、准确和无接触的特点,在工业和安防领域得到广泛应用。
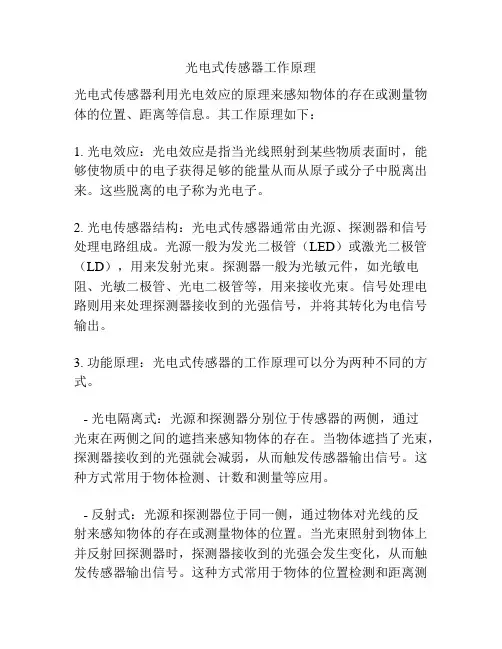
光电式传感器工作原理
光电式传感器利用光电效应的原理来感知物体的存在或测量物体的位置、距离等信息。
其工作原理如下:
1. 光电效应:光电效应是指当光线照射到某些物质表面时,能够使物质中的电子获得足够的能量从而从原子或分子中脱离出来。
这些脱离的电子称为光电子。
2. 光电传感器结构:光电式传感器通常由光源、探测器和信号处理电路组成。
光源一般为发光二极管(LED)或激光二极管(LD),用来发射光束。
探测器一般为光敏元件,如光敏电阻、光敏二极管、光电二极管等,用来接收光束。
信号处理电路则用来处理探测器接收到的光强信号,并将其转化为电信号输出。
3. 功能原理:光电式传感器的工作原理可以分为两种不同的方式。
- 光电隔离式:光源和探测器分别位于传感器的两侧,通过
光束在两侧之间的遮挡来感知物体的存在。
当物体遮挡了光束,探测器接收到的光强就会减弱,从而触发传感器输出信号。
这种方式常用于物体检测、计数和测量等应用。
- 反射式:光源和探测器位于同一侧,通过物体对光线的反
射来感知物体的存在或测量物体的位置。
当光束照射到物体上并反射回探测器时,探测器接收到的光强会发生变化,从而触发传感器输出信号。
这种方式常用于物体的位置检测和距离测
量等应用。
总的来说,光电式传感器利用光电效应,通过光源和探测器的组合来感知物体的存在或测量物体的位置、距离等信息。
不同的工作方式可以适用于不同的应用场景。
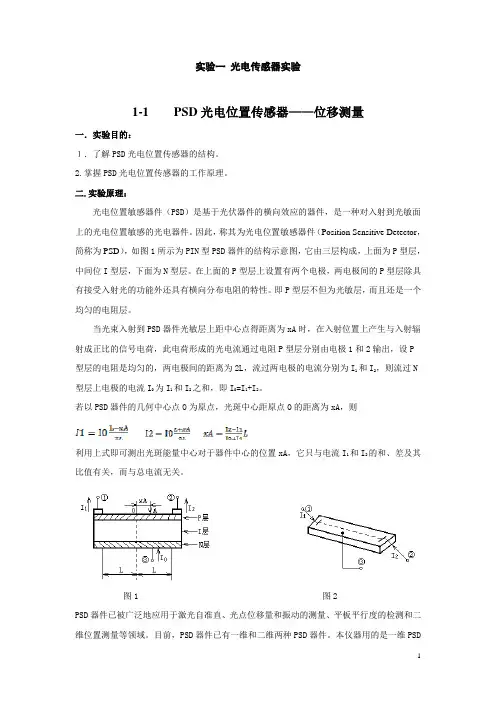
实验一光电传感器实验1-1 PSD光电位置传感器——位移测量一.实验目的:1.了解PSD光电位置传感器的结构。
2.掌握PSD光电位置传感器的工作原理。
二.实验原理:光电位置敏感器件(PSD)是基于光伏器件的横向效应的器件,是一种对入射到光敏面上的光电位置敏感的光电器件。
因此,称其为光电位置敏感器件(Position Sensitive Detector,简称为PSD),如图1所示为PIN型PSD器件的结构示意图,它由三层构成,上面为P型层,中间位I型层,下面为N型层。
在上面的P型层上设置有两个电极,两电极间的P型层除具有接受入射光的功能外还具有横向分布电阻的特性。
即P型层不但为光敏层,而且还是一个均匀的电阻层。
当光束入射到PSD器件光敏层上距中心点得距离为xA时,在入射位置上产生与入射辐射成正比的信号电荷,此电荷形成的光电流通过电阻P型层分别由电极1和2输出,设P型层的电阻是均匀的,两电极间的距离为2L,流过两电极的电流分别为I1和I2,则流过N 型层上电极的电流I0为I1和I2之和,即I0=I1+I2。
若以PSD器件的几何中心点O为原点,光斑中心距原点O的距离为xA,则利用上式即可测出光斑能量中心对于器件中心的位置xA,它只与电流I1和I2的和、差及其比值有关,而与总电流无关。
图1 图2PSD器件已被广泛地应用于激光自准直、光点位移量和振动的测量、平板平行度的检测和二维位置测量等领域。
目前,PSD器件已有一维和二维两种PSD器件。
本仪器用的是一维PSD器件,主要用来测量光斑在一维方向上的位置或移动量的装置,图2为一维PSD器件的原理图,其中①和②为信号电极,③为公共电极。
它的光敏面为细长的矩形条。
图3为其等效电路,它由电流源Ip、理想二极管VD、结电容Cj、横向分布电阻RD和并联电阻Rsh组成, PSD器件属于特种光伏器件,它的基本特性与一般硅光伏器件基本相同,如光谱响应、时间响应和温度响应等与前面讲述的PN结光伏器件相同。
位置传感器的原理和应用有哪些一、位置传感器的原理位置传感器是一种能够感知和测量物体相对位置的装置。
它基于某种物理原理,通过测量物体的位移或位置来获取相关信息。
以下是几种常见的位置传感器原理:1.光电传感器:光电传感器利用光电效应,通过光线的阻断或反射来检测物体的位置。
常见的光电传感器包括光电开关、光电编码器等。
2.压力传感器:压力传感器利用物体所受到的压力大小来测量其位置。
压力传感器广泛应用于工业领域,用于测量液体或气体的压力,从而推测物体的位置。
3.接触式传感器:接触式传感器通过物体与传感器之间的接触,来感知物体的位置。
常见的接触式传感器包括接近开关、触点式开关等。
4.磁性传感器:磁性传感器利用物体产生的磁场变化来检测物体的位置。
磁性传感器通常包括霍尔效应传感器、磁电阻传感器等。
5.超声波传感器:超声波传感器利用超声波的传播时间和返回时间来测量物体的位置。
这种传感器常用于测量距离和检测物体的接近情况。
二、位置传感器的应用位置传感器在各个领域都有广泛的应用。
以下是一些常见的应用领域:1.汽车工业:位置传感器在汽车工业中得到广泛应用。
它们用于测量车辆中各种部件的位置,如气门位置、转向角度、加速踏板位置等。
这些数据可用于车辆控制系统的运作,如发动机控制、转向控制和刹车控制等。
2.航空航天:在航空航天领域,位置传感器用于测量飞机、卫星和飞船等物体的位置和姿态。
它们能够提供精确的定位信息,帮助飞行器进行准确导航、定位和姿态调整。
3.智能手机和平板电脑:智能手机和平板电脑中的位置传感器通常采用加速度计、陀螺仪和磁力计等技术,用于检测设备的方向、倾斜和位置变化。
这些传感器使设备能够实现自动旋转屏幕、地图导航和游戏操控等功能。
4.工业自动化:在工业自动化中,位置传感器用于检测物体的位置、速度和方向。
它们可以帮助机器人、流水线和自动化设备实现准确和高效的操作。
5.医疗领域:在医疗设备中,位置传感器用于测量患者的体位、运动和姿态等信息。
光电式传感器光电式传感器是一种通过光信号来检测物体的位置、形状和颜色等信息的传感器。
它主要由光电元件、放大器电路、信号处理电路和输出电路等组成,可广泛应用于机器人、自动化生产线、计量仪器、安防监控等领域。
工作原理光电式传感器的主要工作原理是利用光电元件对物体反射和透射的光信号进行检测。
它通过发射一束光线照射到被探测物体上,然后检测被反射和透射的光线的强度、频率、相位等参数来确定被探测物体的存在和状态。
光电元件一般采用光电二极管、光敏电阻、光电管、光电晶体管等,而光线的发射和收集一般通过透镜、光纤和反光镜等实现。
分类及应用根据不同的工作原理和应用场景,光电式传感器可以分为多种类型。
其中比较常见的有:接近式光电传感器接近式光电传感器是一种最常用、最简单的光电式传感器。
它主要通过发射一束红外线照射到被测物体上,然后检测透射回来的光线的强度变化来判断被测物体是否存在。
接近式光电传感器广泛应用于人体检测、自动门、安全门和计量系统等方面。
光电开关光电开关是一种通过光电元件来检测、开关电路的传感器。
它主要通过发射一束光线来检测物体的存在和位置等信号,然后将信号(一般为0和1)传递给输出模块,以实现开闭等控制功能。
光电开关广泛应用于自动化生产线、安全门、包装机械、自动售货机等领域。
光电码盘光电码盘是一种通过光学编码来进行位置检测的传感器。
它主要通过在码盘的表面上覆盖光学码来检测旋转物体的位置、角度、方向等信息。
光电码盘广泛应用于电机控制、机器人、航空航天、导航和工业自动化等领域。
处理技术光电式传感器的检测精度和稳定性直接关系到其应用效果和可靠性。
因此,传感器制造商一直致力于探索改进传感器的处理技术。
目前,主要的处理技术包括增益调整、滤波、线性化、自动校正等。
其中增益调整是通过调整放大器的增益来提高传感器的灵敏度和稳定性,滤波则是通过滤除噪音信号来提高传感器的检测精度。
而线性化和自动校正则是通过将传感器输出信号进行线性化处理和自动调整校准,来提高传感器的可靠性和准确性。
位置传感器的工作原理
位置传感器通常根据其测量原理的不同,可以分为多种类型。
以下是其中几种常见的位置传感器的工作原理描述:
1. 光电式位置传感器: 光电式位置传感器利用光的反射或透射原理来检测物体的位置。
该传感器通常包括一个光源和一个光敏元件,光源发射光线照射在被测物体上,光敏元件接收光线并将其转换为电信号。
通过测量接收到的光信号的强度变化,可以确定被测物体的位置。
2. 磁性位置传感器: 磁性位置传感器通过检测磁场的强度和方向来确定物体的位置。
传感器通常包含一个磁场发生器和一个磁场感应器。
磁场发生器产生一个磁场,而磁场感应器测量该磁场的强度和方向。
物体的位置可以通过磁场感应器接收到的磁场信号来确定。
3. 声波式位置传感器: 声波式位置传感器利用声波的传播速度和回声原理来测量物体的位置。
传感器通常包括一个声波发射器和一个声波接收器。
声波发射器发射出一个声波信号,当声波信号遇到被测物体并反射回传感器时,声波接收器接收到回声信号。
通过测量声波的往返时间,可以计算得出物体与传感器之间的距离,从而确定物体的位置。
4. 电感式位置传感器: 电感式位置传感器利用线圈中感应出的电感变化来确定物体的位置。
传感器通常包括一个固定线圈和一个移动线圈。
当被测物体靠近或远离传感器时,移动线圈和固定线圈之间的电感值会发生变化。
通过测量电感值的变化,
可以确定被测物体的位置。
这些是常见的位置传感器的工作原理描述,具体的传感器类型和工作原理可能还有其他的,但无论如何,位置传感器一般都通过测量物体与传感器之间的某种物理量的变化来确定物体的位置。
传感器如何用于测量物体的位置和运动?一、测量物体位置的传感器应用1. 光电传感器的原理和应用光电传感器是一种能够将光信号转变为电信号的装置,它广泛应用于测量物体的位置和运动。
通过测量光的强度和位置,可以准确地确定物体的位置信息。
光电传感器被广泛应用于自动化控制、机器人技术、工业生产、安防监控等领域,为这些领域提供了精确可靠的位置检测功能。
2. 激光传感器的原理和应用激光传感器利用激光束与物体相互作用产生散射和反射,通过测量散射和反射的激光信号,可以准确地测量物体的位置和形状。
激光传感器具有高精度、快速响应和长测量距离等特点,被广泛应用于测量、检测和导航等领域。
例如,在三维扫描中,激光传感器可以用来获取物体的三维形状和位置信息,实现快速高精度的测量和识别。
二、测量物体运动的传感器应用1. 加速度传感器的原理和应用加速度传感器是一种能够测量物体在加速度方向上的加速度的装置。
通过测量物体产生的力或压力的变化,可以间接测量物体的加速度。
加速度传感器广泛应用于运动控制、姿态检测、智能手机、健康监测等领域,为这些领域提供了准确的加速度测量和监测功能。
2. 陀螺仪的原理和应用陀螺仪是一种能够测量物体的旋转和转动的装置。
通过测量物体围绕着其自身轴线的旋转角速度,可以确定物体的转动情况。
陀螺仪广泛应用于导航、飞行控制、惯性导航、无人机等领域,为这些领域提供了精确的旋转和转动测量功能。
3. 磁力计的原理和应用磁力计是一种能够测量物体周围磁场强度和方向的装置。
通过测量物体所处位置的磁场强度和方向的变化,可以准确地确定物体的运动情况。
磁力计广泛应用于导航、地磁监测、磁力分析等领域,为这些领域提供了准确的位置和运动测量功能。
三、传感器在智能工业领域的应用前景1. 自动化生产的发展趋势和挑战随着科技的发展和工业化进程的加快,自动化生产已成为许多工业领域的发展趋势。
传感器作为自动化生产中的重要组成部分,正发挥着越来越重要的作用。
光电式传感器的结构和功能光电式传感器是一种常用的传感器,它利用光电效应将光信号转化为电信号,从而实现对光照强度的检测和测量。
该传感器的结构和功能十分重要,下面我将为您详细介绍。
一、结构光电式传感器主要由发光器、接收器、滤波器和输出电路等组成。
1. 发光器:发光器通常由发光二极管(LED)组成,它能够将电能转化为光能。
当电流通过LED时,LED会发出特定波长的光线,这些光线被用于照射待测物体。
2. 接收器:接收器通常由光敏电阻或光敏二极管(光电二极管)组成,它能够将光能转化为电能。
当接收器接收到照射物体反射回来的光线时,光敏元件会产生对应的电压或电流信号。
3. 滤波器:滤波器的作用是将非目标波长的光线滤除,只保留目标波长的光线。
通过选择合适的滤波器,可以提高光电式传感器的灵敏度和准确度。
4. 输出电路:输出电路负责将接收到的电信号进行放大、滤波和转换,最终输出一个与光照强度相关的电信号。
这个信号可以被连接到其他电路或设备中进行进一步的处理或控制。
二、功能光电式传感器具有广泛的应用,其功能主要体现在以下几个方面:1. 光照检测:光电式传感器能够检测环境中的光照强度,根据光照强度的变化来判断是否需要进行照明或调节照明强度。
2. 物体检测:通过测量物体反射的光线强度,光电式传感器能够实现对物体的检测。
例如,在自动门控制系统中,光电式传感器可以检测到人或物体的到来,从而触发门的开启或关闭。
3. 颜色识别:光电式传感器可以根据物体反射的光线波长来识别物体的颜色。
这在工业自动化和机器人领域有着重要的应用。
4. 位置测量:光电式传感器可以通过测量物体反射光线的强度来判断物体的位置。
这在自动化控制和机器人导航中具有重要意义。
总结:光电式传感器的结构和功能使其成为现代工业和生活中不可或缺的重要设备。
它能够准确地检测和测量光照强度,并根据需要进行相应的控制和处理。
光电式传感器的应用范围广泛,例如照明系统、自动控制和机器人领域等,为人们的生活带来了便利和高效。
红外光电传感器原理随着科技的不断发展,红外光电传感器在工业、医疗、安防等领域得到了广泛的应用。
红外光电传感器是一种能够检测物体周围环境温度和光强度变化的传感器,其原理是利用物体发射的红外辐射和反射的光信号来检测物体的位置、距离和形状等信息。
一、红外光电传感器的工作原理红外光电传感器的工作原理基于物体发射的红外辐射和反射的光信号。
物体发射的红外辐射是由物体本身的热能产生的,其波长范围在3μm至50μm之间。
红外光电传感器通过感知物体发射的红外辐射和反射的光信号来检测物体的位置、距离和形状等信息。
当物体发射的红外辐射或反射的光信号进入红外光电传感器时,传感器内部的光敏元件会产生电信号,并将信号转换成数字信号输出。
二、红外光电传感器的分类根据不同的工作原理和应用场景,红外光电传感器可以分为以下几类:1. 热成像传感器热成像传感器是一种利用物体发射的红外辐射来检测物体温度的传感器。
热成像传感器可以将物体发射的红外辐射转换成图像信号,从而实现对物体表面温度的无接触式测量。
热成像传感器广泛应用于工业、医疗、安防等领域。
2. 红外测距传感器红外测距传感器是一种利用物体反射的红外光信号来测量物体距离的传感器。
红外测距传感器可以通过发射红外光信号,然后测量反射光信号的时间差来计算物体到传感器的距离。
红外测距传感器广泛应用于机器人、智能家居等领域。
3. 红外遥控传感器红外遥控传感器是一种利用物体反射的红外光信号来实现遥控的传感器。
红外遥控传感器可以通过发射特定的红外光信号,然后接收被遥控设备反射回来的信号来实现遥控操作。
红外遥控传感器广泛应用于电视、空调、音响等电器设备。
三、红外光电传感器的应用红外光电传感器广泛应用于工业、医疗、安防等领域。
以下是红外光电传感器的一些应用场景:1. 工业领域红外光电传感器在工业领域中应用较为广泛,可以用于测量物体的温度、湿度、距离等参数。
例如,可以使用红外热像仪来检测机器设备的温度分布,以及使用红外测距传感器来测量物体的距离。
光电式传感器的检测方法光电式传感器是一种常见的传感器类型,它可以利用光电效应来检测目标物体的存在与否、位置或其他特定属性。
在本文中,我们将一步一步地介绍光电式传感器的检测方法。
第一步:确定检测目标在使用光电式传感器进行检测之前,我们首先需要确定我们要检测的目标是什么。
光电式传感器可以用来检测许多不同类型的物体,如金属、木材、纸张等。
根据目标物体的特性,我们可以选择合适的光电式传感器类型。
第二步:选择合适的光电式传感器根据目标物体的特性,我们可以选择合适的光电式传感器。
常见的光电式传感器类型包括对射式传感器、反射式传感器和光纤传感器。
对射式传感器由发光器和接收器组成,其工作原理是通过测量目标物体与传感器之间的光的遮挡程度来进行检测。
反射式传感器则是通过目标物体对发射出去的光进行反射来进行检测。
光纤传感器则通过传输光信号并检测信号的变化来进行检测。
第三步:安装光电式传感器一旦选择了合适的光电式传感器,我们需要将其正确地安装到目标物体的检测位置。
安装的位置和方式会影响传感器的检测性能。
通常情况下,光电式传感器应该被安装在一个适当的高度和角度,以便与目标物体进行有效的交互。
此外,我们还需要确保光电式传感器与外界环境的适应性,例如避免暴露在直接阳光下或湿度较高的环境中。
第四步:调整传感器的参数一旦光电式传感器安装完毕,我们需要根据具体的应用要求来调整传感器的参数。
这些参数包括灵敏度、响应时间、检测距离等。
通过调整这些参数,我们可以使光电式传感器适应不同的工作环境和目标物体的需求。
值得注意的是,在调整传感器参数时,我们需要根据实际情况进行适当的测试和调试,以确保传感器的准确性和稳定性。
第五步:进行测试和校准在光电式传感器安装和参数调整完成后,我们需要进行测试和校准来确保传感器的准确性和可靠性。
通过测试,我们可以验证光电式传感器是否能够准确地检测目标物体的存在与否,以及在不同条件下的工作性能。
如果测试结果不符合要求,我们可以根据实际情况进行校准,以提高传感器的检测性能。
反射板型光电传感器是一种常用的非接触式传感器,用于检测物体的存在或位置。
其检测距离要求标准会因具体应用场景和传感器型号而有所不同。
下面是一些常见的反射板型光电传感器检测距离要求的考虑因素:
1. 物体反射率:反射板型光电传感器的检测距离受到被检测物体的反射率影响。
通常来说,反射率较高的物体可以实现更长的检测距离。
例如,对于黑色物体,其反射率相对较低,因此可能需要较近的距离才能进行可靠的检测。
2. 光源和接收器性能:反射板型光电传感器的光源和接收器的性能也会影响检测距离要求。
高亮度的光源和高灵敏度的接收器可以提供较长的检测距离。
因此,在选择和设计传感器时,需要根据具体的光源和接收器参数评估其性能是否满足检测距离要求。
3. 环境光干扰:在实际应用中,环境光的干扰可能会影响反射板型光电传感器的检测距离。
如果环境中有强烈的光源(如太阳光),则可能需要更近的检测距离来确保可靠的检测。
4. 应用需求:不同的应用场景对于光电传感器的检测距离要求也有所不同。
有些应用需要更长的检测距离,以便在远距离上进行物体检测;而有些应用可能只需要较短的检测距离,因为被检测物体离传感器较近。
总结而言,反射板型光电传感器的检测距离要求标准是多方面因素共同作用的结果,包括被检测物体的特性、光源和接收器性能、环境光干扰以及具体的应用需求。
在选择和使用传感器时,需要综合考虑这些因素,并根据实际情况确定适合的检测距离要求。
光电开关传感器原理光电开关传感器是一种利用光电效应实现物体检测的传感器。
它通过发射光线并接收反射光线的方式,来判断物体是否存在或者位置是否正确。
光电开关传感器由光源、接收器和信号处理器组成,其工作原理基于光电效应。
光电效应是指在光照射下,材料中的电子吸收光子的能量,从而产生电子的运动。
这种效应是光电开关传感器工作的基础。
光电开关传感器的工作原理如下:1. 光源发射光线:光电开关传感器中的光源发射一束光线。
常见的光源有红外光源和激光光源。
红外光源通常使用红外发光二极管,而激光光源则使用激光二极管。
2. 光线照射物体:发射的光线照射到待检测的物体上。
物体可以是固体、液体或气体。
光线与物体交互作用,发生反射、散射或吸收。
3. 接收器接收反射光线:接收器接收反射的光线。
接收器通常采用光电二极管或光敏电阻。
4. 信号处理器处理信号:接收到的光线信号被传送到信号处理器中进行处理。
信号处理器根据接收到的光线强度、频率或波形,判断物体的存在与否、位置的准确性等。
光电开关传感器可以根据不同的工作原理分为不同类型。
常见的类型有:反射型、侧面型、对射型和纤维型等。
1. 反射型光电开关传感器:光源和接收器位于同一侧,通过物体对光线的反射来判断物体的存在与否。
适用于检测较大物体。
2. 侧面型光电开关传感器:光源和接收器位于同一侧,通过物体对光线的遮挡来判断物体的存在与否。
适用于检测较小物体。
3. 对射型光电开关传感器:光源和接收器位于相对的两侧,通过物体对光线的阻挡来判断物体的存在与否。
适用于检测较远距离的物体。
4. 纤维型光电开关传感器:光源和接收器通过光纤相连,通过物体对光纤的遮挡来判断物体的存在与否。
适用于检测狭小空间内的物体。
光电开关传感器具有灵敏度高、反应速度快、寿命长、抗干扰能力强等优点。
广泛应用于物体检测、位置测量、计数、自动控制等领域。
例如,自动门的开关、自动售货机的物品检测、流水线上产品的定位等。
光电开关传感器利用光电效应实现物体检测,通过发射光线并接收反射光线的方式来判断物体的存在与否。
位置感应器工作原理
位置感应器是一种能够探测并测量物体位置的设备。
它能够感知物体相对于感应器自身或其他已知参考点的位置坐标。
具体工作原理可以根据不同类型的位置感应器而有所不同,以下列举几种常见的工作原理:
1. 光电传感器:光电传感器利用光的传播及其与物体之间的相互作用,来感应并判断物体的位置。
例如,通过发射一束光和检测反射的光来判断物体的位置。
2. 音频传感器:音频传感器利用声音的传播和反射特性,通过检测声音的传播时间和振幅的变化来确定物体的位置。
3. 电容传感器:电容传感器利用电容的改变来感应物体的位置。
通过在物体和感应器之间形成一个电容,并测量电容的改变来判断物体的位置。
4. 磁感应器:磁感应器利用物体对磁场的响应来感应物体的位置。
通过生成一个磁场,并测量物体对磁场的变化来确定物体的位置。
5. 超声波传感器:超声波传感器利用超声波的传播和反射特性,通过测量发射超声波和接收反射超声波之间的时间差来判断物体的位置。
总的来说,位置感应器通过利用不同物理原理,如光、声音、
电容、磁场等,与物体进行相互作用并获取相关参数的变化来判断物体的位置。
这些感应器可以通过将测量结果与已知的参考点进行比较来确定物体的位置坐标。
光电编码器作为位置传感器的作用原理(一)光电编码器作为位置传感器的作用1. 介绍光电编码器光电编码器是一种常用的位置传感器,用于测量物体的位置和运动,它通过光学和电子技术实现对位置的准确检测。
光电编码器由光电传感器和信号处理器组成,能够将运动物体的位置信息转化为电信号,供控制系统使用。
2. 光电编码器的原理光电编码器的工作原理基于光电效应和编码原理。
它利用光电传感器接收到的光信号来测量物体的位置。
光电效应光电效应是指光线照射到物质表面时,光的能量转化为电子的能量的现象。
光电传感器中常用的光电效应有光电发射效应和光电导效应。
编码原理光电编码器利用光栅或光轮等编码结构,将运动物体的位移转换为特定的光信号序列。
常见的编码结构有增量式编码器和绝对式编码器。
增量式编码器增量式编码器通过光栅或光轮上的刻线,将一圈的运动分成多个小的步进。
光电传感器检测到光栅或光轮上的刻线变化,就能够获得物体运动的位移和方向信息。
增量式编码器的优点是简单、成本低,而缺点是不能直接获得物体的绝对位置。
绝对式编码器绝对式编码器通过光栅或光轮上的特殊编码结构,能够直接读取物体的绝对位置信息。
光电传感器检测到刻线时,通过特定的编码规则,可以生成唯一的二进制码或灰码,表示物体的位置。
绝对式编码器的优点是可以直接获得物体的绝对位置,具有较高的定位精度。
3. 光电编码器的应用光电编码器广泛应用于机器人、数控机床、自动化系统等领域,用于测量和控制运动物体的位置。
位置测量光电编码器能够精确测量物体的位置和位移,提供给控制系统进行位置反馈和控制。
在机器人领域,光电编码器可以用于测量机械臂的关节角度,实现精确的定位和运动控制。
倾斜检测光电编码器还可以用于检测物体的倾斜角度。
通过安装在物体上的倾斜传感器,结合光电编码器测量的位置信息,可以计算出物体的倾斜角度,并进行相应的控制。
光电编码器能够根据刻线的变化速度来测量物体的运动速度,从而实现对运动物体的速度控制。