《智能网联汽车技术概论》课件 - 第三章-雷达在智能网联汽车中的应用
- 格式:pptx
- 大小:83.79 MB
- 文档页数:70

第三章雷达在智能网联汽车中的应用本章小结本章的学习目标你已经达成了吗?请通过思考以下问题的答案进行结果检验。
序号问题自检结果1 汽车雷达有哪些类型?汽车雷达可分为超声波雷达、毫米波雷达、激光雷达。
2 简述超声波雷达的结构、原理和性能指标超声波雷达结构包括:导电螺杆、接线片、金属壳、保护膜、压电晶片。
超声波原理:超声波雷达利用超声波发生器产生超声波,然后接收探头接收障碍物反射的超声波,并根据超声波反射接收的时差计算出与障碍物的距离。
性能指标:工作频率、工作温度、灵敏度、多普勒效应、温度影响、噪声干扰、线性驱动干扰、机械特性等。
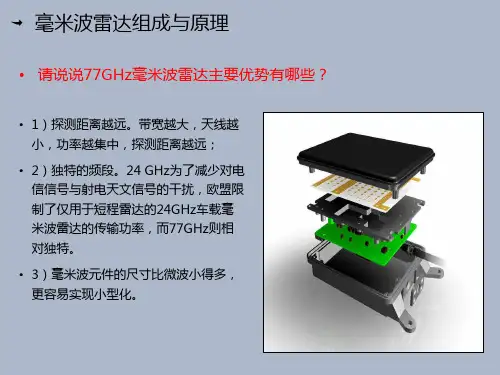
3 举例说明超声波雷达在智能网联汽车中的应用1)倒车辅助系统2)自动泊车系统4 简述毫米波雷达的结构、原理和特点结构:毫米波雷达系统结构主要包括天线、收发芯片、信号处理芯片等。
原理:毫米波雷达是通过发射和接收毫米波段的电磁波来测量车辆与车辆之间的距离、角度和相对速度的装置。
毫米波位于微波和远红外波重叠的波长范围内,根据波传播理论,频率越高,波长越短,分辨率越高,穿透能力越强,但传播过程中损耗越大,传输距离越短。
特点:分辨率高、方向性好、抗干扰能力强、检测性能好。
5 举例说明毫米波雷达在智能网联汽车中的应用实现自适应巡航控制、前向防撞报警、盲点检测、辅助停车、辅助变道、自主巡航控制等先进的巡航控制功能。
6 简述激光雷达的结构、原理、分类及特点结构:激光雷达机械部分主要由激光发射器、光学接收器、伺服电机、光学旋转编码器、倾斜镜等构成。
原理:激光雷达通过发射激光光束来扫描环境,并接收反射回来的光束获取检测数据,利用飞行时间测量法(Time of Flight)获取激光发射器到物体的距离,具体过程如图3-15所示:。