Proe运动仿真实例
- 格式:doc
- 大小:7.27 MB
- 文档页数:84
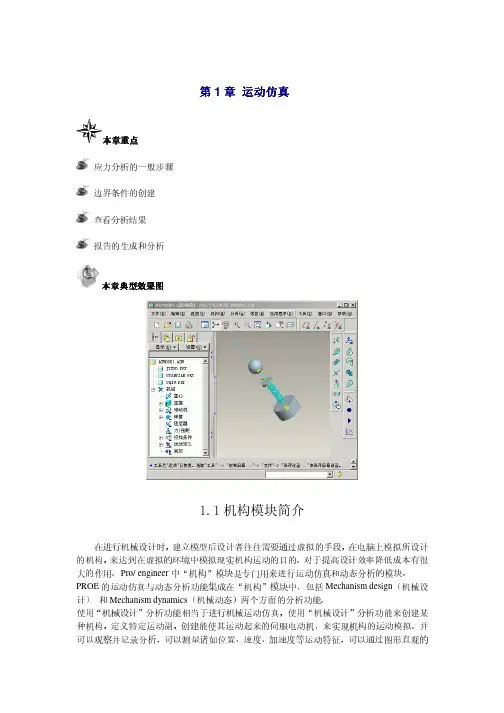
在PROE中进行单级圆柱齿轮副的运动仿真 在新的PROE(3以上版本)中可以使用齿轮副连接方式控制两个连接轴之间的速度关系,齿轮副中的每个齿轮都需要有两个主体和一个接头连接。
第一主体(指定为托架)通常保持固定不动。
第二主体能够运动,根据所创建的齿轮副的类型,可称为齿轮 、小齿轮或齿条。
齿轮副连接可约束两个连接轴的速度,但是不能约束接头连接的主体相对空间方位。
在齿轮副中,两个运动主体的表面不必相互接触就可以工作,因为齿轮副被视为速度约束。
并非基于模型几何,因此可直接指定齿轮比。
下面结合实例介绍使用齿轮副连接方式控制输入轴与输出轴之间速度比的基本操作方法,请注意体会其中的技巧知识。
创建单级圆柱齿轮减速器机构,然后进行运动仿真。
设计步骤一.新建一个名为“asm17-2”的文件(装配文件),采用毫米、牛、秒单位制,进入PROE的装配模块二.首先向装配文件中调入第一个零件“BASE.prt”,(这是一个装配的支架性的零件)操作过程如图所示:1选择“插入”,“元件”,“装配”命令或单击调入按钮,然后在系统弹出的“打开”对话框中选取零件“BASE”后,单击“打开”按钮,系统立即在绘图区中调入该零件。
2同时系统还弹出装配操控板,要求用户将打开的零件按照一定的装配约束关系进行空间定位,单击常规装配约束类型中的按钮表示系统将在默认位置装配该元件,即将该零件定义为机构的基础主体。
三.调入零件“gear1.prt”,然后创建第一个销钉连接,操作过程如下1选择“插入”,“元件”,“装配”命令或单击调入按钮然后在系统弹出的“打开”对话框中选取零件“gear1.prt”后,单击“打开”按钮,系统立即在绘图区中调入该零件。
2同时系统还弹出装配操控板,要求用户将打开的零件按照一定的装配约束关系进行空间定位,单击预定的连接集中的“销钉”连接方式。
在该零件(gear1)上选择轴线,在第一个零件(BASE)上选择轴线以定义轴对齐约束,然后分别选择两零件的对应圆柱端面以定义平移约束。

P R O E运动仿真教程本页仅作为文档封面,使用时可以删除This document is for reference only-rar21year.MarchPROE机构仿真之运动分析关键词:PROE仿真运动分析重复组件分析连接回放运动包络轨迹曲线术语创建机构前,应熟悉下列术语在PROE中的定义:主体 (Body) - 一个元件或彼此无相对运动的一组元件,主体内DOF=0。
连接 (Connections) - 定义并约束相对运动的主体之间的关系。
自由度 (Degrees of Freedom) - 允许的机械系统运动。
连接的作用是约束主体之间的相对运动,减少系统可能的总自由度。
拖动 (Dragging) - 在屏幕上用鼠标拾取并移动机构。
动态 (Dynamics) - 研究机构在受力后的运动。
执行电动机 (Force Motor) - 作用于旋转轴或平移轴上(引起运动)的力。
齿轮副连接 (Gear Pair Connection) - 应用到两连接轴的速度约束。
基础 (Ground) - 不移动的主体。
其它主体相对于基础运动。
接头 (Joints) - 特定的连接类型(例如销钉接头、滑块接头和球接头)。
运动 (Kinematics) - 研究机构的运动,而不考虑移动机构所需的力。
环连接 (Loop Connection) - 添加到运动环中的最后一个连接。
运动 (Motion) - 主体受电动机或负荷作用时的移动方式。
放置约束 (Placement Constraint) - 组件中放置元件并限制该元件在组件中运动的图元。
回放 (Playback) - 记录并重放分析运行的结果。
伺服电动机 (Servo Motor) - 定义一个主体相对于另一个主体运动的方式。
可在接头或几何图元上放置电动机,并可指定主体间的位置、速度或加速度运动。
LCS - 与主体相关的局部坐标系。
LCS 是与主体中定义的第一个零件相关的缺省坐标系。
曲柄滑块机构运动学仿真
1、目的
本文档旨在基于PROE4.0版本软件,设计一曲柄滑块机构,并仿真测量其关键点速度、加速度、位移等关键信息。
2、模型设计
2.1 整体尺寸介绍
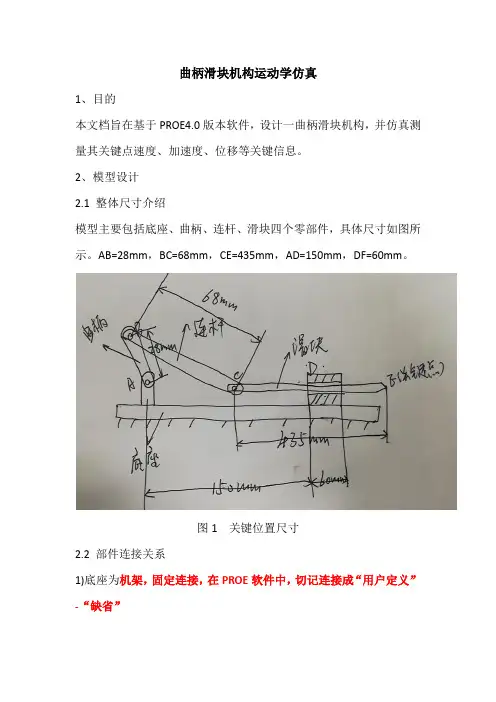
模型主要包括底座、曲柄、连杆、滑块四个零部件,具体尺寸如图所示。
AB=28mm,BC=68mm,CE=435mm,AD=150mm,DF=60mm。
图1 关键位置尺寸
2.2 部件连接关系
1)底座为机架,固定连接,在PROE软件中,切记连接成“用户定义”-“缺省”
2)曲柄与底座为“铰接”。
与连杆也为“铰接”。
3)滑块与底座为“滑动杆”连接。
4)连杆一端与曲柄为“铰接”;再新建一连接关系,与滑块“铰接”。
3、运动学仿真设置
1)在装配完成后,点击“应用程序”-“机构”菜单,进入机构仿真界面。
2)添加伺服电机驱动,设置成如图界面,并在“速度”一栏,点击“速度、位置、加速度”
3)仿真。
点击仿真按钮,设置成如图所示,选择“运动学”仿真,并点击“运行”,机构开始动作。
4)回放,保存。
仿真完成后,点击回放按钮,可以回放仿真,并进行保存。
5)测量。
仿真结束后,可以测量关键信息,如关键点速度、加速度、位置等,如图所示。
在左上角可以显示相应曲线。
6)仿真结束后,保存。
下一次运行时,可以读取相关数据。
CreoProe槽轮机构运动仿真
本篇文章主要分享:Creo/Proe槽轮机构运动仿真,在运动仿真中关于间歇运动的机构里槽轮机构是比较常见的一类,其典型结构由主动转盘、从动槽轮和机架组成,它常被用于将主动件的连续转动转换从从动件的带有停歇的单向周期性转动,下面的文章就结合典型的槽轮机构和大家一起分享槽轮机构的运动仿真装配与仿真过程,具体效果如下图:
机构装配过程
STEP1 新建装配文件,并导入机架,装配方式为:默认(Proe版本为:缺省)
STEP2 装配从动槽轮,装配方式为:销钉连接
①约束轴对齐
②约束平移
③约束旋转轴
STEP3 装配主动转盘,同样采用销钉连接。
旋转轴TOP平面和ASM_FRONT平面,将角度设置为0
STEP4 点击[应用程序]-[机构]进入机构仿真环境中,并添加凸轮连接
STEP5 添加伺服电机。
点击右侧[伺服电机],选择主动转盘的轴作为运动轴
STEP6 创建机构分析,进行运动学分析,时间自定,点击下面的运行即可进行分析
完成效果。
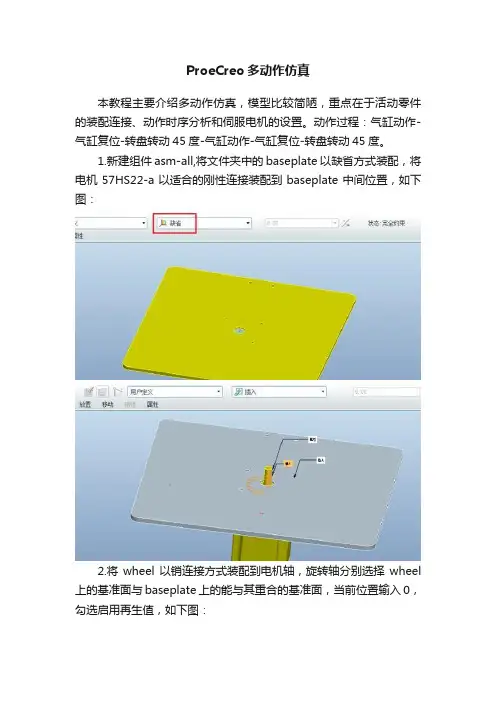
ProeCreo多动作仿真本教程主要介绍多动作仿真,模型比较简陋,重点在于活动零件的装配连接、动作时序分析和伺服电机的设置。
动作过程:气缸动作-气缸复位-转盘转动45度-气缸动作-气缸复位-转盘转动45度。
1.新建组件asm-all,将文件夹中的baseplate以缺省方式装配,将电机57HS22-a以适合的刚性连接装配到baseplate中间位置,如下图:2.将wheel以销连接方式装配到电机轴,旋转轴分别选择wheel 上的基准面与baseplate上的能与其重合的基准面,当前位置输入0,勾选启用再生值,如下图:3.用合适的刚性连接把plate-1装配到baseplate侧边的两个孔,如下图:4.用合适刚性连接把气缸FDA20-50装配到plate-1顶部的孔,如下图:零件已全部装配完成。
5.下面是重点,进行动作时序分析。
为了分析动作时序更明确,用EXCEL创建一个表格,如下图:如上图,这就是动作分析的全过程;第一、二行是转盘与气缸的动作位置与行程的变化,第三行为时间轴。
如要调节速度,可以适当更改每个时间间隔。
6.根据上面的EXCEL表格,创建两个TXT文件(这里是有规律的,请细心对比表格与两个TXT文件),并保存到目前工作目录,如下图:6.切换到机构模块。
7.点击伺服电机,弹出对话框,选择转盘销连接运动轴作为运动轴,如下图:点击对话框中的轮廓,模选择表,如下图:点击文件下面的图标,弹出对话框,类型选择所有文件,找到上面创建的TXT文件中的转盘,点击确定,点击伺服电机定义对话框中的确定,如下图:8.用同样的方法,定义气缸的伺服电机。
9.把模型移动到适合观察的角度,点击机构分析,把对话框移到一边,在结束时间输入63,如下图:点击运行,完成。
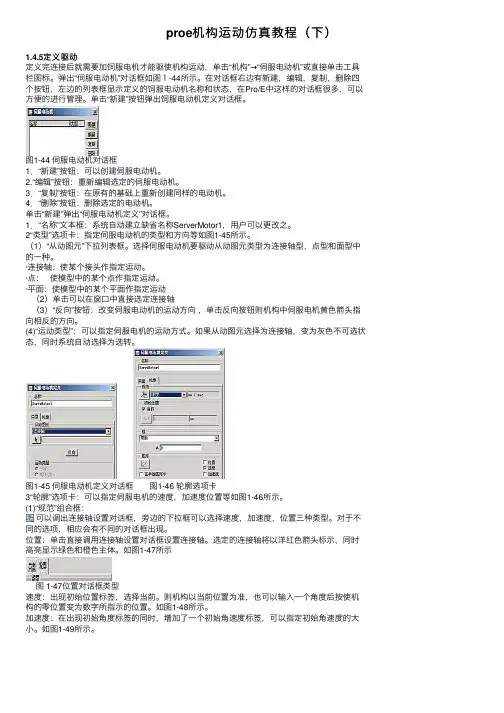
proe机构运动仿真教程(下)1.4.5定义驱动定义完连接后就需要加饲服电机才能驱使机构运动,单击“机构”→“伺服电动机”或直接单击⼯具栏图标。
弹出“伺服电动机”对话框如图1-44所⽰。
在对话框右边有新建,编辑,复制,删除四个按钮,左边的列表框显⽰定义的饲服电动机名称和状态,在Pro/E中这样的对话框很多,可以⽅便的进⾏管理。
单击“新建”按钮弹出饲服电动机定义对话框。
图1-44 伺服电动机对话框1.“新建”按钮:可以创建伺服电动机。
2.“编辑”按钮:重新编辑选定的伺服电动机。
3.“复制”按钮:在原有的基础上重新创建同样的电动机。
4.“删除”按钮:删除选定的电动机。
单击“新建”弹出“伺服电动机定义”对话框。
1.“名称”⽂本框:系统⾃动建⽴缺省名称ServerMotor1,⽤户可以更改之。
2“类型”选项卡:指定伺服电动机的类型和⽅向等如图1-45所⽰。
(1)“从动图元”下拉列表框。
选择伺服电动机要驱动从动图元类型为连接轴型,点型和⾯型中的⼀种。
·连接轴:使某个接头作指定运动。
·点:使模型中的某个点作指定运动。
·平⾯:使模型中的某个平⾯作指定运动(2)单击可以在窗⼝中直接选定连接轴(3)“反向”按钮:改变伺服电动机的运动⽅向,单击反向按钮则机构中伺服电机黄⾊箭头指向相反的⽅向。
(4)“运动类型”:可以指定伺服电机的运动⽅式。
如果从动图元选择为连接轴,变为灰⾊不可选状态,同时系统⾃动选择为选转。
图1-45 伺服电动机定义对话框图1-46 轮廓选项卡3“轮廓”选项卡:可以指定伺服电机的速度,加速度位置等如图1-46所⽰。
(1)“规范”组合框:可以调出连接轴设置对话框,旁边的下拉框可以选择速度,加速度,位置三种类型。
对于不同的选项,相应会有不同的对话框出现。
位置:单击直接调⽤连接轴设置对话框设置连接轴。
选定的连接轴将以洋红⾊箭头标⽰,同时⾼亮显⽰绿⾊和橙⾊主体。
如图1-47所⽰图 1-47位置对话框类型速度:出现初始位置标签,选择当前。
实验报告课程名称产品建模与仿真实验项目实体模型运动仿真实验仪器计算机、Pro/Engineer学院机电工程学院专业机械设计制造及其自动化班级/学号学生姓名实验日期成绩指导教师一、实验目的(1)了解当前流行的计算机辅助设计软件及其特点;(2)通过上机实验,掌握实体模型运动仿真方法;(3)根据所学的专业知识,学会应用计算机辅助设计软件(如Pro/E)进行实体模型的运动仿真。
二、实验内容(1)根据给定零件的三维模型零件进行运动仿真。
三、操作步骤1,选择“文件”/“新建”菜单命令,选择新建类型为“组件”,取消“使用缺省模板”,文件名为0903--104,确定,在“新文件选项”对话框中选择模板为“mmns_asn_disign”确定。
2,选择“添加元件”工具,在对话框中选择ground.prt,打开,选择约束类型为自动,确定。
3,选择“添加元件”工具,在对话框中选择qubing.prt,打开,连接类型选择“销钉”,择约束类型为对齐,依次选择QUBING的A_3轴与GROUND的A_2轴,第二约束类型为平移,依次选择QUBING与GROUND的两曲面,第三约束类型为旋转轴。
4,选择“添加元件”工具,在对话框中选择liangan.prt,打开,连接类型选择“销钉”,择约束类型为对齐,依次选择LIANGAN的A_2轴与GROUND的A_1轴,第二约束类型为平移,依次选择LIANGAN与GROUND的两曲面,第三约束类型为旋转轴。
5,选择“添加元件”工具,在对话框中选择huakuai.prt,打开,连接类型选择“销钉”,择约束类型为对齐,依次选择HUAKUAI的A_1轴与QUBING的A_6轴,第二约束类型为平移,依次选择HUAKUAI与QUBING的两曲面,第三约束类型为旋转轴。
新建约束集,连接类型选择“滑动杆”,约束类型为对齐,依次选择HUAKUAI的边与LIANGAN的边,第二约束类型为旋转,依次选择HUAKUAI与LIANGAN的两曲面,第三约束类型为平移轴。

皮带轮模拟运动仿真教程~~(继续图文)仿真的效果
第一步先画皮带轮和皮带
要在皮带的中间草绘条中心线
第二步画个小圆柱,它的长度比皮带的宽度长一点,直径与皮带厚度相同,用轴线和一个断面为参照做一个基准点
第三步开始装配,先皮带,用缺省或固定都可以
第四步做两个基准轴,等下放皮带轮用
第五步放皮带轮,用销钉连接,这两个简单就不仔细说明了
然后插入小圆柱,用槽连接
两个对象分别为圆柱上的参照点和带轮上草绘的曲线
选曲线的时候记得按ctrl把整条曲线都选上
第六步新设置一个平面连接,防止小圆柱乱动
两个面可以是圆柱上的端面和皮带轮上的侧面
出现连接失败的时候把偏移里的重合改成偏距
这个小圆柱就定义好了,刚才说让圆柱的长度大于皮带的宽度就是为了看清楚点,防止被埋在里面
然后运动仿真
第七步选应用程序里的机构然后选插入里的初始条件
第八步定义一个切向槽速度
选圆柱的那个槽连接,给它一个模,就是速度,这个是线速度
第九步定义一个运动轴速度选皮带轮的销钉连接
两个皮带轮都要定义
这些速度都要算一下,与上面的切向槽速度要匹配第十步就可以分析了
选动态和初始条件
运行就可以了。
曲柄滑块在PRO/E中的仿真一、建立曲柄滑块机构所需构件各构件参数曲柄长度30mm,连杆长度100mm,e为5mm1.机架启动Pro/E,新建文件:选“零件”/“实体”,文件名jijia-1。
使用多次拉伸的方法建立曲柄滑块机构的第一个构件——机架。
见图1。
图1确定打钩,对称拉伸,拉伸距离为5。
再如图2所示面拉伸圆柱,图2圆直径为5,拉伸距离为140。
然后照图3所示拉出两圆柱凸台,大圆柱凸台与方形三边相切,即保证偏心距e=5,小圆柱凸台直径3,长度3。
画完见图4。
图3图42、曲柄画曲柄,新建零件,名称为qubing-1,如图5拉伸草绘图5拉伸距离为3,画完如图6图63连杆画连杆,新建零件,名称liangan-1.如图7拉伸草绘,只在一边画圆拉伸孔。
图7再在另一边拉伸凸台,如图8所示,凸台与R2.5同心,高度3。
图84滑块最后画滑块,文件名huakuai-1,如图9拉伸。
图9对称拉伸,拉伸长度为10。
然后在图10所示平面拉伸一圆柱,直径3,长度10。
图10二、装配1.新建名称为zhuangpei的组件,如图11所示。
图112、插入机架位置缺省,然后插入曲柄,约束类型选销钉如图12所示图12装配完如图13图133、插入连杆同样选销钉,如图14把凸台插入曲柄孔中图144、插入滑块首先选销钉,把滑块凸台插入连杆孔中,销钉的平移不能选重合,选偏距,距离计算好后再输入,要使滑块孔轴线与机架圆柱轴线在同一基准平面内,如图15图15然后选放置里面的新设置,如图16图16注意这里集类型选圆柱,如图17图17然后选择滑块孔和机架轴。
装配完毕如图18所示图18三、运动仿真1、选择应用程序下面的机构,如图19图19进入机构运动仿真环境,窗口左侧出现运动仿真特征树,右侧显示运动分析工具栏。
2、设置主动件。
单击工具按钮“伺服电机”,在弹出的窗口中,选择曲柄与机架的铰接轴作为运动轴,即指定曲柄为主动件,来产生回转运动。
如图20,21图20图21然后点轮廓,把位置改为速度,A处输入10,意思为10度/秒,确定。
Proe运动仿真将缸体切除一半,便于仿真观察,将right基准面阵列5份,便于后续装配。
已复制外部几何为参照,创建活塞。
以复制外部几何为参照,创建偏心轮。
以复制外部几何为参照,创建连杆 1.将缸体,活塞,连杆1,以缺省方式装配,再激活连杆1,创建剩余部分。
再以偏心轮为参照,创建连杆1的下端部分。
将连杆1的边界和2个孔位用草绘线画出来。
然后打开连杆1,将草绘线阵列5份。
在组件里面创建新元件,创建连杆 2. 再重新新建一个组件,首先缺省装配缸体。
再用【销钉】装配偏心轮。
用【滑动杆】装配活塞。
用2个【销钉】装配连杆1.装配好这些之后,进入【机构】模块。
点击【伺服电动机】工具。
选择偏心轮和缸体之间的销钉轴为运动轴。
设置电动机的速度。
点击【机构分析】工具。
设置【终止时间】。
运动分析之前,先抓取一个快照。
运行分析定义。
可以看到机构动了,这里我的机构是经过修改的,所以运动没有问题。
如果机构运动不了或出现干涉,说明零部件尺寸不合理,只需修改骨架模型即可。
调整好之后,进入【标准】模块。
用【重复】命令,装配剩下的活塞。
用2个【销钉】装配连杆2,然后用【重复】命令装配剩下的3根。
所以零件装配完毕,进入机构模块仿真。
仿真结果。
CV将缸体切除一半,便于仿真观察,将right基准面阵列5份,便于后续装配。
已复制外部几何为参照,创建活塞。
以复制外部几何为参照,创建偏心轮。
以复制外部几何为参照,创建连杆 1.将缸体,活塞,连杆1,以缺省方式装配,再激活连杆1,创建剩余部分。
再以偏心轮为参照,创建连杆1的下端部分。
将连杆1的边界和2个孔位用草绘线画出来。
然后打开连杆1,将草绘线阵列5份。
在组件里面创建新元件,创建连杆 2. 再重新新建一个组件,首先缺省装配缸体。
再用【销钉】装配偏心轮。
用【滑动杆】装配活塞。
用2个【销钉】装配连杆1.装配好这些之后,进入【机构】模块。
点击【伺服电动机】工具。
选择偏心轮和缸体之间的销钉轴为运动轴。
设置电动机的速度。
如何用Pro-e仿真模拟既自转又绕中心公转的滚轮运动最终效果如图1~3所示,滚轮既绕自身轴线自转,同时又通过旋转臂绕机座中心公转。
图1图2图3下面分步骤对整个过程进行详细介绍:1)对机座(文件名为3.prt)进行三维建模:各部分尺寸如图4所示。
图4在距离底面20mm处新建一个平面DTM1,如图5所示。
图5在DTM1上草绘一个半径R92.5mm的圆,如图6所示。
图62)对旋转臂(文件名为1.prt)进行三维建模,如图7所示:图73)对滚轮(文件名为2.prt)进行三维建模,如图8所示,其中Ф5直径的孔用于仿真模拟时观察滚轮的运动:图8在滚轮旋转正中心新建一个基准点PNT1,PNT1点在FRONT/TOP/RIGHT三个平面的相交处,如图9所示。
图94)新建一个装配文件,首先在装配图中新建基准轴AA_1(通过平面ASM_RIGHT和ASM_TOP),如图10所示:图105)装配机座(3.prt):机座上表面和ASM_FRONT对齐;机座中心轴和AA_1对齐;机座FRONT面和ASM_TOP对齐,如图11所示。
图116)装配旋转臂(1.prt):使用“销钉”约束,轴对齐,面对齐(偏移32.5mm),如图12所示。
图127) 装配滚轮(2.prt ):先使用“销钉”约束,轴对齐,面对齐,如图13所示。
图13 再使用“槽”约束,“直线上的点”,选择滚轮上的点PNT1和机座上草绘的圆(分别选中两段半圆),如图14所示。
图148)点击“应用程序”—“机构”,进入机构界面,如图15所示。
图159)点击“伺服电动机”,新建伺服电动机ServoMotor1,选择滚轮自转的运动轴,点击“轮廓”,选择“速度”,并设置速度为360deg/sec。
如图16所示。
图1610)点击“伺服电动机”,新建伺服电动机ServoMotor2,选择滚轮公转的方向,点击“轮廓”,选择“速度”,并设置速度为94.248mm/sec。
如图17所示。
辽宁工程技术大学课程设计题目:基于Pro/E风扇设计与运动仿真班级:机械07-6班姓名:徐宝元指导教师:曹艳丽完成日期:2011年1月13日摘要电风扇是一种常见的家用电器,本次设计以台式电风扇为例,来详细讲述Pro/E设计电风扇的全过程。
其外型结构较为复杂,如果用传统的CAD绘图软件设计非常困难,Pro/E 可以轻松解决这个问题,Pro/E软件具有很强大的实体造型、曲面造型、虚拟产品装配仿真、工程图生成等功能。
本文主要讲述电风扇外形实体建模、电风扇的组件装配、电风扇的叶片的转动仿真。
设计综合运用了拉伸、扫描、混合等实体建模的基本方法;曲面修剪、合并、偏移、实体化等复杂的建模方法;装配的的设计方法用到了无连接口的约束和有连接口的约束。
在电风扇的建模设计总体上是采用了自底向上的设计方法,在组件在设计过程中也采用了自顶向下的设计方法。
我们在学习电风扇的建模设计过程中,除了学习建模方法外,更重要的是学习这种模型设计思想。
关键词:电风扇、Pro/E、实体建模、装配、运动仿真AbstractElectric fan is a common household appliances, this design to desktop electric fan, for example, to expound Pro/E design fan process. Its exterior structure is relatively complex, if use the traditional CAD drawing software design is very difficult, Pro/E can be easy to solve this problem, Pro/E software has very powerful entities modelling, surface modeling, virtual assembling simulation, engineering drawing generation, and other functions. This article mainly described entity modeling, electric fan shape of component assembly, electric fan blade rotation simulation. Design comprehensive use the tensile, scanning, mixing entity modeling the basic method, Surface trim, merger, offset, substantiate complex modeling method, Assembly design method used with a mouth of nonartesian-artesian constraints and connection mouth constraints. The fan modeling design was generally adopted a bottom upward design methods, in the component in the design process also USES a top-down design method. We are studying the fanner modeling design process, besides study modeling method outside, more important is to learn this model design thought.Keywords:electric fan, Pro/E, entity modeling, assembling, movement simulation一、设计任务电风扇是一种常见的家用电器,也是我国最早生产和使用的的家用电器之一。
Proe运动仿真
将缸体切除一半,便于仿真观察,将right基准面阵列5份,便于后续装配。
已复制外部几何为参照,创建活塞。
以复制外部几何为参照,创建偏心轮。
以复制外部几何为参照,创建连杆 1 .
将缸体,活塞,连杆1,以缺省方式装配,再激活连杆1,创建剩余部分。
再以偏心轮为参照,创建连杆1 的下端部分。
将连杆1 的边界和2个孔位用草绘线画出来。
然后打开连杆1,将草绘线阵列5份。
在组件里面创建新元件,创建连杆2.
再重新新建一个组件,首先缺省装配缸体。
再用【销钉】装配偏心轮。
用【滑动杆】装配活塞。
用2个【销钉】装配连杆1.
装配好这些之后,进入【机构】模块。
点击【伺服电动机】工具。
选择偏心轮和缸体之间的销钉轴为运动轴。
设置电动机的速度。
点击【机构分析】工具。
设置【终止时间】。
运动分析之前,先抓取一个快照。
运行分析定义。
可以看到机构动了,这里我的机构是经过修改的,所以运动没有问题。
如果机构运动不了或出现干涉,说明零部件尺寸不合理,只需修改骨架模型即可。
调整好之后,进入【标准】模块。
用【重复】命令,装配剩下的活塞。
用2个【销钉】装配连杆2,然后用【重复】命令装配剩下的3根。
所以零件装配完毕,进入机构模块仿真。
仿真结果。
cv
将缸体切除一半,便于仿真观察,将right基准面阵列5份,便于后续装配。
已复制外部几何为参照,创建活塞。
以复制外部几何为参照,创建偏心轮。
以复制外部几何为参照,创建连杆 1 .
将缸体,活塞,连杆1,以缺省方式装配,再激活连杆1,创建剩余部分。
再以偏心轮为参照,创建连杆1 的下端部分。
将连杆1 的边界和2个孔位用草绘线画出来。
然后打开连杆1,将草绘线阵列5份。
在组件里面创建新元件,创建连杆2.
再重新新建一个组件,首先缺省装配缸体。
再用【销钉】装配偏心轮。
用【滑动杆】装配活塞。
用2个【销钉】装配连杆1.
装配好这些之后,进入【机构】模块。
点击【伺服电动机】工具。
选择偏心轮和缸体之间的销钉轴为运动轴。
设置电动机的速度。
点击【机构分析】工具。
设置【终止时间】。
运动分析之前,先抓取一个快照。
运行分析定义。
可以看到机构动了,这里我的机构是经过修改的,所以运动没有问题。