切片机的惯性力平衡仿真及优化_杨德勇
- 格式:pdf
- 大小:365.95 KB
- 文档页数:4

机械零部件多物理场耦合分析及优化设计研究随着科技的不断进步和应用领域的扩展,机械零部件的设计和优化变得越来越重要。
在实际工程中,机械零部件常常同时受到多个物理场的影响,例如机械应力、热量传递、电磁场等。
因此,进行机械零部件多物理场耦合分析和优化设计成为了一项关键的研究课题。
在机械零部件的设计过程中,传统的设计方法主要基于单一物理场的分析,如机械应力分析或热传导分析。
然而,这种单一物理场的分析无法准确反映实际工况下各种物理场之间的相互作用。
因此,为了更好地了解机械零部件在多物理场作用下的行为,需要进行多物理场耦合分析。
多物理场耦合分析的核心思想是将不同的物理场耦合在一起,建立相应的数学模型,并通过数值计算方法求解。
例如,对于机械应力和热传导的耦合分析,可以采用有限元方法进行数值求解。
在建立数学模型时,需要考虑各个物理场之间的相互影响和耦合机制,选择适当的数学方程描述它们的关系。
随着计算机技术的快速发展,多物理场耦合分析的计算效率也得到了提高,使得该方法在工程实践中得到了广泛的应用。
多物理场耦合分析不仅可以帮助工程师更好地理解机械零部件的行为,还可以指导优化设计。
通过对不同设计参数的改变,可以评估其对多个物理场的影响,并确定最佳设计方案。
例如,在设计高速列车的机械结构时,需要考虑机械应力、热传导和电磁场的耦合效应。
通过耦合分析和优化设计,可以设计出更符合工程要求的结构,提高列车的运行效率和安全性。
除了进行多物理场耦合分析和优化设计,还有一些其他的研究方向值得关注。
例如,多物理场仿真模型的建立和验证是一个关键问题。
在建立数学模型时,需要考虑各个物理场参数的准确性和可靠性。
通过与实验数据的比较和验证,可以评估模型的精确性,并对模型进行修正和改进。
此外,多物理场耦合分析还需要考虑不确定性和敏感性分析。
在实际工程中,物理场参数常常存在一定的不确定性,因此需要对不确定性进行评估,并考虑其对设计方案的影响。
综上所述,机械零部件多物理场耦合分析及优化设计是一项重要的研究课题。

基于多软件平台的二维重载精密转台的控制特性仿真分析及优
化
杨东明;胡晓兵;郭亮;官涛
【期刊名称】《四川大学学报(自然科学版)》
【年(卷),期】2024(61)1
【摘要】为提高二维重载精密转台动态特性,基于AMEsim、ADAMS以及Simulink多软件机电一体化联合仿真对系统控制特性进行仿真分析.本文使用AMESim建立电机模型,Adams建立二维重载系统的动力学模型,使用Simulink工具箱建立PID控制模型,最终建立三软件联合仿真模型对系统阶跃响应进行仿真分析;针对系统存在时变性、非线性和负载干扰等因素的问题,采用自适应模糊PID控制算法对系统进行控制优化.仿真结果表明,模糊PID控制算法有着响应快、无超调,稳定误差较普通PID控制减小37%左右等优点.
【总页数】9页(P214-222)
【作者】杨东明;胡晓兵;郭亮;官涛
【作者单位】四川大学机械工程学院;宜宾四川大学产业技术研究院;中国电子科技集团公司第二十九研究所
【正文语种】中文
【中图分类】TP3
【相关文献】
1.精密光电测试转台热特性仿真分析
2.基于非线性特性的大型转台精密运动控制技术
3.基于MATLAB的三维重载荷转台的运动学分析与仿真
4.大扭矩直驱式超精密液体静压转台热态特性控制与优化
5.基于PSO-BP算法优化的转台PID控制系统仿真研究
因版权原因,仅展示原文概要,查看原文内容请购买。


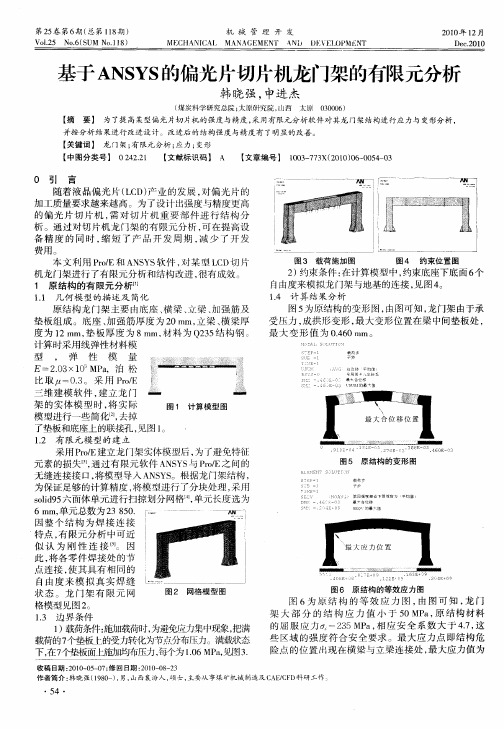
盾构刀盘振动切削性能有限元仿真研究童一珏;蒋建东;张钧;赵颖娣【摘要】针对盾构机刀盘的掘进效率问题,对振动切削原理、刀具运动轨迹与破岩机理、盾构刀盘建模、切削力学模型等方面进行了研究,将振动切削技术运用到盾构刀盘的开挖过程中,对刀盘振动切削过程中各项性能参数进行了分析与对比,提出了在刀盘圆周添加正弦激励改变转速实现振动切削的方法,利用LS-DYNA仿真软件分别进行了单把刀具的振动切削及盾构刀盘振动切削过程的数值模拟仿真.研究结果表明,切刀振动切削减阻效果优于滚刀,刀盘在振动切削条件下受力减小,产生的内能增加.【期刊名称】《机电工程》【年(卷),期】2016(033)006【总页数】6页(P668-673)【关键词】盾构刀盘;破岩机理;振动切削;数值模拟【作者】童一珏;蒋建东;张钧;赵颖娣【作者单位】浙江工业大学特种装备制造与先进加工技术教育部重点实验室,浙江杭州310014;浙江工业大学特种装备制造与先进加工技术教育部重点实验室,浙江杭州310014;浙江工业大学特种装备制造与先进加工技术教育部重点实验室,浙江杭州310014;浙江工业大学特种装备制造与先进加工技术教育部重点实验室,浙江杭州310014【正文语种】中文【中图分类】U455.3+1;TH113.1盾构机是一个具备多种功能于一体的大型地下隧道开挖衬砌成套设备,盾构刀盘作为其中的核心部件,具有开挖土体、稳定掌子面、搅拌渣土等重要作用[1]。
刀盘上各种类型刀具与岩土之间的相对运动参数及类型决定了岩土破坏失效、刀具磨损、岩土切削性能及盾构效率与能耗。
国内外针对岩土切削的土壤失效与切削功率的相关研究有振动挖掘作业技术研究[2],压实土壤高速切削振动减阻及其数值仿真研究等[3],上述研究表明,土壤在振动载荷的用下强度会显著下降。
伴随计算技术的发展,数值算法、理论的成熟,进一步扩大了数值模拟技术在科学研究、工程决策等领域的应用。
上海交通大学汤华和丁俊宏、天津大学王曰启和李娟[4]利用LS-DYNA建立了盾构刀盘刀具切削土壤的有限元模型,成功对盾构掘进的扭矩计算进行了模拟,数值模拟结果与实验结果相近。
基于SolidWorkS的糕点切片机建模与仿真
刘源;吴海涛;刘泓滨
【期刊名称】《机电一体化》
【年(卷),期】2011()4
【摘要】建立了糕点切片机的数学模型,利用SolidWorks软件根据糕点切片机的设计要求进行了建模,使用配有棘轮罩的棘轮机构来实现间歇送料机构的间歇长度可调,从而达到了切片厚度可调的目的。
经过SolidWorks的COSMOSMotion插件进行高效直观的计算仿真,验证了设计方案的正确性。
【总页数】5页(P89-93)
【关键词】棘轮机构;SolidWorks;厚度;COSMOSMotion;建模;仿真
【作者】刘源;吴海涛;刘泓滨
【作者单位】昆明理工大学机电工程学院
【正文语种】中文
【中图分类】TH122
【相关文献】
1.基于SolidWorks平台的切片机三维建模设计 [J], 王建军;吴海涛;刘泓滨
2.基于SolidWorks平台的糕点切片机设计 [J], 刘源;吴海涛;刘泓滨;付骏宇
3.基于ADAMS的糕点切片机切刀和送料机构的运动仿真 [J], 李守成;吴海涛;刘泓滨
4.基于Solidworks的试卷袋密封签裁切输送机构建模和仿真分析 [J], 马涛;王玉
娟;王超;李秋丽;郭力铭;单光
5.采摘机器人动力学建模及动作规划仿真研究——基于SolidWorks [J], 薛涛;韩春红
因版权原因,仅展示原文概要,查看原文内容请购买。
切片机的惯性力平衡仿真及优化杨德勇;胡建平;韦恩铸;雷恒群;孔祥次【摘要】莲藕切片机切削机构的工作性能直接影响莲藕切片机的切片质量.针对自行设计的莲藕切片机振动较大的问题,运用机构的平衡理论分析了切削机构工作时产生的不平衡惯性力,提出通过添加平衡质量块来平衡机构的惯性力.在此基础上应用虚拟样机技术,用Pro/E建立莲藕切片机切削机构数字样机,在ADAMS中对平衡质量块的质量和质心位置进行了优化设计.仿真结果表明,优化后机构的振动力减少了将近50%,为进一步改进原有样机的结构提供了依据.【期刊名称】《农机化研究》【年(卷),期】2010(032)005【总页数】4页(P22-25)【关键词】莲藕;切片机;惯性力平衡;优化【作者】杨德勇;胡建平;韦恩铸;雷恒群;孔祥次【作者单位】江苏大学机械工程学院,江苏,镇江,212013;江苏大学江苏省现代农业装备与技术教育部重点实验室,江苏,镇江,212013;江苏大学江苏省现代农业装备与技术教育部重点实验室,江苏,镇江,212013;江苏大学江苏省现代农业装备与技术教育部重点实验室,江苏,镇江,212013;江苏金湖县农机化技术推广站,江苏,湖,211600;江苏金湖县农机化技术推广站,江苏,湖,211600【正文语种】中文【中图分类】S226.80 引言近年来,为了满足我国藕制半成品国内消费和对外出口的需求,降低劳动强度,开展了莲藕切片机的研究和开发。
本课题组在吸收人工切片工作原理基础上,设计研制了一种新型的莲藕切片机[1]。
这台新型切片机较好地解决了切削藕片易破碎、粘刀、藕片难清理等问题,但也还存在着一定的不足,如切片机台面的振动幅度较大等问题。
由于台面的振动会引起装载导筒中莲藕的跳动,进而影响藕片的加工质量,故要减小切片机在工作时台面的振动。
虚拟样机技术[2-3]可精确地仿真机构的运动,分析机构的参数对机构动态特性的影响,从而优化机构参数。
本文采用加平衡质量法对自行设计的莲藕切片机切削机构进行了平衡设计,通过在ADAMS中建立虚拟样机,对切片机切削机构进行仿真优化,优化平衡后机构振动力峰值大幅减小,波动更加平缓,为后续的改进提供依据。
切片机的惯性力平衡仿真及优化杨德勇1a,1b,胡建平1b,韦恩铸1b,雷恒群2,孔祥次2(1.江苏大学a.机械工程学院; b.江苏省现代农业装备与技术教育部重点实验室,江苏镇江212013;2.江苏金湖县农机化技术推广站,江苏金湖211600)摘要:莲藕切片机切削机构的工作性能直接影响莲藕切片机的切片质量。
针对自行设计的莲藕切片机振动较大的问题,运用机构的平衡理论分析了切削机构工作时产生的不平衡惯性力,提出通过添加平衡质量块来平衡机构的惯性力。
在此基础上应用虚拟样机技术,用P ro/E建立莲藕切片机切削机构数字样机,在ADA M S中对平衡质量块的质量和质心位置进行了优化设计。
仿真结果表明,优化后机构的振动力减少了将近50%,为进一步改进原有样机的结构提供了依据。
关键词:莲藕;切片机;惯性力平衡;优化中图分类号:S226.8文献标识码:A文章编号:1003-188X(2010)05-0022-040引言近年来,为了满足我国藕制半成品国内消费和对外出口的需求,降低劳动强度,开展了莲藕切片机的研究和开发。
本课题组在吸收人工切片工作原理基础上,设计研制了一种新型的莲藕切片机[1]。
这台新型切片机较好地解决了切削藕片易破碎、粘刀、藕片难清理等问题,但也还存在着一定的不足,如切片机台面的振动幅度较大等问题。
由于台面的振动会引起装载导筒中莲藕的跳动,进而影响藕片的加工质量,故要减小切片机在工作时台面的振动。
虚拟样机技术[2-3]可精确地仿真机构的运动,分析机构的参数对机构动态特性的影响,从而优化机构参数。
本文采用加平衡质量法对自行设计的莲藕切片机切削机构进行了平衡设计,通过在AD A MS中建立虚拟样机,对切片机切削机构进行仿真优化,优化平衡后机构振动力峰值大幅减小,波动更加平缓,为后续的改进提供依据。
同时,采用仿真优化的方法,避免繁琐的理论计算过程,提高了效率。
1切削机构的工作原理莲藕切片机的切削机构是莲藕切片机的核心机构,其工作性能的优劣直接影响莲藕切片机的切片质量。
本课题组研制的莲藕切片机切削机构的虚拟样收稿日期:2009-07-14基金项目:江苏省农机三项工程项目(N J2007-17)作者简介:杨德勇(1976-),男,江苏江宁人,讲师,(E-m ail)yangdy @163.co m。
通讯作者:胡建平(1965-),男,江苏吴县人,教授,(E-m ail)hu j p@ u j 。
机如图1所示;其机构示意图如图2所示。
莲藕切片机切削机构在原理上采用了曲柄滑块式切削机构,莲藕放入物料导筒内,一次可以叠放几段莲藕,依靠上部莲藕的自重和压块压住下部的莲藕,使其下表面抵在物料挡板上;电动机带动曲柄滑块机构运动,水平安装在滑块上的切片刀对莲藕进行切削。
图1莲藕切片机切削机构F i g.1V i rt ua l protot yp e of cu tti ng m echan ism1.物料导筒2.莲藕3.工作台架4.切片刀5.曲柄滑块机构图2切削机构示意图Fig.2Sche m ati c of cutti ng m ech an i s m2切削机构的动平衡分析根据图2所示的莲藕切片机切削机构示意图,莲藕切片机切削机构是一个曲柄滑块机构。
由于曲柄采用均质圆盘结构,圆盘的质心在固定支座上,因此在圆盘曲柄做匀速转动时不产生惯性力,而其余构件像连杆、滑块、刀片运动时都将产生惯性力。
这些惯性力最终由基座承受,使切片机产生振动,降低了藕片切削的平整度。
通过减小切片机的惯性力可以减小机器工作时的振动。
在机械运动机构中一般是通过平衡设计的方法来减小机构惯性力。
下面根据机械平衡的基本理论来分析莲藕切片机的动平衡问题。
在机构惯性力的平衡中,常用的方法有:加平衡质量法、近似对称布置法和加平衡机构法[4],在此应用加平衡质量法来进行分析。
由于主要对切削机构进行惯性力分析,不考虑构件的惯性力矩,故采用质量的静代换法可满足要求。
在如图3所示的切削机构简化图中,曲柄A B采用均质圆盘结构,其质量在支座A点上,滑块的质量m3在铰链点C处。
用质量的静代换法将连杆BC的质量m2转化到B,C两个铰链点处,分别用m#B1,m C1表示连杆BC的替代质量,则m B1=bLm2m C1=aLm2这样经过代换后曲柄滑块机构B,C两个铰链点处的集中质量m B,m C,即m B=m B1m C=m C1+m 3图3切削机构的简图F i g.3D i agra m of c u tti ng m echan is m通过质量代换,将曲柄滑块机构的运动构件的质量集中到B,C两个点,即集中质量m B,m C。
要分析运动构件产生的惯性力,必须分析出B和C两点的加速度。
由图3可知,运用余弦定理,求出滑块的位移S为S=r cos A+L2-(r sin A)2式中r)曲柄的半径;L)连杆的长度;A)曲柄的转角。
对上式二次求导,得出滑块的加速度a C为a C=-r X2cos A-r2X2cos2A(L2-r2sin A2)+r4(X sin A cos A)2(L2-r2si n A)32式中X)曲柄的角速度。
对滑块的加速度a C进行化简并舍去高次项,得出a C=-r X2cos A-X2r2Lcos2A由于曲柄为匀速转动,故铰链B点处只有法向加速度,即a B=-r X2因此,在铰链B点处的惯性力为F B=-m B r X2在铰链C点处的惯性力为F C=-m C CX2cos A-m C X2r2Lcos2A上式中,右边第1项为一阶惯性力,第2项为二阶惯性力。
由于二阶惯性力较小,只考虑一阶惯性力,即F C=-m C r X2cos A对于铰链B点处的惯性力,只需在曲柄的延长线上D点加一平衡质量块即可实现完全平衡,如图4所示。
所加平衡质量块满足m D1e-m B r=0图4切削机构的平衡F i g.4Balance of cu tting m echan is m为平衡铰链C点处的惯性力,可在曲柄的延长线上D点再加一平衡质量块。
由于曲柄匀速转动,铰链D点处只有法向加速度,没有切向加速度,故质量块m D2产生的惯性力为F D2=-m D2e X2将惯性力F D2在x和y方向分解,其分力为F D2x=-m D2e X2cos AF D2y=-m D2e X2s i n A由于惯性力F D2的水平分力F D2x与铰链C点处的惯性力F C方向相反,故用水平分力F D2x来平衡惯性力;但同时又多出一个新的不平衡惯性力F D2y,它对机构产生不利影响。
因此,在平衡质量块m D 2的选取上应该满足:尽量消除F C 的同时,保证F D 2y 不致过大。
基于上述分析可知,通过在曲柄的延长线上加平衡质量块可以有效地平衡机构的惯性力,使机构部分平衡。
但由于惯性力的计算过程繁琐复杂,不易确定平衡质量块的参数,难以获得最佳的平衡效果。
而利用虚拟样机技术,通过数字样机在AD A MS 中进行仿真优化可以方便地得到平衡块的质量和位置。
3 切削机构的仿真优化应用三维建模软件Pr o /E 建立莲藕切片机切削机构的实体模型,利用动力学仿真软件AD A MS 和Pro/E 的专用接口模块M echan is m /Pro ,将切削机构的三维模型导入到AD A MS [7]。
在AD A MS 中添加机构的约束副,建立新型莲藕切片机的虚拟样机,如图1所示。
基于前面切削机构的动平衡分析,采用虚拟样机技术来研究机构惯性力的平衡问题也使用加平衡质量法,在曲柄与连杆连接点的反方向上添加平衡质量块,添加平衡块后的虚拟样机如图5所示。
图5 添加平衡块的虚拟样机Fi g .5 V irtual protot ype by add i ng t h e bal an ce b l ock3.1 平衡块的质量优化为了确定满足平衡要求时所需平衡块的质量,在ADA MS 中将平衡块的质量作为设计变量,将由惯性力引起的机构振动力的平均值最小作为目标函数,考虑机器的结构定义约束条件为:设计变量在6~20kg 之间,然后在ADA MS 中进行仿真,优化运算结果如表1所示。
表1 平衡块质量的优化运算结果T ab .1 The opti m iz ati on resu l t ofm as s of t he balance block 次数平衡块质量/kg振动力/N 16.00040.859210.00037.862312.00036.765续表1次数平衡块质量/kg振动力/N 415.00035.617516.00035.370618.00035.090719.00035.062820.00035.113由表1可知:机构振动力的大小是随着平衡块的质量的增加而逐渐减小的。
当平衡块的质量为19kg 时,机构振动力的平均值达到了最小,为35.062N 。
当平衡块的质量继续增加时,机构振动力的逐渐增加。
根据前面的理论分析,出现这种现象的原因主要是:平衡块虽然可以消除机构在水平方向的惯性力,减小机构在水平方向的振动力;但是同时也带来了机构在垂直方向的惯性力,随着平衡块质量的增加,机构在垂直方向的振动力有所增加。
当机构在垂直方向的振动力的增加量大于水平方向的减小量时,机构总的振动力就增加。
这一点说明仿真的结果与理论分析是一致的,从而验证了模型的正确性。
3.2 平衡块的位置优化为了确定满足平衡要求时平衡块的偏心位置,以平衡块质心到曲柄旋转中心之间的距离即偏心距为设计变量,考虑本机器的结构,分别对偏心距为65,85,100,125mm 进行仿真,得出机构振动力曲线随偏心距变化情况,如图6所示。
图6 机构振动力与偏心距的变化曲线F i g .6 Th e curves of v i brati on f orce and eccen tri city由图6可知,机构振动力的大小是随着偏心距的增加而逐渐减小的。
综合前面的分析,对添加质量为15kg 、偏心距为70mm 的平衡块的虚拟样机和未加平衡块的虚拟样机分别进行动力学仿真,其振动力曲线如图7所示。
从图7的仿真结果中可以看出,未加平衡块时,振动力的峰值为90N ,而加了平衡块之后系统的振动力的峰值为50N ,振动力减小了近50%。
因此,通过上面对系统惯性力平衡的仿真优化,大大减小了机构的振动力,取得了良好的效果。
图7机构优化前后振动力曲线Fig.7The curves of vi b ration force b efore and after opti m izati on4结论本文对自主研制的莲藕切片机的切削机构进行了惯性力分析,通过添加平衡质量块可平衡机构工作时产生的惯性力。
应用Pro/E和AD A MS,建立莲藕切片机切削机构的虚拟样机。