机器人操作臂动力学
- 格式:ppt
- 大小:3.59 MB
- 文档页数:71
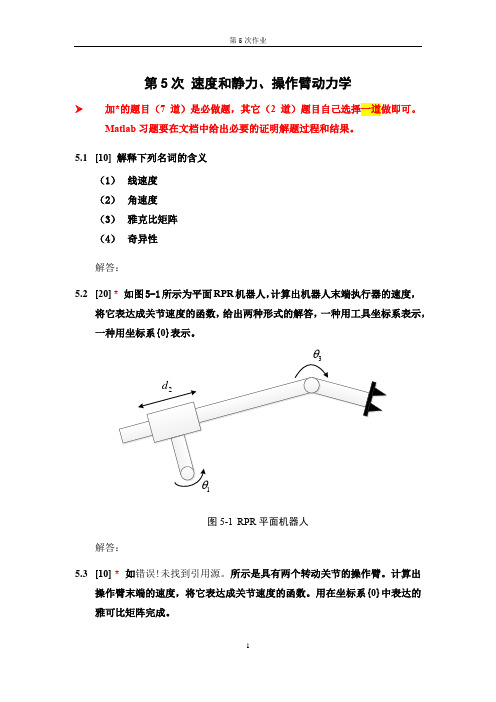
第5次速度和静力、操作臂动力学加*的题目(7道)是必做题,其它(2道)题目自己选择一道做即可。
Matlab习题要在文档中给出必要的证明解题过程和结果。
5.1[10]解释下列名词的含义(1)线速度(2)角速度(3)雅克比矩阵(4)奇异性解答:5.2[20]解答:5.3[10] *如错误!未找到引用源。
所示是具有两个转动关节的操作臂。
计算出操作臂末端的速度,将它表达成关节速度的函数。
用在坐标系{0}中表达的雅可比矩阵完成。
图5-2 两连杆操作臂解答:5.4 [15] 一般机构有时存在某些特定的位形,称作“各向同性点”,这时雅可比矩阵的各列正交且模相同。
对于错误!未找到引用源。
的两连杆操作臂,求出存在的各向同性点。
提示:对1l ,2l 有什么要求? 解答:5.5 [20] * 如图5-3所示为平面3R 机器人,建立合适的坐标系,分别写出工具坐标系和基坐标系中的雅可比矩阵,并分别根据两个雅可比矩阵计算什么情况下该机器人会出现奇异点,计算结果是否相同?图5-3三连杆平面操作臂解答:5.6[30]*任何具有3个旋转关节且连杆长度非零的机构在其工作空间内一定有一条奇异点轨迹(a locus of singular points)的说法是否正确?解答:5.7[25]*求出图5-4所示的3自由度操作臂雅可比矩阵。
在坐标系{4}中写出此矩阵,坐标系{4}位于手部末端且与坐标系{3}的方位相同。
图5-4 3R 非平面操作臂解答: 5.8 [20] * Given0.6120.50.61210.3540.8660.35430.70700.70770001-⎡⎤⎢⎥⎢⎥⎢⎥-⎢⎥⎣⎦ If the velocity vector at the origin of {A} is 5130.900.5⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥⎣⎦Find the 6*1 velocity vector with reference point at the origin of {B}. 解答:5.9 [MATLAB 习题] *这个练习的重点是平面3自由度3R 机器人(见图5-3;DH 参数由表5-1给出)的雅可比矩阵及行列式、分布速度控制仿真和静力学逆解。


六自由度机械臂动力学是研究六自由度机械臂运动规律的学科,主要包括六自由度机械臂的运动学和动力学两部分。
运动学主要研究六自由度机械臂的运动轨迹、速度、加速度等运动参数,不涉及力和受力的问题。
运动学方程通常采用正解运动学或者逆解运动学的方法进行求解。
动力学则需要考虑六自由度机械臂在运动过程中所受到的各种力,如重力、摩擦力、弹性力等,并研究这些力如何影响机械臂的运动状态,从而得出动力学方程。
动力学方程通常通过牛顿-欧拉方程或者拉格朗日方程进行求解。
六自由度机械臂的动力学问题是机器人学和控制理论中的重要问题之一。
对于复杂的实际应用,如工业自动化、医疗机器人、空间探索等,精确的六自由度机械臂动力学模型和控制算法对于实现高精度、高效率的机器人操作至关重要。
第6次 速度和静力、操作臂动力学加*的题目是必做题,其它题目自己选择50%做即可,鼓励大家首选自己拿不准的题目。
5.1 [20]* 不考虑重力,在图6-1所示的平面3R 机器人的末端执行器(即工具坐标系处)施加力Tt t xyz f f f f ⎡⎤=⎣⎦(相对于工具坐标系描述),为在图示位置维持平衡,则各个关节应施加的力矩各为多少?写出具体的求解过程。
图6-1 三连杆平面操作臂解答:DH 参数表如下:变换矩阵如下:111101000000100001c s s cT -⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦221221200000100001c s L s c T -⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦ 33233230000010001c s L s c T -⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦33410001000010001L T ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=∙11100θω⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=00011υ 211122212222221212ˆ()0000000001R Z c s s c ωωθθθθθ-=⋅+⋅⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=-+=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥+⎣⎦⎣⎦⎣⎦⎣⎦21111122112221121221211()()0000(000)01000v R v P c s L L s s c L c ωθθθ-=⋅+⨯⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=-+⨯=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦32123332333333123123ˆ()0000000001R Z c s s c ωωθθθθθθθ-=⋅+⋅⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=-+=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥+++⎣⎦⎣⎦⎣⎦⎣⎦3212223322333121233121123121312121231213121212()()000(00)0100[()][()]0v R v P c s L s L s c L c c L s s L c L s L s c L c L ωθθθθθθθθθθθθ-=⋅+⨯⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=-+⨯⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥+⎣⎦⎣⎦⎣⎦⎣⎦⎡⎤+++⎢⎥=-+++⎢⎥⎢⎥⎣⎦ 从上面的计算中可知,旋转矩阵为:11011122122233233334000010000100001100010001c s R s c c s R s c c s R s c R θθθθθθθθθθθθ-⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦-⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦-⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦利用书中公式1111111i i i i i i ii i i ii i i i if R f n R n P f +++++++==+⨯由Tt t x y z f f f f ⎡⎤=⎣⎦ 有33T xyz f f f f ⎡⎤=⎣⎦33333000x y z z y L f n f L f f L f ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=⨯=-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦ 33332233330001x x y y xy z z c s f c f s f f s c f s f c f f f θθθθθθθθ--⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥==+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦33233223333333333232330000010()x y z x y y z zz zy x y c s L c f s f n s c L f s f c f L f f s L f c L f L f L f L s f c f θθθθθθθθθθθθ⎡⎤--⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=-+⨯+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎡⎤⎢⎥=--⎢⎥⎢⎥++⎣⎦223311223323323323323300001()()()()x y xy z x y x y x y x y z c s c f s f f s c s f c f f c c f s f s s f c f s c f s f c s f c f f θθθθθθθθθθθθθθθθθθθθ--⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦--+⎡⎤⎢⎥=-++⎢⎥⎢⎥⎣⎦22331122332323312332332332332332330001()()()0()()0()(zz z y x y x y x y x y x y z z c s s L f n s c c L f L f L f L s f c f L c c f s f s s f c f s c f s f c s f c f f c s L f s c L f θθθθθθθθθθθθθθθθθθθθθθθθ⎡⎤-⎡⎤⎢⎥⎢⎥=--⎢⎥⎢⎥⎢⎥⎢⎥++⎣⎦⎣⎦--+⎡⎤⎡⎤⎢⎥⎢⎥+⨯-++⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦+=22332332132331233233)()()()(()())z z z z z zy x y x y x y L f s s L f c c L f L f L f L f L s f c f L s c f s f c s f c f θθθθθθθθθθθθ⎡⎤+⎢⎥+--+⎢⎥⎢⎥+++-++⎣⎦5.2 [10] 求一个质量为m ,底面圆半径为r ,高为h ,坐标系的原点建立在其质心处的均质刚性圆柱体的惯性张量。
操作臂动力学名词解释
嘿,朋友!你知道操作臂动力学吗?这可不是什么玄乎的东西哦!
简单来说,操作臂动力学就像是操作臂的“内功秘籍”。
比如说,你看那机器人的手臂,它能那么灵活地抓取东西、移动,
这背后可都是操作臂动力学在起作用呢!就好比一个运动员,要想在
赛场上表现出色,就得有强大的身体素质和技巧,这就是他们的“动力学”。
操作臂动力学研究的就是操作臂在运动过程中的各种力啊、力矩啊、速度啊、加速度啊等等这些玩意儿。
为啥要研究这个呢?哎呀,这可
太重要啦!如果不搞清楚这些,那操作臂可能就会变得笨手笨脚的,
不是抓不住东西,就是动作不精准。
你想想看,要是在工厂里,机器人的操作臂因为动力学没搞明白,
老是出错,那不是耽误事儿嘛!又或者在医疗领域,操作臂要给病人
做手术,要是没研究透动力学,那岂不是很危险?
咱再打个比方,操作臂动力学就像是给操作臂画了一张详细的“行
动地图”。
它告诉操作臂该怎么用力,怎么移动,才能达到最佳效果。
这可不是随便瞎搞就能行的呀!
而且哦,操作臂动力学可不是孤立存在的。
它和好多其他方面都有
关系呢!比如说机械结构,要是结构不合理,那动力学再好也发挥不
出来呀!还有控制系统,得和动力学完美配合,才能让操作臂乖乖听话。
总之,操作臂动力学真的超级重要!它就像是操作臂的灵魂,没有它,操作臂就只是个空架子。
所以啊,我们可得好好研究它,让操作臂变得更厉害,为我们人类做更多的贡献!我的观点就是,操作臂动力学是推动机器人技术发展的关键之一,绝对不能忽视!。