(整理)基坑位移测量
- 格式:doc
- 大小:1.46 MB
- 文档页数:12
深基坑水平位移监测测量深基坑水平位移可采用视准线法、小角度法、投点法、前方交会法、自由设站法、极坐标法等。
本节简要叙述常用的小角度法、极坐标法及前方交汇法。
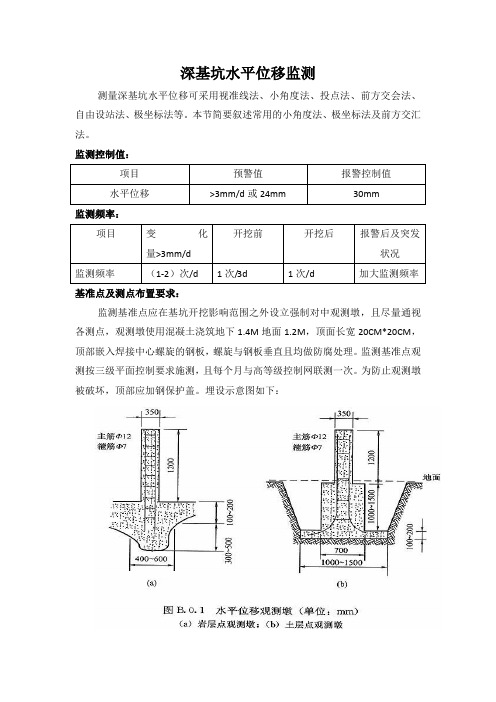
监测控制值:项目预警值报警控制值水平位移>3mm/d或24mm 30mm监测频率:项目变化量>3mm/d 开挖前开挖后报警后及突发状况监测频率(1-2)次/d 1次/3d 1次/d 加大监测频率基准点及测点布置要求:监测基准点应在基坑开挖影响范围之外设立强制对中观测墩,且尽量通视各测点,观测墩使用混凝土浇筑地下1.4M地面1.2M,顶面长宽20CM*20CM,顶部嵌入焊接中心螺旋的钢板,螺旋与钢板垂直且均做防腐处理。
监测基准点观测按三级平面控制要求施测,且每个月与高等级控制网联测一次。
为防止观测墩被破坏,顶部应加钢保护盖。
埋设示意图如下:当采用精密的光学对中装置时,对中误差不宜大于0.5mm,且尽量通视测点。
在混凝土支撑、连续墙顶等混凝土结构上安装水平位移桩,可直接在结构上用冲击钻成孔插入水平位移桩,垂直放置,缝隙使用锚固剂填充,容易受施工破坏的地方应加保护装置。
在土体等松软结构埋设水平位移测点应采用混凝土桩顶插入水平位移桩的形式,混凝土桩采用直径10CM地下50CM地面10CM,中心用钢筋加固。
如有需要应加保护装置,并设置醒目标志。
实物图如下:仪器架设:到达测量现场后打开仪器箱一段时间,使仪器温度与周围环境温度相适应,消除由环境温度带来的误差。
检查设备是否完整,配件是否齐全,电源电力是否充足等。
仪器架设时应注意仪器安全,在光滑的地面上架设全站仪时须在脚架上套绳索,防止脚架滑落损坏仪器。
全站仪脚架高度与观测者肩高齐平,拧紧脚架螺旋,将脚架均匀架设在基准点上。
取出仪器一手提全站仪手提柄,一手拧紧中心螺旋,将全站仪平稳架设在脚架上。
对中整平:在有强制对中装置的观测墩上架设全站仪时,应一手提全站仪手提柄,另一只手旋转基座使仪器牢固地固定在观测墩上。

自由设站法检测基坑水平位移传统的基坑水平位移监测,一般是采用经纬仪等光学仪器进行视准线法观测,但是,由于基坑周边环境常常比较复杂,特别是由于基坑形状不规则、基坑周边场地狭小以及周围密集的构筑物等因素的制约,很难同时在基坑两端选择两个既通视又稳定,同时又能设站的基准点作为平行于基坑的基准线,视准线法也就无法使用。
利用全站仪自由设站法进行观测,则可很容易地在基坑影响区域以外的建(构)筑物或场地上建立两个稳定点,作为平行于基坑的基准点(或基准线)进行基坑水平位移监测。
1、全站仪自由设站观测原理全站仪自由设站法观测,是一种以角度与距离同时测量的极坐标法为基础,应用高精度全站仪在基坑附近一方便观测的位置设一观测站,从观测站上观测若干已知点(或一基准线的两个基准点)及变形监测点的方向和距离,按极坐标法计算出两基点及各变形点在以仪器中心为坐标原点的坐标系中的平面坐标,通过坐标变换(或是按最小二乘法进行平差)计算出各变形观测点在以基准点为坐标原点的坐标系中的平面坐标,通过对各点的周期性观测,便可得到各变形观测点的位移变化。
2、基坑监测系统的建立2.1建立坐标系统在基坑开挖影响区域以外的稳固地面或已经稳定的旧建筑物上布设两个基准点形成一近似平行于基坑的基准线,两基准点间的水平距离在基坑开挖前由高精度全站仪经多测回观测确定。
该基准线在水平面内的水平投影为该独立坐标系统的X轴方向,在水平面内与X轴垂直的方向为Y轴方向。
2.2坐标计算公式在基坑附近任选一测站设置全站仪,观测两基准点A、B,测鼍设站点到两基准点的水平距离为S A、S B以及仪器中心点O与A、B两基准点间的夹角β。
在全站仪的三轴中心引出平面坐标系O—X’Y’,其中X’轴平行于该基坑独市坐标系统的X轴,如图1所示,则在O—X’Y’坐标系中,A点的平面坐标为:X’A=S A×cosα;Y’A= S A×cosαB点的平面坐标为:X’B=S B×cos(α+β);Y’B=S B×sin(α+β)式中:α为0A方向与Y轴间的夹角。

基坑位移监测方法布置观测控制网基坑变形观测控制网常由三种点、二种等级的网组成。
变形监测的测量点,一般分为基准点、工作点和变形观测点三类。
基准点——墙顶位移监测基准点的埋设应符合国家现行标准《建筑变形测量规范》JGJ8的有关规定,设置有强制对中的观测墩,并采用精密的光学对中装置,对中误差不大于0.5mm。
沉降观测的基准,它应埋设在沉降影响范围以外,距沉降观测点20~100m,观测方便,且不受施工影响的地方。
在建筑区域中,点位与邻近建筑物的距离应大于建筑物基础最大宽度的2倍,其标石埋深应大于邻近建筑物基础的深度。
为了相互校核并防止由于某个基准点的高程变动造成差错,一般至少埋设三个基准点。
以BMA 表示水准点A.。
基准点之间的高差采用高精度数字水准仪(SDL30M)和精密水准测量方法进行测定,将基准点组成闭合水准路线,其闭合差不得超过±0.5mm(n为测站数)。
水准点的高程自国家或城市水准点引测,或者假定。
工作点——是基准点和变形观测点之间的联系点。
当基准点距观测点太远或通视条件不好,侧量不便时,要在被研究对象附近设置工作点。
平时从工作点出发测量观测点相对于工作点的变形量。
要求在观测期间保持点位稳定,由基准点定期对其进行检测。
变形观测点——观测点应设置在基坑边坡混凝土护顶或围护墙顶(冠梁)上,安装时采用铆钉枪打入铝钉,或钻孔埋深膨胀螺丝,涂上红漆作为标记,有利于观测点的保护和提高观测精度。
墙顶位移监测点应沿基坑周边布置,监测点水平间距不宜大于20m。
一般基坑每边的中部、阳角处变形较大,所以中部、阳角处宜设测点。
为便于监测,水平位移观测点宜同时作为垂直位移的观测点。
图1 墙顶位移点的布设墙顶水平位移和竖向位移是基坑工程中最直接的监测内容,通过监测墙顶位移,对反馈施工工序,并决定是否采用辅助措施以确保支护结构和周围环境安全具有重要意义。
对同一监测项目,监测时宜符合下列要求:♦采用相同的观测方法和观测路线。
基坑水平位移监测报告一、引言基坑工程是建筑工程或地下设施建设的重要组成部分,通过对基坑的水平位移进行监测能够对基坑的稳定性进行评估。
本报告旨在对基坑工程的水平位移监测进行分析和评估。
二、监测方案1.监测目标:本次监测的目标是对基坑工程的水平位移进行实时监测,评估基坑的变形情况,确保基坑的稳定性。
2.监测方法:本次监测采用全站仪进行监测,通过对基坑周边的固定点进行连续观测,并记录监测数据。
3.监测时间:监测时间为从基坑开挖开始至基坑边坡稳定后的一段时间,共计3个月。
4.监测频率:每天进行连续观测,每次观测时间为30分钟。
5.监测点的选择:共选择了10个监测点,分布在基坑周边的固定墙面上,并采用固定螺栓进行固定。
三、监测结果1.监测数据的处理:对每次观测得到的数据进行整理和分析,并计算出每个监测点的水平位移。
2.监测数据的结果表格如下所示:监测点编号,监测日期,初始水平位移(mm),第1次观测水平位移(mm),第2次观测水平位移(mm),…… ,第90次观测水平位移(mm)-----------,----------,-------------------,----------------------,----------------------,-----,-----------------------1,2024.1.1,0,2,4,……,82,2024.1.1,0,1,3,……,7……,……,……,……,……,……,……10,2024.1.1,0,3,5,……,9(插入监测结果图)四、分析与评估1.初始水平位移分析:通过对初始水平位移数据进行分析,可以发现在基坑开挖之前,各个监测点的水平位移均为0,说明基坑围护结构的初期稳定性良好。
2.观测水平位移变化分析:通过对观测水平位移数据的变化进行分析,可以发现水平位移在观测期间呈逐渐增加的趋势,但增加速度逐渐减缓。
这说明基坑在开挖过程中发生了一定的变形,但整体变形趋于稳定。

1 总则1.0.1 为了在建筑变形测量中贯彻执行国家有关技术经济政策,做到技术先进、经济合理、安全适用、确保质量,制定本规范。
1.0.2 本规范适用于工业与民用建筑的地基、基础、上部结构及场地的沉降测量、位移测量和特殊变形测量。
1.0.3 建筑变形测量应能确切地反映建筑地基、基础、上部结构及其场地在静荷载或动荷载及环境等因素影响下的变形程度或变形趋势。
1.0.4 建筑变形测量所用仪器设备必须经检定合格。
仪器设备的检定、检验及维护,应符合本规范和国家现行有关标准的规定。
1.0.5 建筑变形测量除使用本规范规定的各种方法外,亦可采用能满足本规范规定的技术质量要求的其他方法。
1.0.6 建筑变形测量除应符合本规范外,尚应符合国家现行有关标准的规定。
2 术语、符号和代号2.1 术语2.1.1 建筑变形 deformation of building and structure建筑的地基、基础、上部结构及其场地受各种作用力而产生的形状或位置变化现象。
2.1.2 建筑变形测量 deformation measurement of building and structure 对建筑的地基、基础、上部结构及其场地受各种作用力而产生的形状或位置变化进行观测,并对观测结果进行处理和分析的工作。
2.1.3 地基 foundation soils,subgrade支承基础的土体或岩体。
2.1.4 基础 foundation将结构所承受的各种作用力传递到地基上的结构组成部分。
2.1.5 基坑 foundation pit为进行建筑基础与地下室的施工所开挖的地面以下空间。
2.1.6 基坑回弹 rebound of foundation pit基坑开挖时由于卸除土的自重而引起坑底土隆起的现象。
2.1.7 沉降 settlement,subsidence建筑地基、基础及地面在荷载作用下产生的竖向移动,包括下沉和上升。
其下沉或上升值称为沉降量。
基坑变形监测水平位移测量的几种方法作者:李月彬李彩云来源:《城市建设理论研究》2012年第18期摘要:随着城市经济建设的快速发展,城市用地越来越紧张,使得城市发展不得不向上或向下发展,基坑开挖的深度越来越深。
为了确保基坑支护的安全,不论是一、二、三级基坑,根据《建筑基坑工程监测技术规范》GB50497-2009的要求对基坑坡顶的水平位移都要求进行监测,现就当前基坑监测水平位移监测的几种方法进行探讨。
关键词:水平位移测量;视准线法;小角法;前方交会;后方交会;极坐标Abstract: With the rapid development of the city's economic construction, urban land is more and more tense, which makes the urban development had to go upward or downward, such as the deeper and deeper excavation of foundation pit. In order to ensure the safety of the excavation support system, no matter the primary, secondary, or third pit, according to the requirements of Building Foundation Pit Project Monitoring Technical Regulation GB50497-2009, the horizontal displacement of the pit top are required to be monitored. Hereby, this paper will expounds the several methods for the current horizontal displacement monitoring.Key words: horizontal displacement measurement; collimation line measurement; small-angle measurement; forward intersection; resection; polar coordinates中圖分类号:TV551.4文献标识码:A 文章编号:2095-2104(2012)视准线法视准线法,主要应用在场地比较开阔,基坑比较规整的长方形或正方形基坑。
基坑支护结构水平位移监测基坑是指在土方工程中为了挖掘较深的基础而开挖的坑道,为确保基坑施工安全及土体的稳定性,通常需要进行支护结构的设计和施工。
而基坑支护结构的水平位移监测则是为了监测基坑支护结构的水平位移情况,从而及时发现并处理可能存在的安全隐患。
本文将从基坑支护结构的水平位移监测原理、监测方法以及监测结果分析等方面进行论述。
一、基坑支护结构水平位移监测原理基坑支护结构的水平位移监测依赖于传感器测量数据的采集与分析。
常用的测量原理包括全站仪测量法、测距仪测量法和位移传感器测量法。
1. 全站仪测量法全站仪测量法是一种常见的测量方法,通过在固定测点设置全站仪,利用全站仪的角度和距离测量功能,对测点进行测量并记录数据。
通过多次测量与分析,可以得出基坑支护结构的水平位移情况。
2. 测距仪测量法测距仪测量法主要是利用激光或电磁波等测距原理,测量测点与仪器之间的距离,并通过多次测量得出基坑支护结构的水平位移情况。
3. 位移传感器测量法位移传感器测量法是一种非常常见的测量方法,通过在基坑支护结构上设置位移传感器,利用传感器的位移测量功能,实时监测基坑支护结构的水平位移情况。
二、基坑支护结构水平位移监测方法基坑支护结构的水平位移监测方法多种多样,根据实际情况选择合适的监测方法非常重要。
1. 先进的测量仪器与设备基坑支护结构水平位移监测应选用精确度高、数据稳定性好的先进测量仪器与设备,如全站仪、测距仪、位移传感器等。
这些测量仪器与设备能够提供准确可靠的数据支持,保证监测结果的准确性。
2. 合理设置测量点位在基坑支护结构中合理设置测量点位非常重要,通常应选择位于基坑上部、中部和下部的测点,以保证监测结果全面准确。
同时,应避免测点设置在可能受到外力影响的区域,以确保监测结果的可靠性。
3. 定期采集和分析监测数据基坑支护结构的水平位移监测需要定期采集和分析监测数据,以发现可能存在的问题并及时处理。
监测数据的采集频率取决于具体工程情况和监测要求,通常应在基坑施工过程中及时采集数据,并进行必要的分析和整理。
基坑水平位移监测基坑监测是基坑工程施工中的一个重要环节,是指在基坑开挖及地下工程施工过程中,对基坑岩土性状、支护结构变位和周围环境条件的变化,进行各种观察及分析工作,并将监测结果及时反馈,预测进-一步挖t施工后将导致的变形及稳定状态的发展,根据预测判定施工对周围环境造成影响的程度,来指导设计与施工,实现所谓信息化施工。
水平位移监测是指用观测仪器和设备对水工建筑物及地基有代表性的点位进行的水平方向位移量的量测。
中国规定水平位移的方向向下游为正,向上游为负;向左岸为正,向右岸为负。
混凝土建筑物的水平位移通常是由于水和温度荷载的作用、坝基不均匀沉降、坝体和坝基的徐变变形、混凝土材料的自身体积增长和其他变化因素等引起。
土石建筑物的水平位移主要是由于水荷载的作用、坝体土料的压缩(或固结)、坝基不均匀沉降、土料的冰冻消融等引起。
水平位移变化有一定规律性。
监测并分析水平位移的规律性,目的在于了解水工建筑物在内、外荷载和地基变形等因素作用下的状态是否正常,为工程安全运行提供依据水平位移监测基准点应埋设在基坑开挖深度3倍范围以外不受施工影响的稳定区域,或利用已有稳定的施工控制点,不应埋设在低洼积水、湿陷、冻胀、胀缩等影响范围内;基准点的埋设应按有关测量规范、规程执行。
宜设置有强制对中的观测墩;采用精密的光学对中装置,对中误差不宜大于0.5mm。
基本要求1.基坑监测应由委托方委托具备相应资质的第三方承担。
2.基坑围护设计单位及相关单位应提出监测技术要求。
3.监测单位监测前应在现场踏勘和收集相关资料基础上,依据委托方和相关单位提出的监测要求和规范、规程规定编制详细的基坑监测方案,监测方案须在本单位审批的基础上报委托方及相关单位认可后方可实施。
4.基坑工程在开挖和支撑施工过程中的力学效应是从各个侧面同时展现出来的,在诸如围护结构变形和内力、地层移动和地表沉降等物理量之间存在着内在的紧密联系,因此监测方案设计时应充分考虑各项监测内容间监测结果的互相印证、互相检验,从而对监测结果有全面正确的把握。
-------------基坑位移监测方法布置观测控制网基坑变形观测控制网常由三种点、二种等级的网组成。
变形监测的测量点,一般分为基准点、工作点和变形观测点三类。
基准点——墙顶位移监测基准点的埋设应符合国家现行标准《建筑变形测量 规范》JGJ8 的有关规定,设置有强制对中的观测墩,并采用精密的光学对中装 置,对中误差不大于 0.5mm。
沉降观测的基准,它应埋设在沉降影响范围以外, 距沉降观测点 20~100m,观测方便,且不受施工影响的地方。
在建筑区域中, 点位与邻近建筑物的距离应大于建筑物基础最大宽度的 2 倍,其标石埋深应大于 邻近建筑物基础的深度。
为了相互校核并防止由于某个基准点的高程变动造成差 错,一般至少埋设三个基准点。
以 BMA 表示水准点 A.。
基准点之间的高差采用高精度数字水准仪(SDL30M)和精密水准测量方法进 行测定,将基准点组成闭合水准路线,其闭合差不得超过±0.5mm(n 为测站数)。
水准点的高程自国家或城市水准点引测,或者假定。
工作点——是基准点和变形观测点之间的联系点。
当基准点距观测点太远或 通视条件不好,侧量不便时,要在被研究对象附近设置工作点。
平时从工作点出 发测量观测点相对于工作点的变形量。
要求在观测期间保持点位稳定,由基准点 定期对其进行检测。
变形观测点——观测点应设置在基坑边坡混凝土护顶或围护墙顶(冠梁)上, 安装时采用铆钉枪打入铝钉,或钻孔埋深膨胀螺丝,涂上红漆作为标记,有利于观 测点的保护和提高观测精度。
墙顶位移监测点应沿基坑周边布置,监测点水平间 距不宜大于 20m。
一般基坑每边的中部、阳角处变形较大,所以中部、阳角处宜 设测点。
为便于监测,水平位移观测点宜同时作为垂直位移的观测点。
--------------------------图 1 墙顶位移点的布设 墙顶水平位移和竖向位移是基坑工程中最直接的监测内容,通过监测墙顶位 移,对反馈施工工序,并决定是否采用辅助措施以确保支护结构和周围环境安全 具有重要意义。
对同一监测项目,监测时宜符合下列要求: 采用相同的观测方法和观测路线。
使用同一监测仪器和设备。
固定观测人员。
在基本相同的环境和条件下工作。
垂直位移监测垂直位移监测方法主要是使用普通水准测量,观测时从水准点开始,逐点观 测所设的沉降观测点,每个测站上读完各沉降点读数后,要再后视读数,两次后 视读数之差不能大于 1mm。
水准测量采用高精度数字水准仪进行。
1.仪器使用介绍(1)测站安置选取合适地点,架好仪器,踩实脚架。
目测仪器○10 底板近于水平后,开始转动 ○9 脚螺旋,使○3 圆水准器的气泡居中。
调节过程中,须知气泡移动方向与左手拇指方向一致。
--------------------------如图示气泡未居中,而位于 a 处;第 1 步,按图上箭头所指方向,两手相对 转动脚螺○1 、○2 ,使气泡移到通过水准器零点作○1 、○2 脚螺旋连线的垂线上,如图中垂直的虚线位置。
第 2 步,用左手转动脚螺旋○3 ,使气泡居中。
(2)瞄准水准尺转动○15 目镜对光螺旋,使十字丝清晰。
转动○17 水平微动手轮,粗略瞄准水 准尺,转动○5 调焦手轮,使标尺成像更加清晰。
测量人员将水准尺置于尺垫上,扶直,待水准尺气泡居中时,按下○6 测量键,记录稳定读数。
2.水准测量方法—闭合水准路线AI1基准点监测点I15D1 I2 D2I3 D3I4 D4I5 D5I6 D6 I7 D7 I8D14 I14基坑I13I12 I11 I10D13D12D11 D10 D9D8 I9(1)将水准尺同时置于基准点(或工作点)A 和沉降观测点 D1 处,在大约两点 中间位置 I1 处架设水准仪,安放调平。
(2)将一根条码尺立于 A 点,另一根立于 D1 点。
后视 A 点,记录读数 a1;前 视 D1 点,记录读数 d1。
--------------------------(3)将水准仪迁至 I2 站,安放调平。
将原 A 点条码尺立于 D2 点作为前视尺。
后 视 D1 点,记录读数 a2。
前视 D2 点,记录高程读数 d2。
(4)将水准仪迁至 I3 站.将条码尺立于 D3 点作为前视尺,后视 D2 点,记录高 程读数 a3。
前视 D3 点,记录高程读数 a3。
依次类推…… (5)将水准仪迁至 I15 站.将条码尺立于 A 点作为前视尺,后视 D14 点,记录高 程读数 a15。
前视 A 点,记录高程读数 d15。
3.数据处理及成果整理 (1)数据处理 第 1 站 :hA1 = a1 – d1 第 2 站 :hA2 = a2 – d2 第 3 站 :hA3 = a3 – d3 ....... 第 15 站 :hA15 = a15 – d15 上列各式相加得:∑hi = ∑ai -∑di 已知 A 点高程 HA 则 H1 = HA + ∑h1 H2 = HA + ∑h2……….Hi = HA + ∑hi (2) 成果检核 高度闭合差 fh = ∑hi限差为:平地:fh 容 = ±40 L (mm)山地:fh 容 = ±12 n (mm)(式中:L—路线总长,Km ; n—路线上测站总数) 闭合水准路线测量,理论要求 fh = 0 。
由于现场条件、仪器及实际操作过程中误差在所难免,所以需要对测量数据进行闭合差调整,以得到更为准确的高 程值。
以下列数据为例,将 15 个测站按路线长度分为三段。
(假设 A 点高程已知 HA=55.000m)--------------------------点号 路线长度(m)BMA250113002350BMA闭合水准测量计算表高差 h 高差改正数 v 改正后高差 h+v(m)(m)(m)-0.127-0.006-0.133-1.26-0.007-1.267+1.409-0.009+1.400高程 H (m) 55.000 54.867 53.600 55.000∑900+0.022-0.022001)fh = ∑hi = -0.127 - 1.26 + 1.409 = 0.022mfh 容= ±40 L = ±38mm 则 fh < fh 容 ,测量精度符合要求。
2)高差改正数 Vi= fh LiL第 1 段高差改正数为 V1 = 0.022 250 = -0.0061m 900第 2 段高差改正数为 V2 = 0.022 300 = -0.0073m 900第 3 段高差改正数为 V3 = 0.022 350 = -0.0086m 900为使高差改正数总和其绝对值完全等于闭合差,即∑Vi= -fh 。
需对各段闭合差进行适当调整,得到高差改正数。
进而得到各点高程(表中最后栏)。
水平位移监测对于围护墙顶水平位移,测特定方向上时可采用视准线法、小角度法、投点法等; 测定监测点任意方向的水平位移时,可视监测点的分布情况,采用前方交会法、 后方交会法、极坐标法等;1. 主要仪器使用介绍(1) 经纬仪--------------------------采用光学对中器安置仪器,对中和整平工作要交替进行。
基本步骤如下: 1)架设仪器,使架头大致水平,并使架头中心大致对准测站标志中心。
2)固定仪器操作者对面的架腿,两手分别移动左、右架腿,使标志中心位于对中器的小圆圈中,调整圆水准器与水准管,使气泡位于中心位置。
3)标志中心偏离小圆圈中心时,可松开中心连接螺旋,平移基座。
再重复 2)操作。
(2) 全站仪全站仪的安放调平过程与经纬仪基本相同,采取对中与整平交替进行的方 法。
最主要的是熟悉仪器的各项测量操作步骤,发挥其强大的功能。
全站仪由光电测距仪、电子经纬仪、微处理机、电源装置和反射棱镜等组成, 是一种集自动测角、测距、测高程于一体,是实现对测量数据的自动获取、显示、 存储、传输、识别、处理计算的三维坐标测量与定位系统。
因此在位移测量中, 它除了具备普通经纬仪的功能外,还能通过仪器自身的一系列操作利用自带的计 算功能直接获得测点的坐标,进而求得个方向上的位移量。
而经纬仪通过测量基 准点与观测点之间的夹角及距离,根据几何关系,采用前方交会、侧边交会等方--------------------------法,也可以求得观测点的最终坐标。
2. 主要测量方法介绍以下将介绍经纬仪和全站仪各自的水平位移测量方法。
(1) 经纬仪测量方法利用经纬仪和相关计算方法,求得所测点坐标后,本次观测坐标值减去上次 观测坐标值,即为位移变化量。
1)前方交会法从 3 个已知点 A、B、C 分别向 P 点观测水平角,由两个三角形来计算 P 点坐 标。
从三个已知点作两组前方交会,分别按 A、B 和 B、C 求 P 点坐标,最后取 它们的平均值作为 P 点的最后坐标。
当 APC = 90 时,观测精度最高。
一般情况下, APC 应在 30 与150 之间。
PA12C12B根据三角形的几何关系,最后得出: 按 ABP,得到 A cot cot ( yB yA) cot cot yA cot y cot (xB xA) cot cot 同理,按 BCP,得到 B cot c cot ( yC yB)cot cot yB cot yC cot (xC xB) cot cot --------------------------将两组坐标值取平均,即可得到点 P 的坐标(XP,YP)。
以下表数值为例,说明前方交会法计算过程。
P1略观测54 48'00"图数据A12C132 51'50"122 56 23'21"B248 30'58"已45719.85 (1) cot 0.705422(1) cot 0.66467知XA1807.04 yA数XB1646.38 yB 45830.66 (2) cot 1.5479029(2) cot 0.884224据XC1765.50 yC 45998.65 (3)=(1)+(2) 2.253325 (3)=(1)+(2) 1.548894(4)A cot cot ( yB yA)(5)XP = (4)/(3)4069.325 1805.9202802.937 1809.637(6) yA cot y cot (xB xA)(7) yP = (6) / (3)103260.504 71049.513 45825.837 45871.126P 点最后坐标XP = 1807.78yP = 45848.482)测边交会法xaAABCPdbCα cpeBY根据 AB 边长 c 及直线 AB 的方位角 AB ,以及测量的 a、b 边长,来计算 P 点的坐 标。