同济 专业德语 汽车 车辆工程 课本Elektrische Systeme im Automobil_final
- 格式:doc
- 大小:8.50 MB
- 文档页数:51
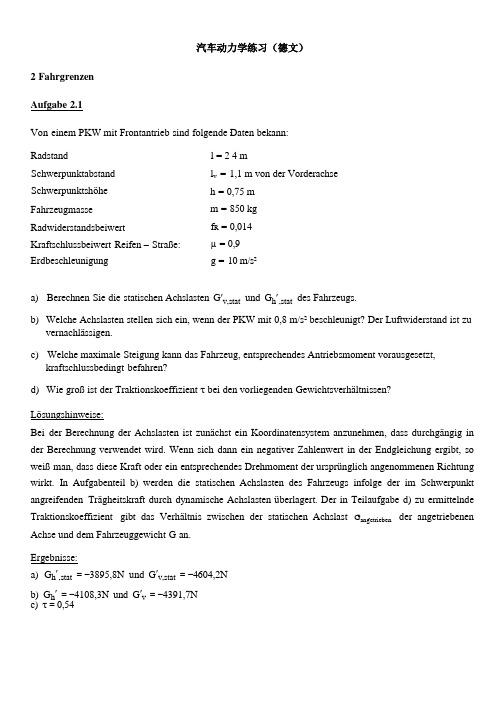
汽车动力学练习(德文)2FahrgrenzenAufgabe2.1Von einem PKW mit Frontantrieb sind folgende Daten bekann:Radstand Schwerpunktabstand Schwerpunktshöhe Fahrzeugmasse Radwiderstandsbeiwert Kraftschlussbeiwert Reifen – Straße: Erdbeschleunigung l = 2 4 ml v = 1,1 m von der Vorderachse h = 0,75 mm = 850 kgf R = 0,014µ = 0,9g = 10 m/s²a) Berechnen Sie die statischen Achslasten G′v,stat und G h′,stat des Fahrzeugs.b) Welche Achslasten stellen sich ein, wenn der PKW mit 0,8 m/s² beschleunigt? Der Luftwiderstand ist zuvernachlässigen.c) Welche maximale Steigung kann das Fahrzeug, entsprechendes Antriebsmoment vorausgesetzt,kraftschlussbedingt befahren?d) Wie groß ist der Traktionskoeffizient τbei den vorliegenden Gewichtsverhältnissen?Lösungshinweise:Bei der Berechnung der Achslasten ist zunächst ein Koordinatensystem anzunehmen, dass durchgängig in der Berechnung verwendet wird. Wenn sich dann ein negativer Zahlenwert in der Endgleichung ergibt, so weiß man, dass diese Kraft oder ein entsprechendes Drehmoment der ursprünglich angenommenen Richtung wirkt. In Aufgabenteil b) werden die statischen Achslasten des Fahrzeugs infolge der im Schwerpunkt angreifenden Trägheitskraft durch dynamische Achslasten überlagert. Der in Teilaufgabe d) zu ermittelnde Traktionskoeffizient gibt das Verhältnis zwischen der statischen Achslast G angetrieben der angetriebenen Achse und dem Fahrzeuggewicht G an.Ergebnisse:a) G h′,stat = −3895,8N und G′v,stat = −4604,2Nb) G h′= −4108,3N und G′v = −4391,7Nc) τ = 0,54,Aufgabe2.2Bei einem unverkleideten Motorrad soll die im Fahrbetrieb auftretende Auftriebskraft an der Vorderachse durch den Einsatz einer geeigneten Verkleidung vermindert werden. Folgende Daten der unverkleideten Maschine sind bekannt:RadstandHöhe des Angriffspunkts der Luftwiderstandskraft LuftwiderstandsbeiwertAuftriebsbeiwert derVorderachse (bezogen auf die Projektionsfläche in Fahrtrichtung) Projektionsfläche in FahrtrichtungLuftdichteDie Größen c w, c a und A wurden einschließlich des Fahrers ermittelt. l = 1,55 mx 1= 0,75 m c w1 = 0,634 c a v1 = 0,236A1 = 0,78 m²ρ= 1,2 kg/m³a) Berechnen Sie die luftwiderstandsbedingten Achslastanteile G′vL und G hL′für die Vorder- bzw. dieHinterachse bei einer Geschwindigkeit von v = 49,17m/sb) Wie groß ist bei obiger Geschwindigkeit die Gesamtauftriebskraft an der Vorderachse?c) Um wie viel Prozent wird die Gesamtauftriebskraft an der Vorderachse bei gleicher Geschwindigkeitverringert, wenn beim Einsatz einer Versuchsverkleidung folgende Daten für das Motorrad ermittelt werden?x 2= x 1= 0,75 mc w2 = 0,576c a v2 = 0,153A2 = 0,83 m²Lösungshinweise:Skizzieren Sie zur Ermittlung der luftwiderstandsbedingten Achslastanteile das Motorrad mit der angreifenden Luftwiderstandskraft F L und den Reaktionskräften in den Radaufstandsflächen (von der Fahrbahn auf die Räder). Durch Momentenbilanzen lassen sich die gesuchten Achslastanteile berechnen, wobei zunächst angenommen wird, dass alle Kräfte in die zu definierenden positiven Kraftrichtungen wirken.Die Gesamtauftriebskraft an der Vorderachse setzt sich aus dem in Teilaufgabe a) berechneten luftwiderstandsabhängigen Anteil und einer durch die Strömungswirkung der Luft bedingten Auftriebskraft zusammen, deren Auftriebsbeiwert gegeben ist. Da c av auf die Projektionsfläche in Fahrtrichtung bezogen ist, lässt sich diese Kraft analog zur Luftwiderstandskraft F L berechnen.a) G hL′1 = −347 ,1N und G′vL1 = +347,1Nb) F vges,Auftr1 = −614,1Nc) ∆F vges ,Auftr = 15,36%Ergebnis:∆a = 4.14%Bei einem Formel 1 –Rennwagen soll durch aerodynamische Hilfsmittel die Bodenhaftung verbessert werden. Das Fahrzeug hat im Ausgangszustand folgende Daten:Fahrzeugmasse (inkl. Fahrer) RadstandSchwerpunktsabstand von der VorderachseSchwerpunktshöheHöhe des Kraftangriffspunkts der Luftwiderstandskraft RadwiderstandsbeiwertKraftschlussbeiwert Reifen - StraßeLuftwiderstandsbeiwertAbtriebsbeiwert des Fahrzeugs (bezogen aufdieProjektionsfläche in Fahrtrichtung) Projektionsfläche in Fahrtrichtung Luftdichtem = 663 kgl = 2,74 m l v = 1,78 m h = 0,37 m x = 0,32 m f R = 0,015 µ = 1,6 c w = 0,7c A btr = 0,87A = 1,6m²ρ = 1,2 kg/m³In Versuchen wird ermittelt, dass durch seitlich montierte Flügel der Abtriebsbeiwert um 15% gesteigert wird, der Luftwiderstandsbeiwert, die Schwerpunktslage und die Fahrzeugmasse jedoch unverändert bleiben. Die Vergrößerung der Projektionsfläche A ist vernachlässigbar klein.Um wie viel Prozent wird bei einer Geschwindigkeit von 50 m/s (in der Ebene) das kraftschlussbedingte Beschleunigungsvermögen des Fahrzeugs (Hinterradantrieb) durch oben genannte Maßnahmen verbessert, wenn sich die Auftriebskraft entsprechend dem statischen Achslastverhältnis auf Vorder- und Hinterachse verteilt?Lösungshinweise:Skizzieren Sie zunächst das Fahrzeug mit den angreifenden äußeren Kräften. Formulieren Sie anschließend anhand einer Skizze unabhängige Bestimmungsgleichungen, deren Anzahl der Zahl der unbekannten Größen entspricht. Gehen Sie hierbei von Momentenbilanzen um die Radaufstandspunkte, sowie einer Kräftebilanz für die in Fahrtrichtung wirkenden Kräfte aus. Mit Hilfe dieser Gleichungen wird daskraftschlussbedingte Beschleunigungsvermögen a für den Ausgangszustand des Fahrzeugs und für die Flügelversion berechnet und anschließend die prozentuale Änderung ermittelt.。

Abfallentsorgung 垃圾清除学Afrikanistik 非洲语言文学Agrarbiologie 农业生物学Agraroekologie 农业生态学Agraroekonomie 农业经济学Agrarwissenschaften 农业科学Aegyptologie 埃及学Albanologie 阿尔巴尼亚学Altamerikanistik 古代美国语言文学Amerikanistik 美国语言文学Angewandte Mathematik 应用数学Angewandte Naturwissenschaft 应用自然科学Angewandte Systemwissenschaften 应用系统科学Anglistik/Englisch 英国语言文学Anthropologie 人类学Arabistik 阿拉伯语言文学Arbeitslehre/-wissenschaft 劳动学Archaeologie 考古学Architektur 建筑学Assyrologie 亚述学Astronomie 天文学Austronesien Sprachen/Kulturen 南岛语言文化Automatisierungstechnik 自动技术Balkanologie 巴尔干学Baltische Philologie 波巴的海语言学Baugeschichte 建筑史Bauinformatik 建筑信息学Bauingenieurwesen/Bautechnik 建筑技术Bergbau 采矿Berufspädagogik 职业教育Betriebliche Bildung und Management 企业教育管理Betriebswirtschaftslehre international 世界企业经济学Betriebswirtschaftslehre BWL 企业经济学Biblithekswissenschaft 图书馆学Biochemie 生物化学Biologie 生物学Biophysik 生物物理学Biotechnik/Gesundheit 生物工程/健康Biotechnologie 生物工艺学Bohemistik 艺术Brennstoffingenieurwesen 燃料工程学Buch-und Bibliothekskunde 图书及图书馆概况Buchwesen 图书业Bulgaristik 保加利亚学Byzantinistik 拜占庭学Chemie 化学Chemieingenieurwesen/Verfahrenstechnik 化学工程学Chinesische Kunst und Archaeologie 中国艺术考古学Chr.Arch./Byzantinische Kunstgeschichte 拜占庭艺术史Computerlinguistik 电子计算机语言学Computervisualistik 电子计算机视觉学丹麦语äe n u i s als Fremdsprache 德语作为外语Didaktik der Gesellschaftswissenschaften 社会学教学理论Dolmetschen 口译Druch/Graphisches Gewerbe 印刷Elektrotechnik 电气工程学Elementarerziehung 基本教育Energie- und Verfahrenstechnik 能源工程学Energiesystemtechnik 能源系统工程学Energietechnik 能源工程学Ernaehrungswissenschaft 营养学Erwachsenenbildung 成人教育Ethik 伦理学Europäische S tudien 欧洲研究Europäische Wirtschaft 欧洲经济Fachübersetzen 专业翻译Fahrzeugtechnik 运输工具工程学Fertigungstechnik 制造工程学Filmwissenschaft 电影学Finno-Ugristik 芬兰乌戈尔语言文学Fischereiwirtschaft 养鱼经济Forstwissenschaft 林业学Frankreichstudien 法国研究Französisch 法语Friesische Philologie 佛里斯兰语言学Gartenbau 园林建筑Gebaerdensprache 手(势)语Gebaeudetechnik 建筑工程学Gemeinschaftskunde 团体概况Genetik 遗传学Geographie/Erdkunde 地理学Geoingenieurwissenschaften 地理工程学Geologie/Palaeontologie 地质学Geooekologie 地理生态学Geophysik 地理物理学Geotechnik/Bergbau 地理工程学/采矿学Germanistik/Deutsch 德国语言文学Gerontologie 老年病学Geschichte 历史Gestaltungstechnik 创造工程学Getraenketechnologie 饮料工程学Griechische Philologie 希腊语言学Haushalts- und Ernaehrungswissenschaften 家计/营养学Hethitologie 海地特学Hochbau 高层建筑Holztechnik 木材工程学Holzwirtschaft 木材经济学Humanbiologie 人生物学Huettenwesen/Metallkunde 冶金Hydrologie 水力学Indische Kunstgeschichte 印度艺术史Indogermanistik 印欧语言文学Indoiranistik 印度伊朗语言文学Indologie 印度语言文化学Indonesisch 印尼语Industrial Design 工业设计Informatik 电子计算机学Informatik - Ingenieurwesen 电子计算机工程学Informationstechnik,elektrische 电子信息工程学Informationstechnik/Maschinenwesen 信息工程Informationswissenschaften 信息学Ingenieurwissenschaften allgemein 基本工程学Internationale Beziehungen 国际关系学Interkulturelle Wissenschaft 国际文化学Iranistik 伊朗学Islamwissenschaft 伊斯兰学Italienlisch 意大利语Japanologie 日本学Journalistik 新闻学Judaistik/Juedische Studien 犹太研究Kanadistik 加拿大学Kartographie 制图学Kaukasiologie 高加索学Keilschriftkunde/Papyrologie 楔型文字学/纸莎草纸学Keltologie 凯尔特学Keramik-/Glas-/Baustofftechnik 制陶/玻璃/建筑材料技术Klassische Philologie 传统语言学Kognitionswissenschaft 唯意志论Kommunikationsdesign 通讯设计Kommunikationstechnologie - Druck 通讯技术Kommunikationswissenschaft 通讯科学Komparatistik 比较文学Konstruktionstechnik 设计技术Kooperationsoekonomie 合作经济学Koptologie 科普特学Koreanistik 朝鲜学Kulturgeographie 文化地理Kulturpaedagogik 文化教育Kulturwissenschaften 文化学Kunsterziehung/Kuenstlerisches Werken 艺术教育Kunstgeschichte 艺术史Landesgeschichte 国家概况/历史Landespflege/Landschaftgestaltung 自然风景设计Landschaftsökologie und Naturschutz 自然生态学及环境保护Landschaftsplanung 风景布局Lateinamerikanistik 拉美学Lateinische Philologie 拉丁语言学Lebensmittelchemie 食品化学Lebensmitteltechnologie 食品工程学Linguistische Datenverarbeitung 语言信息加工Literaturwissenschaft allgemein/vgl. 基本/比较文学Logik 逻辑学Luft- und Raumfahrttechnik 航空航天技术Malaiologie 马来学Markscheidewesen 矿山测量工程学Maschinenbau/Maschinentechnik 机械制造Materialwissenschaft 材料学Mathematische Informatik 数学信息学Mathematik 数学Medienwissenschaft 新闻学//宣传学Medizin 医学Medizin- und Pflegepädagogik 医学及护理教育Medizinische Informatik 医学信息学Meteorologie 气象学Mikrobiologie 微生物学Mikrosystemtechnik 微系统工程学Mineralogie 矿物学Mittellateinische Philologie 中美语言学Mongolistik 蒙古学Musikerziehung 音乐教育Musikwissenschaft 音乐学Naturwissenschaftliche Informatik 自然科学信息学Neugriechisch 新希腊语Niederdeutsche Philologie 低地德语学Niederdlaendische Philologie 荷兰语学Nordamerikastudien 北美研究Orientalische Kunstgeschichte 东方艺术史Orientalistik/Altorientalistik 东方学Ostasiatische Kunstgeschichte 东亚艺术史Ostasienwissenschaften 东亚学Osteuropastudien 东欧研究Ostslawische Philologie 东斯拉维亚语言学Ozeanographie 海洋学Paedagogik/Erziehungswissenschaften 教育学Pharmazie 药物学Philosophie 哲学Phonetik und Sprechkunde 语音学Physikalische Ingenieurwissenschaften 物理工程学Physik 物理学Politikwissenschaften 政治学Polnisch 波兰语Portugiesisch 葡萄牙语Produktionstechnik 生产工程学Psychologie 心理学Publizistik/Zeitungswissenschaften 新闻学Raumplanung 空间布局Rechtswissenschaft 法学Rehabilitationspaedagogik 恢复教育学Religionsgeschichte,allgemeine 基本宗教史Religionspaedagogik ev. 宗教教育(基督教) Religionswissenschaft (Vgl.) 宗教比较学Rhetorik 修辞学Rohstoff- und Geotechnik 原料及地理工程学Romanistik 罗马语族语言文学Rumaenisch 罗马尼亚语Russisch 俄语Schiffbau 造船Schiffstechnik 造船工程Schulpaedagogik 学校教育学Schwedisch 瑞典语Semitistik 闪米特语言文学Serbistik/Kroatistik 塞尔维亚语言文学 /克里特语言文学Sicherheitstechnik 安全工程学Sinologie 汉学Skandinavistik/Nordistik 斯堪的纳维亚语言文学Slawistik 斯拉夫语言文学Slowakistik 斯洛伐克语言文学Softwaretechnik 软件工程学Sonderpaedagogik/LA an Sonderschulen 残疾人教育Sorbisch 索布语言文学Sozialgeschichte 社会历史学Sozialpädagogik 社会教育学Sozialwissenschaft/Sozialkunde 社会学(概论) Soziologie 社会学Sozioökonomie 社会经济学Spanisch 西班牙语Sportmedizin 运动医学Sportoekonomie 运动经济学Sportpaedagogik 运动教育学Sportwissenschaft/Leibeserziehung 运动学Sprachen/Wirtschaft/Kulturraum-Studien 语言、经济、文化研究Sprachlehrforschung 语言研究Sprachwissenschaft 语言学Staats-/Verwaltungswissenschaft 国家管理学Statistik 统计学Südostasienwissenschaft 东南亚学Südslawi sche Philologie 南斯拉夫语言学Technische Kybernetik 技术控制论Technische Physik 技术物理学Technik 技术Technikgeschichte 技术史Technische Informatik 技术信息学Techno- und Wirtschaftsmathematik 工艺经济数学Technomathematik 工艺数学Textil- und Bekleidungstechnik 纺织品/衣物工艺Textilgestaltung/-wissenschaft 纺织品设计学Theaterwissenschaften 戏剧学Theologie evangelische 基督教神学Theologie Katholische 天主教神学Tibetologie/Birmanistik 西藏学/缅甸学Tiefbau 地下工程Tiermedizin 兽医学Turkologie 土耳其学Ukrainistik 乌克兰学Umweltchemie 环境化学Umweltingenieurwissenschaft 环境工程学Umwelttechnik/-schutz 环境工程/环境保护kologie 环境学/生态学m r-w,V e o l t r w-,i F s u n h s g c e h s a e iÖte史前史学Verarbeitungs- und Verfahrenstechnik 加工工程学Verkehrswesen 运输学Verkehrswirtschaft 运输经济Vermessungswesen 测量学Versorgungstechnik 供给工程Verwaltungswissenschaft 管理学Völkerkunde/Ethnologie 人种学/民族学Volkskunde 民俗学Volksmusik 民间音乐Volkswirtschaftslehre 国民经济学Vorderas.Altertumswissenschaft/Archaeologie 考古学Wasserwirtschaft 计划用水Werkstoffwissenschaft/-technik 原料科学/原料工程Westslawische Philologie 西斯拉夫语言学Wirtschaftsgeographie 经济地理学Wirtschaftsgeschichte 经济历史学Wirtschaftsinformatik 经济信息学Wirtschaftsingenieurwesen 经济工程学Wirtschaftsmathematik 经济数学Wirtschaftspaedagogik 经济教育学konomie 经济学i r i c e h n a s f s h f i g e e n i f h t科学历史学Wissenschaftslehre 科学理论Zahnmedizin 牙医学。

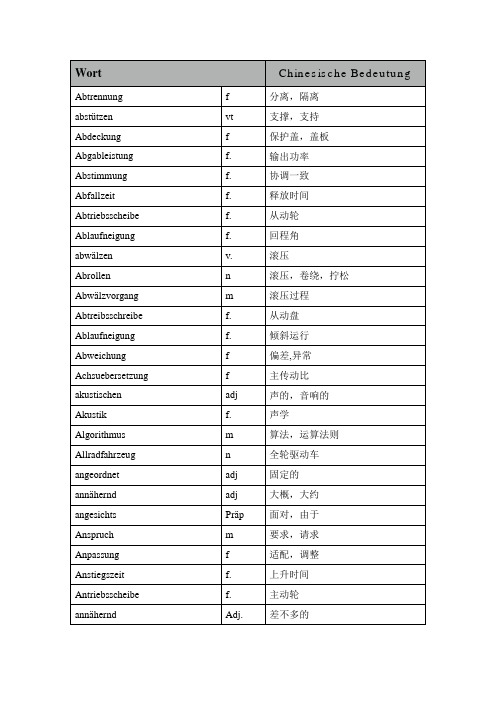
Wort Chinesische Bedeutung Abtrennung f 分离,隔离abstützen vt 支撑,支持Abdeckung f 保护盖,盖板Abgableistung f. 输出功率Abstimmung f. 协调一致Abfallzeit f. 释放时间Abtriebsscheibe f. 从动轮Ablaufneigung f. 回程角abwälzen v. 滚压Abrollen n 滚压,卷绕,拧松Abwälzvorgang m 滚压过程Abtreibsschreibe f. 从动盘Ablaufneigung f. 倾斜运行Abweichung f 偏差,异常Achsuebersetzung f 主传动比akustischen adj 声的,音响的Akustik f. 声学Algorithmus m 算法,运算法则Allradfahrzeug n 全轮驱动车angeordnet adj 固定的annähernd adj 大概,大约angesichts Präp 面对,由于Anspruch m 要求,请求Anpassung f 适配,调整Anstiegszeit f. 上升时间Antriebsscheibe f. 主动轮annähernd Adj. 差不多的Antriebswelle f 传动轴anschleppen 牵引auszeichnen vi 超群,出众Auslaufen n 磨损aufwändige adj 昂贵的Auslegung f 布置方式Ausbau m. 发展ausführen v. 执行Auslauf m. 脱离啮合ausweisen V. t. 识别auslegen V. t. 设计Augenmerk n. 注意力Ausgangsbasis n. 出发点axial adj 轴向的Axialkraft f 轴向力Bauweise f 结构类型Bauraum m. 安装空间Baugruppe f. 部件Bauraumvorgabe f. 预定的安装空间Bare-Die-Technologie f. 裸露芯片技术Betriebspunkt n 工作点bedingt adj 有条件的,受限制的beschleunigen vt 加速Betrachtung f. 研究belaufen sich auf 合计beinhalten V. t. 包括Bewältigung f 完成,克服。

车辆工程类培养方案一、年限1年二、车辆工程类所含专业车辆工程(汽车)、车辆工程(轨道交通)三、课程教学安排课程名称课程性质必/选试/查学分周学时第1学年第1学期大学英语公共基础课必试 4 4 体育(一)公共基础课必查 1 2 形势与政策1 公共基础课必查0.5 1 思想道德修养和法律基础公共基础课必试 3 2 大学计算机基础公共基础课必查 2.5 2 高等数学B(上)公共基础课必试 5 5 物理实验(上)公共基础课必查 1 2 机械制图(一)上公共基础课必试 4 4第1学年第2学期大学英语公共基础课必试 4 4 体育(二)公共基础课必查 1 2 形势与政策2 公共基础课必查0.5 1 中国近现代史纲要公共基础课必试 2 2 军事理论公共基础课必查 1 1 C/C++程序设计公共基础课必查 2.5 2 高等数学B(下) 公共基础课必试 5 5 普通物理B(上) 公共基础课必试 3 3 物理实验(下)公共基础课必查0.5 1 机械制图(一)下公共基础课必查 3 3 金工实习实践必查 6 6周军训实践必查 2 3周车辆工程(汽车)专业培养方案一、学制五年制本科。
二、培养目标面向未来汽车工业发展,德、智、体、美全面发展,“知识、能力、人格”三位一体,掌握车辆工程(汽车)学科的基本原理和基本知识,具有扎实的基础理论、宽厚的专业知识,获得工程师的基本训练,具备良好职业素养,较强工程实践、一定的工程研究及创新能力,能具备从事车辆工程(汽车)领域内的设计制造、科研开发、应用研究、市场营销、物流等方面工作,具有较强社会责任感、国际视野和国家认证的创新性实践型卓越汽车预备工程师。
三、基本要求本专业学生主要学习机械设计与制造、电子和计算机技术的基础理论、技术和有关机械产品、设备的设计方法、经济分析、市场营销和物流管理等知识,受到现代机械学、电子学和营销管理学的基本训练,具有从事汽车、发动机和汽车电子的研究、设计、制造及汽车营销和物流、车身与空气动力学,汽车实验学等方面工作的基本能力。
I Grundlagen der FahrzeugeletrotechnikI-a Grundlagen der Elektrotechnik - Elektrischer StromZunächst ist unter dem Begriff elektrischer Strom nichts Konkretes vorstellbar. Allerdings kann er fast überall an seinen Wirkungen erkannt werden. So ist bekan nt, daß in einer Leitung oder in einem elektrischen Gerät Strom fließt - erkennbar beispielsweise am Aufleuchten der Ladekontrollampe oder der Fahrscheinwerfer. Der Starter erhält Strom von der Batterie, dreht sich und läßt den Motor anspringen, oder der elektrische Zigarettenanzünder wird benutzt, indem dessen Heizspirale vom 10Batteriestrom zum Glühen gebracht wird. Jeder Autofahrer weiß, daßdie Sicherung durchbrennt, wenn ein Kurzschlußin einer Leitung auftritt. Die Fahrzeugbatterie mußaufgeladen werden: Das besorgt der Ladestrom des Generators; und die Zeiten der von Hand betätigten Hupe sind längst vorüber: ein elektrisches Signalhorn ist an ihre Stelle getreten.Alle diese und viele andere Anwendungen des elektrischen Stroms und seiner Messung finden ihren Ursprung in seinen Wirkungen. Diese sind:□das Magnetfeld, das einen stromdurchflossenen Leiter umgibt,□die Erwärmung, die ein stromdurchflossener Leiter erfährt,□die elektrochemische Wirkung und□die elektrische Leitfähigkeit der Gase.1 Nachweis des Magnetfeldes20Wird eine Kompaßnadel in die Nähe der Pole eines Hufeisenmagneten gebracht, so wird sie von ihrer ursprünglichen Richtung abgelenkt. Das Magnetfeld, das den Hufeisenmagneten umgibt, übt also eine Kraft auf die Kompaßnadel aus.In der Nähe eines stromdurchflossenen geraden Leiters, beispielsweise eines Kupferstabs, wird die Kompaßnadel ebenfalls abgelenkt und gezwungen, sich stets quer zum Leiter einzustellen. Die Schlußfolgerung: Ein stromdurchflossener Leiter ist ebenfalls von einem Magnetfeld umgeben (Bild1.1), das Kräfte auf die Kompaßnadel ausübt.d durch Aneinanderreihen von vielen Windungen eines Drahtes eine Spule gebildet, so ist an derAblenkung der Kompassnadel zu erkennen, daßauch die stromdurchflossene Spule von einem 30Magnetfeld umgeben ist.Wird ein Kupferstab trapezförmig so aufgehängt, daßer zwischen den Polen eines Hufeisenmagneten schwingen kann (Bild 1.2) und dabei von Strom durchflössen, sotreibt ihn eine ablenkende Kraft aus seiner Ruhelage heraus. Wird eine Spule zwischen den Polen eines Magneten drehbar angebracht, so wird sie in dem Augenblick, in dem sie vom Strom durchflössen wird, aus ihrer Ruhelage herausgedreht, bis sich ihre Windungsebene senkrecht zur Verbindungslinie der Pole einstellt (Bild 1.3). Daraus leitet sich ab, daß zwischen dem Magnetfeld des Magneten einerseits und dem des stromdurchflossenen Kupferstabs bzw. der Spule andererseits Kräfte wirken, die die Lage der beweglichen Teile verändern.40Bild 1.l Stromdurchflossener gerader Leiter mit abgelenkter Kompaßnadel (Robert Bosch GmbH)Bild 1.2 Stromdurchflossener gerader Leiter im permanenten Magnetfeld (Robert Bosch GmbH) Bekannt ist, daß sich um eine stromdurchflossene Spule ein Magnetfeld ausbildet. Wird nun der Magnet selbst ebenfalls durch eine Spule und deren Magnetfeld ersetzt, kann mit dieser feststehenden Spule eine andere, bewegliche Spule in Drehung versetzt werden, wenn durch beide Strom geleitet wird. Die bewegliche Spule wird durch die Wechselwirkung der Magnetfeldkräftebeider Spulen gedreht (Bild 1.4),bis sich die Windungen der beweglichen Spulezu denjenigen der dengestellt haben wie ein Stück weiches Eisen von den Polen des Hufeisenmagneten zogen wird, wird es auch voMagnetfeld einer stromdurchflossenen Spule ange (Bild 15) Diese Wirkung eines stdurchflssenen Leiters oder 10einer Spule wird i Gegensatz u den magnetischen Wirkungen eines eisenmagneten Dauer- oder Permanentmagneten) elektromagnetische Wirkung genant.Auf ihr beruhen die Wirkungsweisen der meisten elektrischen Geräte im Kraftfahrzeug, wie beispielsweise des Generator des Reglers, des Starer derelektromagnetchnSchalterusw.Bild 1.3 Stromdurchflossene Spule im permanenten Magnetfeld ( Roben Bosch GmbH )Bild 1.4 Kräftewirkung zwischen stromdurchflossener fester Spule und drehbarer Spule ( Robert Bosch GmbH )Bild 1.5 Eisenkern wird von stromdurchflossener Spule angezogen ( Robert Bosch GmbH )2 Nachweis der ErwärmungEine weitere irkung des elektrischen Stroms ist die Erwärmung des Leiters, die bis zum Glühengesteigert werden kann. Dabei dehnt sich der Leiter aus, was an einem dünnen Kupferdrahtbeobachtet werden kann Bild 1.6), der in der Mitte durch ein Gewicht beastet ist. Bei den Glühlampen der Scheinwerfer werden die kleinen Wendel durch den Strom bis zur Weißglut e rhitzt,bei einem Zigarettenanzünder dagegen genügt schon helle10Rotglut.Bild 1.6 Ausdehnung eines erwärmten Stromleiters ( Robert Bosch GmbH )3 Nachweis der elektrochemischen Wirkungen des StromsElektrochemische Wirkungen des Stroms treten bei Stromdurchgang durch leitende Flüssigkeiten, sogenannte Elektrolyte, auf. Werden in ein Glas Wasser, in dem einige Tropfen Schwefelsaure gelöst wurden, zwei Metallplatten als Sromzuführungen, sogenannte Elektroden, getaucht (Bild 1.7), so steigen bei Stromdurchgang durch das Wasser an den Platten Gasbläschen auf, die sich als Sauerstoff- und Wasserstoffgas nachweisen lassen. Das Wasser ( wird elektrolytisch in seine Bestandteile zerlegt.Fließt Strom durch ein elektrolytisches Silberbad, so scheidet sich an einer d er beiden Elektroden 20Silber ab. In diesem Fall besteht also die elektrochemische Wirkung des Stroms in der Ausscheidung eines Metalls. Die Wirkungsweise der Bleibatterie berh wahrend des Ladevorgangs ebenfalls auf der elektrochemischen Wirkung des Stroms. Die so in der Fahrzeugbatterie aufgespeicherte elektrochemische Energie wird während der Entladung in elektrische Energie umgeformt und an dieVerbraucher abgegeben.Bild 1.7: Elektrolyse des Wassers ( Robert Bosch GmbH )4 Nachweis der elektrischen Leitfähigkeit von GasenNeben Metallen und Flüssigkeiten, den Elektrolyten, können auch Gase den elektrischen Strom leiten.Beim Durchgang des Stroms durch ein mit verdünntem Edelgas, beispielsweise Neon oder Helium, gefülltes Glasrohr entsteht ein starkes Leuchten in dessen Inneren. Von den leuchtenden 30Lichtreklamen her ist diese Erscheinung bekannt. Die Schlußfolgerung daraus ist, da die einzelnen Gasteilchen durch den Stromflußim Glasrohr eine Veränderung erfahren. Ein Funkenüberschlagzwischen zwei Platten oder Spitzen, den Elektroden, ist ebenfalls nichts anderes als ein Stromdurchgang durch die Luft oder durch ein Gasgemisch. Als Beispiel dafür sei der Funkenüberschlag an den Kerzenelektroden einer Zündkerze genannt, durch den das Luft-Kraftstoff-Gemisch im Brennraum des Motors entzündet wird., ISBN 10:3802314964/3-8023-1496-4/ISBN 13: 9783802314964, Verlag: Vogel, Erscheinungsdatum: 1995)。
第三册 E31.durch/führena.执行,贯彻(Plan计划,Befehl命令);进行,实施(Arbeit工作,Untersuchung调查)Der Beschluss soll sofort durchgeführt werden.b.举行(Demonstration游行,Abstimmung表决)c.die durchführung einer Studie2.aus/schließen 把……除外,排除Wir haben alle schuld, ich schließe mich nicht aus. 我们大家都有错,我也不例外。
Das Misstrauen schließt jede Zusammenarbeit. 不信任妨碍了一切合作。
Er versuchte, jeden Irrtum auszuschließen. 他企图避免出任何错误。
3.aus/wirken sich 发生……作用Der Regen wirkt sich sehr günstig aus.Der Regen wirkt günstig.Der Streik hat sich negativ auf die Wirtschaft ausgewirkt.4.各种例句:a.Der streik wirkte sich verhängnisvoll灾难性的auf die Wirtschaft aus.b.Worauf legen die Jugendlichen Wert?c.Niemand hat mit einer Wandlung zum Guten gerechnet.d.Das Internet verkörpert den neuen Lebensstil unserer Zeit.e.sich für die Einführung neuer Methoden einsetzen 支持采用新方法f.jmdm. seine Anerkennung aussprechen 对某人表示赞赏g.Er dachte (darüber) nach, ob seine Entscheidung richtig gewessen sei.h.Er reagiert auf meine Frage [Auffirderung] überhaupt nicht [mit einem Lächeln].他对我提的问题[要求]毫无反应[一笑置之]。
Fakult¨a t Bauingenieurwesen Institut f¨u r Mechanik und Fl¨a chentragwerke Professur f¨u r Technische Mechanik,Festigkeitslehre und Fl¨a chentragwerke Prof.Dr.-Ing.Bernd W.Zastrau TECHNISCHE UNIVERSIT¨AT DRESDENMusterl¨o sungenvon Aufgaben der LehrveranstaltungTechnische Mechanik1(Stereostatik)zusammengestellt und gepflegt von denMitarbeitern des Lehrstuhles f¨u r MechanikLiebe Studierende des Direkt-und Fernstudiums,die hier vorliegende Sammlung von Musterl¨o sungen zur Technischen Mechanik1umfasst Aufga-ben aus der Aufgabensammlung,die zur Demonstration der gedanklichen Vorbereitung und des Arbeitsablaufes bei der L¨o sung einer Aufgabe geeignet erscheinen.Die Reihenfolge der Aufgaben entspricht der Gliederung der Vorlesung.Ich habe diese Sammlung von Musterl¨o sungen mit meinen Mitarbeitern erzeugt,um Ihnen den ¨Ubungsteil der Lehrveranstaltung zu erleichtern und Material zum Selbststudium an die Hand zu geben.Sollten Ihnen Fehler auffallen,m¨o chte ich Sie bitten,diese uns mitzuteilen.Alle Beteiligten w¨u nschen Ihnen mit diesen Unterlagen viel Erfolg.Dresden,im Oktober2004Fax:0351/46337200VorwortDie hier vorliegende Sammlung von Musterl¨o sungen soll Sie nach gr¨u ndlicher Durcharbeitung bef¨a higen,die in der Aufgabensammlung vorhandenen Aufgaben selbstst¨a ndig zu l¨o sen.Dabei haben wir vor allem darauf geachtet,dass die Unzul¨a nglichkeiten und auch Fehler,die erfah-rungsgem¨aßbei der L¨o sung von Mechanikaufgaben auftreten,durch besondere und umfangreiche Erl¨a uterungen ausgeschlossen werden k¨o nnen.Es wurde Wert darauf gelegt,dass die Dinge,auf die wir in den Seminaren immer wieder hinweisen und die in Belegen und Pr¨u fungen von Ihnen gefor-dert werden,in den Musterl¨o sungen ihren Niederschlagfinden.Dazu geh¨o ren z.B.logischer Aufbau,¨u bersichtliche Gliederung,Nachvollziehbarkeit der L¨o sung,aussagekr¨a ftige Freik¨o rperbilder,klare Skizzen und das Einsetzen der Zahlenwerte erst,wenn das Ergebnis auszurechnen ist.Einige Worte sind noch zum Umgang mit den L¨o sungen zu sagen:•Alle Textstellen,die in Kursivschrift gedruckt sind,sind Hinweise zum Vorlesungsstoffoder Erl¨a uterungen zur gedanklichen T¨a tigkeit und zum Ablauf der Arbeiten und nicht Bestand-teil der in Belegarbeiten oder in der Pr¨u fung geforderten L¨o sung.•L¨o sungsschritte und Skizzen,die nur der didaktischen Darstellungsweise einer Musterl¨o sung dienen,m¨u ssen nicht zwingend Bestandteil Ihrer L¨o sung sein.•Die Gliederung einer Musterl¨o sungen soll gleichzeitig das geistige Gerippe beim Arbeitsablauf einer von Ihnen zu erstellenden L¨o sung sein.Sie ist deshalb manchmal ausf¨u hrlicher als es bei einer normalen L¨o sung notwendig ist.•Aus den vorigen Punkten leitet sich ab,dass der Umfang der Musterl¨o sungen notwendi-gerweise gr¨oßer ist als derjenige,den eine von Ihnen angefertigte L¨o sung haben wird.Um Ihnen die¨Ubertragung in die notwendige Niederschrift zu erleichtern,befinden sich f¨u r3 Musterl¨o sungen im Anhang A entsprechend gek¨u rzte Fassungen.•Als Hilfestellung f¨u r die eigenst¨a ndige Bearbeitung anderer Aufgaben sind im Anhang B ein paar elementare mathematische Zusammenh¨a nge zusammengestellt.Es ist geplant,auch f¨u r die Lehrveranstaltungen TM2(Festigkeitslehre)und TM3(Festigkeitsleh-re/Kinetik)ein solches Heft zu erstellen.Inhaltsverzeichnis und Zuordnung der Aufgaben mit Musterl¨o sung zu den Kapiteln der VorlesungKapitel Aufgabe Nr.Seite 1Einf¨u hrung1.1Begriffsbestimmung Mechanik1.2Physikalische Gr¨oßen,Einheiten und Maßsysteme1.3Grundz¨u ge der Vektorrechnung2Statik der starren K¨o rper2.1Kr¨a fte und Momente und ihre Eigenschaften 2.1-38,-415,72.2Schnitt-und Reaktionsprinzip 2.2-1292.3Auflagerreaktionen allgemeiner Bindungen2.4Kr¨a ftegleichgewicht,zentrale Kr¨a ftesysteme 2.4-3122.5Momentengleichgewicht,Allgemeine Kr¨a ftesysteme 2.5-6,-3014,17 2.6Verteilte Kr¨a fte,Schwerpunkt 2.6-11,-1220,243Statik der Tragsysteme3.1Statische Bestimmtheit 3.1-6263.2Allgemeine Systeme starrer K¨o rper 3.2-4,-2729,32 3.3Schnittgr¨oßen in Fachwerken 3.3-13,-2634,394Schnittgr¨oßen im Balken,Zustandslinien4.1Belastungsarten und r¨a umliche Schnittgr¨oßen4.2Schnittgr¨oßen bei ebener Belastung aus Gleichge-wichtsbedingungen4.3Differentialgleichungen der Schnittgr¨oßen4.4Zustandslinien und ihre Eigenschaften4.5Zustandslinien von ebenen Balkensystemen 4.5-19,-47,-72,-7545,55,60,63 4.6Zustandslinien von gekr¨u mmten Balken 4.6-2,-666,70 4.7Zustandslinien in r¨a umlichen Systemen 4.7-2725Arbeit und Energie5.1Arbeitsbegriffder Mechanik5.2Prinzip der virtuellen Arbeiten 5.2-13755.3Stabilit¨a t des Gleichgewichtes3.2-4,3.3-13,4.5-4780,82,85A Anhang A:Beispiele mit einem f¨u r Belegeund Klausuren notwendigen L¨o sungsumfangB Anhang B:Mathematische HilfsmittelB.1Vektorrechnung90B.2Aufstellen von Funktionsgleichungen92Aufgabe2.1-38:Die nebenstehende Skizze stellt in abstrahierterWeise einen Wegweiser dar.Die Windkraft Wwirkt in einer Ebene parallel zur x,y-Ebeneund schließt mit der x-Richtung einen Win-kel von45◦ein. G ist die Gewichtskraft derAnzeigetafel.Berechnen Sie aus den angreifen-den Kr¨a ften die resultierende Kraft R A und dasMoment M A an der Einspannstelle A.StellenSie die Ergebnisvektoren grafisch dar.Gegeben:W=3kNG=5kNMusterl¨o sungVektorielle Darstellung der Kr¨a fteWindkraft W:W=W(cosαx;cosαy;cosαz)TW ist der Betrag des Vektors W,innerhalb der Klammern ste-hen die Richtungscosinus zur x−,y−und z−Achse.kN(cos45◦;cos45◦;cos90◦)T=(2,12;2,12;0)T kN Gewichtskraft G: G=5kN(0;0;−1)T=(0;0;−5)T kNBeide Kr¨a fte W und G k¨o nnen,da ihre Wirkungslinien einen gemeinsamen Schnittpunkt C haben, zu einer Resultierenden R C zusammengefasst werden.Resultierende R C: R C= W+ G=(2,12;2,12;−5)T kNOrtsvektor r C: r C=(r Cx;r Cy;r Cz)T=(5;0;6)T m6Aufgabe:2.1-38Ermittlung von R A und M A :Die Kraft R A an der Einspannstelle ist gleich der Kraft R C .Sie entsteht durch Parallelverschie-bung von R C nach A .Das Moment M A erh ¨a lt man als Vektorprodukt des Ortsvektors r C und der Resultierenden R C .Die beiden Vektoren R A und M A ersetzen somit ¨a quivalent das in C angreifende Kr ¨a ftesystem. R A ist aus der Parallelverschiebung (Versetzung)von R C in den Punkt A hervorgegangen.Das dabei entstandene Moment M A wird deshalb h ¨a ufig auch als Versetzungsmoment bezeichnet.Kraft R A : R A = R C =(2,12;2,12;−5)T kNMoment M A : M A = r C × R C = e x e y e z r Cx r Cy r Cz R Cx R Cy R Cz= r Cy R Cz −r Cz R Cy r Cz R Cx −r Cx R Cz r Cx R Cy −r Cy R Cx =(−12,72;37,72;10,60)T kNmDas Moment M A l ¨a sst sich auch als Summe der Einzelmomente der beiden Kr ¨a fte W und G zu M A = M A (W )+ M A (G )= r C × W + r C × Gerrechnen.Darstellung der Vektoren RA und M A:Erl ¨a uterungen zum Ergebnis:Die jeweils drei Komponenten der Vektoren RA und M A spannen die in der Skizze gestrichelt dargestellten Quader auf,deren jeweilige Diagonale dem Betrag der Vektoren R A bzw. M A entspricht.Die negativen Vorzeichen von R Az und M Ax aus dem Resultat sind ber ¨u cksichtigt,so dass sich die tats ¨a chliche Richtung von RA und M A (siehe Skizze!)ergibt.Technische Universit ¨a t Dresden,Fakult ¨a t Bauingenieurwesen Lehrstuhl f ¨u r MechanikAufgabe2.1-41:Bestimmen Sie f¨u r das gegebene Kr¨aftesystema)im Koordinatenursprung die resultieren-de Kraft R0und das resultierende Verset-zungsmoment M0undb)die resultierende Kraft R c auf ihrer Wir-kungslinie c–c sowie deren Schnittpunktemit der x-und y-Achse.Gegeben:F1=3kNF2=2kNF3=1kNa=1mMusterl¨o sunga)Bestimmung der resultierenden Kraft R0und des resultierenden Versetzungsmo-mentes M0(d.h.des resultierenden Reduktionspaares)im KoordinatenursprungDie resultierende Kraft R0im Koordinatenursprung ergibt sich aus der Summe der Einzelkr¨a fte:R0= F i=300kN+020kN++1·cos30◦−1·sin30◦kN=3,8661,50kNDas resultierende Versetzungsmoment M0=(00M0z)T ergibt sich aus der Summe der Verset-zungsmomente,die die Einzelkr¨a fte in Bezug auf den Ursprung haben.F¨u r die einzige von Null verschiedene Komponente ergibt sich aus dem Kreuzprodukt:M0z= M0z,i= (x i·F iy−y i·F ix)=(0·0−0,5m·3kN)+(0·2kN−2m·0)+(2,5m·(−0,5kN)−1m·0,866kN)=−1,5kNm+0−(1,25+0,866)kNm=−3,616kNmDarstellung der resultierenden Kraft R0und des resultierenden Versetzungsmomentes M0(des re-sultierenden Reduktionspaares)imKoordinatenursprung:8Aufgabe:2.1-41b)Bestimmung der resultierenden Kraft R C mit Wirkungslinie c-c Die Kraft R C auf der Wirkungslinie c-c ist gleich der Kraft R 0im Koordinatenursprung.Sie ent-steht durch Parallelverschiebung von R0aus dem Koordinatenursprung auf die Wirkungslinie c-c. RC = R 0= 3,8661,50kN ⇒| R C |=R C =4,15kN Die Schnittpunkte der Wirkungslinie c-c mit der x -bzw.y -Achse erh ¨a lt man durch die ¨Aquivalenz von M 0z und dem jeweiligen Moment (in Bezug auf den Koordinatenursprung)des l ¨a ngs seiner Wirkungslinie bis zum Schnitt mit der entsprechenden Koordinatenachse verschobenen Vektors RC .-Schnittpunkt mit der x-Achse:M 0z !=x c ·R Cy ⇒x c =+M 0zR Cy-Schnittpunkt mit dery-Achse:M 0z !=(−y c )·R Cx ⇒y c =−M 0zR Cx-Zahlenwerte undErgebnisdarstellung:x c =−3,616kNm 1,5kN=−2,41m y c =−−3,616kNm 3,866kN=+0,935m Technische Universit ¨a t Dresden,Fakult ¨a t Bauingenieurwesen Lehrstuhl f ¨u r MechanikAufgabe2.2-12:Zeichnen Sie das Freik¨o rperbild des dargestellten Systems. Gegeben:a;F1;F2;q.Musterl¨o sung1.Vollst¨a ndiges FreischneidenBeim vollst¨a ndigen Freischneiden(von manchen Autoren auch”Vollst¨a ndiger Befreiungsprozess“genannt)werden alle Scheiben,Verbindungsk¨o rper(hier:Gelenke)und Lager freigeschnitten.Esentsteht das unten angegebene Bild(”Explosionsmodell“),in dem die Scheiben mit den Nummern Ibis IV bezeichnet werden und das der Berechnung der St¨u tz-und Verbindungskr¨a fte dienen k¨o nnte. Es enth¨a lt16unbekannte Verbindungskr¨a fte und4unbekannte St¨u tzkr¨a fte.Zur Berechnung der Schnittgr¨oßen w¨a ren weitere Freik¨o rperbilder notwendig.Freik¨o rperbild10Aufgabe:2.2-12 Beachtet werden sollte grunds¨a tzlich beim Zeichnen von Freik¨o rperbildern,dass bei jedem gef¨u hrten Schnitt entsprechend dem Wechselwirkungsaxiom von Newton(actio-reactio)die Kopplungskr¨a fte paarweise auftreten und entgegengesetzt gleich sind,d.h.es sind an den Schnittufern Pfeile mit entgegengesetztem Richtungssinn,aber mit der gleichen Bezeichnung einzuf¨u hren.2.Vereinfachtes FreischneidenBetrachtet man das nach dem vollst¨a ndigen Freischneiden entstandene Freik¨o rperbild etwas ge-nauer,so kann man feststellen,dass sowohl bei einigen Scheiben als auch bei einigen Gelenken Sonderf¨a lle vorliegen,die eine weitere Vereinfachung und damit eine Reduzierung der Zahl der unbekannten Kr¨a fte zulassen:•Die Scheiben III und IV sind Pendelst¨a be(auch als Pendelst¨u tzen oder Gelenkst¨a be bezeich-net),d.h.es sind an beiden Enden gelenkig angeschlossene St¨a be,die keine¨a ußere Bela-stung aufweisen.Sie k¨o nnen aus Gleichgewichtsgr¨u nden nur eine Kraft in Stabl¨a ngsrichtung ¨u bertragen,die an beiden Stabenden die gleiche Gr¨oße haben muss.Man kann diese Pen-delst¨a be beim vereinfachten Freik¨o rperbild weglassen und nur die Stabl¨a ngskraft(z.B.mit S i bezeichnet)an den beiden anschließenden Tragwerksteilen einzeichnen.•Das Gelenk zwischen den Scheiben II und IV wird außer durch die Verbindungskr¨a fte der beiden Scheiben durch keine weitere Last(weder durch eine¨a ußere Last noch durch einen weiteren angeschlossenen Stab)beansprucht,so dass es unbelastet ist und nach Einf¨u hren der zu¨u bertragenden Kr¨a fte an den anschließenden Scheiben weggelassen werden kann.•Die befreiten Auflager k¨o nnen normalerweise ebenfalls in der Darstellung entfallen, wenn keine Kraftumrechnungen erfolgen sollen.(Die detaillierte Berechnung der Aufla-ger/Fundamente ist nicht Gegenstand der Technischen Mechanik.)•Eine weitere Vereinfachung ist m¨o glich,wenn die Gelenkkr¨a fte nicht unmittelbar gefragt sind.Dann kann in dem vorliegenden Beispiel die Kraft S1am linken Rand der Scheibe II(oder am rechten Rand der Scheibe I)angebracht werden.Das Gelenk kann somit entfallen.(In beiden F¨a llen ergeben sich unterschiedliche Gelenkkr¨a fte,was sich aber nicht auf die Schnittgr¨oßen auswirkt.)Unter Ber¨u cksichtigung dieser Vereinfachungen erh¨a lt man die folgenden gleichberechtigten Vari-anten f¨u r das nach dem vereinfachten Befreiungsprozess ermittelte Freik¨o rperbild.Es verbleiben nur noch12bzw.6unbekannte St¨u tz-und Verbindungskr¨a fte.Technische Universit¨a t Dresden,Fakult¨a t Bauingenieurwesen Lehrstuhl f¨u r MechanikAufgabe:2.2-1211Fkb 1(1.Variante)Fkb (2.Variante)Wenn wir sp ¨a ter Tragwerke berechnen,werden wir diese immer in der vereinfachten Form (Variante 2)freischneiden.1Als abk ¨u rzende Bezeichnung wird statt des ausgeschriebenen Wortes ”Freik ¨o rperbild“h ¨a ufig die Buchstabenfolge Fkb oder FKB verwendet.Aufgabe2.4-3:Eine Last G wird von zwei Gewichtskr¨a ften G1und G2im Gleichgewicht gehalten.Welche Winkelαundβstellen sich ein?Gegeben:G=500N;G1=300N;G2=400N.Musterl¨o sungDas System wird als in der Gleichgewichtssituation erstarrt betrachtet.Es gilt der Satz:Ein deformierbarer K¨o rper kann nur im Gleichgewicht sein,wenn ein Starrk¨o rper der Form des als verformt betrachteten deformierbaren K¨o rpers sich ebenfalls im Gleich-gewicht befindet.Beim Freischneiden des starren Systems entstehen die Teilsysteme I,II und III(Freik¨o rperbilder siehe untere Skizze!),f¨u r die folgender Satz gilt:Wird ein sich im Gleichgewicht befindendes System in Teilsysteme zerlegt,befinden sich die Teilsysteme ebenfalls im Gleichgewicht.Freik¨o rperbilderAn den beiden reibungsfrei gelagerten Rollen(Teilsysteme II und III)greifen am Umfang nur die Kr¨a fte S1und G1bzw.die Kr¨a fte S2und G2an.Gleichgewicht herrscht offensichtlich nur dann, wenn die Seilkraft der jeweils angeh¨a ngten und nur umgelenkten Gewichtskraft entspricht:S1=G1bzw.S2=G2Das Teilsystem I ist ein zentrales ebenes Kr¨a ftesystem(die beiden Seilkr¨a fte S1und S2greifen ge-meinsam mit der Gewichtskraft G an einem Punkt an),dessen drei Kr¨a fte miteinander im Gleich-gewicht stehen.Aufgabe:2.4-313 GleichgewichtsbedingungenH=0⇒−S1·cosα+S2·cosβ=0(1)V=0⇒S1·sinα+S2·sinβ−G=0(2)Die Abk¨u rzungen H=0bzw. V=0bedeuten:Die Summe aller am System angreifenden Horizontalkr¨a fte bzw.Vertikalkr¨a fte ist gleich Null.Alle Kr¨a fte mit gleichem Richtungssinn haben dabei das gleiche Vorzeichen.Bei Verwendung eines Koordinatensystems(auf jeden Fall notwen-dig bei r¨a umlichen Systemen)k¨o nnen auch die Achsen als Richtungsindex verwendet werden.So bedeutet F x=0:Die Summe aller Kr¨a fte in x-Richtung ist gleich Null.Dabei gilt ein positi-ves Vorzeichen f¨u r alle Kr¨a fte,die in Richtung der positiven x-Koordinate zeigen.Die Abk¨u rzung M(A)=0bedeutet:Die Summe aller Momente um eine im Punkt A der Ebene senkrecht ste-hende Achse ist gleich Null.Der positive Drehsinn der Momente wird dabei durch den Pfeil(z.B. )angegeben.Bei Verwendung eines Koordinatensystems(s.o.)muss die als Drehachse verwen-dete Koordinatenachse bzw.eine Parallele dazu im Index angegeben werden(z.B. M(x)=0bzw. M(x,A)=0).Das A im Index gibt dabei an,dass die Parallele zur x-Achse durch den Punkt A geht.Der positive Drehsinn der Momente wird durch die Rechtsschraubenregel festgelegt(gespreizter Daumen der rechten Hand zeigt in Koordinatenrichtung,Finger in Drehrichtung).L¨o sung des GleichungssystemsG1bzw.G2in die Gln.(1)und(2)⇒G1·cosα=G2·cosβ(3)⇒−G1·sinα=G2·sinβ−G(4) Die beiden Gleichungen(3)und(4)werden quadriert.Es ergeben sich die Gleichungenaus(3)⇒G21·cos2α=G22·cos2β(5)aus(4)⇒G21·sin2α=G22·sin2β−2G G2·sinβ+G2(6) Die Gleichungen(5)und(6)werden addiert.Mitsin2α+cos2α=1ergibt sich die GleichungG21=G22−2G G2·sinβ+G2und durch Aufl¨o sung nach sinβ:sinβ=G2−G21+G222G G2(7)Nach Einsetzen der gegebenen Gr¨oßen erh¨a lt man aus(3)und(7)die Winkelαundβzuα=36,9◦β=53,1◦Aufgabe2.5-6:Bestimmen Sie die Auflagerreaktionen des dargestellten Systems.Gegeben:aMusterl¨o sungDie Freik¨o rperbilder m¨u ssen nicht maßstabsgerecht sein(die Proportionen sollten aber in etwa stim-men)und nicht die komplette geometrische Bemaßung enthalten.Um eine gr¨oßere¨Ubersichtlichkeit bei der Aufstellung der Gleichungen zu erzielen,ist die Vermaßung aber–besonders f¨u r weniger Ge¨u bte–sinnvoll.Freik¨oDie Pendelst¨u tze am Auflager A kann nur L¨a ngskr¨a fte,das Lager B eine beliebig gerichtete Kraft, z.B.Horizontal-und Vertikalkr¨a fte,aufnehmen.Der Richtungssinn der freigeschnittenen Auflager-reaktionen kann beliebig gew¨a hlt werden.Zerlegen der”schr¨a gen“Kr¨a fte in horizontale und vertikale KomponentenA H=A cos45◦=12√2AA V=A sin45◦=12√2A(Nur eine unbekannte Reaktionskraft!)Es ist f¨u r die L¨o sung nicht erforderlich,die nebenstehen-den Skizzen zu zeichnen.Sie dienen hier nur der Demon-stration der Kraftzerlegung.Das zur obigen Skizze Gesagte trifft auch auf das untenstehende Freik¨o rperbild mit den zerleg-ten Kr¨a ften zu.Empfehlenswert ist,nur ein Freik¨o rperbild zu zeichnen und in diesem bereits die zerlegten Anteile(Komponenten)der freigeschnittenen Auflagerreaktionen einzutragen(siehe Freik¨o rperbild auf der Vorseite!),die Zerlegung der schr¨a g angreifenden Kr¨a fte(Belastungen)aber ”im Kopf“vorzunehmen.Freik¨o rperbild2Gleichgewichtsbedingungen und AuflagerreaktionenEs gibt drei unbekannte Auflagerreaktionen,f ¨u r die drei Gleichgewichtsbedingungen aufgestellt wer-den m ¨u ssen.Die Bedingungen sollten so gew ¨a hlt werden,dass m ¨o glichst nur Gleichungen mit einer Unbekannten und keine Gleichungssysteme entstehen.Manchmal l ¨a sst sich aber die L ¨o sung des vollst ¨a ndigen Gleichungssystems oder zumindest einer Untermenge von Gleichungen,wie z.B.bei einigen Dreigelenkrahmen oder auch anderen mehrteiligen Systemen,nicht umgehen.F ¨u r die erste Gleichung,eine Momentengleichung,wird der Bezugspunkt a’so gew ¨a hlt,dass er der Schnittpunkt von A und B H ist.F ¨u r die zweite Momentengleichung wird als Bezugspunkt der Schnittpunkt von B H und B V gew ¨a hlt.M(a )=0⇒B V ·3a −20kN ·2a −5kN ·√2·a −5kN √2·a =0(3B V −40kN −10kN ·√a =0⇒B V =40kN +10kN ·√23=18,05kNM (b )=0⇒12√2·A ·3a +5kN ·√2·(a −2a )−20kN ·a =0A ·3a −10kN ·a −28,28kN ·a =0⇒A =12,76kNH=0⇒B H −12√A −5kN √=0B H −20kN +20kN √23=0⇒B H =20kN +20kN √23=16,09kN KontrolleEs empfiehlt sich die ¨Uberpr ¨u fung der Ergebnisse mit einer Kontrollgleichung.Gut daf ¨u r geeignetist eine Gleichgewichtsbedingung,die nicht zur Bestimmung der Auflagerreaktionen genutzt wurde und die eine m ¨o glichst große Zahl der anfangs unbekannten Reaktionskr ¨a fte enth ¨a lt.V =0⇒12√A +B V −20kN −5kN √=012√2·12,76kN +18,05kN −20kN −7,07kN =00=0Aufgabe2.5-30:Ein homogener Quader ist durch4Pendelst¨a be und ein nur in der z-Richtung verschiebliches Auflager gest¨u tzt.Belastet ist der K¨o rper neben seinem Eigengewicht G durch eine Kraft F1und ein Moment M1.Bestimmen Sie die Lagerkr¨a fte im Lager A und die vier Stabkr¨a fte S i.Gegeben:a=4m;b=2,5m;c=2m;G=12kN;F1=20kN;M1=15kNm.Musterl¨o sungDas Freischneiden des Quaders erfolgt,indem anstelle des Lagers A die Lagerkr¨a fte A x und A y sowie anstelle der Pendelst¨a be1bis4die Stabkr¨a fte S1bis S4angetragen werden.Freik¨o rperbildWie das Freik¨o rperbild zeigt,greift an dem K¨o rper ein allgemeines r¨a umliches Kr¨a ftesystem an, f¨u r das sechs linear unabh¨a ngige Gleichgewichtsbedingungen aufgeschrieben werden k¨o nnen.Im all-gemeinen sind dasf¨u r die Kr¨a fte: F x=0; F y=0; F z=0;und f¨u r die Momente: M(x)=0; M(y)=0; M(z)=0.Die Bezugsachsen f¨u r die Momentengleichungen k¨o nnen die Koordinatenachsen oder zu ihnen par-allele Achsen sein.Eine oder mehrere Kraftgleichungen k¨o nnen ebenfalls durch(linear unabh¨a ngige) Momentengleichungen ersetzt werden.Das macht man sich zu Nutze,wenn in einer Kraftgleichung (wie hier z.B. F z=0)drei oder mehr Unbekannte auftreten.Die so ersetzte Kraftgleichung sollte dann aber als zus¨a tzliche Kontrollgleichung verwendet werden.GleichgewichtsbedingungenF x=0⇒A x−S1+F1=0(1)F y=0⇒A y+S2·cosα=0(2)F z=0⇒S2·sinα+S3+S4−G=0(3)M(x,C)=0⇒−A y·c−G·b2+M1=0(4)M(y,E)=0⇒S4·a2+F1·c−G·a2=0(5)M(z,E)=0⇒−A y·a+A x·b=0(6)und als zus¨a tzliche Bedingungen f¨u r das MomentengleichgewichtM(z,C)=0⇒−A y·a+S1·b−F1·b=0(7)M(x,E)=0⇒−(S3+S4)·b+M1+G·b2=0(8)M(y,F)=0⇒(S1−A x)·c−(S2·sinα+S3)·a+(G−S4)·a2=0(9)Die Gleichungen(7)und(8)sollen zur Ermittlung der Kr¨a fte verwendet werden,die Gleichung(9) zur Kontrolle.Daher wurde bei dieser Gleichung die Bezugsachse so gew¨a hlt,dass f¨u nf St¨u tzkr¨a fte darin enthalten sind.Aufl¨o sung des GleichungssystemsWinkelfunktionen:sinα=c√22=2√10,25=0,625cosα=b√22=2,5√10,25=0,781aus(4)⇒A y=M1c−Gb2c=0kNaus(5)⇒S4=G−F12ca=−8kNaus(6)⇒A x=A y ab=0kNaus(7)⇒S1=F1+A y ab=20kNaus(2)⇒S2=−A ycosα=0kNaus(8)⇒S3=G2+M1b−S4=20kNKontrolleA x,A y sowie S1bis S4werden in die Gleichungen(1),(3)und(9)eingesetzt,die f¨u r die Ermittlung der St¨u tzkr¨a fte nicht verwendet wurden.in(1):⇒0−20kN+20kN=0in(3):⇒0+20kNm−8kN−12kN=0in(9):⇒40kNm−80kNm+40kNm=0Aufgabe2.6-11:Bestimmen Sie f¨u r die mit Aussparungen versehene rechteckige Scheibea)den Linienschwerpunkt aller Scheibenr¨a nder,b)den Fl¨achenschwerpunkt.Musterl¨o sungBestimmung von Linien-und Fl¨a chenschwerpunkten durch das Zusammensetzen von Teill¨a ngen bzw.Teilfl¨a chenWie in der Vorlesung hergeleitet,sind die Koordinaten von Linien-und Fl¨a chenschwerpunkten mit den Formeln x sl= xdl dl und y sl= ydl dl bzw.x sA= xdA dA und y sA= ydA dA definiert.H¨a ufig sind aber Linienz¨u ge und Querschnitte aus mehreren Teill¨a ngen l i beziehungsweise Teilfl¨a chen A i zusammen-gesetzt,deren jeweilige Schwerpunktlage x si,y si bereits bekannt ist oder entsprechenden Tabellen-werken entnommen werden kann(Rechtecke,Dreiecke,Kreise).Unter dieser Voraussetzung lassen sich die Bestimmungsgleichungen f¨u r die Koordinaten beispielsweise des Fl¨a chenschwerpunktes mitx sA=1A xdA=1AA1xdA+ A2xdA+...=1A{x s1A1+x s2A2+...}=x si A iA i(1)y sA=1A ydA=1AA1ydA+ A2ydA+...=1A{y s1A1+y s2A2+...}=y si A iA i(2)angeben.Aus der Integration¨u ber die Gesamtfl¨a che wird somit die Summation der die Gesamtfl¨a che bildenden Teilfl¨a chen bzw.deren statische Momente.Werden in den Gleichungen(1)bzw.(2)die Gesamtfl¨a che A bzw.die Teilfl¨a chen A i durch die Gesamtl¨a nge l bzw.die Teill¨a ngen l i ersetzt, erh¨a lt man analoge Gleichungen zur Bestimmung des Linienschwerpunktes.Zur Ermittlung der Schwerpunktkoordinaten geht man nun wie folgt vor:•Festlegung eines Bezugskoordinatensystems•Zerlegung der Linienz¨u ge in Teill¨a ngen bzw.der Gesamtfl¨a che in Teilfl¨a chen mit bekannter Schwerpunktlage•(Tabellarisches)Erfassen der Teill¨a ngen bzw.Teilfl¨a chen sowie deren zugeh¨o riger Schwer-punktkoordinaten und statischen Momente•Bestimmung der Koordinaten des Gesamtschwerpunktes nach Gl.(1)bzw.(2)a)LinienschwerpunktZun¨a chst wird jede Linie einzeln betrachtet,die La-ge der Teilschwerpunkte ist nebenstehender Skiz-ze zu entnehmen.Zweckm¨aßigerweise werden dieTeilschwerpunktkoordinaten gemeinsam mit denTeill¨a ngen in einer Tabelle eingetragen und derenstatische Momente ermittelt.Die Koordinaten desGesamtschwerpunktes ergeben sich dann nach Gl.(1)bzw.(2),wobei die Teilfl¨a chen A i durch dieTeill¨a ngen l i ersetzt werden.l i x si y si x si l i y si l i16a03a018a2210a5a6a50a260a236a10a3a60a218a2410a5a050a2052a a4a2a28a262a2a5a4a210a272a3a4a6a28a282a2a3a4a26a292πa7a2a14πa24πa246,28a219,98a2140,47a2Die Koordinaten des Linienschwerpunktes der Begrenzungslinien aller Teilfl¨a chen ergeben sich nach Gl.(1)bzw.(2)zu=4,75ax s= x si l i l i=219,98a246,28aundy s= y si l i l i=140,57a2=3,04a.46,28aVerk ¨u rztes Verfahren zur Ermittlung der Koordinaten des Linienschwerpunktes:Wenn f ¨u r ganze Linienz ¨u ge,wie zum Beispiel beiRechtecken,die Lage des Schwerpunktes bereits be-kannt ist,bietet es sich an,dies auszunutzen.Das Vorgehen ist analog zum vorigen Beispiel,die An-wendung einer Tabelle ist wiederum zweckm ¨a ßig.Selbstverst ¨a ndlich ergibt sich beim verk ¨u rzten Ver-fahren die gleiche Schwerpunktlage.l ix si y si l i x si l i y si 132a 5a 3a 160a 296a 228a 2a 4a 16a 232a 232πa 7a2a14πa 24πa 246,28a219,98a 2140,47a 2Bei einem Vergleich mit der Tabelle auf der vorigen Seite kann man feststellen,dass die entspre-chenden Spaltensummen ¨u bereinstimmen.b)Fl ¨a chenschwerpunktF ¨u r die Bestimmung des Fl ¨a chenschwerpunktes ei-nes Querschnittes werden wieder die Teilfl¨a chen,deren Teilschwerpunkte und statischen Momente (Fl ¨a chenmomente 1.Ordnung)ermittelt,in einer Tabelle erfasst und die entsprechenden Spaltensum-men in die Gleichungen (1)und (2)eingesetzt.Dieses Verfahren l ¨a sst sich auch bei Fl ¨a chen mit Aussparungen anwenden,diese Ausschnitte sind dabei als ”negative“Fl ¨a chen einzuf ¨u hren.Es seinoch darauf hingewiesen,dass Fl ¨a chen-und Lini-enschwerpunkt i.a.nicht ¨u bereinstimmen.。
同济德语系历届本科生毕业论文目录(1991-1995)1991级曹春晖Cao Chunhui:Die subjektive Aussageweise DeutscherModalverben --Überblick undÜbersetzungsmöglichkeit 德语情态动词主观用法及其翻译葛艳Ge Yan:Negation durch Wortbildung 通过构词手段的否定用法郭北方Guo Beifang:Untersuchungen zum Ge brauch des Verbs …lassen”und seiner Übersetzungsmöglichkeiten 试探动“lassen”的用法及其翻译可能性蒋鸣健Jiang Mingjiang:Der Nominalgebrauch in der Fachsprache 科技语言中的名词用法李东Li Dong:Stellungsregeln von …nicht” bei der Satz- undSondernegation. --Analyse typischer Fehler vonGermanistikstudenten.“nicht”在否定全句和某个句子成分时的位置及中国学生在这方面的典型错误分析李邵永Li Shaoyong:Die Farbbezeichnungen im Deutschen undChinesischen - ein Vergleich 中德颜色词用法比较钱王君Qian Jun:Deutsche Modalpartikeln als Lernproblem fürchinesische Deutschlerner 情态小品词-德语学习中的难题王薇Wang Wei:Vergleich der Verwendung der Redensarten undSprichwörter in deutschen und chinesischenWerbeanzeigen 成语及谚语在中德广告中应用的探讨吴晔Wu Ye:Wortbildung des Adjektives in der Werbung 广告中的形容词构词法包汉毅Bao Hanyi:Vergleich von sieben Übersetzungen des Romans …Die Leiden des jungen Werthers”《少年维特的烦恼》七种汉译本的比较蔡潇飞Cai Xiaofei:Räuber oder Held? - Eine Personenanalyse desDramas von Schiller “Die Räuber”强盗还是英雄?——席勒《强盗》一剧中的人物分析戈威Ge Wei:…Immensee“ im Vergleich mit dem chinesischenR oman …Familie” 《茵梦湖》与中国小说《家》的比较孙彦Sun Yan:Vergleich von 2 chin. und deutschenLiebestragödien 两篇中德爱情悲剧的比较吴燕芸Wu yanyun:Die preisgekrönten chinesischen Filme auf deninternationalen Filmfestspielen Berlin 柏林电影节上获奖的中国电影赵传书Zhao Chuanshu:Allgemeine Untersuchung der Ellipsen mitFallbeispielen unter besonderer Berücksichtigung des Gebrauchs in literarischen Werken 浅析文学作品中的省略冯蕾Feng Lei:Eine empirische Studie über das Studienangebot an der Deutschen Fakultät der Tongji-Universität und die Berufsperspektive der Absolventen 同济大学德语系课程设置及毕业生择业前景剖析黄凯Huang Kai:Anwendung des Computers beim Lehren undLernen 计算机在教学中的应用张大雁Zhang Dayan:Funktion des literarischen Textes imAnfangslehrbuch DaF 试探文学作品在德语初级教材中的作用杨解朴Yang Xiepu:Die gegenwärtige Lage und die Perspektiven derchinesisch-deutschen Wirtschafts- undHandelsbeziehungen 中德经贸关系的现状及前景王蓉Wang Rong:Vergleich der Darstellung in deutschen undchinesischen Zeitungen am 8. Mai -- 50 Jahre nach dem Ende des zweiten Weltkriegs二战结束50周年纪念日——5月8日中德报纸有关报道比较1992 级董敏Dong Min:Analyse literarischer Übersetzungsversuche vonchinesischen Studenten im Vergleich mit derdeutschen Endfassung anhand von Beispielen ausder Erzählung “Rouge” des zeitgenössi-schenAutors Su Tong 以翻译苏童的小说《红粉》为例,对中国学生的翻译尝试与德语的最后译稿的比较分析傅雪君Fu Xuejun:Der Einfluß von Nietzsches Philosophie auf dieWerke Lu Xuns mit dem Schwerpunkt auf der“Umwertung aller Werte”尼采的哲学对鲁迅创作思想,以“重估一切价值”为重点高乃勤Gao Naiqin:Die Darstellung der Stadt Shanghai in deutschenund chinesischen Reiseführern 中德旅游手册对上海的描述比较分析华晓琳Hua Xiaolin:Wortspiele in deutschsprachigen Witzen 德语笑话中的双关语靳简Jin Jian:Untersuchung zu Überschriften der deutschenjournalistischen Wirtschaftstexte 德语报刊文章标题初探康宁Kang Ning:Der Einfluß der Kinderlieder auf dieKindererziehung in China und Deutschland 儿歌对中德儿童教育的影响罗震川Luo Zhenchuan:Kontrastiver Vergleich der Vergleichsformen inder deutschen. und chinesischen Sprache 中德升级的对比研究汪瑛Wang Ying:Vergleich der chinesischen und deutschenBewerbungsbriefe und Lebensläufe 中德求职信和履历表的比较乌兰Wulan:Vergleichende Untersuchung derHöflichkeitsformen in den chinesischen unddeutschen Geschäftsbriefen中德商务函件中礼貌用语的比较徐颍Xu Ying:Die Anwendung der Computer-Lernprogrammeam Beispiel “Syntax” 计算机学习软件的应用-以“句法”软件为例杨立光Yang Liguang:Allgemeine Untersuchung der Visualisierung imLehrwerk “Standpunkte” 教材“立场”中图画研究殷旻Yin Min:Kontrastive Untersuchung des Gebrauchs vonRedensarten und Sprichwörtern in Schlagzeilendeutscher und chinesischen Zeitungsartikel中德报刊文章标题中使用成语及谚语的对比研究张建欣Zhang Jianxin:Die bewertende Ausdrucksweise in Gutachtendeutscher Lektoren über Abschlußarbeitenchinesischer Germanisten 德国教师关于中国德语专业学生毕业论文中的评价表达方式周家伦Zhou Jialun:Die deutsche Architektur in Qingdao 青岛的德国建筑1993 级卜元石Bu Yuanshi:Kontrastive Untersuchung der Stilmerkmalechinesischer und deutscher Gesetze und derenÜbersetzungsproblematik 汉德法律文体的比较及翻译蔡侃寅Cai Kanyin:Schreiben mit dem Computer -Textverarbeitungsprogramme am Beispiel “Word 6” 用电脑写作——以“Wort 6,0”为例丁雍容Ding Yongrong:China aus deutscher Sicht 德国人看中国郭秀娥Guo Xiu´e:zu den Problemen in deutsch-chinesischenÜbersetzungen von Studenten -- Fehleranalyse und Vermeidungsmethoden 学生德汉翻译中的问题——错误分析及其避免措施黄叶红Huang Yehong:Satzglieder und Stellungsregeln im Deutschen und chinesischen -- Kontrastive Untersuchung unterdem Gesichtspunkt Verbvalenz 汉德句子成分和语序对比——从动词配价入手蒋春耘Jiang Chunyun:Die Funktion der Landschaftsschilderung in derNovelle “Immensee” 景物描写在小说《茵梦湖》中的作用金巧英Jin Qiaoying:Problematik der Äquivalenz bei der chinesischen - deutschen Übersetzung 汉德翻译中的等值问题李敏Li Min:Vergleich deutscher und chinesischer Ansprachen 汉德祝词比较蔺佳蓉Lin Jiarong:Erwerb der muttersprachlichen Lese- undSchreibfertigkeit -- Kontrastiver Vergleich vonchinesischen und deutschen Lehrmaterialien fürdie Elementarstufe 母语阅读和写作技能的习得——中德小学语文教材对比凌小鹏Ling Xiaopeng:Lexikalische und syntaktische Merkmale dermathematischen Fachsprache 数学专业语言的语法和词汇特点毛静轶Mao Jingyi:Deutsche und chinesische Mahnungen - EinVergleich德汉催款信比较钱惠民Qian Huimin:Vergleich der Traueranzeigen in chinesischen und deutschen Zeitungen 中德报刊讣告比较施重凌Shi Chongling:Gebrauch und Übersetzungsvorschläge derdeutschen Abtönungspartikel “doch” 德语情态小品词“doch”的用法及翻译可能性施平平Shi Pingping:Vergleich des Managements von japanischen und westlichen Unternehmen 日本和西方企业管理制度的比较唐丽嘉Tang Lijia:Darstellung und Vergleich derSozialversicherungssysteme in Deutschland China 中德社会保险制度比较田昱沁Tian Yuqin:Textsortenvergleich von jixuwen im Chinesischen und Bericht und Erzählung im Deutschen. 汉语中的记叙文和德语中的报道性和叙述性语篇类型的比较王澄涯Wang Chengya:Chinesische Übersetzungsmöglichkeiten deutscher Firmennamen 德国在华企业公司译名法王悦蓉Wang Yurong:Wie drückt man Glückwünsche im Deutschenschriftlich aus? -- Aufbau und Inhalt vonGratulationsschreiben 如何用德语表达祝愿?——祝贺信的结构和内容吴伟Wu Wei:Studium in Deutschland 留学德国武亚平Wu Yaping:Die Übersetzungsmethoden und die Möglichkeiten für die chinesische Speisennamen 浅谈中国菜单的翻译玄嵘Xuan Rong:Die häufigen Kompositionstypen in denFachsprachen der Metalltechnik 金属工艺学中常用的复合词类型严萍Yan Ping:Eine Vergleichsuntersuchung der deutschenTempusformen 德语过去时和现在时时态比较余晰磊Yu Xilei:Der Wetterbericht als Fachtext -- eineVergleichende Untersuchung von schriftlichen und mündlichen Wetterberichten 天气预报作为专业语篇——书面和口头天气预报的比较研究张震浩Zhang Zhenhao:Sportberichte in den deutschen Zeitungen 德语报刊中的体育报道赵宇Zhao Yu:Die Stellung und Auswirkung Deutschlands inEuropa nach Wiedervereinigung 统一后的德国在欧洲的地位和影响朱浩毅Zhu Haoyi:Den Rhein zum Vorbild nehmen - Die praktischen Erfahrungen auf dem Gebiet der Wasserreinigung beim Rhein geben China viele Anregungen 以莱茵河为榜样——莱茵河环抱给中国的启示朱宇芳Zhu Yufang:Ein kontrastiver Vergleich vom chinesischenyilunwen und der deutschen Erörterung 汉德议论文比较庄怡文Zhuang Yiwen:Rhetorische Figuren in den Schlagzeilen deutscher Werbeanzeigen - am Beispiel derAutomobilwerbung 德语广告标题中的修辞格——以汽车广告为例1994 级包燕Bao Yan:Das Wortspiel in den deutschen Werbeanzeigen.德语广告中的双关语程咏Cheng Yong:Die Entwicklung der deutschen Technik - amBeispiel des Automobils 从德国汽车史看德国科技发展成震Cheng Zhen:Untersuchung der Form und sprachlichenMerkmale der deutschen Handelskorrespondenz.浅析德语商务函电的格式和语言特征陈晓荣Chen Xiaorong:Ein Vergleich zwischen dem chinesischen unddem deutschen Zungenbrecher.中国和德国绕口令比较陈晓莺/ 颜岭Chen Xiaoying/ Yan Ling:Courseware um multimedialesDeutschlernprogramm “Ankunft in Deutschland”.多媒体德语学习软件“初到德国”课件部分陈音Chen Yin:Untersuchung zu einem Wortbildungstyp --Substantiv-Partizip I/II-Komposita. 对于复合分词构词类型的研究。
Elektrische Systeme im Kraftfahrzeug汽车电子系统Fachsprachslesebuch für den Studiengang Fahrzeugelektronik 汽车电子方向专业德语讲义Fakultät für Fahrzeugtechnik, Tongji Universität同济大学汽车学院Hrsg. Zaimin Zhong授课教师:钟再敏Auflage 2010InhaltI Grundlagen der Fahrzeugeletrotechnik (2)I-a Grundlagen der Elektrotechnik - Elektrischer Strom (2)I-b Bussysteme, Vernetzungen, verteilte Systeme (6)II Antriebssysteme (8)II-a Motormanagement - Funktionen (8)II-b Getriebesteuerung - Funktionen und Software (14)II-c Motor-Getriebe-Schnittstelle für Mehr Vergleichbarkeit und Transparenz (21)III Hybridfahrzeugtechink (26)III-a Der neue Touareg Hybrid (26)III-b Jetzt auch noch Hybridantriebe bei Flurförderzeugen? (32)IV Chassis (40)IV-a Elektronisches Bremssystem für Straßenfahrzeuge (40)IV-b Elektrisch lenken Notwendige Effizienzsteigerurigen im Oberklassesegment (41)IV-c Karosserieelektronik und Infotainment (45)I Grundlagen der FahrzeugeletrotechnikI-a Grundlagen der Elektrotechnik - Elektrischer StromZunächst ist unter dem Begriff elektrischer Strom nichts Konkretes vorstellbar. Allerdings kann er fast überall an seinen Wirkungen erkannt werden. So ist bekannt, daß in einer Leitung oder in einem elektrischen Gerät Strom fließt - erkennbar beispielsweise am Aufleuchten der Ladekontrollampe oder der Fahrscheinwerfer. Der Starter erhält Strom von der Batterie, dreht sich und läßt den Motor anspringen, oder der elektrische Zigarettenanzünder wird benutzt, indem dessen Heizspirale vom 10Batteriestrom zum Glühen gebracht wird. Jeder Autofahrer weiß, daßdie Sicherung durchbrennt, wenn ein Kurzschlußin einer Leitung auftritt. Die Fahrzeugbatterie mußaufgeladen werden: Das besorgt der Ladestrom des Generators; und die Zeiten der von Hand betätigten Hupe sind längst vorüber: ein elektrisches Signalhorn ist an ihre Stelle getreten.Alle diese und viele andere Anwendungen des elektrischen Stroms und seiner Messung finden ihren Ursprung in seinen Wirkungen. Diese sind:□das Magnetfeld, das einen stromdurchflossenen Leiter umgibt,□die Erwärmung, die ein stromdurchflossener Leiter erfährt,□die elektrochemische Wirkung und□die elektrische Leitfähigkeit der Gase.1 Nachweis des Magnetfeldes20Wird eine Kompaßnadel in die Nähe der Pole eines Hufeisenmagneten gebracht, so wird sie von ihrer ursprünglichen Richtung abgelenkt. Das Magnetfeld, das den Hufeisenmagneten umgibt, übt also eine Kraft auf die Kompaßnadel aus.In der Nähe eines stromdurchflossenen geraden Leiters, beispielsweise eines Kupferstabs, wird die Kompaßnadel ebenfalls abgelenkt und gezwungen, sich stets quer zum Leiter einzustellen. Die Schlußfolgerung: Ein stromdurchflossener Leiter ist ebenfalls von einem Magnetfeld umgeben (Bild1.1), das Kräfte auf die Kompaßnadel ausübt.d durch Aneinanderreihen von vielen Windungen eines Drahtes eine Spule gebildet, so ist an derAblenkung der Kompassnadel zu erkennen, daßauch die stromdurchflossene Spule von einem 30Magnetfeld umgeben ist.Wird ein Kupferstab trapezförmig so aufgehängt, daßer zwischen den Polen eines Hufeisenmagneten schwingen kann (Bild 1.2) und dabei von Strom durchflössen, sotreibt ihn eine ablenkende Kraft aus seiner Ruhelage heraus. Wird eine Spule zwischen den Polen eines Magneten drehbar angebracht, so wird sie in dem Augenblick, in dem sie vom Strom durchflössen wird, aus ihrer Ruhelage herausgedreht, bis sich ihre Windungsebene senkrecht zur Verbindungslinie der Pole einstellt (Bild 1.3). Daraus leitet sich ab, daß zwischen dem Magnetfeld des Magneten einerseits und dem des stromdurchflossenen Kupferstabs bzw. der Spule andererseits Kräfte wirken, die die Lage der beweglichen Teile verändern.40Bild 1.l Stromdurchflossener gerader Leiter mit abgelenkter Kompaßnadel (Robert Bosch GmbH)Bild 1.2 Stromdurchflossener gerader Leiter im permanenten Magnetfeld (Robert Bosch GmbH) Bekannt ist, daß sich um eine stromdurchflossene Spule ein Magnetfeld ausbildet. Wird n un der Magnet selbst ebenfalls durch eine Spule und deren Magnetfeld ersetzt, kann mit dieser feststehenden Spule eine andere, bewegliche Spule in Drehung versetzt werden, wenn durch beide Strom geleitet wird. Die bewegliche Spule wird durch die Wechselwir kung der Magnetfeldkräftebeider Spulen gedreht (Bild 1.4),bis sich die Windungen der beweglichen Spulezu denjenigen der dengestellt haben wie ein Stück weiches Eisen von den Polen des Hufeisenmagneten zogen wird, wird es auch voMagnetfeld einer stromdurchflossenen Spule ange (Bild 15) Diese Wirkung eines stdurchflssenen Leiters oder 10einer Spule wird i Gegensatz u den magnetischen Wirkungen eines eisenmagneten Dauer- oder Permanentmagneten) elektromagnetische Wirkung genant.Auf ihr beruhen die Wirkungsweisen der meisten elektrischen Geräte im Kraftfahrzeug, wie beispielsweise des Generator des Reglers, des Starer derelektromagnetchnSchalterusw.Bild 1.3 Stromdurchflossene Spule im permanenten Magnetfeld ( Roben Bosch GmbH )Bild 1.4 Kräftewirkung zwischen stromdurchflossener fester Spule und drehbarer Spule ( Robert Bosch GmbH )Bild 1.5 Eisenkern wird von stromdurchflossener Spule angezogen ( Robert Bosch GmbH )2 Nachweis der ErwärmungEine weitere irkung des elektrischen Stroms ist die Erwärmung des Leiters, die bis zum Glühengesteigert werden kann. Dabei dehnt sich der Leiter aus, was an einem dünnen Kupferdrahtbeobachtet werden kann Bild 1.6), der in der Mitte durch ein Gewicht beastet ist. Bei den Glühlampen der Scheinwerfer werden die kleinen Wendel durch den Strom bis zur Weißglut erhitzt,bei einem Zigarettenanzünder dagegen genügt schon helle10Rotglut.Bild 1.6 Ausdehnung eines erwärmten Stromleiters ( Robert Bosch GmbH )3 Nachweis der elektrochemischen Wirkungen des StromsElektrochemische Wirkungen des Stroms treten bei Stromdurchgang durch leitende Flüssigkeiten, sogenannte Elektrolyte, auf. Werden in ein Glas Wasser, in dem einige Tropfen Schwefelsaure gelöst wurden, zwei Metallplatten als Sromzuführungen, sogenannte Elektroden, get aucht (Bild 1.7), so steigen bei Stromdurchgang durch das Wasser an den Platten Gasbläschen auf, die sich als Sauerstoff- und Wasserstoffgas nachweisen lassen. Das Wasser ( wird elektrolytisch in seine Bestandteile zerlegt.Fließt Strom durch ein elektrolytisches Silberbad, so scheidet sich an einer der beiden Elektroden 20Silber ab. In diesem Fall besteht also die elektrochemische Wirkung des Stroms in der Ausscheidung eines Metalls. Die Wirkungsweise der Bleibatterie berh wahrend des Ladevorgangs ebenfalls a uf der elektrochemischen Wirkung des Stroms. Die so in der Fahrzeugbatterie aufgespeicherte elektrochemische Energie wird während der Entladung in elektrische Energie umgeformt und an dieVerbraucher abgegeben.Bild 1.7: Elektrolyse des Wassers ( Robert Bosch GmbH )4 Nachweis der elektrischen Leitfähigkeit von GasenNeben Metallen und Flüssigkeiten, den Elektrolyten, können auch Gase den elektrischen Strom leiten.Beim Durchgang des Stroms durch ein mit verdünntem Edelgas, beispielsweise Neon oder Helium, gefülltes Glasrohr entsteht ein starkes Leuchten in dessen Inneren. Von den leuchtenden 30Lichtreklamen her ist diese Erscheinung bekannt. Die Schlußfolgerung daraus ist, da die einzelnen Gasteilchen durch den Stromflußim Glasrohr eine Veränderung erfahren. Ein Funkenüberschlagzwischen zwei Platten oder Spitzen, den Elektroden, ist ebenfalls nichts anderes als ein Stromdurchgang durch die Luft oder durch ein Gasgemisch. Als Beispiel dafür sei der Funkenüberschlag an den Kerzenelektroden einer Zündkerze genannt, durch den das Luft-Kraftstoff-Gemisch im Brennraum des Motors entzündet wird., ISBN 10:3802314964/3-8023-1496-4/ISBN 13: 9783802314964, Verlag: Vogel, Erscheinungsdatum: 1995)I-b Bussysteme, Vernetzungen, verteilte SystemeGrundlagen der Datenkommunikation1 Einführung in die DatenkommunikationMit der Einführung elektronischer Steuergeräte im Kraftfahrzeug können Funktionen realisiert werden, die mit mechanischen, hydraulischen oder elektrischen Komponenten entweder gar nicht oder nur aufwändig und damit teuer umsetzbar sind. Die Realisierung von Funktionen zur Reduzierung des Kraftstoffverbrauchs und der Schadstoffemissionen sowie zur Erhöhung der Sicherheit und des Fahrkomforts stellen hohe Anforderungen an 10die technische Kompetenz der Fahrzeugentwickler und ihrer Zulieferer. In den 70er Jahren hatte jede elektrische oder elektronische Komponente eine explizit zugewiesene Funktion, und die Komponenten arbeiteten unabhängig voneinander. Steigende Komplexität der Funktionen machte schließlich den Einsatz softwarebasierter Steuergeräte (Electronic Control Unit ECU) und schließlich den Austausch von Daten (Datenkommunikation) zwischen den Steuergeräten erforderlich. Heute werden viele Funktionen nicht mehr von einem einzelnen Steuergerät realisiert, sondern sind auf mehrere Steuergeräte verteilt. Man spricht von verteilen Funktionen, verteilten Regelungen und verteilten Systemen (siehe Bild4-16).Bild 4-16: Datenkommunikation: a) Vernetzung von Steuergeräten, b) verteilte Funktionen (ECU: Steuergerät)20Beispielsweise kommuniziert das Getriebesteuergerät mit dem Motorsteuergerät, um durch Verstellen des Zündzeitpunktes den Komfort beim Schalten zu verbessern oder das Steuergerät für die Antriebsschlupfregelung mit dem MotorsteuergerätSchlupf der Antriebsräder das Drehmoment zu reduzieren. Die Klimaanlage benötigt die Motortemperatur, die Innenraumtemperatur und die Außentemperatur, um den Innenraum des Fahrzeugs entsprechend dem Fahrerwunsch zu klimatisieren. Zudem werden die Temperaturen dem Fahrer angezeigt. Das ACCSteuergerät (Adaptive Cruise Control) kommuniziert mit Motor- und Getriebe-Steuergerät und i Bedarfsfall auch mit dem Bremsregelungs-Steuergerät, um den jeweils erforderlichen Sicherheitsabstand zum vorausfahrenden Fahrzeug zu regeln.Nicht nur die Umsetzbarkeit verteilter Funktionen spricht für die Datenkommunikation. Viele Informationen (z.B. Fahrzeuggeschwindigkeit, Drehzahlen Temperaturen) werden als Eingangsgrößen nicht nur für eine, 30sondern für mehrere Funktionen, also auch von mehreren Steuergeräten benötigt. Durch Datenkommunikation zwischen den Steuergeräten müssen diese Informationen nur einmal berechnet oder erfasst werden, so dass Sensoren und Rechenleistung eingespart werden können. Zum Beispiel wird die vom ABS-Steuergerät aus den Signalen der Raddrehzahlsensoren ermittelte Geschwindigkeit des Fahrzeugs vom Kombi-Instrument zur Anzeige gebracht, aber auch vom Navigationssystem, dem Motorsteuergerät, dem Getriebesteuergerät, der Geschwindigkeitregelung und vom Radio (zum Einstellen der geschwindigkeitsabhängigen Lautstärke) benötigt.Für die Datenkommunikation müssen die Steuergeräte physikalisch miteinander verbunden werden. Die Verbindung zwischen den Steuergeräten im Fahrzeug wird als Vernetzung bezeichnet. Dabei wird zwischen Netzwerken mit paralleler und serieller Datenkommunikation unterschieden.Vereinfacht dargestellt, wird bei paralleler Datenkommunikation für jedes Bit einer Nachricht eine Übertragungsleitung benötigt, während die 40Daten bei serieller Datenkommunikation über eine einzelne Leitung hintereinander übertragen werden. Serielle Netzwerke benötigen also weniger Übertragungsleitungen als parallele Netzwerke. Dadurch kann auch die Anzahl der Steckverbinderkontakte reduziert werden. Nur mit seriellen Netzwerken ist die Beherrschung der mit dem zunehmenden Einsatz elektronischer Steuergeräte verbundenen Komplexität der Kabelbäume möglich.Im Folgenden werden ausschließlich Netzwerke mit digitaler, serieller Datenkommunikation behandelt.Netzwerke mit digitaler, serieller Datenkommunikation erlauben die Mehrfachnutzung von Informationen (Daten), reduzieren die Anzahl von Sensoren Steckverbindern und elektrischen Leitungen, ermöglichen Diagnose und erhöhen durch Redundanz die Ausfallsicherheit.Kommunikationspartner,Bei der Kommunikation des Fahrzeugs mit externen Kommunikationspartnern kommen spezielle Protokolle Neben einer Vielzahl fahrzeugherstellerspezifischer (proprietärer) Protokolle finden heute zunehmend standardisierte Protokolle Anwendung. Historisch bedingt werden diese Protokolle auch als Diagnoseprotokolle bezeichnet, obwohl sie heute Anwendungen ermöglichen, die weit über die klassische Diagnose hinausgehen. Beispiele für standardisierte Diagnoseprotokolle sind ISO15031 (Communication 10between vehicle and external equipment for emissionrelated diagnostics), ISO14230 (Diagnostic systems), ISO 15765Diagnostics on Controller Area Networks ISO14229-1 (Unified diagnostic services Beispiel für externe Kommunikationspartner, die mit dem Fahrzeug über ein Diagnoseprotokoll kommunikazieren, sind OBD-Scantools zur Kommunikation mit dem OBD-System, Prüfstandsrechner im Rahmen der Funktionsentwicklung mit HIL, Rollenprüfstände, elektronische Checkout-Systeme in der Fahrzeugproducktion (ECOS), Flashtools und Servicetester in der Werkstatt.Nach de bisherigen Ausführungen müssen Fahrzeug-Steuergeräte neben der Steuerung oder Regelung vonProessen durch die Verarbeitung von Eingangsinformationen zu Ausgangsinformationen zusätzlich mit anderen Steuergeräten kommunizieren und die Kommunikation mit externen Kommunikationspartnern über ein diagnoseprotokoll gewährleisten.Die Kommunikation der Steuergeräte untereinander wird als 20in-vehicle-communication (GMLAN), normal communication (SAE J1850) oder als Onboard-II AntriebssystemeII-a Motormanagement - Funktionen1 Übersicht MotorsteuerungsfunktionenDiSteuerungs- und Regelungsaufgaben im Kraftfahrzeug lassen sich anlog zur physikalischen Organisationsstruktur des Gesamtsystems Fahrzeug in Funktionspakete gliedern, die jeweils die Algorithmen zur Lösung der einzelnen Aufgabenstellung umfassen, Bild 2-3. Die Funktionen basieren auf dem physikalischen Zusammenhang zwischen einer Zustandsgröße und der zugehörigen 10Stellgröße und lassen sich als Modell eines dynamischen Systemsbeschreiben.Bild 2-3:Hierarchische Strukturierung der Steuerungssystem (ECU Steuergerät)Ein Beispiel dafür ist die Bestimmung der Drosselklappen-Sollwertposition mit dem Saugrohrmodell. Bild2-4erfahren basiert darauf, dass jeder Stellung sselklappe bei einem gegebenem Saugrohreiner definierten Drehzahl ein mathemabeschreibbarer Luftmassenstrom entspricht und umgekehrt, denn das mathematische Modell des Zusammenhangs ist invertierbar. Da jeder definierte Luftmassenstrom wiederum einer bestimmten Zylinderfrischgasfüllung entspricht, eignet sich mathematische Beschreibung dazu, das physikalische Verhalten des Zusammenhangs zwischen Drosselklappenstellung und erwünschter 20Frischgasfüllung zu beschreiben. Sensorsignale werden in diesem Fall oft nur noch zum Abgleich mit den Sollwerten genutzt, die das Modell errechnet. Eine dabei eventuell erkannte Abweichung zwischen Modell und Messwerten z.B. beim Saugrohrdruck, der Abgastemperatur und beim Abgasgegendruck) geht in die Modelladaption und in die Systemdiagnose ein. Um die Nachbildungsgenauigkeit der Modelle zu steigern, zur mathematischen Modellierung sowohl die theoretische als auch die experimentelle Systemanalyse verwendet.Die theoretische Systemanalyse als analytischer Ansatz auf Basis bekannter physikalischer chemischer und anderer Gesetzmäßigkeiten beschreibt die Zusammenhänge innerhalb des Systems. Die experimentelle Systemanalyse ist dagegen der empirische Ansatz auf Basis von Versuchsreihen. Auf der Grundlage der Beobachtungen im Versuch wird das Systemverhalten hier mit Kennfeldern nachgebildet. Ein typisches Beispiel ist der Luftmassenstrom als Funktion von Drehzahl und Saugrohrdruck.Bild 2-4: Modell des Saugrohrs (ohne Abgasrückführung): p im Saugrohrdruck, T im Gastemperatur im Saugrohr, V im Saugrohrvolumen,thr m • Massenstrom über die Drosselklappe, cyl m •über die Einlassventile ,387/()g R J kgK ≈ Gaskonstante für Luft 2 Drehmomentbasierte FunktionsstrukturBei einer drehmomentbasierten Funktionsstruktur werden alle Motorsteuer- und Regelanforderungen, die sich als Drehmoment oder Wirkungsgrad darstellen lassen, auch tatsächlich als physikalische Drehmomentanforderung definiert. In Kombination mit einem E-Gas-System erlaubt diese Funktionsstruktur im Ottomotor eine vom Fahrer entkoppelte 分离】Steuerung der Frischgasfüllung. Dadurch ist es möglich, den Fahrkomfort zu erhöhen und gleichzeitig eine optimale Balance zwischen Fahrbarkeit 【操控性】, Verbrauch und 10 Emissionen zu erreichen. Den Ausgangspunkt bildet die Stellung des Gaspedals 【油门】, die als Geber zur Berechnung einer Drehmomentanforderung (Soll-Moment) dient. Dieses Moment versucht die Motorsteuerung entweder auf einem Pfad (Ottomotor mit Schichtladung. Dieselmotor) oder auf zwei Pfaden (Ottomotor mit homogener Ladung einzustellen 调整.Zu den Einstellgrößen des schnellen Pfades arbeitsspielsynchrone Momentenbeeinflussung 【周期同步力矩的影响】) zählen Zündzeitpunkt, Einspritzmenge (in den Zylinder) und die Zylinderabschaltung. Die Zündverstellung【点火提前】 dient beim Ottomotor dazu, Effekte der Füllungsregelung 【充电控制的影响】soweit erforderlich zu kompensieren 【均衡】.Als langsamer Pfad gelten Eingriffe in die Frischgasfüllung (Füllungssteuerung durch die Drosselklappe, bei einigen Systemkonfigurationen auch durch Phasensteller der Nockenwelle) beim Ottomotor mit homogener Verbrennung. Beim Dieselmotor und beim Ottomotor mit Schichtladung erfolgt die 20 Momentensteuerung ausschließlich über die Einspritzmenge. Da Lastanforderungen über eine Erhöhung der Einspritzmenge arbeitsspielsynchron umgesetzt werden können, umfasst die Funktionsstruktur hier keinen langsamen Pfad zur Momentensteuerung.Im Ottomotor mit Homogenbetrieb ergibt sich durch diese Aufteilung auf zwei Einstellpfade die Möglichkeit, eine Momentenreserve aufzubauen. Unter Momentenreserve versteht man in diesem Zusammenhang eine kupplungsmomentenneutrale Füllungserhöhung bei gleichzeitiger Verstellung des Zündwinkels in Richtung spät. Der schlechtere Wirkungsgrad führt zu einer höheren Abgastemperatur, die für Heizmaßnahmen von Komponenten (Katalysator 催化剂、尾气处理器, NO x -Speicherkatalysator) im Abgasstrang genutzt werden kann. Gleichzeitig bietet sich die Möglichkeit, durch eine plötzliche Zündwinkelverstellung in Richtun g früh aktiv auf diese Momentenreserve zuzugreifen und sie für eine arbeitsspielsynchrone Anhebung 30des Kupplungsmomentes zu nutzen. Diese schnelle Eingriffsmöglichkeit wird beispielsweise für die Leerlaufregelung und in den Fahrbarkeitsfunktionen genutzt. 3 DrehmomentenmodellEine Grundeigenschaft der drehmomentbasierten Funktionsstruktur ist die Interpret ation des Fahrerwunsches (ausgehend von der Gaspedalposition) und weiterer Anforderungen (z.B. Tempomat, ESP, ASR) als physikalische Anforderung eines Drehmoments an der Kupplung. Hauptaufgabe des Drehmomentenmodells ist es, diesen Wunsch des Fahrers nach einem konkreten Kupplungsdrehmoment unter Berücksichtigung der aktuellenMotorbetriebsbedingungen durch passende Sollwertvorgaben an die momentenbeeinflussenden Aktoren umzusetzen. Dieser Teil des Modells wird wegen der mathematischen Rechenrichtung vom Fahrerwunsch zum Aktor als 40Rückwärtspfad bezeichnet. Die zweite Aufgabe des Drehmomentenmodells besteht darin, basierend auf den aktuellen Positionen der momentenbeeinflussenden Aktoren sowie weiterer Betriebsgrößen des Motors ein aktuelles Drehmoment zu schätzen. Wegen der mathematischen Rechenrichtung vom Aktor zum Drehmoment spricht man hier vom Vorwärtspfad. Dieser Modellwert wird in verschiedenen internen und externen Funktionen (z.B. Getriebesteuerung) verwen det (Bild 2-5).Bild 2-5: Rückwärts-und Vorwärtspfad des Drehmomentenmodells (vereinfacht)Bild 2-6: Grundansatz Vorwärtspfad des Drehmomentenmodells10Der Vorwärtspfad (also die Abschätzung des aktuellen Drehmoments an der Kupplung) setzt sich aus den Teilmodellen für das Verlustmoment und für das indizierte Moment aus der Hochdruckphase zusammen (Bild2-6). Das Verlustmoment beinhaltet hierbei die Verluste aus dem Ladungswechsel, der motorischen Reibung (mit den Hauptabhängigkeiten Motordrehzahl, Gesamtgasmassenstrom zum Zylinder incl. Restgas, Kühlwassertemperatur und Öltemperatur) sowie der Nebenaggregate辅助设备(z.B. Klimakompressor, Generator). Das indizierte Drehmoment ergibt sich als Produkt aus einem optimalen Moment (Kennfeldwert abhängig von Drehzahl und Füllung oder Einspritzmenge) und den Wirkungsgradkorrekturen (z.B. Zündzeitpunkt, relatives Luft-Kraftstoffverhältnis, Zylinderausblendung, Restgasgehalt, Nockenwellenstellung, Einspritzaufteilung). Das optimale Drehmoment repräsentiert hierbei einen Drehmomentwert, der sich bei der aktuellen Dr ehzahl und 20bei gegebener Frischgasfüllung bzw. Einspritzmenge einstellen würde, wenn alle anderen momentenbeeinflussenden Stellgrößen einen Optimalwert annehmen würden. Die Wirkungsgradkorrekturen beschreiben den relativen Wirkungsgradabfall, der sich bei einer Optimalwert-Abweichung der betreffenden Stellgrößen einstellt. Diese Optimalwert-Abweichungen resultieren zum Teil aus physikalischen Limitierungen (etwa die Klopfgrenze für Zündwinkelfrühstellung)oder aus gewollten Eingriffen (Zündwinkelspätverstell ung bei angeforderter Momentenreserve).Im Rückwärtspfad des Drehmomentenmodells erfolgt die Berechnung von Sollwerten für die im jeweiligen Betriebesmodus zur Verfügung stehenden momentenbeeinflussenden Stellgrößen. Unter Berücksichtigung der aktuellen Momentenverluste werden die Drehmomenten-Sollwerte zuvor auf 30Sollwerte für ein indiziertes Motormoment umgerechnet.Bei einem Ottomotor im Homogenbetrieb erfolgt die Sollwertberechnung für die Momentenrealisierung getrennt auf einem langsamen Pfad (Sollwert Frischgasfüllung) einem schnellen Pfad (Zündwinkel-Sollwert). Eine Momentenreserve wird realisiert, indem der Drehmomenten-Sollwert für den langsamen mit einer additiven Korrektur angehoben wird.Sollwertberechnung für die Frischgasfüllung erfolgt mit Hilfe eines invertierten Referenzmomentenkennfeldes 2-7).Bild 2-7: Sollwertberechnung für den langsamen Pfad (Frischgasfüllung)Die Sollwertberechnung für den Zündwinkel erfolgt über den Sollwert des Zündwinkelwirkungsgrads als Zwischengröße. Dazu wird der Quotient aus Drehmomenten-Sollwert und dem aktuellem Basismoment (aktuelles Referenzmoment mit Wirkungsgradkorrekturen für Luft-Kraftstoff-Verhältnis, Restgasgehalt und Zylinderausblendung气缸抑制) gebildet. Der Sollwert für den Zündwinkelwirkungsgrad wird in einem Kennfeld mit invertie rtem Zündwinkel 10wirkungsgradverlauf in einen Sollwert für die Zündwinkelspätverstellung umgerechnet, welcher dann über eine Addition zum Referenzzündwinkel zu einem Zündwinkel-Sollwert führt-8).Bild 2-8: Sollwertberechnung für den schnellen Pfad (Zündwinkel)Bei einem Ottomotor im geschichteten Betrieb und einem Dieselmotor erfolgt die Realisierung des Drehmomentenwunsches nur über den schnellen Pfad. Hierbei wird der Sollwert für das indizierte Motormoment bei gegebener Motordrehzahl und unter Berücksichtigung etwaiger可能的Wirkungsgradkorrekturen (Luft-Kraftstoff-Verhältnis Phasing, Restgasgehalt) direkt in einen Sollwert für die Einspritzmenge umgerechnet. Die Sollwertpositonen der anderen Aktoren leiten sich 20aus dem Einspritzmengen-Sollwert ab.4 Füllungssteuerung4.1 Saugrohrmodell【进气歧管】gasfüllung ist die Haupteinflussgröße auf ment des Ottomotors im stöchiometrisch Betrieb und Voraussetzung zur Bestierforderlichen Einspritzmenge. Deshalb eine der zentralen Funktionen des Motorstedarin, die Füllungsmenge im Saugrohr und im Zylinder zu erfassen beziehungsweise zu berechnen. Diese Füllungsbestimmung erfolgt mit dem so genannten Saugrohrmodell. Bei der modellbasierten Füllungserfassung des Ottomotors dient die aktuelle Stellung der Drosselklappe im Saugrohr in Relation zur Motordrehzahl dazu, den Luftmassenstrom in das Saugrohr zu berechnen.Als Grundlage dient ein Potentiometersignal电位信号, dessen Höhe der jeweiligen 30Drosselklappenstellung entspricht. Wegen der rechnerischen Richtung spricht man hier vom Vorwärtspfad des Modells. Die in den Zylinder abfließende Luftmasse wird aus einem Kennlinienfeld特征曲线ermittelt. Der Saugrohrdruck ergibt sich aus der allgemeinen Gasgleichung.Auf Messgrößen (gemessene Luftmasse) beruhende Adaptionsverfahren dienen dazu, Modellparameter wie den Umgebungsdruck zukorrigieren.Bild -12: Regelkreis der elektronischen DrosselklappenregelungDa das rechnerische Modell des Saugrohrs invertierbar ist (man spricht im invertierten Fall vom Rückwärtspfad), eignet es sich auch zur Bestimmung der Drosselklappen-Soll-Stellung: Dazu wird 40aus der Drehmomentanforderung rückwärts gerechnet, welche Drosselklappen-Soll-Stellung dem Füllungs-Sollwert für das erwünschte Drehmoment entspricht. Diese Stellung der Drosselklappe wirddurch Ansteuerungdes Stellglieds realisiert. Bild 2-12zeigt die Struktur des Regelkreises. Da die Drehmomentabgabe eines Ottomotors mit homogener Verbrennung direkt und linear von der Füllung abhängt, kann über die Drosselklappenregelung der Momentenwunsch des Fahrers erfüllt werden.Bei aufgeladenen Ottomotoren erfolgt zusätzlich die Berechnung eines für den Füllungs-Sollwert notwendigen Soll-Ladedruckes, der als Führungsgröße in der Ladedruckregelung verwendet wird.Beim Dieselmotor wird die Füllung primär über das Abgasrückruhrventil geregelt. Da kein enges Toleranzfenster um eingehalten werden muss, sind die Anforderungen an die Zumessgenauigkeit etwas geringer, allerdings ist die Komplexität wegen der Vielzahl an Komponenten (Abgasrückführventil, regelbarer Turbolader, ggf. schaltbarer Abgasrückführkühler 10und Bypass des Ladeluftkühlers) ungleich größer. Um künftige Abgasanforderungen zu erfüllen, kommt der exakten Luftzumessung im instationären Betrieb eine sehr wichtige Rolle zu. Deshalb, und um den Bedatungsaufwand für das Steuergerät zu reduzieren, wird auch beim Dieselmotor verstärkt auf modellbasierte Strategien zurückgegriffen. Da für jeden Betriebspunkt Vorgaben im Steuergerät hinterlegt werden müssen und die Kennfelder in der Regel mehrdimensional sind (z.B.Sollwerte, abhängig von Druck und Temperatur), steigt der Zeitaufwand für diese Bedatung (Kalibrierung) mit der Systemkomplexität stark an. Bei Ottomotoren mit Schichtladung sowie bei Diselmotoren ist die Funktion eines Drosselklappenstellglieds erforderlich, um durch Androsseln gezielt Unterdruck im Saugrohr zu erzeugen. Dieser Unterdruck steht dann für den Unterdruckbremskraftverstärker, zur Einspeisung von Blow-by-Gasen aus dem Kurbelgehäuse 20(Verbrennungsgase, die das dynamische Dichtsystem aus Kolbennuten, Kolbenringen und Zylinderlaufbahn passieren und so ins Kurbelgehäuse gelangen), die Regenerierung eines Aktivkohlebehälters für Kraftstoffdämpfe und zum Ansaugen von Abgas im Zuge der Abgasrückführung zur Verfügung. Die Regel- und Stellaufgaben für dieses Androsseln entsprechen im Wesentlichen denen der Füllungssteuerung.5 Zündung【点火】Leistungsfähige elektronische Zündsteuerungssysteme sind Bestandteil eines modernen Motorsteuergeräts. Aktuelle Systeme arbeiten zum großen Teil nach dem Prinzip einer ruhenden Hochspannungsverteilung ohne bewegliche Komponenten (d.h. ohne Verteiler). Aufgabe der Zündsteuerung im Ottomotor ist es, aus externen und internen Zündwinkelanforderungen einen 30koordinierten Sollwert zu bestimmen und die Zündsignale in der richtigen Folge über die Zündendstufen an die Einzelspulenauszugeben.Bild 2-14: Ermittlung des Zündzeitpunkt-Sollwertes im Homogenbetrieb5.1Ermittlung des Sollwerts für den Zündzeitpunkt【确定点火时间设置点】Beim Ottomotor im Homogenbetrieb wird der Sollwert für den Zündwinkel in der drehmomentbasierten Funktionsstruktur bestimmt. Dieser drehmomentbasierte Sollwert wird in der Zündungssteuerung in Richtung früh auf einen Basis-Zündwinkel und in Richtung spät auf einen Minimal-Zündwinkel limitiert (Bild2-14). Der Basis-Zündwinkel ergibt sich aus dem Kennfeldwert 40für den maximalen Wirkungsgrad unter Berücksichtigung der Ansauglufttemperatur, des Luft-Kraftstoffverhältnisses, der Abgasrückführung und der Klopfbegrenzung, der Minimal-Zündwinkel aus den begrenzenden Kennfeldvorgaben für die zulässige Temperatur und die erwünschte Laufruhe. Ein übergeordneter Zustandsautomat (dynamischer Drehmomentmanager) kann in definierten Betriebszuständen drehmomentbasierte Zündwinkeleingriffe deaktivieren und den Basis-Zündwinkel als Sollwert vorgeben. Dadurch ist ein verbrauchsoptimierter Motorbetrieb。