励磁控制系统的仿真
- 格式:doc
- 大小:96.50 KB
- 文档页数:8
MATLABSIMULINK永磁同步电机矢量控制系统仿真一、本文概述随着电机控制技术的快速发展,永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)在工业、交通和能源等领域的应用越来越广泛。
矢量控制作为PMSM的一种高效控制策略,能够实现对电机转矩和磁链的精确控制,从而提高电机的动态性能和稳态性能。
然而,在实际应用中,矢量控制系统的设计和调试过程往往复杂且耗时。
因此,利用MATLAB/Simulink进行永磁同步电机矢量控制系统的仿真研究,对于深入理解矢量控制原理、优化控制策略以及提高系统性能具有重要意义。
本文旨在通过MATLAB/Simulink平台,建立永磁同步电机矢量控制系统的仿真模型,并对其进行仿真分析。
本文将对永磁同步电机的基本结构和数学模型进行介绍,为后续仿真模型的建立提供理论基础。
本文将详细阐述矢量控制策略的基本原理和实现方法,包括坐标变换、空间矢量脉宽调制(SVPWM)等关键技术。
在此基础上,本文将利用MATLAB/Simulink中的电机控制库和自定义模块,搭建永磁同步电机矢量控制系统的仿真模型,并对其进行仿真实验。
本文将根据仿真结果,对矢量控制系统的性能进行分析和评价,并提出优化建议。
通过本文的研究,读者可以全面了解永磁同步电机矢量控制系统的基本原理和仿真实现方法,为后续的实际应用提供有益的参考和指导。
本文的研究结果也为永磁同步电机控制技术的发展和应用提供了有益的探索和启示。
二、永磁同步电机数学模型永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)是一种高性能的电机,广泛应用于各种工业领域。
为了有效地对其进行控制,我们需要建立其精确的数学模型。
PMSM的数学模型主要包括电气方程、机械方程和磁链方程。
PMSM的电气方程描述了电机的电压、电流和磁链之间的关系。
在dq旋转坐标系下,电气方程可以表示为:V_d &= R_i I_d + \frac{d\Phi_d}{dt} - \omega_e \Phi_q \ V_q &= R_i I_q + \frac{d\Phi_q}{dt} + \omega_e \Phi_d其中,(V_d) 和 (V_q) 分别是d轴和q轴的电压;(I_d) 和 (I_q) 分别是d轴和q轴的电流;(\Phi_d) 和 (\Phi_q) 分别是d轴和q轴的磁链;(R_i) 是定子电阻;(\omega_e) 是电角速度。
辽宁工业大学电力系统自动化课程设计(论文)题目:励磁机励磁控制系统设计院(系):电气工程学院专业班级:电气工程及其自动化学号: 080303109学生姓名:常佳宁指导教师:(签字)起止时间:2014.12.15—2014.12.26课程设计(论文)任务及评语院(系):电气工程学院教研室:电气工程学院Array注:成绩:平时20% 论文质量60% 答辩20% 以百分制计算摘要在电力系统运行中,同步发电机的励磁系统对于维持发电机端电压、分配并列运行机组之间的无功分配、提高电力系统稳定性等方面起着重要的作用。
并且,励磁控制系统是同步发电机的一个重要组成部分,在保证电能质量、无功功率合理分配和提高电力系统运行的可靠性方面起着十分重要作用。
同步发电机励磁控制器是同步发电机控制系统的核心,本文采用了PID控制系统设计了100MW汽轮机组励磁机励磁控制系统,该系统是一个典型的反馈控制系统,PID控制器简单易懂,使用中不需精确的系统模型等先决条件,因而成为应用最为广泛的控制器。
本设计进行了模糊自调整PID 控制设计,克服了传统PID 控制非线性差、对模型要求高的缺点,并深入进行了基于免疫算法的模糊PID 控制设计,把生物学中的细胞免疫原理用于模糊PID 控制器中,加强了控制器的自我校正能力,自适应能力,提高了控制精度和速度。
关键词:最优控制理论;励磁系统;仿真目录第1章绪论 (1)1.1励磁自动控制系统概况 (1)1.2本文设计内容 (1)第2章发电机励磁系统设计 (3)2.1励磁控制系统功能 (3)2.2励磁控制系统总体设计方案 (3)2.3励磁控制系统测量比较单元电路设计 (4)2.3.1电压的测量 (5)2.3.2比较整定 (5)2.3.3比较整定电路的整定 (6)第3章系统传递函数的建立 (7)3.1他励直流励磁机的传递函数建立 (7)3.2励磁器各单元的传递函数 (8)3.2.1 电压测量比较单元 (8)3.2.2 综合放大单元 (8)3.2.3 功率放大单元 (9)3.3励磁控制系统的传递函数 (9)3.4同步发电机的传递函数 (10)第4章PID控制与系统的仿真分析 (11)4.1系统仿真模型的设计.......................... 错误!未定义书签。
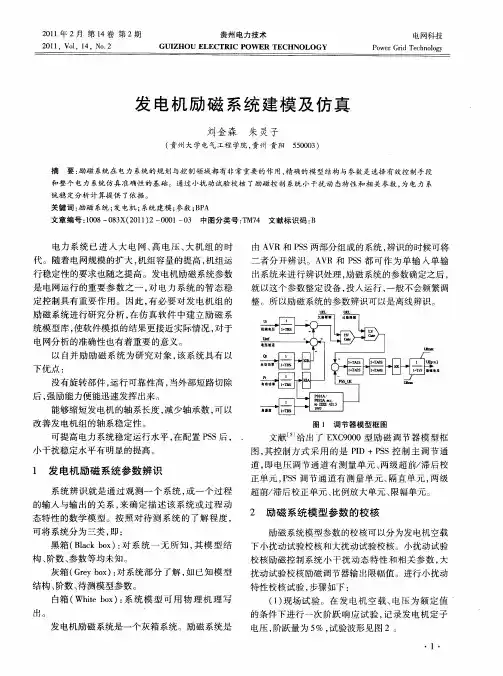
可控相复励无刷励磁系统仿真袁鹏;李红江;甄洪斌【摘要】相复励无刷励磁系统是船舶等移动电站中应用较为广泛的一种励磁装置,用于为同步发电机提供励磁功率、调节输出电压和控制无功分配.本文结合实际相复励无刷励磁系统,通过分析各个部分数学模型得出系统传递函数.针对不同工况下的仿真结果表明,所建立的模型能够较为准确地反映同步发电机的动态特性.【期刊名称】《船电技术》【年(卷),期】2010(030)003【总页数】5页(P22-26)【关键词】船舶电站;相复励;无刷励磁;仿真【作者】袁鹏;李红江;甄洪斌【作者单位】海军工程大学电气与信息工程学院,武汉,430033;海军工程大学电气与信息工程学院,武汉,430033;海军工程大学电气与信息工程学院,武汉,430033【正文语种】中文【中图分类】TM301.44励磁系统是同步发电机核心控制系统之一,用于提供励磁功率、调节输出电压、控制无功分配,对发电机动态行为具有很大的影响。
相复励无刷励磁系统是船舶等移动电站中应用较为广泛的一种励磁装置,但是 IEEE和中国励磁系统数学模型专家组发布的电力系统稳定计算励磁模型中并没有相应的建模[1,2],本文参照其交流励磁模型,从各部件的工作原理出发,建立了系统传递函数。
根据实际发电机励磁调整步骤[3],逐步整定模型参数。
最后通过突加突卸负载动态过程的仿真,验证了模型的准确性。
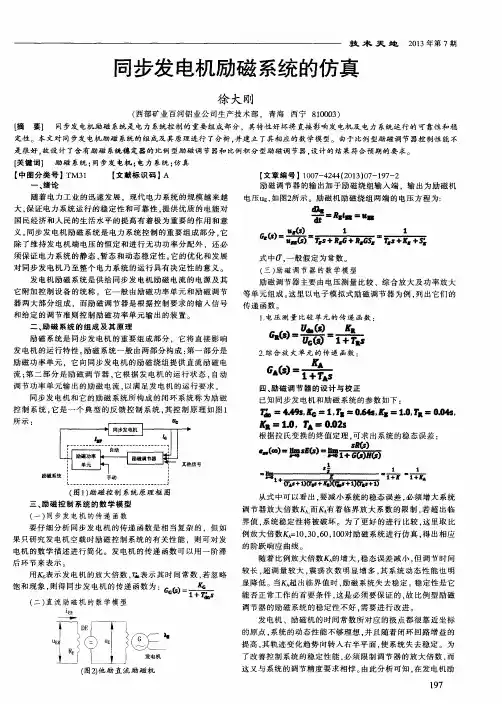
1 同步电机无刷励磁系统现代船舶电站同步发电机采用的相复励无刷励磁系统如图1所示。
发电机励磁绕组由励磁机旋转电枢经旋转整流器供给直流励磁电流;电压经复励阻抗jx移相后与电流互感器CT电流经相复励变压器 ZL电磁迭加,整流后送至励磁机的定子励磁绕组。
发电机端电压调整由AVR通过控制直流侧分流晶闸管的导通角实现。
无刷励磁系统最大的特点是采用转场式主发电机与转枢式励磁机相互配合,省去了电刷滑环。
相复励装置是目前广泛应用的按扰动补偿设计的励磁装置,其特点是励磁电流能随负载电流的大小和功率因数的变化作相应调节,抵消发电机电枢反应作用,维持端电压不变。
同步发电机励磁系统的PID控制仿真李昂【摘要】励磁系统是同步发电机的重要组成部分,也是一个典型的反馈控制系统,单纯按机端电压偏差进行的PID控制其阻尼特性较差,易产生低频振荡.本设计引入辅助控制环节一电力系统稳定器(PSS)增加正阻尼转矩,通过建立基于MATLAB/Simulink的典型单机-无穷大系统发电机励磁系统的仿真模型,模拟了同步发电机在短路等大扰动下暂态过程的运行特性,仿真结果表明该设计能够有效地提高系统的阻尼作用,改善发电机的运行特性,提高电力系统的动态稳定性.%Excitation system is an important part of synchronous generator, and it is also a typical feedhack control system,simply by terminal voltage deviation of the PID control the damping characteristics of poor, easy to produce low-frequency oscillations. The design of the introduction of auxiliary control unit-power system stabilizer (PSS) is to increase the damping torque, through established the simulation model on the PID control in excitation system of a typical single-machine infinitepower system based on MATLAB/Simulink, to simulate the synchronous generator's transient operating characteristics under large disturbance such as short-circuit fault, simulation results show that the design can improve the system damping and the generator operating characteristics, increase power system dynamic stahility.【期刊名称】《电子设计工程》【年(卷),期】2011(019)002【总页数】4页(P104-106,109)【关键词】同步发电机;励磁系统;PID控制;电力系统稳定器;MATLAB/Simulink 【作者】李昂【作者单位】陕西理工学院,电气工程系,陕西,汉中,723003【正文语种】中文【中图分类】TM921.5同步发电机是电力系统唯一的有功功率电源,也是重要的无功功率电源,其控制性能的好坏将直接决定电力系统的安全与稳定运行。
上海电力学院《自动控制原理》MATLAB仿真实验报告课程:自动控制原理题目:发电机励磁控制系统院系:电气工程学院班级:2010021姓名:学号:20102168发电机励磁控制系统(PID 、超前、滞后控制)仿真一、仿真模型图1发电机励磁控制系统模型如图所示为发电机励磁控制系统模型。
功率励磁装置的传递函数为11f T S+,发电机的等效传递函数为11d T S'+,10.05T s =,0.5f T s =,5d T s '=,20K =,分别用不同的控制器(PID ,超前,滞后)使系统相位域量50γ≥,误差系数大于40。
,在实验过程中比较不同控制器的特点。
二、系统控制器 (1) PID 控制器PID 控制器有三个可以调整的参数,即p K 、i T 和d T ,11c p d i G K T s T s⎛⎫=++ ⎪⎝⎭这种控制器既有比例作用的及时迅速,又有积分作用的消除余差能力,还有微分作用的超前控制功能。
当偏差阶跃出现时,微分立即大幅度动作,抑制偏差的这种跃变;比例也同时起消除偏差的作用,使偏差幅度减小,由于比例作用是持久和起主要作用的控制规律,因此可使系统比较稳定;而积分作用慢慢把余差克服掉。
只要三个作用的控制参数选择得当,便可充分发挥三种控制规律的优点,得到较为理想的控制效果。
PID 控制器特别适用于过程的动态特性是线性的而且控制性能要求不太高的场合。
(2) 超前校正控制器超前校正装置的主要作用是通过其相位超前效应来改变频率响应曲线的形状,产生足够大的相位超前角,以补偿原来系统中元件造成的过大的相位滞后。
利用其相位超前特性,可以增大系统的稳定裕度,提高动态响应的平稳性和快速性;对提高系统稳态精度作用不大,系统抗干扰能力有所下降(一般用于稳态精度已基本满足要求,但动态性能差的系统);利用校正函数()11c p TSG s K TSα+=+,()1α>求得参数进行校正。
现代永磁同步电机控制原理及matlab仿真模型文章标题:现代永磁同步电机控制原理及matlab仿真模型摘要:现代永磁同步电机在工业应用中具有重要的地位,其控制原理和matlab仿真模型是研究永磁同步电机的重要内容。
本文结合控制原理和matlab仿真模型,对现代永磁同步电机进行全面评估和深度探讨,并对其进行个人观点和理解的分享。
正文:1. 现代永磁同步电机的基本结构和工作原理永磁同步电机是一种采用永磁材料作为励磁的同步电动机,其基本结构包括定子和转子两部分。
在工作时,永磁同步电机通过控制电流,实现对转子的精准控制,从而实现高效的能量转换。
2. 现代永磁同步电机的控制原理现代永磁同步电机的控制原理包括磁链定向控制、矢量控制和无传感器控制等技术。
在磁链定向控制中,通过对转子电流和定子电流进行精确控制,使得永磁同步电机能够实现高效的转矩输出和速度控制。
矢量控制技术可以更加准确地控制永磁同步电机的转子位置和速度,从而提高了电机的动态响应性能。
3. 现代永磁同步电机的matlab仿真模型在matlab中,可以通过建立电机的数学模型和控制算法,对永磁同步电机进行仿真分析。
采用Simulink工具箱,可以构建永磁同步电机的电路模型和控制系统模型,并进行多种工况下的仿真,从而验证电机的控制性能和稳定性。
4. 对现代永磁同步电机控制原理及matlab仿真模型的个人观点和理解现代永磁同步电机通过先进的控制原理和matlab仿真模型,能够实现高效的能量转换和精准的控制。
在工程领域中,永磁同步电机具有广阔的应用前景,其控制原理和仿真模型研究对于提高电机的性能和稳定性具有重要意义。
总结与回顾:通过编写本文,我对现代永磁同步电机的控制原理和matlab仿真模型有了更深入的理解。
永磁同步电机作为一种高效、精准的电机,在工业应用中具有广泛的应用前景。
掌握其控制原理和仿真模型,对于提高电机性能和应用推广具有重要意义。
结语:现代永磁同步电机的控制原理及matlab仿真模型是一个充满挑战和机遇的领域,希望通过本文的了解和研究,能够对读者有所启发和帮助。
基于MULTISIM仿真软件的发电机励磁控制器设计摘要:现代研发愈来愈多依赖仿真软件进行指导。
本文通过对技术要求进行了理论分析,并设计了一种发电机励磁控制器。
同时通过MULTISIM仿真软件对这种发电机励磁控制器进行了仿真模型搭建,整个仿真系统当中包含了各种保护控制,涵盖过压保护、欠压保护以及浪涌保护等功能。
最终利用仿真结果指导设计了实物控制器模型,成功与发电机进行了联合运行,验证了理论方案的合理性和准确性。
关键词:电路仿真;MULTISIM;发电机励磁控制器1.引言:在快速发展的今天,如何加速科研步伐,加强科研能力显得至关重要。
在以往,企业和科研机构通常通过硬件开发平台进行新产品的研制,这种方式要求研发人员利用现有器件搭建一个新产品的简易原型,然后再进行开发与调试。
现如今,这种开发方式因为其周期长、灵活性差、不易更改等缺点,已经越来越难以满足当今快速的开发节奏。
所以,各种电路仿真软件应运而出。
研发人员可以通过软件模拟实际电路的运行工况,并且实时调节电路结构和元件参数,极大地加速了研发进程。
目前,电路仿真软件种类繁多,使用场合多种多样。
其中,较为常用的有SIMULINK[1]、Saber[2]、Multisim[3]、Psim[4]、Pspice[5]等等。
本文则利用上述软件中的Multisim仿真工具进行了整个发电机励磁控制器的模型搭建和仿真调试验证。
并最终利用此仿真指导搭建出了实物模型,能够完成与发电机的联合运行任务。
2.发电机控制基本原理和要求本文需要控制的发电机为航空发电机。
主要给平台和机载设备提供能源供应,保障各种飞行条件下设备的电源供应。
整个发电机系统的控制原理如下图 1所示:图 1 发电机系统控制原理图从图中可以看到,交流发电机的输出电压经过整流后与发电机控制器相连,给控制器供给工作电压。
同时,发电机控制器检测发电机实际输出电压,并利用闭环反馈回路改变发电机的输出励磁电流,从而保持发电机能够保持稳定的输出电压。
电力系统自动化仿真实验报告
实验一:励磁自动控制系统仿真
(一)普通励磁自动控制系统仿真
励磁控制系统主要由励磁机、发电机、电压测量比较单元、综合放大单元、功率放大单元等组成。
励磁控制系统框图:
以上的放大单元分别取值为10、30、60,得到的曲线依次为: (1)放大单元值为10时
0246810
0.20.40.60.811.21.4
(2)放大单元值为30时
0246810
0.20.40.60.811.21.4
(3)放大单元值为60时
0246810
0.20.40.60.811.21.4
1.6
综以上图形,随着放大系数的增大,发电机电压与给定电压之间的误差在逐渐减小,但随着放大系数的增大系统的动态系能会变差,出现一定的振荡。
(二)加入PID 励磁自动控制系统仿真 励磁控制系统框图:
(1)放大单元值为10
时
0246810
0.20.40.60.811.21.4
(2)放大单元值为30时
0246810
0.20.40.60.811.2
1.4
(3)放大单元值为60时
0246810
0.20.40.60.811.2
1.4
以上PID 模块的控制参数分别设置为:Kp ,Ki ,Kd 分别设置为1,0.1,0.15。
经过PID 校正后,由以上两种情况的图形对比知,调节时间与振荡次数较未校正前都有所减少。
所以增设PID 校正后提高了系统的快速性和平稳性,提高了系统的性能。
二、三相桥式整流电路仿真 带阻感性负载的仿真
根据晶闸管三相桥式整流电路的结构,在模型窗口建立主电路仿真模型,绘制加入同步装置和脉冲触发器等的三相桥式整流系统模型如下图所示。
Continuous powergui
i +-
ia2
i +-ia1
i +-
ia
i +-
i
v +-
Vca
Vc
v
+
-Vbc
Vb v
+-Vab
Va v +-V
g A B C
+
-Universal Bridge
alpha_deg
AB BC CA Block
pulses
Synchronized 6-Pulse Generator
Scope
RL
90Constant1
0Constant
交流电压源的参数设置, 三相电源的相位互差120,设置交流峰值电压为220V ,频率为50HZ 。
负载参数的设置,R=10欧姆,L=10mh, C=inf.常数模块, 该模块只有一个输出端,所以只要改变参数对话框的数值的大小,即可改变触发信号的控制角。
仿真/参数窗口中,选择ODE23S 仿真算法,仿真时间为0~0.05S ,将相误差设置为1e-3(1*10-3),开始仿真时间为0,停止时间为0.02。
其它参数为默认值。
当移相控制角从0~120°变化时整流器输入 的ia & i b & i c,负载电压,负载电流,同步脉冲触发器输出的脉冲.
仿真波形结果如下图所示:
(1) a=0°时的输出波形
-5000500
-50050
00.51
0200
400
00.010.020.030.040.05
2040
(2) a=30°时的输出波形
-5000500
-50050
00.51
0200
400
00.010.020.030.040.05
2040
(3) a=60°时的输出波形
-5000500
-50050
00.51
0200
400
00.010.020.030.040.05
2040
(3) a=90°时的输出波形
-5000500
-50050
00.51
0200
400
00.010.020.030.040.05
2040。