第八章逻辑控制电路赵
- 格式:ppt
- 大小:490.50 KB
- 文档页数:62
电路基础原理理解电路中的电路逻辑与电路控制电路是电子技术的基础,它是由电子元器件组成的一种电子线路。
对于电子工程师而言,了解电路的基础原理尤为重要。
在电路中,电路逻辑和电路控制是两个重要的概念,它们对电路的功能和操作起着至关重要的作用。
首先,我们来讨论电路逻辑。
电路逻辑是指电路中各个电子元器件之间的逻辑关系。
在电子电路中,逻辑电平可以表示为高电平和低电平。
高电平通常表示逻辑“1”,低电平则表示逻辑“0”。
当电路中的信号在逻辑门内传输时,根据逻辑门的真值表,输入的信号将通过门电路的内部布局,最终将输出相应的逻辑结果。
这种逻辑关系在数字电路中起到了重要的作用。
接下来,我们谈谈电路控制。
电路控制是指利用电子元器件或电子系统来控制电路的工作状态。
控制电路可以通过开关、传感器、计时器等实现。
例如,在自动化领域中,我们经常会见到的温度控制器。
这个设备通过控制电流和电压,监测温度并进行相应的控制,确保温度在设定的范围内。
另一个例子是门禁系统,该系统通过读取身份证或密码,控制门的打开和关闭。
这些例子中,电子元器件或电子系统起到了控制电路的作用。
在实际应用中,电路的逻辑和控制往往紧密相连。
逻辑电路可以作为控制电路的输入,通过逻辑判断来控制电路的工作状态。
逻辑门的输出信号可以驱动继电器、触发开关以及其他控制装置。
此外,控制电路中的开关和传感器也能够输出对应的逻辑电平信号,进一步影响电路中的逻辑关系。
电路的逻辑与控制不仅在数字电路中有广泛应用,在模拟电路中也同样重要。
模拟电路中的逻辑通常通过比较电压或电流的大小来判断,并将结果输出到控制电路中。
控制电路则通过增加或减少电流、改变电压等方式控制电路的运行状态。
总之,电路的逻辑和控制是电子工程师必须要理解和掌握的基础知识。
逻辑决定了电路中信号的传输和处理,而控制则实现了对电路的操作和控制。
无论是数字电路还是模拟电路,在实际工程项目中,了解逻辑和控制对于设计和开发电子产品都是至关重要的。
如何使用逻辑门设计和实现电子电路的控制逻辑逻辑门是现代电子学中非常重要的基础组件,它可以根据输入信号的逻辑值产生输出信号。
逻辑门的设计和实现对于电子电路的控制逻辑至关重要。
本文将介绍如何使用逻辑门设计和实现电子电路的控制逻辑。
一、逻辑门的基本原理逻辑门是基于逻辑运算的电子元件,它能够根据输入的逻辑信号产生相应的逻辑输出信号。
常见的逻辑门有与门(AND)、或门(OR)、非门(NOT)、与非门(NAND)、或非门(NOR)、异或门(XOR)等。
逻辑门的输入和输出都是高电平(1)或低电平(0),根据输入的不同组合,逻辑门可以实现各种复杂的逻辑控制功能。
二、逻辑门的符号和真值表每种逻辑门都有其独特的符号表示和对应的真值表。
例如,与门的符号是一个圆圈,有两个输入端和一个输出端,真值表显示只有当两个输入信号都为1时,输出信号才为1。
不同的逻辑门有不同的符号和真值表,掌握它们对于设计和实现复杂逻辑电路非常重要。
三、逻辑门的设计和实现步骤1.明确逻辑功能:根据逻辑电路的功能需求,确定所需的逻辑关系,例如判断条件、运算方法等。
2.选择适当的逻辑门:根据逻辑功能的要求,选择合适的逻辑门进行设计和实现。
不同的逻辑门有不同的特点和应用场景,需要根据具体需求做出选择。
3.确定输入和输出:根据逻辑功能,确定所需的输入和输出信号的数量和类型。
例如,与门需要两个输入信号和一个输出信号。
4.绘制逻辑电路图:根据逻辑门的真值表和对应的输入输出关系,画出逻辑电路的图示。
逻辑电路图要清晰简洁,能够直观地表达逻辑关系。
5.根据逻辑电路图,选择合适的逻辑门进行连接和布线。
将逻辑门按照电路图的要求进行连接,确保输入和输出信号的正确传递和逻辑运算。
6.搭建电路原型:根据逻辑电路图,使用逻辑门和其他必要的元器件,搭建电路原型进行测试和验证。
通过观察输出信号和预期结果的一致性,判断逻辑电路的正确性。
7.优化和改进:根据测试和验证的结果,对逻辑电路进行优化和改进。
控制电路的工作原理
电路控制是通过合理的设计和配置电路元件,以实现特定的功能和控制目标。
控制电路的工作原理主要涉及以下几个方面:
1. 信号传输:控制电路通常需要通过信号传输来实现信息的传递和转换。
信号可以是电流、电压或频率等,在电路中通过导线、电缆或无线电波进行传输。
2. 逻辑运算:控制电路中的逻辑运算是基础的操作,它通过将输入信号进行逻辑运算,并通过输出信号来实现控制目标。
逻辑运算可以包括与门、或门、非门等,通过它们的组合可以实现更复杂的控制逻辑。
3. 时序控制:许多控制电路需要根据特定的时间序列来实现控制目标。
时序控制可以通过计时电路、时钟信号等方式实现,以确保电路按照事先设计的顺序和时间来执行。
4. 脉冲宽度调制(PWM):PWM是一种常用的控制电路技术,通过控制信号的高电平和低电平时间比例来实现对输出的控制。
PWM可以用于调节电机速度、控制亮度等应用场景。
5. 反馈控制:在一些需要持续监测和调整的控制电路中,反馈控制起着重要的作用。
通过采集反馈信号并与设定值进行比较,可以实现对输出信号的动态调整和稳定控制。
除了以上几个方面,控制电路的工作原理还与具体应用场景和
控制目标有关。
因此,在设计和实现控制电路时,需要根据具体情况进行综合考虑和优化。
以X-D图设计逻辑控制电路中国砚代教甫装备2007年第9期(总第55期)以X—D图设计逻辑控制电路廖伟超佛山高明区技工学校广东佛山528500摘要:本文针对逻辑控制电路设计过程中的一些实际问题,特别是执行元件的动作多于2n个信号时,采用x—D图(信号一动作图)可以较直观,较容易实现.关键词:X—D图逻辑控制电路仿真一,一般逻辑控制电路的实现方案和设计方法一般逻辑控制电路的实现方案可以用继电器,数字逻辑电路,单片机,PLC(可编程逻辑控制器),PLD(可编程逻辑控制元件)等来实现.除用PLC的步进指令外,其他的一般都要进行逻辑设计,常见逻辑设计的方法有:1.经验设计;2.如果是组合逻辑电路,先根据电路要求列出真值表,后写出逻辑表达式,直接或通过卡诺图化简逻辑表达式从而画出逻辑图;3.如果是时序逻辑电路先根据电路要求作出状态图或状态表,简化状态,确定触发器个数和特性方程,经过化简得出组合逻辑表达式和触发器的驱动方程,画出逻辑图.二,萌发采用X-D图设计逻辑控制电路的原因由于采用经验设计方法来设计很大程度上限于设计者的设计经验,但碰到难度较大的程序方案时,比较难按部就班地进行设计,对于采用逻辑化简的方法,特别对于时序逻辑电路的设计难度较大,而采用x—D图来设计逻辑控制电路,对于信号与执行动作的关系一目了然,较直观,较容易地解决问题.同时结合Electron—iCSWorkbench软件进行仿真,可以直接检查程序的对错,便于针对出现问题进行修改,且最后得出的结果可收稿日期:2007—03—14作者简介:廖伟超,男,大学本科,助教..6直接用于数字逻辑电路,PLD,和西门子的通用逻辑控制模块LOGO等方案.其他的如继电器,PLC基本指令等通过逻辑关系转换也不难得出.三,以X—D图设计逻辑控制电路经过实践,该方法能较直观,顺利地设计逻辑控制电路,现以一有防爆要求的食品加工机械逻辑控制电路的设计作说明:1.动作过程与电气控制要求该系统为两缸往复系统,系统由两个双作用单出杆气缸组成执行机构,分别以A,B表示,每个循环有六个动作,分别是:(1)A缸伸出从1—至『L2(2)A缸退回从2—1(3)B缸伸出从3—4(4)B缸退回从4—3(5)B缸伸出从3—4(6)B缸退回从43(7)在按下手动开关q之后,A,B,两个气缸按给定的程序自动运行,并能连续循环动作.2.动作说明A,B——分别代表两个双作用气缸A1,B1——分别代表两个气缸的伸出动作.A0,B0——分别代表两个气缸的退回动作.傩@2.膨2007年第9期(总第55期)中国砚贰教育装备ai,bl——分别代表两个气缸伸出位置开关发出的信号.aO,bO——分别代表两个气缸退回位置开关发出的信号.AI*,Bl术——分别代表两个气缸伸出时的执行信号(驱动电磁铁的信号).AO*,BO术——分别代表两个气缸退回时的执行信号(驱动电磁铁的信号).3.程序流程图说明:气缸的动作顺序如下闭合开关q—A缸伸出一A缸退回一B缸伸出一B缸退回一B缸伸出一B缸退回. ao,bo,al,bt,分别为气缸到位后由位置开关发出的原始信号.4.校核程序N个执行元件的程序有2N个位置开关,N对位置开关组合起来有2种不同状态最多可控制2w个动作的程序.实际程序中,由于一执行元件多次动作,整个程序中动作次数多于2w次,或由于位置开关组合达不~I]2N 种,程序中不同动作将由同一个控制信号组合来控制.这样系统会出现误动作或卡死,这就需要校核程序.(i)列程序相位,信号关系表行程程序中存在标准程序和非标准程序.行程程序用同一信号组合控制不同动作,部分执行信号既不能用原始信号又不能在原始信号"与"组合中找到,需要增加记忆元件(触发器)的程序为非标准程序;行程程序中每一个动作都由不同的信号组合来控制,则该程序为标准程序.因此判断该系统行程程序是否为标准程序, 可检查最小项,有重复小项出现的是非标准程序,无重复小项出现的是标准程序.下面通过程序相位,信号关系表说明程序校核过程(见表i):表i程序相位,信号关系表相位I11l1l1l1I1程序名稚IAAolBIBolBtIBo终端信号qQ1QobIbob1bo(bo)信号a舢Q1Qo舢组合bb.bob0b】boblbo二进制表示最小项(oo)10O0O1O0O1O0十进制表示最小项(O)20l0l00一——I-?IIl一一l'I插入元件▲×i▲Yi▲Xo▲由于出现0~0,i~i重复项,即aobo要控SUB.两次动作,aobt要控制B.两次动作,故该程序为非标准程序, —一,邑嬲@需另加入记忆元件▲X?,▲Y?,▲Xo,▲Y o,如上表所示, 分断重复小项区间段.新程序为【AlX1AoB1Y1BoXoB1Y oBo】(2)校核新程序(见表2)表2插入记忆元件后程序相位,信号关系表相位J1J2J3J4I5J6I7I8I9J10程序名称lAl×lAoIBllI&llBllY0l&终端信号q1)aQ0by1bobbD(b.)二进制表十(i0O0)(0010)(0111)(0O01)(0100)示最小项'(1010)(01i0)(O011)(0i0i)(0CO0)十进制表示最小项(0)8i026731540由于没有出现重复项,故该程序为标准程序.5.绘制X—D图行程程序的整个设计过程中,可采用X—D图求出标准程序的逻辑表达式(各个动作的执行信号).X-D图其特点是直观性强,并且在X—D图中可直接看出行程信号和被控缸的动作状态,能按一定的方法和原理找出并排除障碍信号,求出各程序动作的执行信号.(1)X-D图的概念X—D图法又称X—D图线法(信号——动作状态图法简称).它根据行程程序的工作程序将执行动作和信号在整个循环过程中的状态用相应的图线表示在X—D图中,并从该图中找出并排除障碍,求出被控程序动作的执行信号.(2)X—D图的绘制步骤①绘X—D图方格线绘X—D图方格线,将已知程序相位填入最上面小方格中,并填入相应程序的动作符号;最右边填写求出的执行信号;最左边由上到下分2N格,N为气缸数+记忆元件数,图中分8格,填入气缸两个动作符号,并填入该动作主控信号及记忆元件输出和控制信号.如At动作主控信号为bo,将At,bo都填入一格;Bt的两次动作主控信号为ao~13xo,则Bl,ao,xo,都填入一格,同样可填其它气缸动作和主控信号.②绘制动作线(D线)按行程程序表示的次序画出程序动作从起点到终点的横线,该横线称动作线,其上下位置与最左纵栏中动作符号相对应,横线起点用"0"表示,终点用"×"表示,连接线用粗实线画出,B缸两次伸出和退回动作都应在相应栏中画出.③绘制信号线(X线)按程序的次序画出信号从起点到终点的横线,该横.7中国砚代苏唷装各2007年第9期(总第55期)线称信号线,其上下位置应与最左纵栏信号符号相对应,起点用"0"表示,终点用"×"表示,连接线用细实线表示.④绘制x—D图应注意的问题A.程序的最未一个动作和第一个动作应看成是闭合的,即第10相位的B.动作后紧接着第1相位的A动作.B.程序的纵向分界线是执行元件和位置开关的切线,信号起点就是信号开始执行点.C.位置开关发出的都是长信号,即气缸动作到位后,相应的行程阀一直有信号,并且保持到气缸相反动作的开始.⑤绘Nx—D工序动作状态图X-一D1234567891D执行信号蛆A'×'AnR'Y'R门×力R'YR a:q.bo.1b0-A'X0.y0×1:x12AoaO:Ba0.Y03XO(R1X1?X0.y1y1B矗y1x1.4yo日nyo.X0a1X1=a15×16boVV×0___X口!b0y1b1———{Y;-b1.Xl7Y18b1—Yb1.x0Y0图1X—D图(3)以X—D图求出各动作的执行信号①障碍信号或信号的障碍两种情况A.I型障碍——主控信号本身比动作信号线长.B.II型障碍——由于主控信号多次出现,障碍被控制动作.C.用"…"表示信号的障碍段.②排除障碍的方法与过程并求出逻辑表达式A.逻辑"与"门排障法——在X—D图中利用主控信号与制约信号的选取将长信号变成短信号,可排除I,II型障碍.排除障碍原则是保留主控信号的执行段,去掉障碍段,自由段可保留可去掉.B.列写执行信号:将主控信号排除障碍后填入X—D8'图最右一栏,从而写出各动作执行信号.6.绘制逻辑控制原理图根据执行信号的逻辑表达式画出逻辑图:图2逻辑控制原理图四,用EIectronicsWorkbench软件进行仿真通过用E1ectroniCSWorkbench软件进行仿真可以确认程序是正确的,但在第1,2,3相位Bo,还有动作,第4,5相位A还有动作,这对于气动和液压控制没有影响,但如果是用电动机拖动的电路就会出现在该相位堵转,因此用电动机拖动的电路还要给Bo,Ao*找制约信号得Bo=ylX1+yo.Xob0;Ao=x1.bo再仿真,程序能满足控制要求.五,结束语综上所述采用X—D图能简单,直观,合理地设计逻辑控制电路,由于应用时间不长,还没有很系统地分类整理,今后将进一步研究.参考文献[1]康华光主编.电子技术基础数字数字部分[M].北京:高等教育出版社,1998[2]许福玲,陈尧明主编.液压与气压传动[M].北京:机械工业出版社,2OO2[3]王划一主编.自动控制原理[M].北京:国防工业出版社,2OO1。
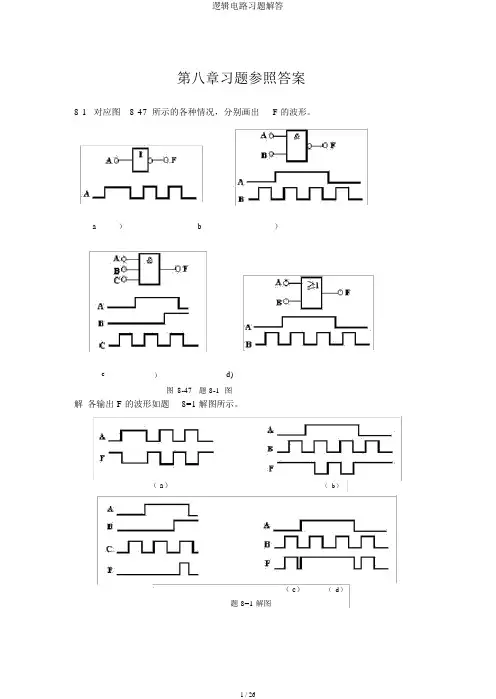
第八章习题参照答案8-1对应图8-47所示的各种情况,分别画出 F 的波形。
a)b)c)d)图8-47题 8-1图解各输出 F 的波形如题8=1 解图所示。
( a)(b)( c)(d)题 8=1 解图8-2 若是“与”门的两个输入端中, A 为信号输入端, B 为控制端。
设 A 的信号波形如图 8-48 所示,当控制端 B=1 和 B=0 两种状态时,试画出输出波形。
若是是“与非”门、“或”门、“或非”门则又如何?分别画出输出波形,最后总结上述四种门电路的控制作用。
图 8-48题8-2图解各种门电路的输出波形如图5- 4 所示。
与门与非门或门或非门图 5-4 习题 5- 2 的解图它们的控制作用分别为:(1)与门:控制端 B 为高电平时,输出为 A 信号;控制端 B 为低电平时,输出为低电平。
( 2)与非门:控制端 B 为高电平时,输出为 A 信号;控制端 B 为低电平时,输出为高电平。
( 3)或门:控制端 B 为高电平时,输出为高电平;控制端 B 为低电平时,输出为 A 信号。
( 4)或非门:控制端 B 为高电平时,输出为低电平;控制端 B 为低电平时,输出为A信号。
8-3 对应图 8-49 所示的电路及输入信号波形,分别画出 F 、 F 、 F 、 F 的波形。
1234a)b)c)d)e)图 8-49题8-3图解各电路的输出波形题8-3 解图所示。
( a)( b)( c)( d)题 8-3 解图8-4化简以下逻辑函数(方法不限)1) F AB A C C D D2) F A(C D CD) B CD A CD ACD3) F( A B)D(A B BD) C A CBD D 4) F AB CD A CDE BDE AC D EF A B A C C D D解 1)A B A C C D(屡次利用吸取率)A B A C DB AC DF A (CD CD) B CD A CD A CDA CD A CD BCD ACD A CD2)(合并同类项)CD CD BCDCD CDF A (CD CD) B CD A CD A CD或CD CD BCD A CD CDCDF(A B )D(A B BD) C A CBD D3)A B D A B C BD C A CBD DAB D A B C BD C A CBD再利用卡诺图,如题8-4 解图( a)所示。
互锁控制电路原理首先,互锁功能是通过使用几个相关的接点或开关来实现的。
这些接点和开关通过连接或断开电路来控制设备或系统的运行。
当其中一个接点或开关处于特定的状态时,其他接点或开关就不能改变其状态,从而实现了互锁功能。
互锁功能的原理是基于逻辑判断和动作反馈。
其次,逻辑控制是互锁控制电路的核心。
逻辑控制是通过逻辑运算电路来实现的,一般采用与门或或门组成的逻辑门电路。
逻辑控制电路接收输入信号,并按照设定的逻辑运算规则进行计算和判断,然后生成输出信号控制设备或系统的动作。
互锁控制电路通常由以下几个基本元件组成:电源、接触器、继电器、触点、限位开关和按钮开关等。
电源为整个电路提供电能,接触器是电气控制装置,用于打开或关闭电流回路。
继电器是电磁驱动的开关,用于控制较大功率负载。
触点是连接电路的部分,当触发条件满足时,触点会闭合或断开电路。
限位开关通常用于检测机械设备或系统的位置和行程,从而实现互锁保护功能。
按钮开关用于手动控制设备或系统的启停。
在互锁控制电路中,互锁信号的传递和判断是非常重要的。
当一个设备或系统发生故障或异常时,互锁信号会被传递到逻辑控制电路,通过逻辑运算电路的计算和判断,确定问题的原因,并采取相应的措施进行处理。
这些互锁信号的传递和判断可以通过接线和逻辑运算电路来实现。
为了保证互锁控制电路的可靠性和稳定性,还需要考虑以下几个因素:选择合适的电气元件和设备,确保其质量和性能符合要求;合理设计电气连接和布线,减少电气干扰和误操作的可能性;安装正确的保护装置,保护电气元件和电路免受过载、短路等故障的损害;定期维护和检修互锁控制电路,保持其正常运行和工作。
总的来说,互锁控制电路是一种重要的电气控制电路,可以实现设备或系统的互锁保护和顺序运行。
它的原理基于互锁功能和逻辑控制,通过逻辑运算电路和互锁信号的传递和判断,实现对设备或系统的控制和保护。
在设计和应用互锁控制电路时,需要考虑电气元件的选择、电路的连接和布线、保护装置的安装以及定期维护和检修等因素,以确保其可靠性和稳定性。
数字逻辑电路王秀敏第8章7.10第⼋章检测题⼀、可以⽤来暂时存放数据的器件叫寄存器。
⼆、移位寄存器除寄存数据功能外,还有移位功能。
三、某寄存器由D触发器构成,有4位代码要存储,此寄存器必须由 4 个触发器构成。
四、⼀个四位⼆进制加法计数器,由0000状态开始,问经过18个输⼊脉冲后,此计数器的状态为 0010 。
五、n级环形计数器的计数长度是n,n级扭环形计数器的计数长度是2n。
六、集成计数器的模值是固定的,但可以⽤清零法和置数法来改变它们的模值。
七、通过级联⽅式,把两⽚4位⼆进制计数器74161连接成为8位⼆进制计数器后,其最⼤模值是 256 ;将3⽚4位⼗进制计数器74160连接成12位⼗进制计数器后,其最⼤模值是4096 。
⼋、设计模值为38的计数器⾄少需要 6 个触发器。
习题[题8.1] 试画出⽤2⽚74LS194A 组成8位双向移位寄存器的逻辑图。
74LS194A 的功能表见表8.1.4。
解:电路逻辑图如图A8.1所⽰图A8.1[题8.2] 图P8.2所⽰电路是⽤8选1数据选择器74LS151和移位寄存器CC40194组成的序列信号发⽣器。
试分析在C P 脉冲作⽤下电路的输出序列信号(Y )。
图P8.2解:74LS194A 组成3位扭环形计数器210Q Q Q :000→001 →011 →111 →110 →100 →000,因此74LS151输出013764Y D D D D D D …=111100…。
[题8.3] 分析图P8.3的计数器电路,画出电路的状态转换图,说明这是多少进制计数器。
⼗六进制计数器74161的功能表如表8.2.2所⽰。
图P8.3解:采⽤同步预置数法,31LD Q Q =。
计数器起始状态为0011,结束状态为1010,所以该计数器为⼋进制加法计数器。
状态转换图略。
[题8.4] 分析图P8.4的计数器电路,说明这是多少进制的计数器,并画出电路的状态转换图。
⼗进制计数器74160的功能表如表8.2.6所⽰。

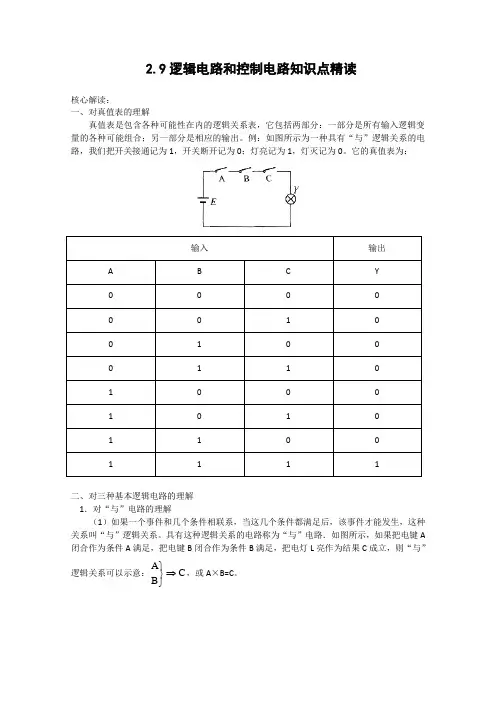
2.9逻辑电路和控制电路知识点精读核心解读:一、对真值表的理解真值表是包含各种可能性在内的逻辑关系表,它包括两部分:一部分是所有输入逻辑变量的各种可能组合;另一部分是相应的输出。
例:如图所示为一种具有“与”逻辑关系的电路,我们把开关接通记为1,开关断开记为0;灯亮记为1,灯灭记为0。
它的真值表为:二、对三种基本逻辑电路的理解 1.对“与”电路的理解(1)如果一个事件和几个条件相联系,当这几个条件都满足后,该事件才能发生,这种关系叫“与”逻辑关系。
具有这种逻辑关系的电路称为“与”电路.如图所示,如果把电键A 闭合作为条件A 满足,把电键B 闭合作为条件B 满足,把电灯L 亮作为结果C 成立,则“与”逻辑关系可以示意:C B A ⇒⎭⎬⎫,或A ×B=C 。
(2)“与”电路的特点①开关之间是串联关系.②当A、B输入都为“0”或A、B中有一个输入为“0”时,输出为“0”,当A、B输入都为“1”时,输出为“1”。
2.对“或”电路的理解(1)如果一个事件和几个条件相联系,当这几个条件中有一个满足,事件就会发生,这种关系叫“或”逻辑关系.具有这种逻辑关系的电路称为“或”电路。
如图所示,如果把电键A闭合当作条件A满足,把电键B闭合当作条件B满足,把电灯L亮当作结果C成立,则“或”逻辑关系可以示意为:或A+B=C。
(2)“或”电路的特点①开关之间是并联关系.②A、B输入都为“0”时,输出为“0”;A、B输入都为“1”或A、B中有一个输入为“1”时,输出为“1”。
3.对“非”电路的理解(1)如果条件A满足时,另一个条件B则不满足,条件A不满足时,另一个条件B则满足,它们的逻辑关系是相反的,这种关系叫“非”逻辑关系。
具有这种逻辑关系的电路叫“非”电路.如图所示。
(2)“非”电路的特点①单刀双掷开关.②当A输入为“1”时,B输入为“0”;当A输入为“0”时,B输入为“1”。
典题精讲:类型一:根据真值表判断逻辑关系【例题1】某逻辑电路的真值表如图,此逻辑电路为_______________电路,在真值表中X点拨:根据不同逻辑电路的真值表的特点进行判断.解析:根据真值表可判断此电路为“或”电路,根据“或”电路逻辑关系特点得X=1。
《逻辑电路与自动控制》知识清单一、逻辑电路基础1、逻辑门逻辑门是实现基本逻辑运算的电子电路,包括与门、或门、非门、与非门、或非门和异或门等。
与门:只有当所有输入都为高电平时,输出才为高电平。
或门:只要有一个输入为高电平,输出就为高电平。
非门:对输入信号取反,高电平变为低电平,低电平变为高电平。
与非门:先进行与运算,然后取反。
或非门:先进行或运算,然后取反。
异或门:当两个输入不同时,输出为高电平。
2、布尔代数布尔代数是用于描述逻辑关系的数学工具,在逻辑电路中有着重要的应用。
它的基本运算包括与、或、非,其运算规则与逻辑门的功能相对应。
通过布尔代数,可以对逻辑电路进行简化和分析。
3、组合逻辑电路组合逻辑电路的输出仅仅取决于当前的输入值,不存在记忆功能。
常见的组合逻辑电路有加法器、编码器、译码器、数据选择器等。
加法器:用于实现两个数的相加运算。
编码器:将一组输入信号转换为二进制代码。
译码器:将二进制代码转换为特定的输出信号。
数据选择器:根据控制信号从多个输入数据中选择一个输出。
二、时序逻辑电路1、触发器触发器是构成时序逻辑电路的基本单元,具有记忆功能。
常见的触发器有 SR 触发器、JK 触发器、D 触发器等。
SR 触发器:根据输入的 S(置位)和 R(复位)信号来确定输出状态。
JK 触发器:具有置位、复位、保持和翻转功能。
D 触发器:在时钟脉冲的上升沿或下降沿,将输入数据传送到输出端。
2、计数器计数器是一种能够对输入脉冲进行计数的时序逻辑电路。
可以分为同步计数器和异步计数器。
同步计数器:所有触发器的时钟脉冲同时输入,计数速度快。
异步计数器:触发器的时钟脉冲不是同时输入,计数速度相对较慢。
3、寄存器寄存器用于存储一组二进制数据,常用于暂存数据和在数字系统中传递信息。
三、逻辑电路的表示方法1、真值表真值表是列出输入变量的所有可能取值组合以及对应的输出值,能够直观地反映逻辑电路的功能。
2、逻辑表达式用逻辑运算符和变量表示逻辑电路的输出与输入之间的关系。
电路基础原理开关电路与逻辑控制电路基础原理是研究电子电路中电流、电压和功率等基本特性的学科,而在电子电路中,开关电路和逻辑控制是十分重要的一环。
开关电路是电子电路中常见的一种电路形式,它通过控制开关的通断状态来控制电路中的电流流动。
开关电路的应用广泛,从家用电器到计算机硬件,都离不开开关电路的存在。
开关电路可以分为模拟开关电路和数字开关电路。
模拟开关电路是利用模拟器件来实现电路的通断控制,常见的模拟开关电路有晶体管开关电路和继电器开关电路。
晶体管开关电路通过控制晶体管的基极电压和电流,来控制其工作状态,从而实现电路的开关功能。
晶体管开关电路具有开关速度快、体积小、功耗低等优点,广泛应用于电子设备和通信设备中。
继电器开关电路是利用电磁吸合和释放机制来实现开路和闭路的切换功能。
继电器开关电路具有较高的电流容量,适用于对电流要求较高的场合,比如用于电力系统中的接触器。
数字开关电路是借助逻辑门和数字集成电路实现电路的逻辑控制。
数字开关电路根据输入的数字信号0和1来控制开关的通断状态。
常见的数字开关电路有与门、或门、非门以及多路选择开关等。
这些数字门电路通过不同的逻辑运算来控制电路中的信号流动,从而实现逻辑控制功能。
在电子计算机、数字电路以及数码电子设备中,数字开关电路非常重要。
逻辑控制是指根据一定的逻辑规则和运算方式,来决定系统中的信号流动和控制信号的产生。
逻辑控制可以通过硬件方式实现,如使用逻辑门电路和数字集成电路,也可以通过软件方式实现,如使用编程语言编写的程序来实现逻辑控制功能。
逻辑控制在自动化控制系统和电子信息处理系统中,扮演着重要的角色。
在电子电路中,开关电路和逻辑控制相辅相成。
通过合理的设计和控制,开关电路可以实现逻辑控制,而逻辑控制则依赖于开关电路来实现信号的切换和控制。
两者共同作用,构建了电子电路中的独特控制系统。
总结起来,电路基础原理中的开关电路和逻辑控制是非常重要的概念和技术。
开关电路通过通断状态的变化来控制电路的运作,分为模拟开关电路和数字开关电路。
《电工学》第八章门电路和组合逻辑电路期末考试试题及答案一、填空题(1)在时间上和数值上均作连续变化的电信号称为模拟信号;在时间上和数值上离散的信号叫作数字信号。
(2)数字电路中,输入信号和输出信号之间的关系属于逻辑关系,所以数字电路也称为逻辑电路。
(3)在逻辑运算中,最基本的运算是与、或、和非运算,对应的电路称为与门、或门、和非门。
(4)在正逻辑系统约定下,“1”表示高电平,“0”表示低电平。
二、选择题(1)十进制数100对应的二进制数为(C)A、101110B、1100010C、1100100D、1000100(2)和逻辑式AB表示不同逻辑关系的逻辑式是(B)A、A B+D、AB A+B、A B⋅C、AB B+(3)数字电路中,机器识别和常用的数制是(A)A、二进制B、八进制C、十进制D、十六进制(4)一个两输入端的门电路,当输入为1和0时,输出不是1的门是(C)A、与非门B、或门C、或非门D、异或门(5)组合逻辑电路的输出取决于(A)A、输入信号的现态B、输出信号的现态C、输入信号的现态和输出信号变化前的状态(6)组合逻辑电路的分析是指(C)A、已知逻辑图,求解逻辑表达式的过程B、已知真值表,求解逻辑功能的过程C、已知逻辑图,求解逻辑功能的过程(7)组合逻辑电路的设计是指(A)A、已知逻辑要求,求解逻辑表达式并画逻辑图的过程B 、已知逻辑要求,列真值表的过程C 、已知逻辑图,求解逻辑功能的过程三、化简下列逻辑函数:(1) 1(1)F AB B AB A B AB A B A A B =++=++=++=+ (2)()()2()()()()F B AD AD B AD AD B A D B A D A D B B A D =+++=+⊕=⊕+=⊕(3) ()A B C AB ABC AB C AB ++=+=+(4) ()AB BC BC AB C B B AB C ++=++=+ 四、写出图示两电路的逻辑表达式及真值表。